以下、本発明の移植機の一実施の形態の苗移植機について説明する。
(実施の形態1)
本実施の形態1では、本発明の移植機の一実施の形態の苗移植機について、図面を用いて説明する。
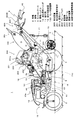
図1に、本実施の形態の苗移植機1の概略の左側面図を示し、図2に概略の平面図を示す。
野菜などの苗を移植する苗移植機1は、図1、図2に示す通り、走行車輪としての左右一対の前輪2および後輪3を備えた走行車体15と、走行車体15の前部に配置されたエンジン12およびミッションケース(主伝動ケースとも呼ぶ)4と、走行車体15の後部に配置された、苗22(図5参照)を圃場に植え付けるべく植付具11を上下揺動させる苗植付装置300と、その苗22を収容したトレイ20(図5参照)を供給するトレイ供給装置100と、そのトレイ供給装置100のトレイ20の育苗ポット21(図5参照)の内部に取出部材260を突入させて苗22を取りだして植付具11へ供給する取出装置200と、苗22の植付深さを一定に保つためのセンサ板710を含む植付深さ調整機構700(図14参照)と、鎮圧輪13、操縦ハンドル8、及び操縦ハンドル8の中央部に配置された操作部600等を備えて構成されている。
尚、本実施の形態の苗移植機1の特徴の一つである取出装置200の詳細な構成については、図7〜図9を用いて後述する。
また、本実施の形態の苗移植機1では、図1、図2に示す通り、エンジン12から出力される回転動力は、ミッションケース4により分岐され、左右一対の走行伝動ケース60を介して左右一対の後輪3に伝動されるとともに、ミッションケース4の後側に設けられた植付伝動装置18にも伝動される構成である。
即ち、本実施の形態の苗移植機1では、育苗ポット21から苗22を取り出して圃場の畝部に植付けるべく、ミッションケース4からの動力が植付伝動装置18に伝動されて、チェーンベルト202を介して取出装置200に伝動されるとともに、その植付伝動装置18に取り付けられた苗植付装置駆動機構400と、苗植付装置300を介して植付具11に伝達される。
また、本実施の形態の苗移植機1の植付動作は、苗植付装置駆動機構400により間欠的に行える構成である。
尚、本実施の形態の苗移植機1の特徴の一つである苗植付装置駆動機構400及び苗植付装置300の詳細な構成については、図10〜図12を用いて、後述する。
また、トレイ供給装置100には、図2に示す通り、トレイ搬送路111上にトレイ20が載置されていないことを検知するためのトレイ検知装置1100が設けられている。
本実施の形態の苗移植機1のトレイ供給装置100の送り動作には、(1)トレイ20の横方向一列分の育苗ポット21の苗が、取出部材260により順次取り出されるべく、苗置台110が、間欠的に左右横方向に送られる横送り動作と、(2)横方向一列分の全ての育苗ポット21の苗の取り出しが完了した後、苗置台110上のトレイ20が、トレイ送りロッド121により育苗ポット21の横方向一列分について下方向に送られる縦送り動作がある。
トレイ送りロッド121による縦送りは、トレイ20の裏面側の隣接する育苗ポット21間の溝部にトレイ送りロッド121の先端部が係合した状態となり、この状態でトレイ送りロッド121が側面視で略四角形の軌跡A(図6参照)を描いて回動することにより、トレイ20がトレイ搬送路111に沿って斜め下方に間欠的に縦送りされることで実行される。
尚、トレイ供給装置100、及びトレイ検知装置1100の詳細な構成については、図5〜図6を用いて後述する。
また、本実施の形態1の苗移植機1は、図1、図2に示す通り、ミッションケース4の後端の左右方向に配置された左右フレーム16の後部には、右寄りの位置に延びる主フレーム17を設けている。該主フレーム17の後端部には左右端側から後方に延びた操縦ハンドル8を設け、この操縦ハンドル8が主フレーム17および左右フレーム16を介してミッションケース4に支持された構成となっている。
これにより、作業者は、走行車体15の後方を歩きながら操縦ハンドル8で走行車体15の操向操作を行うことが出来る。
即ち、本実施の形態の苗移植機1は、左右一対の前輪2、2及び左右一対の後輪3、3によって畝Uを跨いだ状態で走行車体15を進行させながら、トレイ20に収容されている苗22を畝Uの上面に自動的に植え付けることが出来る構成である。
また、走行部には、走行車体15に対し左右一対の後輪3、3を上下動させて、走行車体15の姿勢及び車高を制御する機体制御機構50が設けられている。
機体制御機構50には、左右一対の後輪3の走行伝動ケース60と走行車体15との間において、後輪3の上げ下げによって走行車体15を昇降する油圧昇降シリンダ10と、走行車体15を左右傾斜させる水平用油圧シリンダ14とが設けられており、この油圧昇降シリンダ10を伸縮作動させると、左右一対の後輪3が同方向に同量だけ走行車体15に対し上下動し、走行車体15が昇降する。
即ち、本実施の形態の苗移植機1では、図1、図2に示す通り、左右一対の後輪3側に駆動力を出力する為のミッション出力軸4aがミッションケース4の左右外側に向けて突出して設けられている。更に、走行伝動ケース60の入力軸61が、ミッション出力軸4aとスプライン結合により連結されている。また、走行伝動ケース60からミッションケース4側に突き出した左右の回動外筒部63の外周の上面側には、入力軸61と直交方向に延びたスイングアーム63aがそれぞれ固着されている(図1、図2参照)。そして、走行伝動ケース60は、左右の回動外筒部63を介して、ミッションケース4に対して入力軸61を中心として回動可能に連結されている。
また、油圧昇降シリンダ10のピストンロッドの先端部にはロッド連結板9が取り付けられており、ロッド連結板9の左右両端部と、左右のスイングアーム63aとが、連結ロッド9aを介して連結されている。
また、左側の連結ロッド9aとスイングアーム63aの間には、水平用油圧シリンダ14が組み込まれている。
また、油圧昇降シリンダ10は、ミッションケース4の上部に取り付けられた油圧切替バルブ部40(図1参照)に固着して設けられ、ミッションケース4に取り付けられた油圧ポンプからの油圧を切り替える油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)を操作することにより作動する構成である。
尚、昇降操作バルブには、後述する昇降操作レバー81(図13参照)がケーブル82を介して連結されるとともに、後述するカウンタアーム760(図14参照)がロッド765を介して連結されている。
また、ミッションケース4の右側には振り子式の左右傾斜センサ41が設けられており、この左右傾斜センサ41の検出により油圧切替バルブ部40に備えられた水平操作バルブ(図示省略)を介して水平用油圧シリンダ14を作動させ、左側の後輪3のみを上下動させて、畝Uの谷部の凹凸に関係なく走行車体15を左右水平に維持すべく構成されている。
ここで、植付具11について、図3(a)〜図3(c)を用いて説明する。
図3(a)は、植付具11の中央部を機体前後方向に平行で且つ地面に対して垂直な平面で切断してそれを左側から見た概略断面図であり、図3(b)は、植付具11の中央部を機体左右方向に平行で且つ地面に垂直な平面で切断してそれを背面側から見た概略断面図であり、図3(c)は、植付具11の内側の後面に沿って配置される後ガード1210Bを左後方から見た斜視図である。
図3(a)、図3(b)に示す通り、植付具11は、苗を一時的に保持し圃場に植え付ける、左右一対の左側ホッパー部1011L及び右側ホッパー部1011Rと、左側ホッパー部1011L及び右側ホッパー部1011Rの上端部を保持すると共に、左側ホッパー部1011L及び右側ホッパー部1011Rの先端側を開閉するべく互いに離合可能に連結された左ホッパーホルダー1012L及び右ホッパーホルダー1012Rと、左ホッパーホルダー1012L及び右ホッパーホルダー1012Rを支点軸1013aを中心に回動可能に保持するホルダー保持枠1013と、左ホッパーホルダー1012L及び右ホッパーホルダー1012Rの前側下端部に一端と他端が固定されて、左側ホッパー部1011L及び右側ホッパー部1011Rが閉じる方向の圧縮力を常時付勢するホッパー引っ張りスプリング1014と、左ホッパーホルダー1012L及び右ホッパーホルダー1012Rの前側上端部に固定され、開閉用連結ケーブル350の他端部352が連結された左右一対の開閉アーム1015L及び1015Rと、を備えている。
ここで、左ホッパーホルダー1012Lの連結部1012Laと、右ホッパーホルダー1012Rの連結部1012Raは、ギヤ形状であり、そのギア形状は前後で半歯ずれており、対向して左右に組み付けることで、ギアを噛み合わせる構成である。具体的には、右ホッパーホルダー1012Rに固定されている、開閉用連結ケーブル350の他端部352が連結された右側の開閉アーム1015Rが、開閉用連結ケーブル350により引っ張られると、右ホッパーホルダー1012Rの連結部1012Raは支点軸1013aを中心にして右側ホッパー部1011Rが開く方向に回動する。それと同時に、右ホッパーホルダー1012Rの連結部1012Raとのギアの噛み合わせにより、左ホッパーホルダー1012Lの連結部1012Laが連動して回動することで、左側ホッパー部1011Lが開く方向に同時に回動する。
また、左右一対のホッパー部1011L、1011Rは、閉じた状態で下端部が嘴状に尖っており、上端部が開放された略円筒形状を成している。
そして、左側ホッパー部1011Lと右側ホッパー部1011Rとが互いに突き合わされる前側と後側の端面部において、正面視で略V字状の前V字切り欠き部1200Fと、背面視で略V字状の後V字切り欠き部1200Bが設けられている。
前V字切り欠き部1200Fと後V字切り欠き部1200Bを設けたことにより、植付具11が閉じた時、左側ホッパー部1011Lと右側ホッパー部1011Rの合わせ面の接触部が小さくなるので、合わせ面が当たることで発生する騒音が低減出来る。
また、本実施の形態の植付具11では、前V字切り欠き部1200Fを内側から覆う前ガード1210Fと、後V字切り欠き部1200Bを内側から覆う後ガード1210Bとを備えている。
前ガード1210Fは、ホルダー保持枠1013の前側立ち上がり部1013Fに上端部1210Faが固定され、そこから側面視で(図3(a)参照)、植付具11の内側中心に向けて斜め下方に伸びた平板部が前V字切り欠き部1200Fを、背面視で(図3(b)参照)概ね覆うべく構成されている。
また、後ガード1210Bは、ホルダー保持枠1013の左側枠部1013Lの後端側及び右側枠部1013Rの後端側に、左側上端部1210BL及び右側上端部1210BRが固定され、そこから側面視で(図3(a)参照)、植付具11の内側中心に向けて斜め下方に伸びた平板部が後V字切り欠き部1200Bを、前ガード1210Fと同様に概ね覆うべく構成されている。
また、後ガード1210Bの平板部の上端縁部1210BUは(図3(c)参照)、ホルダー保持枠1013に固定された状態において、左右一対のホッパー部の後側上端縁部1011BU(図3(a)参照)と同じ高さになる様に構成されている。即ち、後ガード1210Bの上端縁部1210BUは、背面視で、後ガード1210Bの左右上端部1210BL、1210BRの高さよりも低く構成されている。
尚、前ガード1210F及び後ガード1210Bは、弾性を有する樹脂製若しくはゴム製の板状部材である。
前ガード1210F及び後ガード1210Bを設けたことにより、取出装置200が苗22を植付具11に供給する際に、前V字切り欠き部1200Fや後V字切り欠き部1200Bから苗22を植付具11の外へ落としたり、前V字切り欠き部1200Fや後V字切り欠き部1200Bに苗22が引っ掛かることを防止出来、苗の移植精度が向上する。
また、後ガード1210Bの上端縁部1210BUが、左右一対のホッパー部の後側上端縁部1011BU(図3(a)参照)と同じ高さ若しくはそれ以下の高さにする為に、上端縁部1210BUの高さを、背面視で、後ガード1210Bの左右上端部1210BL、1210BRの高さよりも低く構成されていることにより、取出装置200が苗22を植付具11に供給する際に、苗22の一部が後ガード1210Bの上端縁部1210BUと接触することが防止出来、苗22に傷を付けずに且つ正確にホッパー内に供給出来る。
次に、主として図4を参照しながら、上述した取出部材260、植付具11、トレイ供給装置100、及びトレイ送りロッド121の動作タイミングについて説明する。
図4は、取出部材260の動作、植付具11の動作、及びトレイ供給装置100の苗置台110の横送り動作の動作タイミングを示すと共に、取出部材260の動作、植付具11の動作、及びトレイ供給装置100のトレイ送りロッド121の縦送り動作の動作タイミングを示す図である。
尚、縦送り動作は、苗置台110が左右方向の最端部に移動して、最後の育苗ポット21の苗22が抜き取られたときに、実行される動作である。
図4の横軸は、各種駆動アームの水平方向からの回動角度を基準としている。例えば、取出部材260の場合は駆動アーム220(図7参照)の回動角度を、植付具11の場合は上下動アーム320(図10参照)の回動角度を、トレイ供給装置100による縦送りの場合は縦送り駆動アーム150(図6参照)の回動角度をそれぞれ基準としている。
図4に示す通り、取出爪の動作タイミング2210によれば、本実施の形態の苗移植機1は、タイミングP2において、取出部材260が育苗ポット21の内部から苗22を掴んだまま抜け出して、タイミングP3の手前でその苗22の植付具11への放出を開始し、タイミングP3において、苗22の放出を終了して、その後、タイミングP4において、隣接する育苗ポット21の内部に突入して苗22を掴んだ後、育苗ポット21の内部から抜け出すべく構成されている(図4のタイミングP2参照)。
また、図4に示す通り、植付具の動作タイミング2220によれば、本実施の形態の苗移植機1は、上死点から少し下がったタイミングP3において、植付具11は下降動作を停止し、その後、タイミングP4において下死点に達するべく構成されている。
ここで、植付具11が下降動作を停止するタイミングP3では、取出部材260の動作、トレイ供給装置100の横送り動作(即ち、苗置台110の動作)及び縦送り動作(即ち、トレイ送りロッド121の動作)を含む植付動作に関する動作が同時に停止され、これにより、植付動作を間欠的に行えて、植付株間の調整を可能とする構成である。尚、これら動作の停止期間は、所望の植付株間に応じて、0秒から所定の期間まで操作部600(図13参照)により設定可能に構成されている。
植付動作を間欠的に実現する構成は、苗植付装置駆動機構400における植付クラッチ420や間欠用カム441やソレノイド1440等により実現するが、これについては、図11等を用いて更に後述する。
また、図4に示す通り、トレイ供給装置100の苗置台110における横送り動作の動作タイミング2230によれば、本実施の形態の苗移植機1は、取出部材260が育苗ポット21の内部に突入している間、即ち、タイミングP4以降P2までの間は、育苗ポット21一つ分の横送り動作は停止しており、植付具11の植付動作が停止しているタイミングP3では、育苗ポット21一つ分の横送り動作の途中において横送り動作も同時に停止する構成である。
また、図4に示す通り、トレイ供給装置100のトレイ送りロッド121における縦送り動作の動作タイミング2240によれば、本実施の形態の苗移植機1は、上述した、トレイ送りロッド121が側面視で略四角形の軌跡A(図6参照)を描いて回動する動作において、トレイ20の裏面側の隣接する育苗ポット21間の隙間21a(図6参照)からトレイ送りロッド121の先端部が抜け出して(図6の矢印121a1参照)、上方に移動して(図6の矢印121a2参照)、再び次の育苗ポット21間の隙間21b(図6参照)に進入する(図6の矢印121a3参照)までの戻り動作は、取出部材260が育苗ポット21の内部に突入した後に開始されて、取出部材260が育苗ポット21の内部から抜け出す(図4のタイミングP2参照)直前に完了して、タイミングP2において縦送り動作を開始し、タイミングP3において縦送り動作を完了する構成である。
尚、図4では、理解の促進の為に、上述したトレイ供給装置100のトレイ送りロッド121における縦送り動作の動作タイミング2240と同じ内容を、動作タイミング2250により、トレイ送りロッド121が、育苗ポット21間の溝部に入っているか、抜け出しているかという観点から示している。
以上の構成により、トレイ送りロッド121の戻り動作中において(図4のタイミングP1からP2参照)、取出部材260が育苗ポット21の内部に突入しているので、トレイ20は取出部材260により押さえつけられており、トレイ20がトレイ搬送路111上を下方にずれることを防止出来る。
また、以上の構成により、間欠植付により植付具11の植付動作が停止するときは、トレイ送りロッド121によるトレイ20の縦送り動作が完了しているので(図4のタイミングP3参照)、間欠植付における停止状態でトレイ送りロッド121がトレイ20を確実に保持出来、トレイ20がトレイ搬送路111上を下方にずれることを防止出来る。
即ち、間欠植付の停止状態では、上述した通り、植付動作に関連する部材は同時に停止するので、機体の走行による振動等でトレイ20のずれが生じ易いが、本実施の形態では、トレイ送りロッド121によるトレイ20の縦送り動作が完了しており、トレイ送りロッド121は、隣接する育苗ポット21間の隙間21a(図6参照)に入ったままの状態で停止していることにより、トレイ送りロッド121がトレイ20を確実に保持出来るのである。
また、以上の構成により、取出部材260が育苗ポット21の内部に突入している間は、トレイ搬送路移動装置170によるトレイ供給装置100の苗置台110の横送り動作をさせず、且つ、間欠植付動作により植付具11の植付動作が停止するときは(図4のタイミングP3参照)、トレイ搬送路移動装置170によるトレイ供給装置100の苗置台110の、育苗ポット21一つ分の横送り動作の途中であるので、トレイ20の育苗ポット21一つ分の横送りを、苗取出動作の支障にならないタイミングで、且つ、余裕をもってゆっくりと作動させることが出来、横送りの精度が向上する。
また、本実施の形態では、トレイ送りロッド121が戻り動作をしている間は、トレイ搬送路移動装置170によるトレイ供給装置100の苗置台110の横送り動作をさせない構成とした。これは、次の横一列の育苗ポット21を下方に移動させるべくトレイ送りロッド121が戻り動作をしている間に、もし、横送り動作(この場合、苗置台110は一番端まで移動しているので、横送り方向は逆方向となる)をさせることになると、トレイ送りロッド121が戻り動作をしている間のトレイ20の保持が安定しないときに、横送り動作することになり、トレイ搬送路移動装置170によるトレイ供給装置100の横送り動作で、トレイ20がずれるおそれがあるからである。これにより、本実施の形態では、トレイ搬送路移動装置170によるトレイ供給装置100の横送り動作で、トレイ20がずれることを防止出来る。
また、本実施の形態の苗移植機1によれば、トレイ20がずれにくく安定した縦送りを実現出来ると共に、従来とは異なる縦送り機構を含むトレイ供給装置100を提供出来るので、トレイ供給装置の設計の自由度が拡大する。
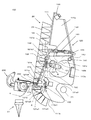
次に、主として図5(a)、図5(b)、図6を用いて、上述したトレイ供給装置100について更に説明する。
図5(a)は、トレイ供給装置100の斜視図であり、図5(b)は、図5(a)のX部の拡大斜視図である。図6は、トレイ供給装置100のトレイ縦送り装置120の構成を示す概略側面図である。
トレイ20は、複数の育苗ポット21を縦横に連設したもので、プラスチックで形成されていて、可撓性を保持する構成になっている。各育苗ポット21は表面側で連結し、裏面は独立した形態となっている。
トレイ供給装置100は、トレイ20の底部を支持する前下がりに傾斜したトレイ搬送路111を有する苗置台110と、トレイ20をトレイ搬送路111に沿って縦方向に間欠的に送るトレイ縦送り装置120と、トレイ搬送路111を有する苗置台110を左右方向に移動させるトレイ搬送路移動装置170(図2参照)とを備える。
また、上述した通り、トレイ供給装置100には、トレイ搬送路111上にトレイ20が載置されていないことを検知するためのトレイ検知装置1100が設けられている。
ここでは、本実施の形態の苗移植機1の特徴の一つであるトレイ検知装置1100の構成、及び動作について、図2、図5を用いて説明する。
即ち、トレイ検知装置1100は、図2、図5に示す通り、トレイ搬送路111の略中央部に回動可能に配置されたトレイ検知部材1110と、苗置台110の左右両側の外側面にそれぞれ配置されてトレイ検知部材1110の回動と連動して回動する左右一対の連動アーム1120L、1120Rと、トレイ検知部材1110と左右一対の連動アーム1120L、1120Rとを連結する連結シャフト1130と、トレイ搬送路移動装置170の左右両側部172L、172Rの内側面において、左右一対の連動アーム1120L、1120Rに対応する位置にそれぞれ配置された左右一対のリミッタスイッチ1140L、1140Rを有している。左右一対のリミッタスイッチ1140L、114Rの信号ライン(図示省略)は、制御部800(図15参照)に繋がっている。
そして、トレイ搬送路111の上にトレイ20が供給されていないときや、トレイ20の後端部がトレイ検知部材1110の位置を通過しているときは、トレイ検知部材1110は、バネ部材(図示省略)の復元力によりトレイ搬送路111の略中央部から表側に向けて突き出しているが、トレイ搬送路111の上にトレイ20が供給されているときは、トレイ20の裏面が当該バネ部材の復元力に対抗する力でトレイ検知部材1110を押さえつけるので、左側面視で、トレイ検知部材1110は反時計回りに回動する。
これにより、トレイ20の有無に合わせて、トレイ検知部材1110が時計回り又は反時計回りに回動し、それに連動して、左右一対の連動アーム1120L、1120Rが回動する。
トレイ搬送路111上の中央部にトレイ20が存在しない状態では、トレイ検知部材1110は、左側面視で、時計回りに回動してトレイ搬送路111の略中央部の開口部から表側に向けて突き出すと共に、左右一対の連動アーム1120L、1120Rはこれと連動して時計回りに回動して所定位置で停止している。そして、苗置台110が、横送りされてトレイ搬送路移動装置170の左右両側部172L、172Rの何れかの内側面に到達すると、左右一対の連動アーム1120L又は1120Rが、左右一対のリミッタスイッチ1140L又は1140Rの可動部1141L又は1141Rに当たり、それにより、トレイ搬送路111の上の略中央部にトレイ20が存在しない旨を示す信号が、制御部800に対して送られる。当該信号を受けた制御部800は、操作部600(図13参照)に配置された警報ブザー(図示省略)を鳴らす。
警報ブザーは、左右一対のリミッタスイッチ1140L又は1140Rの可動部1141L又は1141Rが押された後、一定時間(数秒間)鳴り、その後、自動的に警報ブザーの警報音は停止する構成である。
また、当該一定時間を、苗置台110が端から端まで移動する時間以上に設定し、且つ、左右一対のリミッタスイッチ1140L又は1140Rの可動部1141L又は1141Rが押される度に、その一定時間のカウントがリセットされて、新たに押されたリミッタスイッチ1140L又は1140Rからの信号を受けて、一定時間のカウントを新たに開始する構成とすることで、トレイ20が供給されるまで、警報音が停止することなく連続して鳴る構成とすることが出来る。
上述した通り、左右一対のリミッタスイッチ1140L、1140Rが、左右に移動しない固定部分であるトレイ搬送路移動装置170の左右両側部172L、172Rに取り付けられているので、左右一対のリミッタスイッチ1140L、1140Rから伸びる信号配線(図示省略)を確実に固定することが出来、断線などが防止出来る。
また、警報ブザーは警報音を一定時間発すると自動的に音が止まるので、停止スイッチも設ける必要がない。
上記実施の形態では、警報ブザーが一定時間鳴る構成について説明したが、これに限らず例えば、トレイ検知装置1100がトレイ20の不存在を検知すると、ソレノイド1440と連動して、トレイ20の横一列に配列された育苗ポット21の個数に合わせて例えば10回、警報ブザーが鳴る構成としても良い。
また、上記実施の形態では、警報ブザーが一定時間鳴る構成について説明したが、これに限らず例えば、トレイ検知装置1100が2回連続してトレイ20の不存在を検知すると、連続して数秒間警報ブザーが鳴る構成としても良いし、或いは、トレイ20の不存在を検知する度に、ソレノイド1440と連動して、警報ブザーの鳴る長さが長くなる構成としても良い。
上記構成によれば、苗の残量が警報ブザーの音で分かるため、余裕をもってトレイ20を入れ替えられる。
また、上記構成によれば、ソレノイド1440の作動に連動した間欠植付動作の度に警報が作動することにより苗減少度合いや苗残量度合いが判断できるという効果を奏する。
ここで、再び、トレイ供給装置100のトレイ縦送り装置120の説明に戻る。
トレイ縦送り装置120は、トレイ20の裏面側から、当該裏面側に突き出した育苗ポット21同士の間に入り、下方に移動することでトレイ20を育苗ポット21の横一列分だけ送り、その後、育苗ポット21同士の間から抜け出して、育苗ポット21の横一列分だけ上方に移動する構成のトレイ送りロッド121を有している。トレイ送りロッド121は、中央部121aがトレイ搬送路111の下部に設けられた退避溝111aに出入り可能に構成され、両端部121bは直角に折り曲げられて、トレイ搬送路111の両サイドより外側に位置しており、トレイ20がトレイ搬送路111上を移動する際に、邪魔にならない構成である。
更に、トレイ供給装置100は、退避溝111aの下流側であってトレイ搬送路111の両サイドの端面部において、トレイ送りロッド121の動きを規制するための左右一対のロッドガイドプレート112を備えている。このロッドガイドプレート112の上端縁部には、トレイ送りロッド121の中央部121aの両端で下流側に突き出した突起部121abが進入可能な切り欠き部112aが形成されている(図5(b)参照)。
即ち、この切り欠き部112aは、トレイ送りロッド121の中央部121aが、下方に移動した後、育苗ポット21同士の間から抜け出すまでの間において、一時的にトレイ送りロッド121の中央部121aの両端の突起部121abを保持して、育苗ポット21に入れられている苗22の重みでトレイ20が下方へずれ動くことを規制する構成である。尚、トレイ送りロッド121の中央部121aの軌跡については、図6を用いて後述する。
また、トレイ搬送路移動装置170は、トレイ搬送路111の裏面側に設けられ、苗移植機1の本体側から駆動力を得て、トレイ搬送路111を有する苗置台110を左右方向に移動させるリードカム軸171と、リードカム軸171より上方に設けられ、トレイ搬送路111を有する苗置台110の左右方向への移動を案内する案内レール155と、案内レール155を左右両側で保持する左右両側部172L、172Rを有している。
また、トレイ搬送路111は、リードカム軸171と、トレイ搬送路111の内側上部に設けられた左右移動を案内する案内レール155により支持されている。これにより、案内レール155はリードカム軸171と離れた位置でトレイ搬送路111を支えるため、左右方向への移動時にがたつきが少ない。
トレイ搬送路111と押え枠25との間に挟み込むようにしてトレイ20を苗載台110の上方から差し込むと、トレイ20の裏面側の溝部にトレイ送りロッド121の先端部が係合した状態となり、この状態でトレイ送りロッド121が側面視で略四角形の軌跡Aを描いて回動することにより、トレイ20がトレイ搬送路111に沿って斜め下方に間欠的に縦送りされる構成である。
尚、トレイ送りロッド121を用いて、トレイ20の縦送りを間欠的に行う機構については、更に後述する。
また、本実施の形態では、トレイ20がトレイ搬送路111に沿って斜め下方に順次縦送りされて苗22が取出部材260により全て取り出された後、トレイ縦送り装置120の下方を通り、最終的に操作部600の上方を通過して操縦ハンドル8の方向に排出される構成であり(図1の排出経路20t参照)、この点について説明する。
即ち、図1、図2に示す通り、トレイ20が排出される排出経路20tの先には主クラッチレバー900が配置されており、主クラッチレバー900を前方側に操作すると主クラッチが「入」状態となり、後方側に操作すると(図1の矢印900B参照)主クラッチが「切」状態となる。
操縦ハンドル8の方向に排出されてきたトレイ20は、通常は、作業者により取り除かれるが、作業者が排出されてきたトレイ20の取り除き作業を怠った場合でも、本実施の形態では、排出されてきたトレイ20の先端部により主クラッチレバー900が後方側に押されることにより(図1の矢印900B参照)「切」状態となり、安全のために、植付作業が自動的に停止する構成である。
ところで、取出装置200は、苗置台110の下端部に対向する位置に配置されており、取出部材260の先端が軌跡Kを描く様に作動して、横方向に移動する育苗ポット21から、順次、苗22を取り出して植付具11に供給する構成である。
次に、主として図7(a)、図7(b)、図8を用いて、本実施の形態の苗移植機1に設けられた取出装置200の構成を中心に説明する。
図7(a)は、取出装置200の概略斜視図であり、図7(b)は、図7(a)に示す押出ロッド281の変形例である。また、図8は、図7(a)の紙面の左上奥側から右下手前側を見た、取出装置200の概略側面図である。
図7(a)、図8に示す通り、取出装置200は、苗移植機1の本体に固定された取出装置固定部材201に回動可能に保持されて、チェーンベルト202を介して本体側の駆動源の動力で矢印B方向に回動する駆動軸203により同方向に回動する駆動アーム220と、駆動アーム220の先端側部220aに、一端部230aが回動自在に連結された連結アーム230と、取出装置固定部材201に固定ピン201a、201bによって保持され、外形が略アルファベットのJ文字の形状を呈した板状部材であって、トレイ供給装置100に近い側が直線状であり遠い側が略R状に立ち上がった形状を呈した案内溝241を有する案内部240と、を備えている。
また、取出装置200は、案内溝241に対してがたつくことなく且つスムーズにスライド移動可能に挿入された、後述するカム軸271と一体である第1の被案内部材245と、第2の被案内部材247とが連結され、それら被案内部材が連結された側面の一端側から突き出して略直角に折り曲げられた折り曲げ部251を有する基板250と、基板250の折り曲げ部251から垂直に突き出して、回動自在に保持された左右一対の取出爪保持ピン252L、252R、根元部がそれぞれ左右一対の取出爪保持ピン252L、252Rに取付られ、先端部の幅がピンセット状に細くなっている、育苗ポット21内の苗22を取り出す一対の取出爪261L、261Rと、一対の取出爪261L、261Rの対向する内面部の根元部側にその両端が取り付けられた引っ張りバネ263とを有する取出部材260と、を備えている。
また、取出装置200は、基板250に回動自在に貫通した、上記第1の被案内部材254と一体であるカム軸271を有したカム270であって、そのカム270の外周部の厚みに関して、上記一対の取出爪261L、261Rの内面部に設けられた左右一対の爪先端幅規制突起262L、262Rの先端面と接触する際、その外周部の場所によって厚みが変化している外周部272と、そのカム270の最外縁部のカム軸271の軸中心からの距離(外径ともいう)に関して、その最外縁部の場所によってその外径が変化している最外縁部273とを備えたカム270と、基板250に回動自在に連結され、カム270の最外縁部273の外径の変化により、一対の取出爪261L、261Rに沿って、育苗ポット21から取り出して一対の取出爪261L、261Rで保持されている苗22を押し出す押出ロッド281を有する押出機構280と、を備えている。
本実施の形態の取出装置200の特徴の一つは、取出部材260が育苗ポット21内の苗22を取り出した後、押出ロッド281が苗22を押し出す方向に少し移動し、その後、押出ロッド281が苗22を植付具11へ供給するときに、押出ロッド281が、苗22を押し出す方向に、更に移動するべく構成されている点である。これにより、押出ロッド281を苗22の床部に接触させることができるので、取出部材260と押出ロッド281とで苗22を安定して保持でき、植付精度の向上が図れる。
この構成については、図8、図9を用いて更に後述する。
尚、本実施の形態の取出部材260は、本発明の取出具の一例にあたり、本実施の形態の押出ロッド281は、本発明の押出具の一例にあたる。
また、カム軸271と一体である第1の被案内部材245の先端近傍縁部245aは、連結アーム230の他端部230bに回動可能に連結されている。また、カム軸271と一体である第1の被案内部材245は、駆動アーム220の回転力によって、第1ギヤ291、第2ギヤ292、第3ギヤ293から構成された伝達機構290を介して回動させられ、駆動アーム220の駆動周期に合わせてカム軸271へ駆動力を伝達する構成である。
また、カム270の外周部272が、一対の取出爪261L、261Rの内面側に設けられた左右一対の爪先端幅規制突起262L、262Rの先端面と接触する際、カム270の外周部272の厚みの変化と、引っ張りバネ263の復元力との相互作用により、一対の取出爪261L、261Rを開閉させる構成である。
次に、上記伝達機構290について更に説明する。
即ち、第1ギア291は、駆動アーム220の先端側部220aに固定されており、連結アーム230に対しては、第1回動軸291aを介して回動自在に取り付けられている。また、第3ギヤ293は、カム軸271と一体である第1の被案内部材245の先端部245bに固定されており、第1の被案内部材245の先端近傍縁部245aが、連結アーム230の他端部230bに回動可能に連結されているため、第3ギヤ293は、連結アーム230に対して回動自在に保持されている。従って、第3ギア293は、第1の被案内部材245と一体で回動する。また、第2ギア292は、連結アーム230の中央位置において回動自在に取り付けられており、第1ギヤ291及び第3ギヤ293の両方に挟まれて、双方のギヤと嵌合している。
次に、上記押出機構280について、図7(a)〜図8を参照しながら更に説明する。
押出機構280は、一対の取出爪261L、261Rで保持されている苗22を押し出す、先端部281aが直角に折り曲げられた押出端面部281Sに、取出爪261L、261Rの先端部の幅に合わせた切欠部281bが形成された押出ロッド281(図7(a)参照)と、押出ロッド281の押出端面部281S側から見て、略直角状に折り曲げられた連結棒282であって、その一方の先端部282aが押出ロッド281の後端部に設けられた後端孔部281cに回動自在に挿入されて、抜け防止のワリピン(図示省略)で保持された連結棒282と、連結棒282の他方の先端部282bが上端部283aに固定され、下端部283bが基板250に対して押出アーム連結軸283dにより回動自在に取付られ、中央部の引っ張りバネ保持用第1突起283cが設けられた押出アーム283と、一端が引っ張りバネ保持用第1突起283cに引っ掛けられ、他端が基板250に固定された引っ張りバネ保持用第2突起250aに引っ掛けられた押出アーム引っ張りバネ284と、を備えている。
そして、カム270が矢印B方向に回動した際、最外縁部273の内で外径が最も大きい部分を有する最大突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図8において反時計方向に回動さられて(矢印C参照)、連結棒282で連結された押出ロッド281が後退する構成である。
また、カム270が矢印B方向に更に回動すると、最外縁部273の内で、最大突出部273bの最大径より外径が小さく、且つ、最外縁部273の内で外径が最も小さい最小突出部273aより外径が大きい中間突出部273cにおける接触位置273c1(図8参照)が、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触する構成である。
このとき、それまで引き延ばされていた押出アーム引っ張りバネ284が少し縮まり、押出アーム283は、図8において時計方向に回動さられて(矢印D参照)、連結棒282で連結された押出ロッド281が少し突き出てきて、押出端面部281Sが苗22に接触する構成である。
また、カム270が矢印B方向に更に回動すると、最外縁部273の内で外径が最も小さい最小突出部273aにおける押出位置273a1(図8参照)が、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触する構成である。
これにより、押出アーム引っ張りバネ284が更に縮まり、押出アーム283は、図8において時計方向に回動さられて(矢印D参照)、連結棒282で連結された押出ロッド281が更に突き出てきて、苗22を植付具11側に完全に放出する構成である。
押出ロッド281が突き出してくる度に、押出ロッド281の先端部281aに設けられた切欠部281bを、一対の取出爪261L、261Rの先端部が通過することになるので、その先端部に付着していた土等が取り除かれる構成である。
また、押出ロッド281は、図7(a)に示す通り、中央の平坦部281Cの幅方向における左右両端に、立ち上がり部281L、281Rが形成されている。
この立ち上がり部281L、281Rにより、育苗ポット21から苗22を取り出す際に、当該苗22の葉を両側から覆うことが可能となるため、隣の育苗ポット21の苗とからむのを防止出来る。
また、押出ロッド281は、平坦部281Cとその両端の立ち上がり部281L、281Rにより、苗22の葉を下面及び両側面から覆うので、一対の取出爪261L、261Rに、からむのを防止出来る。
また、育苗ポット21から苗22を取り出した後、当該苗22の葉が、立ち上がり部281L、281Rが左右の立ち上がり部281Lと281Rとの間に収まっているため、苗22を放出する位置まで安定して運ぶことが出来る。
尚、押出ロッド281は、図7(a)に示した構成に限らず例えば、図7(b)に示す構成であっても良い。
即ち、図7(b)に示す第2の押出ロッド1281は、図7(b)に示す通り、中央の平坦部281Cの幅方向における左右両端に、第2立ち上がり部1281L、1281Rが形成されている。当該第2立ち上がり部1281L、1281Rの先端側の端面部1281La、1281Raが、押出端面部281Sと同一の平面1280上に位置するべく構成されていても良い。
これにより、取出部材260が育苗ポット21内の苗22を取り出した後、苗22の全体を、押出端面部281Sと、第2立ち上がり部1281L、1281Rの先端側の端面部1281La、1281Raとで押し出せるため、苗22の押出、及び放出が安定する。
以上の構成において、次に、図7〜図9を参照しながら、取出装置200の動作を説明する。
上述した通り、案内部240は、苗移植機1の本体に固定された取出装置固定部材201にしっかりと固定されているため動かない。
駆動アーム220の回動に伴って、連結アーム230が揺動するが、その動きは、案内部240に形成された案内溝241を貫通して基板250に連結されている第1の被案内部材245により規制される。
一方、連結アーム230の動きに伴って、基板250も揺動するが、基板250は、第1の被案内部材245の他に、第2の被案内部材247が、案内溝241を貫通している為(但し、第2の被案内部材247は連結アーム230には連結されていない)、その動きは、案内溝241に沿った往復移動を繰り返す。基板250には、取出部材260が取り付けられている為、取出部材260も基板250と同様の動きをし、一対の取出爪261L、261Rの先端部261Lp、261Rpは、図8、図9に示す軌跡Kを描く。
ここで、図9は、駆動アーム220の回動の位置と、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置との概略の対応関係を示す模式図である。図9に示す、駆動アーム220の回動の位置P1〜P6は、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置K1〜K6に対応する。尚、軌跡Kを示す破線上に記載した矢印は、動作方向を示している。
図9に示す通り、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K1から位置K2に向かう動作は、育苗ポット21から苗22を抜き取る動作に対応している。位置K1から位置K2までの軌跡Kが直線状になっていることから、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21から真っ直ぐに後退する。この時、一対の取出爪261L、261Rの先端部261Lp、261Rpには、引っ張りバネ263の復元力により、互いに近づく方向の力が作用しており、育苗ポット21から抜き取った苗22を保持することが出来る。尚、一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作については、押出ロッド281の動作と合わせて、更に後述する。
尚、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K6から位置K1に向かう動作は、苗取出位置にあるトレイ20の育苗ポット21内の苗22に対して、一対の取出爪261L、261Rを挿入させる動作に対応しており、位置K1から位置K2に向かう軌跡Kとほぼ同じ経路を逆向きに移動するので、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21にほぼ真っ直ぐに挿入される。この時、一対の取出爪261L、261Rの先端部261Lp、261Rpには、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用しており、双方の先端部が開いた状態で、育苗ポット21に進入出来る。
これにより、一対の取出爪261L、261Rの先端部261Lp、261Rpが、トレイ20、育苗ポット21、及び苗自体を傷付けることが無い。
尚、位置K1から位置K2までの軌跡K、及び、位置K6から位置K1までの軌跡Kが、概ね直線状になっているのは、案内溝241のトレイ供給装置100に近い側が直線状に形成されている為である。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが位置K2から位置K3に向かうに従って、一対の取出爪261L、261Rの先端部261Lp、261Rpは、それまで育苗ポット21に対向していた姿勢から略下方に向けて急激に姿勢を変化させ、位置K4まで移動した時には、先端部261Lp、261Rpは、ほぼ真下を向いている。
また、一対の取出爪261L、261Rの先端部261Lp、261Rpが位置K3から位置K4に向かう間において、中間突出部273cにおける接触位置273c1(図8参照)が、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触する。これにより、押出ロッド281が、押出位置273a1の手前で少し突き出されて、押出端面部281Sが苗22に接触する。
尚、この様に、略下方に向けて急激に姿勢を変化させるのは、案内溝241のトレイ供給装置100から遠い側が、略R状に立ち上がった形状に形成されている為である。
そして、丁度その時、その先端部261Lp、261Rpの下方には、上死点に向けて軌跡T1(図1参照)上の上昇工程にある植付具11の苗投入口(図示省略)が上方に向いており、位置K4から位置K5の間において、押出位置273a1(図8参照)が、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触する。
これにより、押出ロッド281が完全に突き出されて、押出ロッド281の押出端面部281Sにより一対の取出爪261L、261Rの先端部261Lp、261Rpから押し出された苗22が、植付具11へ供給される。尚、押出ロッド281の動作については、更に後述する。
次に、位置K5から位置K6に向かうに従って、一対の取出爪261L、261Rの先端部261Lp、261Rpは、それまで略下方に向けていた姿勢を次の育苗ポット21に対向出来る様に急激に姿勢を変化させて、位置K1まで移動した時には、先端部261Lp、261Rpは、新たな育苗ポット21に挿入されている。
図9に示す、駆動アーム220の回動の位置と、一対の取出爪261L、261Rの先端部261Lp、261Rpの軌跡K上の位置との概略の対応関係から分かる様に、位置K4から位置K5に向かう動作は、上述した位置K1から位置K2に向かう動作に比べてゆっくり行われるので、育苗ポット21からの苗22の取出は素早く行えて、且つ植付具11への苗22の放出を確実に行える。
この様な動作が行われるのは、連結アーム230が、駆動アーム220より前方(トレイ供給装置100の抜き取り位置)側に設けられているためである。また、駆動アーム220が、連結アーム230に比べて、トレイ供給装置100の抜き取り位置から遠い為、苗22を取り出す時に苗22に接触することが無く、邪魔にならない。
次に、主として図7〜図9を参照しながら伝達機構290と押出機構280の動作を中心に説明する。
図7に示す通り、駆動アーム220のB方向への回動により、駆動アーム220の先端側部220aに固定された第1ギヤ291は、駆動アーム220の回動支点220bを中心としてB方向へ公転する。第1ギア291は、連結アーム230に対して第1回動軸291aを介して回動自在に取り付けられており、第2ギヤ292を介して、第3ギヤ293をB方向に回動させる。第3ギヤ293は、カム軸271と一体である第1の被案内部材245の先端部245bと固定されており、且つ、第1の被案内部材245の先端近傍縁部245aが、連結アーム230の他端部230bに回動可能に連結されているため、第3ギヤ293の回動により、カム軸271を介して、カム270がB方向に回動する。
即ち、駆動アーム220の駆動周期に合わせてカム270が回動する。
カム270は、場所によって厚みが変化している外周部272と、場所によってカム軸271の軸中心からの距離(外径)が変化している最外縁部273を有しており、図8に示す通り、最外縁部273の内で最大突出部273bは、最小突出部273aより外径が大きく、カム軸271の軸中心から同じ距離にある外周部272の内で第1の範囲272aの厚みは、残りの肉厚部分である第2の範囲272bの厚みに比べて薄く設定されている。
以上の構成のもとで、駆動アーム220の駆動周期に同期してカム270が回動する際、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K6から位置K1に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、カム270の外周部272の内、肉厚部分である第2の範囲272bが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用しており、双方の先端部が開いた状態である。
一方、この時、カム270の最外縁部273の内、最大突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触していることにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図8において反時計方向に回動して(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態を維持する。
よって、一対の取出爪261L、261Rの先端部261Lp、261Rpは、育苗ポット21に進入して、苗を取り出すことが出来る。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K1から位置K2に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、位置K1から位置K2に向かう動作を開始すると同時に、カム270の外周部272の内、肉薄部分である第1の範囲272aが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力により、互いに近づく方向に移動するので、双方の先端部が閉じた状態になる。
一方、この時、カム270の最外縁部273の内、最大突出部273bが、依然として引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触していることにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図8において反時計方向に回動した状態を維持しており(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態を維持している。
よって、一対の取出爪261L、261Rの先端部261Lp、261Rpは、取り出した苗22を先端部にしっかりと保持することが出来、そのまま、植付具11側へ移動して行く。
尚、一対の取出爪261L、261Rの先端部261Lp、261Rpが位置K3から位置K4に向かう間において、中間突出部273cにおける接触位置273c1(図8参照)が、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触し、これにより、押出ロッド281が、押出位置273a1の手前で少し突き出されて、押出端面部281Sが苗22に接触することは、上述した通りである。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K4から位置K5に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、位置K4から位置K5に向かう動作を開始すると同時に、カム270の最外縁部273の内、中間突出部273cに代わり最小突出部273aが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触する。
これにより、押出アーム引っ張りバネ284の復元力で、押出アーム283は、引っ張りバネ保持用第1突起283cの根元部が、押出位置273a1の手前の接触位置273c1に移動した時に、時計方向に少し回動し、その後、押出位置273a1にきた時に、瞬時に、時計方向に回動した状態となる(図8の矢印D参照)。
即ち、連結棒282で連結された押出ロッド281は、引っ張りバネ保持用第1突起283cの根元部が接触位置273c1にきた時に少し突き出されて、その後、押出位置273a1にきた時に、押出ロッド281は完全に突き出されると同時に、押出ロッド281の押出端面部281Sの切欠部281bが、一対の取出爪261L、261Rの先端部を押し広げながら移動する。
これにより、押出ロッド281を、一旦、その押出端面部281Sが苗22に接触する程度まで突き出して、その後、押出位置273a1で苗22を押し出すことで、根鉢がくずれにくく、苗22を植付具11に放出するタイミングも安定する。
また、この時、押出ロッド281の先端部281aの切欠部281bが、一対の取出爪261L、261Rの先端部を押し広げながら移動することになるので、その先端部に付着していた土等が同時に取り除かれる。
次に、一対の取出爪261L、261Rの先端部261Lp、261Rpが、位置K5から位置K6に向かう動作を行う時の一対の取出爪261L、261Rの先端部261Lp、261Rpの開閉動作、及び、押出ロッド281の動作は次の通りである。
即ち、カム270の外周部272の内、肉薄部分である第1の範囲272aに代わり肉厚部分である第2の範囲272bが、左右一対の爪先端幅規制突起262L、262Rの先端面と接触することにより、一対の取出爪261L、261Rの先端部261Lp、261Rpは、引っ張りバネ263の復元力に対抗して、互いに遠ざかる方向の力が作用して、双方の先端部が開いた状態に変化する。
一方、位置K6の近傍に来た時、カム270の最外縁部273の内、最小突出部273aに代わり最大突出部273bが、引っ張りバネ保持用第1突起283cの根元部の外周縁部に接触することにより、押出アーム引っ張りバネ284が引き延ばされ、押出アーム283は、図8において反時計方向に回動さられて(矢印C参照)、連結棒282で連結された押出ロッド281が後退した状態に変化する。
尚、上記実施の形態では、一対の取出爪261L、261Rを根元部から先端部に亘、一体もので同一の金属製の板部材で構成されている場合について説明したが、これに限らずの先端側について、取り外しが可能で弾性を有した例えばゴム板や、樹脂板で構成されていても良い。これにより、引っ張りバネ263の復元力で先端部が苗22をつかんでも、先端側の弾性によりゴム板の方が変形するので、苗22を潰さないという効果を発揮する。
また、押出ロッド281は、一対の取出爪261L、261Rの先端部261Lp、261Rpが位置K6の近傍に移動するまでは、一対の取出爪261L、261Rの先端部261Lp、261Rpの上方を覆う様に構成されているが、これにより、位置K5から位置K6に移動する際に、トレイ20上の苗22の葉が一対の取出爪261L、261Rの先端部261Lp、261Rpに引っ掛かるのを防止出来る。
また、押出ロッド281は、一対の取出爪261L、261Rの先端部261Lp、261Rpが、育苗ポット21に挿入される時の挿入速度に合わせて、後退させる構成としており、これにより、苗22の葉が先端部261Lp、261Rpに絡まるのを防止出来る。
次に、再び、図5、図6を参照しながら、トレイ供給装置100のトレイ送りロッド121を間欠的に駆動させる機構を中心に更に説明する。
図6に示す通り、トレイ縦送り装置120は、(1)上述したトレイ送りロッド121と、(2)トレイ送りロッド121の両端部121bの上側先端部121b1が固定され、片方が内側に湾曲した湾曲縁部131aを有する突起状カム131が下部に形成された送りロッドアーム130と、(3)根元部141が、苗置台110の側板110aに回動自在に支持され、先端部142で送りロッドアーム130を回動自在に支持する、下端縁部に第1凹部143a、第2凸部143b、第3凹部143cが側面視で滑らかに連続して形成された送りアーム140と、(4)苗移植機1の動力原から得た駆動力により矢印E方向に回動する縦送り回動軸151を取出装置200側から見て、縦送り回動軸151の中央位置と右端位置の2箇所にそれぞれ固定され、先端部に牽制ローラ152を回動自在に有する縦送り駆動アーム150と、を備える。
また、送りアーム140の先端部142と、苗置台110の側板110aの下部110a1との間には、送りアーム140に常に下向きに引っ張る力が印加される様に、送りアーム引っ張りバネ160が取り付けられている。また、送りアーム140の根元部141には、送りロッドアーム130の上端部に取り付けられたピン132に一方端が取り付けられた送りロッドアーム引っ張りバネ161の他方端を保持するバネ取付ロッド163が固定されている。
次に、図5、図6を参照しながら、トレイ送りロッド121の間欠的な動作について説明する。
リードカム軸171の回動により、苗置台110が右方向すなわち矢印F方向(図5参照)に向けて移動しているとする。その時、縦送り回動軸151は矢印E方向に回動している(図6参照)。
その間において、取出装置200は、右端の育苗ポット21から順次、苗22を取り出して植付具11に苗22を供給しており、その後、苗置台110が最右端に移動した時点で、最左端の育苗ポット21の苗22が取出装置200により取り出される。これにより、育苗ポット21の横一列分の全ての苗22が取り出されたことになる。
この時、縦送り回動軸151と共に矢印E方向に回動している、縦送り回動軸151の右端に固定されている縦送り駆動アーム150の先端部に回動自在に取り付けられている牽制ローラ152が、送りアーム140の第1凹部143aとの接触を開始した後、少し遅れて送りロッドアーム130の湾曲縁部131aとの接触を開始する構成であるので、トレイ送りロッド121は、送りアーム140の時計回りの回動に伴い一旦上昇移動した後、先端部142の軸中心で反時計回りに回動を開始する。
即ち、トレイ送りロッド121が、矢印121a0(図5(b),図6参照)の方向に一旦上昇移動することにより、それまで切り欠き部112aに保持されていたトレイ送りロッド121の突起部121abが、切り欠き部112aから抜け出すと共に、それまで育苗ポット21の裏側の隙間21aで待機していたトレイ送りロッド121の中央部121aも、その隙間21aの範囲内で矢印121a0の方向に上昇移動する。その後、送りロッドアーム130が、先端部142の軸中心で反時計回りに回動を開始することにより、トレイ送りロッド121の中央部121aは、矢印121a1(図6参照)の方向に移動する。尚、切り欠き部112aの切り欠き深さは、トレイ送りロッド121の中央部121aが隙間21aの範囲内で移動できる程度に設定されている。
その後、更に、牽制ローラ152が回動を続けると、牽制ローラ152が送りロッドアーム130の湾曲縁部131aとの接触を続けているため、トレイ送りロッド121の中央部121aは退避溝111aに位置した状態を維持している。この時、同時に牽制ローラ152が送りアーム140の第1凹部143aから第2凸部143bに向けて移動するので、送りアーム140は更に時計回りに回動し、トレイ送りロッド121の中央部121aは、結果的に、退避溝111aに位置した状態を維持しつつ、矢印121a2(図6参照)の方向に移動する。
その後、更に、牽制ローラ152が回動を続けると、牽制ローラ152が送りロッドアーム130の湾曲縁部131aと非接触状態となると同時に、送りロッドアーム引っ張りバネ161の復元力により送りロッドアーム130が先端部142の軸中心で時計回りに瞬時に回動することで、トレイ送りロッド121の中央部121aは、隙間21aから育苗ポット21の一列分だけ上側に位置する隙間21bに向けて、矢印121a3に示す様に移動する。
その後、更に、牽制ローラ152が回動を続けると、牽制ローラ152は、送りアーム140の第3凹部143cと接触しながら移動するので、送りアーム引っ張りバネ160の復元力により送りアーム140が下方に引っ張られて、トレイ送りロッド121の中央部121aは、結果的に、隙間21bに位置した状態を維持しつつ、矢印121a4(図6参照)の方向に移動するとともに、トレイ送りロッド121の中央部121aの突起部121abが切り欠き部112aに保持される。
そして、矢印121a4(図6参照)の方向に移動したトレイ送りロッド121の中央部121aは、育苗ポット21の裏側の育苗ポット同士の隙間に位置した状態を維持しており、苗置台110が、矢印G方向、即ち左方向に移動を開始すると、取出装置200は、左端の育苗ポット21から順次、苗22を取り出して植付具11に苗22を供給し、その後、苗置台110が最左端に移動した時点で、最右端の育苗ポット21の苗22が取出装置200により取り出される。これにより、育苗ポット21の横一列分の全ての苗22が取り出されたことになる。
また、この間は、トレイ送りロッド121の中央部121aの突起部121abが切り欠き部112aに保持されているので、育苗ポット21に入れられている苗22の重みでトレイ20が下方へずれ動くことを防止出来る。
尚、育苗ポット21の横一列分の全ての苗22が取り出されると、上記と異なり、縦送り回動軸151の中央位置に固定されている縦送り駆動アーム150の先端部に回動自在に取り付けられている牽制ローラ152が、送りロッドアーム130の湾曲縁部131aと、送りアーム140の第1凹部143aとの接触を開始する。
上記の動作を繰り返すことにより、トレイ20は、右方向又は左方向に移動されるとともに、育苗ポット21の一列分だけ間欠的に縦送りされる。
これにより、コンパクトな構造のトレイ縦送り装置120が得られる。また、案内レール155と、リードカム軸171の簡単な構造でトレイ搬送路111を左右移動可能に支持出来る。
また、トレイ送りロッド121の中央部121aは、トレイ搬送路111の平面部111bに配置されているので、トレイ20が内側に撓むことがないので、育苗ポット21の裏側において、一定幅の隙間21a、21bを確保出来るため、トレイ送りロッド121が隙間21a、21bに確実に入ることが出来る。
また、トレイ搬送路111の平面部111bの下流側に曲面部111cが設けられているので、トレイ20はその曲面にそって撓む。そのため、トレイ送り時に、トレイ送りロッド121が、矢印121a2の方向に移動している時でも、その撓みが抵抗となって、トレイ20が下流側にずれることが防止される。
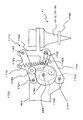
次に、図10、図11、図12を用いて、上述した苗植付装置300、及び苗植付装置駆動機構400について更に説明する。
図10は、苗植付装置300と苗植付装置駆動機構400の左側面図である。
また、図11は、苗植付装置駆動機構400の内部構成、規制アーム460、及び苗植付装置駆動機構400の右側面に配置された駆動装置1400を説明するための概略右側面図である。
また、図12(a)は、苗植付装置駆動機構400の一部である駆動装置1400及びストッパーアーム1410の平面図であり、図12(b)は、駆動装置1400及びストッパーアーム1410の背面図であり、図12(c)は、駆動装置1400及びストッパーアーム1410の右側面図である。
苗植付装置300は、図10に示す通り、苗22を圃場に植付ける植付具11と、植付具11を上下方向に揺動させるための互いに平行に配置された上アーム311と下アーム312を有する揺動リンク機構310と、下アーム312に第1連結軸321を介して回動自在に取り付けられ、揺動リンク機構310を上下動させる上下動アーム320を備えている。第1連結軸321は上下動アーム320に固定されている。
尚、上下動アーム320を回動させるための上下動アーム駆動軸440は、苗植付装置駆動機構400から突き出して設けられており、その先端部に上下動アーム320が固定されている。
更に苗植付装置300は、図10に示す通り、下アーム312に第2連結軸341を介して回動可能に取り付けられるとともに植付具11を開閉させる開閉アーム340と、第1連結軸321に固定されるとともに、第2連結軸341を中心として開閉アーム340の先端部に第3連結軸343を介して回動自在に取り付けられた開閉ローラ342の外周縁部に当接しながら回動することにより、開閉アーム340を前後方向に揺動させる開閉カム322と、一端部351が開閉アーム340の先端部の第3連結軸343に連結され、他端部352が植付具11の開閉機構11a側に連結された開閉用連結ケーブル350と、を備えている。
ここで、上述した揺動リンク機構310について更に説明する。
即ち、揺動リンク機構310は、図10に示す通り、苗植付装置駆動機構400を収納したケーシング401の前側上端部401aに、上端が上前軸313aに回動自在に支持され、下端が下前軸314aを介して回動自在に連結支持板315に連結された前揺動アーム316aと、苗植付装置駆動機構400を収納したケーシング401の後側上端部401bに、上端が上後軸313bに回動自在に支持され、下端が下後軸314bを介して回動自在に連結支持板315に連結された後揺動アーム316bとを備え、連結支持板315に設けられた上軸316に、上述した上アーム311の前端部が回動自在に連結され、且つ、連結支持板315の下後軸314bに、上述した下アーム312の前端部が回動自在に連結されているとともに、上アーム311及び下アーム312のそれぞれの後端部が、植付具11の支持板317に設けた回動上軸317aと回動下軸317bに回動自在に連結されている。
尚、本実施の形態の苗22が、本発明の移植物の一例にあたる。
上記構成により、苗植付装置駆動機構400において上下動アーム駆動軸440に回転駆動力が伝動されると、上下動アーム駆動軸440に固定されている上下動アーム320が矢印A1の方向に回動することにより、下アーム312及び上アーム311が上下に揺動を繰り返すとともに前後への揺動も行われて、植付具11による苗22の植付動作が、畝Uに対して所定の間隔で自動的に行われる。
また、この植付動作の際、第1連結軸321が固定されている上下動アーム320が、矢印A1の方向に回動すると、第1連結軸321に固定されている開閉カム322が開閉ローラ342の外周縁部に当接しながら回動するので、開閉アーム340が第2連結軸341を中心にして前方向(反時計方向)に揺動(回動)する。その動作にともなって、開閉用連結ケーブル350の一端部351が前方向に引っ張られるので、開閉機構11aが植付具11を開くべく動作する。
また、開閉アーム340が第2連結軸341を中心にして後方向(時計方向)に揺動(回動)すると、開閉機構11aに設けられた植付具11を常に閉じる方向に付勢する付勢ばね(図示省略)の作用により、開閉用連結ケーブル350の一端部351が後方向に引っ張られるので、開閉機構11aが植付具11を閉じるべく動作する。
上記構成により、上下動アーム320の駆動が1軸のため構造がシンプルであるとともに、上下動アーム320、開閉アーム340、及び開閉カム322をコンパクトに構成でき、植付作動を円滑に行える。
次に、平面視で苗植付装置300より右側に配置(図2参照)された苗植付装置駆動機構400における上下動アーム駆動軸440への伝動の入り切りを行うクラッチ機構について、主として図11〜図12(c)を用いて更に説明する。
苗植付装置駆動機構400は、図11に示す通り、植付伝動装置18から出力される植付作業の駆動力を植付クラッチ420に伝動するための第1ギア410と、第1ギア410からの駆動力を受けて上下動アーム駆動軸440への伝動を「入り」状態にするか「切り」状態にするかを切り替える植付クラッチ420と、植付クラッチ420が「入り」状態のときに駆動力が伝動される、植付クラッチ420の伝動軸421に対して固定されている伝動ギア421aから駆動力を受ける第2ギア430と、第2ギア430と同軸に固定された小径ギア430aと噛み合って上下動アーム駆動軸440に駆動力を伝動するための、上下動アーム駆動軸440に固定された第3ギア450とを、それぞれ回動可能に配置している。ここで、植付クラッチ420の伝動軸421は、植付クラッチ420が「切り」状態のときは、回動せずに停止しており、第2ギア430への駆動力の伝動は行わない。
尚、本実施の形態の植付クラッチ420として、従来の定位置停止クラッチを使用しても良い。
また、苗植付装置駆動機構400は、図11に示す通り、植付クラッチ420の伝動下流側に設けられ上下動アーム駆動軸440に固定されるとともに、植付クラッチ420を「入り」状態から「切り」状態に強制的に切り替えるために円形状の外周縁部の一部に形成された凸部441aを有する間欠用カム441と、先端部が間欠用カム441の外周縁部に当接するべく配置された第1アーム460Aを有すると共に、先端部が植付クラッチ420に当接及び離隔可能に配置された第2アーム460Bを有した、ケーシング401により回動自在に支持された回動軸461に対して固定された規制アーム460とを備えている。
ここで、第1アーム460Aの先端部が、間欠用カム441の凸部441aに当接することにより、規制アーム460が、右側面視で、回動軸461を中心に反時計回り(図11の矢印M参照)に回動して、第2アーム460Bの先端部が植付クラッチ420に当接し、第1アーム460Aの先端部が、間欠用カム441の凸部441a以外の外周縁部に当接することにより、規制アーム460が、右側面視で、回動軸461を中心に時計回り(図11の矢印N参照)に回動して、第2アーム460Bの先端部が植付クラッチ420から離隔する構成である。
また、第2アーム460Bの先端部が植付クラッチ420から離隔すると当該植付クラッチ420が「入り」状態となり、第2アーム460Bの先端部が植付クラッチ420に当接すると当該植付クラッチ420が「切り」状態となる構成である。
尚、本実施の形態の間欠用カム441は本発明のカム部材の一例にあたり、本実施の形態の規制アーム460は本発明の規制部材の一例にあたる。
また、苗植付装置駆動機構400の駆動装置1400は、図11〜図12(c)に示す通り、回動軸461に一端部が固定されたストッパーアーム1410と、ストッパーアーム1410を、右側面視で、回動軸461を中心に時計回り(図11の矢印N参照)に回動させる方向に常時付勢する引っ張りバネ1420と、ストッパーアーム1410が、右側面視で、回動軸461を中心に時計回り(図11の矢印N参照)に回動することを規制するストッパープレート1430と、ストッパープレート1430を、走行車体15の左右方向に駆動させるソレノイド1440とを有している。
また、引っ張りバネ1420の一端部は、ストッパーアーム1410の上端側に取り付けられており、他端部は、ケーシング401の上端側に取り付けられている。
また、ソレノイド1440の右側面部1440a(図12(a)、図12(b)参照)から、走行車体15の左右方向に移動可能な棒状ロッド1443が突き出しており、その棒状ロッド1443の先端の切り欠き部にストッパープレート1430の根本部1431が連結されている。
ソレノイド1440は、平面視で長方形状のソレノイド搭載プレート1441の上に固定されており、ソレノイド搭載プレート1441の先端側(図12(a)の図中の右側)には、ストッパーアーム1410の先端部1410aが進入可能な第1切り欠き部1441aが、走行車体15の前後方向に沿って設けられている。
また、ソレノイド搭載プレート1441の先端側の下面には、背面視で、略L字形状に屈曲したソレノイド固定アングル1442(図12(b)参照)が固定されている。ソレノイド固定アングル1442においても、上記第1切り欠き部1441aに対応する位置に、同じ形状の第2切り欠き部1442a(図12(b)参照)が設けられている。ソレノイド固定アングル1442の下方に折り曲げられた部位が、ケーシング401の上端部に対して締結部材1442bで固定されている。
一方、ストッパープレート1430は、根本部1431と先端部の間おいて、上下幅が他の部位より広い鍔部1432を有しており、鍔部1432から先の部位には、一定の上下幅を有している作用部1433と、下端部が切り欠かれてその上下幅が作用部1433より狭い非作用部1434が形成されている。作用部1433は、ストッパーアーム1410の先端部1410aが当接することによりストッパーアーム1410の矢印N方向への移動を規制する機能を有し、非作用部1434は、ストッパーアーム1410の先端部1410aが通過することによりストッパーアーム1410の矢印N方向への移動を許可する機能を有している。
また、ソレノイド搭載プレート1441の先端側の上面には、バックプレート1460が締結部材1460aにより固定されている。バックプレート1460は、第1バックプレート1461と、第1バックプレート1461の前端部1461bから直角に曲げられて、走行車体15の左右幅方向を基準として右方向に延びた第2バックプレート1462と、第2バックプレート1462の下端部から更に直角に曲げられて、走行車体15の前後方向を基準として前方向に延びた第3バックプレート1463から構成されている。
第1バックプレート1461は、ソレノイド1440の右側面部1440aに対して平行に配置されており、長方形状のスリット1461aを有している。スリット1461aの上下の幅は、ストッパープレート1430の作用部1433は貫通して矢印Q1方向及び矢印Q2方向への移動が可能であるが、ストッパープレート1430の鍔部1432は貫通出来ない様に構成されている。
また、第2バックプレート1462は、ストッパーアーム1410の先端部1410aが進入可能な、上下方向に延びた第3切り欠き部1462aを有している。
また、第3バックプレート1463は、ストッパーアーム1410の先端部1410aが進入可能な、第2バックプレート1462の第3切り欠き部1462aの下端部と連通した第4切り欠き部1463aを有している。
尚、第3バックプレート1463の第4切り欠き部1463aと、ソレノイド搭載プレート1441の第1切り欠き部1441aと、ソレノイド固定アングル1442の第2切り欠き部1442aは、平面視で、互いに完全に重複するべく構成されている(図12(a)参照)。
また、ストッパープレート1430の鍔部1432と、ソレノイド1440の右側面部1440aとの間には、圧縮ばね1450が配置されており、ストッパープレート1430を矢印Q1方向(図12(a)、図12(b)参照)に常時付勢している。
本実施の形態のソレノイド1440は、後述する制御部800(図15参照)からソレノイド1440への通電(パルス信号による短時間の通電)が開始されると、通電中は、ソレノイド1440の棒状ロッド1443が、圧縮ばね1450による矢印Q1方向への付勢力に対抗して矢印Q2方向に吸引される構成である。
即ち、ソレノイド1440への通電の開始により、棒状ロッド1443が矢印Q2方向に吸引されると、ストッパープレート1430の作用部1433がスリット1461aを通過してソレノイド1440側に引き込まれると共に、非作用部1434が、ストッパーアーム1410の先端部1410aの前側に移動してくる。即ち、ソレノイド1440への通電により、ストッパープレート1430の位置は、作用状態から非作用状態に切り替えられる。
そのため、ストッパープレート1430の作用部1433による、ストッパーアーム1410の先端部1410aに対する移動規制が解除されて、ストッパーアーム1410が、回動軸461を中心として、時計回り(図11の矢印N参照)に回動すると共に、第2アーム460Bの先端部が植付クラッチ420から離隔する。
これにより、植付クラッチ420が「切り」状態から「入り」状態に移行し、エンジンからの駆動力が植付クラッチ420を介して上下動アーム駆動軸440側に伝達される。
そして、上下動アーム駆動軸440に固定されている間欠用カム441が回動を開始する。
尚、非作用状態にあるときのストッパープレート1430の位置を、図11において二点鎖線で示した。
ここで、ストッパープレート1430の位置が非作用状態にあり、且つ、ストッパーアーム1410の先端部1410aが、第1切り欠き部1441a〜第4切り欠き部1463aに進入している状態において、ソレノイド1440への通電が停止された場合について説明する。
即ち、この場合、ソレノイド1440による吸引力が無くなるので、棒状ロッド1443に連結されているストッパープレート1430は、圧縮ばね1450による付勢力により矢印Q1方向に飛び出すが、非作用部1434の切り欠き部の内、作用部1433に隣接する端縁部1434a(図12(b)参照)が、ストッパーアーム1410の先端部1410aの内面側に当接して、矢印Q1方向への移動が阻止される。そして、ストッパーアーム1410の先端部1410aは、第1切り欠き部1441a〜第4切り欠き部1463aに進入している状態を依然として維持しているので、植付クラッチ420は、第1アーム460Aの先端部が間欠用カム441の凸部441aに当接し、「切り」状態に移行するまでは、「入り」状態を維持する。
そして、上下動アーム駆動軸440に固定されている間欠用カム441が更に回動を続け、第1アーム460Aの先端部が間欠用カム441の外周縁部の凸部441aに当接することで、植付クラッチ420が、「入り」状態から「切り」状態に移行する。
これにより、上下動アーム駆動軸440側への駆動力の伝達が停止される。
また、第1アーム460Aの先端部が間欠用カム441の外周縁部の凸部441aに当接することで、ストッパーアーム1410が、回動軸461を中心として、反時計回り方向(図11の矢印M参照)に回動する。
これにより、ストッパープレート1430は、それまで、作用部1433に隣接する端縁部1434a(図12(b)参照)が、ストッパーアーム1410の先端部1410aの内面側に当接して、矢印Q1方向への移動が阻止されていた状態から開放されて、矢印Q1方向へ飛び出し、鍔部1432が第1バックプレート1461のスリット1461aの上下の周縁部に当接して停止する。
尚、植付クラッチ420が、「入り」状態から「切り」状態に移行した際、第1アーム460Aの先端部が、間欠用カム441の凸部441aとの当接位置を通過した位置で、間欠用カム441が回動を停止する様に苗植付装置駆動機構400が構成されている。
従って、植付クラッチ420が、「切り」状態にある場合、ソレノイド1440への通電によりストッパープレート1430を矢印Q2方向へ移動させる、或いは、作業者が、ストッパープレート1430の先端部1430a(図12(a)参照)を手で矢印Q2方向へ任意のタイミングで押すことにより、ストッパープレート1430の位置が作用状態から非作用状態に切り替わるので、それまで作用部1433により移動が規制されていたストッパーアーム1410の先端部1410aの移動が許可されて、ストッパーアーム1410が回動軸461を中心として時計回り方向(図11の矢印N方向参照)に回動し、植付クラッチ420を「切り」状態から「入り」状態に移行させることが出来る。
以上の構成により、駆動装置1400は、ソレノイド1440によりストッパープレート1430を駆動するのみの簡単な構造となり、ソレノイド1440の小型化が図れ、軽量化及びコストダウンが図れる。
また、ストッパープレート1430の鍔部1432と、ソレノイド1440の右側面部1440aとの間に、圧縮ばね1450を設けて、ソレノイド1440への通電の有無に関わらず、作業者が任意のタイミングで、植付クラッチ420を「入り」状態にできるので、一時的に植付位置の手動調整が出来る。
また、メンテナンス性が向上する。
また、ストッパープレート1430の表面に平行に配置された第2バックプレート1462により、ストッパープレート1430との摺動部が平面であるため、ストッパープレート1430がスムーズに移動出来る。
尚、本実施の形態の引っ張りバネ1420は、本発明の付勢部材の一例にあたり、本実施の形態のストッパープレート1430は、本発明のストッパーの一例にあたる。また、本実施の形態のソレノイド1440は、本発明のアクチュエータの一例にあたる。また、本実施の形態の圧縮ばね1450は、本発明の融通機構の一例にあたる。
また、上述した引っ張りばね1420は、第2アーム460Bの先端部を植付クラッチ420が「入り」状態となる方向に、且つ、第1アーム460Aの先端部を間欠用カム441の外周縁部に押し付ける方向に付勢するためのばねである。
以上の構成によれば、植付クラッチ420の伝動下流側に設けられた間欠用カム441を使用して、植付クラッチ420を「入り」状態から「切り」状態に出来、簡単な構成の間欠植付機構が実現出来る。
また、第1アーム460Aと第2アーム460Bとが、回動軸461を中心として一体回動する構成とし、且つ、その回動軸461を植付クラッチ420の伝動軸421よりも間欠用カム441側に配置したことにより、第1アーム460Aと第2アーム460Bとが合理的で且つコンパクトに構成出来る。
次に、図11を参照しながら、苗植付装置駆動機構400における上下動アーム駆動軸440への伝動の入り切りを行う植付クラッチ420と間欠用カム441の動作を中心に、項目Aから項目Cの3つの場面に分けて、それぞれ説明する。
A.ソレノイド1440に通電(パルス信号による短時間の通電)されると、ソレノイド1440の先端の棒状ロッド1443が、圧縮ばね1450の復原力(伸長力)に対抗して矢印Q2の方向に吸引される。
これにより、棒状ロッド1443に連結されたストッパープレート1430の作用部1433が、第1バックプレート1461のスリット1461aを通過してソレノイド1440側に引き込まれると共に、非作用部1434が、ストッパーアーム1410の先端部1410aの端縁部1410a1(図11参照)の前側に移動してくる。
即ち、ソレノイド1440に通電されることで、ストッパープレート1430の作用部1433による、ストッパーアーム1410の先端部1410aに対する移動規制が解除されて、ストッパーアーム1410が、回動軸461を中心として、時計回り(図11の矢印N参照)に回動して、ストッパーアーム1410の先端部が、第1切り欠き部1441aに進入すると共に、第2アーム460Bの先端部が植付クラッチ420から離隔する。
これにより、第2アーム460Bの先端部が植付クラッチ420から離れることで、下記のi)とii)の動作が行われる。
i)当該植付クラッチ420が「入り」状態となり、伝動軸421が回動することで、第2ギア430側へ駆動力が伝達されて、第3ギア450を介して上下動アーム駆動軸440が回動を開始する。
ii)一方、第1アーム460Aの先端部は、間欠用カム441の外周縁部に形成された凸部441aから離れて、外周縁部441bの表面に沿いながら(この直前まで、第1アーム460Aの先端部は、間欠用カム441の凸部441aを通過し、且つ外周縁部から隔離した位置で停止しつつ、植付クラッチ420が「切り」状態にあり、上下動アーム駆動軸440は回動を停止している)、間欠用カム441と上下動アーム320は回動を続ける。
なお、ソレノイド1440への通電は短時間であり、その通電が停止された後は、ソレノイド1440において、矢印Q2方向(図12(a)参照)への吸引力は発生せず、棒状ロッド1443に連結されているストッパープレート1430は、圧縮ばね1450による付勢力により矢印Q1方向に移動する。
しかし、ストッパープレート1430の非作用部1434の切り欠き部の内、作用部1433に隣接する端縁部1434a(図12(b)参照)が、第1切り欠き部1441aに既に進入しているストッパーアーム1410の先端部1410aの内面側に当接して、矢印Q1方向への移動が阻止される。
即ち、ソレノイド1440への通電が停止した後でも、ストッパーアーム1410の先端部1410aが、第1切り欠き部1441aに進入した状態が維持されるので、第1アーム460Aの先端部は、間欠用カム441の外周縁部に形成された凸部441aから離れて、外周縁部の表面に沿った状態が維持される。
従って、第1アーム460Aの先端部が、間欠用カム441の外周縁部に形成された凸部441aから離れて、外周縁部の表面に沿った状態が維持されている間は、第2アーム460Bの先端部が、植付クラッチ420から離れているので、当該植付クラッチ420は「入り」状態を維持することが出来て、上下動アーム320の回動により植付具11(図10参照)は上下動(植付動作)を続けて、間欠用カム441が1回転する間に、植付具11は1回だけ植付動作を実行する。
B.その後、間欠用カム441が1回転の動作を完了すると同時に、第1アーム460Aの先端部が間欠用カム441の凸部441aに乗り上げると、ストッパーアーム1410が回動軸461を中心にして反時計回り(図11の矢印M参照)に回動する。
これにより、ストッパープレート1430は、それまで、作用部1433に隣接する端縁部1434a(図12(b)参照)が、ストッパーアーム1410の先端部1410aの、ソレノイド1440に面する内面側に当接して、矢印Q1方向への移動が阻止されていた状態から開放されて、矢印Q1方向へ飛び出し、鍔部1432が第1バックプレート1461のスリット1461aの上下の周縁部に当接して停止する。このとき、ストッパーアーム1410の先端部1410aの端縁部1410a1(図11参照)の前側には、ストッパープレート1430の作用部1433が位置している。
一方、第1アーム460Aの先端部が間欠用カム441の凸部441aに乗り上げると、第2アーム460Bの先端部が植付クラッチ420に当接して、植付クラッチ420は、「入り」状態から「切り」状態となり、上下動アーム駆動軸440は回動を停止する。
このとき、第1アーム460Aの先端部が、間欠用カム441の凸部441aとの当接位置を通過した位置で、間欠用カム441は回動を停止する。
そして、ストッパーアーム1410の先端部1410a(図11参照)は、ストッパープレート1430の作用部1433(図12(b)参照)により、時計回り方向(図11の矢印N参照)への回動が阻止されているため、第2アーム460Bの先端部は、植付クラッチ420に当接した状態を維持する。
これにより、第2アーム460Bの先端部が植付クラッチ420に当接することで、下記のi)とii)の動作が行われる。
i)植付クラッチ420は、「入り」状態から「切り」状態となり、伝動軸421の回動が停止することで、第2ギア430側へ駆動力が伝達されなくなるので、上下動アーム駆動軸440は回動を停止する。
ii)一方、第1アーム460Aの先端部が間欠用カム441の外周縁部に形成された凸部441aとの当接位置を通過した位置に留まったまま(この直前まで、第1アーム460Aの先端部は間欠用カム441の外周縁部441bに沿いつつ、植付クラッチ420が「入り」状態にあり、上下動アーム駆動軸440は回動を続けている)、間欠用カム441と上下動アーム320は回動を停止し続けるので、植付具11(図10参照)は上下動(植付動作)を停止し続ける。
C.更にその後、任意のタイミングでソレノイド1440が通電されると、植付クラッチ420が「入り」状態となり、上記項目Aで説明した動作を開始する。
上記構成によれば、ソレノイド1440に通電する、上記任意のタイミングを制御することにより、植付具11の上下動(植付動作)が停止している時間を調節できるものである。これにより、簡単な構成で間欠植付が可能となる。
また、植付クラッチ420が、「切り」状態にある場合、作業者が、ストッパープレート1430の先端部1430a(図12(a)参照)を手で矢印Q2方向へ任意のタイミングで押すことにより、ストッパープレート1430の位置が作用状態から非作用状態に切り替わるので、それまで作用部1433により移動が規制されていたストッパーアーム1410の先端部1410aの移動が許可されて、ストッパーアーム1410が回動軸461を中心として時計回り方向(図11の矢印N方向参照)に回動し、植付クラッチ420を「切り」状態から「入り」状態に移行させることが出来る。
次に、図13を参照しながら、操縦ハンドル8の左右一対のハンドルグリップ8L、8Rの近傍に配置された各種操作レバー、及び操作部600について説明する。図13は、操縦ハンドル8の左右一対のハンドルグリップ8L、8Rの近傍に配置された各種操作レバー、及び操作部600を説明する平面図である。
図13に示す通り、操縦ハンドル8の左側のハンドルグリップ8Lの近傍には、主クラッチレバー80が設けられ、右側のハンドルグリップ8Rの近傍には、油圧昇降シリンダ10を作動させる昇降操作レバー81が設けられている。
尚、図13では、例えば、主クラッチレバー80の位置が、図1、図2に示す位置と異なるが、それらの配置については、どこに配置されていても良く、これらの位置に限定されるものではない。
昇降操作レバー81は、「下げ」、「中立」、「上げ」の3段階に手動切り替え可能に構成されており、「下げ」位置に切り替えると、油圧昇降シリンダ10が走行車体15を下降させるべく作動し、後述するセンサ板710(図14参照)により下降が停止されると共に、後述する植付入り切りボタン620(図13参照)がON状態であれば、植付クラッチ420が「入り」状態となり、植付作業が開始される。
また、昇降操作レバー81を「中立」位置に切り替えると、植付作業を停止させ、「上げ」位置に切り替えると、油圧昇降シリンダ10が走行車体15を上昇させるべく作動する。
また、図13に示す通り、操作パネル601には、その左端から右端に向けて順に、(1)走行車体15の走行を停止させた状態で植付具11のみ作動させるための空植操作ボタン610と、(2)昇降操作レバー81が、走行車体15を下降させる下降操作位置に操作された際、その下降操作に連動して植付具11を作動させる状態と、その下降操作に連動させない状態との何れかに切り替える植付入り切りボタン620と、(3)少なくとも植付株間を表示する表示部630と、(4)少なくとも植付株間を調節する調節ボタン640と、が配置されている。
上記構成により、植付入り切りボタン620が、操作パネル601の中央部付近に配置されているので、操作がし易い。
また、空植操作ボタン610が、他の操作ボタンが配置された上面601aとは異なる後面601bの左側に配置されているので、作業者による誤操作を低減することが出来る。
また、表示部630が、操作パネル601の中央付近に配置されているため、確認し易い。
調整ボタン640は、上側に株間を広げる方向に変化させる「上げ」プッシュスイッチ640aと、下側に株間を狭める方向に変化させる「下げ」プッシュスイッチ640bとを備えている。
上記構成により、「上げ」プッシュスイッチ640a、「下げ」プッシュスイッチ640bを操作することで、株間を示す数値がダイレクトに表示部630に表示されるので、作業者が株間を認識し易い。
次に、主として図14、図15を参照しながら、植付深さ調整機構700と、植付入り切りボタン620と、昇降操作レバー81等の操作に基づいて、植付の入り切りを行うソレノイド1440等の動作を制御する制御部800を中心に説明する。
図14は、植付深さ調整機構700の概略構成を示す左側面図であり、図15は、制御部800への入出力を説明する概略構成図である。
図14に示す通り、植付深さ調整機構700は、(1)圃場面701に接することで苗の植付深さを一定に保持する、底面が緩やかに湾曲したセンサ板710と、(2)側面視で略L字形状の板状部材であって、L字の屈曲部が回動支持軸721により走行車体15に対して回動可能に支持され、後方に延びる一端部722がセンサ板710の前端部711と回動支持軸722aを介して回動自在に連結されると共に、上方に延びる他端部723が、作業者が手動で操作してセンサ板710の垂直(上下)方向の位置を設定する深さレバー730の動きを伝達する伝達ロッド740の先端部741と回動自在に連結された深さアーム720と、(3)深さアーム720を主フレーム17から揺動自在に吊り下げるスプリング750と、(4)側面視で略L字形状の板状部材であって、L字の屈曲部が回動支持軸761により走行車体15に対して回動可能に支持され、回動支持軸761の下部に長孔762が形成されていると共に、上端部763に連結された引っ張りスプリング766により、回動支持軸761を軸芯として矢印Y方向に回動すべく付勢され、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に対して、前端部764がロッド765で連結されたカウンタアーム760と、(5)カウンタアーム760の長孔762の前端側に入り切り検知レバー771が位置すべく、カウンタアーム760上に配置された植付スイッチ770と、(6)一端部781に設けられた連結ピン781aが長孔762内に挿入され、他端部782が連結軸783を介してセンサ板710の上端部712と回動自在に連結されたセンサロッド780と、を備えている。
また、センサロッド780が、センサ板710の上方向への揺動によるセンサ板710の上端部712の矢印Z方向の揺動に連動することで、その一端部781の前端縁部781bが、入り切り検知レバー771を押す方向に移動し、植付スイッチ770をONさせる構成である。
上記構成によれば、深さアーム720がスプリング750で吊り下げされているので、深さアーム720と深さレバー730の連結部分のガタツキを無くし、深さレバー730により設定された深さが安定する。尚、スプリング750は、深さアーム720を吊り下げる構成であるが、これに限らず例えば、深さアーム720を主フレーム側に押し付ける構成であっても良い。
また、上記構成によれば、カウンタアーム760は、センサ板710を押し下げる方向に引っ張りスプリング766で引っ張られているので、センサロッド780とカウンタアーム760によるガタツキを無くすことが出来る。
また、引っ張りスプリング766の弾性力を変えることで、センサ板710を押す力を変えることが出来る。
次に、図15を参照しながら、操作パネル601の下方に設けられた制御部800によるソレノイド1440の制御方法について説明する。
図15に示す通り、制御部800には、少なくとも植付入り切りボタン620からの入り切り信号と、昇降操作レバー81の切り替え信号と、植付スイッチ770からの入り切り信号が入力され、これらの入力信号により、ソレノイド1440にパルス信号が出力される構成である。
以上の構成のもとで、主として図13〜図15を参照しながら、制御部800の動作を中心に説明する。
ここでは、苗移植機1を圃場の所定位置に移動させた後、(1)植付作業を開始しようとする場面、その後、(2)圃場内を植付作業しながら走行する場面、そして、(3)畝の端まで来て旋回する場面に分けて説明する。
(1)植付作業を開始しようとする場面:
苗移植機1を圃場の所定位置に移動させたとき、植付入り切りボタン620は「入り」
状態に、昇降操作レバー81は「上げ」位置に、それぞれ設定されており、走行車体15の車高は高い位置にあるものとする。
作業者が、昇降操作レバー81を「下げ」位置に操作して、走行車体15の車高を下げることにより、センサ板710が走行車体15と共に圃場面701に向けて下がる。
センサ板710が圃場面701に接するとセンサ板710の前端部711が矢印Z方向に回動するので、センサロッド780の前端縁部781bが、入り切り検知レバー771を押す方向に移動し、植付スイッチ770をONさせることにより、植付スイッチ770からのON信号が制御部800に入力される。
制御部800は、植付入り切りボタン620から「入り」状態を示す信号と、昇降操作レバー81から「下げ」位置を示す信号と、植付スイッチ770から「ON」信号と、をAND条件の下で受け付けたことにより、ソレノイド1440を通電させる信号を出力する。
これにより、植付クラッチ420は「切り」状態から「入り」状態に切り替わり、植付作業が開始される。
(2)圃場内を植付作業しながら走行する場面:
ここでは、昇降操作レバー81は「下げ」位置にあり、センサ板710は圃場面701の凹凸に応じて上下動しているものとする。
また、制御部800は、ソレノイド1440に対して、所定の作動周期で通電させるべく、パルス信号をその作動周期で出力する。従って、植付クラッチ420は、ソレノイド1440が通電されることにより「入り」状態になると共に間欠用カム441が回動を開始して1回転し終わると(つまり、苗の植付動作を1回し終わると)「切り」状態に戻るという一連の動作を、当該作動周期で繰り返す。
これにより、植付作業が間欠的に行われて、所望の植付株間が実現される。
センサ板710の上下動に応じて、油圧昇降シリンダ10が次の通り動作する。
即ち、センサ板710が上方に動くと、センサ板710の前端部711が回動支持軸722aを中心に矢印Z方向に移動するとともに、センサロッド780の一端部781に設けられた連結ピン781aが長孔762の前縁部を押す方向に移動すると、カウンタアーム760が回動支持軸761を軸芯として図14中において時計方向に回動し、この動きがロッド765を介して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に伝達されて、油圧昇降シリンダ10が伸びる方向に作動して、走行車体15の車高が高くなる。
一方、センサ板710が下方に動くと、センサ板710の前端部711が回動支持軸722aを中心に矢印Z方向と反対方向に移動するとともに、センサロッド780の一端部781に設けられた連結ピン781aが長孔762の前縁部から離れる方向に移動すると、引っ張りスプリング766の引っ張り力によりカウンタアーム760が回動支持軸761を軸芯として矢印Y方向に回動し、この動きがロッド765を介して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)に伝達されて、油圧昇降シリンダ10が短くなる方向に作動して、走行車体15の車高が低くなる。
上記動作により、圃場面701に凹凸があっても、苗の植付深さを一定に保持することが出来る。
(3)畝の端まで来て旋回する場面:
この場面では、作業者は、植付作業を中断させるために、昇降操作レバー81を「下げ」位置から「中立」位置に移動させる。
これにより、制御部800は、昇降操作レバー81からの、「中立」位置を示す信号を受けて、ソレノイド1440に対するパルス信号の出力を停止する。これにより、植付クラッチ420は「入り」状態から「切り」状態に切り替わった後は、「切り」状態を維持し続けるので、植付作業が中断される。
更に、作業者は、走行車体15を隣の畝に向けて旋回させるために、昇降操作レバー81を「中立」位置から「上げ」位置に移動させる。
この昇降操作レバー81の操作に応じたケーブル82の動きに連動して、油圧切替バルブ部40に備えられた昇降操作バルブ(図示省略)が作動し、油圧昇降シリンダ10が伸びる方向に移動することにより、走行車体15の車高が高くなる。
この時、センサ板710は下がり、植付スイッチ770がOFF状態になるが、制御部800からは何も信号は出力されない。
尚、植付クラッチ420は「切り」状態を維持しており、植付作業が中断したままの状態が継続されている。
そこで作業者は、走行車体15を旋回させる。
次に作業者は、昇降操作レバー81を「上げ」位置から「中立」位置を経て「下げ」位置に移動させると、昇降操作レバー81の操作に応じたケーブル82の動きに連動して、油圧切替バルブ部40に備えられた昇降操作バルブが作動し、油圧昇降シリンダ10が短くなる方向に移動することにより、走行車体15の車高が低くなり始める。尚、昇降操作レバー81の上記操作により、昇降操作レバー81が「下げ」位置にあることを示す信号が制御部800に対して出力される。
そして、走行車体15の車体が降下して、やがてセンサ板710が圃場面701に接すると、上記項目(1)で説明したのと同様に、植付スイッチ770がONし、その信号が制御部800に入力される。
植付入り切りボタン620は「入り」状態のままであるので、制御部800は、植付入り切りボタン620から「入り」状態を示す信号と、昇降操作レバー81から「下げ」位置を示す信号と、植付スイッチ770から「ON」信号と、をAND条件の下で受け付けたことにより、ソレノイド1440を通電させる信号を出力する。即ち、制御部800は、上記と同様に、ソレノイド1440に対して、所定の作動周期で通電させるべく、パルス信号をその作動周期で出力する。
これにより、植付クラッチ420は「切り」状態から「入り」状態に切り替わり、再び植付作業が開始される。
上記構成により、植付入り切りボタン620を「入り」状態にしておくことにより、昇降操作レバー81を操作するだけで、上記の(1)植付作業を開始してから、その後、(2)圃場内を植付作業しながら走行し、そして、(3)畝の端まで来て旋回した後、再び植付作業をするという一連の作業を連続して行える。
尚、上記実施の形態では、本発明のアクチュエータの一例として、通電されるとQ2方向(図12(a)参照)に引っ張られる棒状ロッド1443を備えたソレノイド1440を用いた構成について説明したが、これに限らず例えば、本発明のアクチュエータの他の例として、通電されるとQ1方向(図12(a)参照)に突き出す第2棒状ロッド(図12(a)の符号1443参照)を備えたアクチュエータを用いても良い。この構成の場合、第2棒状ロッドに連結された第2ストッパープレート(図12(b)の符号1430参照)の作用部と非作用部の配置は、上述したストッパープレート1430の作用部1433と非作用部1434の配置と逆の構成である。即ち、この構成の場合、アクチュエータへの通電がなされて、第2ストッパープレートがQ1方向に突き出した際に、ストッパーアーム1410の先端部1410aが、非作用部を通過し、アクチュエータへの通電が停止されて、第2ストッパープレートがQ2方向に引っ張られた際に、ストッパーアーム1410の先端部1410aが、作用部に当接して機体前方向への移動が規制される。
(実施の形態2)
本実施の形態2では、本発明の移植機の一実施の形態の別の苗移植機について、図16〜図18を用いて説明する。
尚、本実施の形態では、上記実施の形態1の苗移植機1と基本的に同じ構成には同じ符号を付してその説明を省略し、相違点を中心に説明する。
即ち、本実施の形態2の苗移植機は、第2植付具2011の上下動に同期して、第2植付具2011の外面、及び内面に付着した泥等を落とすスクレーパ装置1500を備えた点が、上記実施の形態1の構成と相違する。
図16は、スクレーパ装置1500を説明する概略側面図である。
また、図17は、スクレーパ装置1500を説明する概略平面図である。
また、図18は、スクレーパ装置1500の動作を説明する概略側面図である。
図16、図17に示す通り、スクレーパ装置1500は、軌跡T1(図1参照)に沿って上下動しながら下死点付近で先端側が左右方向に開閉する左右一対の左側ホッパー部1011L及び右側ホッパー部1011R(図3、図16参照)の後方に配置され、その左右一対のホッパー部の外壁面、及び内壁面に付着した泥等を落とすべく当該外壁面及び内壁面をスクレープするゴム製のスクレーパ1510と、下端部1520aにスクレーパ1510を取り付ける為のスクレーパ取り付け部1521を有すると共に、側面視で、第2植付具2011の上方に位置する、走行車体15のフレーム15aに固定されたスクレーパ支点軸1522に、上端部1520bが前後方向に回動可能に連結されたスクレーパアーム1520と、左ホッパーホルダー1012L及び右ホッパーホルダー1012R(図3(b)、図17参照)を支点軸1013aを中心に回動可能に保持するホルダー保持枠1013の左側面から外側に向けて立設されたカム取り付けピン1533の先端に固定された、側面視で、略半月形状のスクレーパ用カム1530と、を備えている。
スクレーパ用カム1530は、図16に示す通り、側面視で、略半月形状であるが、上端側は略垂直な第1縁部1531が形成されており、その下方に円弧状の第2縁部1532が形成されている。
また、スクレーパアーム1520の上端部1520bに一端部が引っ掛けられて、他端部が走行車体15のフレーム15aに引っ掛けられたスクレーパアーム引っ張りスプリング1550が配置されており、スクレーパアーム1520には、当該スクレーパアーム引っ張りスプリング1550の収縮力により、スクレーパ支点軸1522を回動の中心として、左側面視で反時計回り、即ち、後方側に向けて回動しようとする力が常に働いている。
一方、スクレーパアーム1520は、標準位置(スクレープしていない時の位置)にあるときは、苗タンクフレーム101に当たることで、後方側に向けた回動しようとする動きを止める構成である。
尚、スクレーパアーム1520が苗タンクフレーム101に当たる時の衝撃を吸収するための衝撃吸収用ストッパー(図示省略)が、スクレーパアーム1520とフレーム15aの間に設けられている。
また、スクレーパアーム1520の下端部1520aと上端部1520bの概ね中央部の左側面には、スクレーパ用ローラ1540を先端部に回動可能に保持するスクレーパ用ローラステイ1541が固定されており、当該スクレーパ用ローラ1540は、スクレーパ用カム1530に所定のタイミングで当接される位置に配置されている。
上記構成により、スクレーパ支点軸1522は、側面視で、走行車体15の上部のフレーム15aに固定されており、且つ、スクレーパ1510が後方に退避した通常の非作用状態でスクレーパ1510よりも前側に固定されている為、スクレーパ1510は、通常の非作用状態のとき、スクレーパ作用状態のときより上位になり、植え付けた苗に干渉しにくくなる構成である。
尚、本実施の形態の第2植付具2011は、本発明の植付ホッパの一例にあたる。
次に、主として図18を用いて、スクレーパ装置1500の動作について、第2植付具2011の左右一対のホッパー部1011L、1011Rの先端の上下動と関連づけながら説明する。
(1)第2植付具2011が苗22を圃場に植え付けた後、左右一対のホッパー部1011L、1011Rの先端が軌跡T1上のホッパー第1位置T1aに移動する場面と、そこから更に左右一対のホッパー部1011L、1011Rの先端が上昇する場面について説明する。
この場面では、左右一対のホッパー部1011L、1011Rの先端が開いたままの状態で上昇過程にあり、ホルダー保持枠1013の左側面においてカム取り付けピン1533を介して固定されたスクレーパ用カム1530も同様に上昇する。
即ち、スクレーパ用カム1530が、ホッパー第1位置T1aに対応するカム第1位置1530aまで上昇したときに、スクレーパ用カム1530の先端部が、標準位置に位置しているスクレーパアーム1520のスクレーパ用ローラ1540の下端面の後側に当接することにより、スクレーパ用ローラ1540が前方側に移動させられると共に、スクレーパアーム1520が前方側(図18の矢印S参照)に移動を開始する。
また、そこから更に左右一対のホッパー部1011L、1011Rの先端がほぼ垂直方向に上昇するに伴ってスクレーパ用カム1530も上昇する。スクレーパ用カム1530が上昇することにより、スクレーパ用ローラ1540は、スクレーパ用カム1530の上端側の第1縁部1531上を移動するが、第1縁部1531は、ほぼ垂直の端面を有しているので、スクレーパアーム1520、及びスクレーパ1510は、前後方向に移動することなく同じ位置に留まっている。
これにより、同じ位置に留まっているスクレーパ1510の先端部1511(図17参照)が、上昇中の左右一対のホッパー部1011L、1011Rの後V字切り欠き部1200Bに進入すると共に、スクレーパ1510の両端部1512の前端側が左右一対のホッパー部1011L、1011Rの外壁面をスクレープする。
(2)第2植付具2011が更に上昇を続け、左右一対のホッパー部1011L、1011Rの先端が軌跡T1上のホッパー第2位置T1bに移動する場面について説明する。
この場面では、左右一対のホッパー部1011L、1011Rの先端が開いたままの状態で上昇過程にあり、スクレーパ用カム1530も同様に上昇する。
即ち、スクレーパ用カム1530が、ホッパー第2位置T1bに対応するカム第2位置1530bまで上昇するにつれて、スクレーパ用カム1530の第2縁部1532の円弧状の端面が、スクレーパ用ローラ1540の後端面に当接しながら、更にスクレーパ用ローラ1540を前方側に移動させる。
これと同時に、スクレーパアーム1520が更に前方側(図18の矢印S参照)に移動すると共に、スクレーパ1510が、左右一対のホッパー部1011L、1011Rの後側の隙間から内部に進入する。
(3)そして、第2植付具2011が更に上昇し、左右一対のホッパー部1011L、1011Rの先端が、軌跡T1上のホッパー第2位置T1bから軌跡T1上のホッパー第3位置T1cに到達するまでの過程におけるスクレーパ1510の動作について説明する。
この過程では、スクレーパ用カム1530が、ホッパー第2位置T1bに対応するカム第2位置1530bからホッパー第3位置T1cに対応するカム第3位置1530cに到達するまで上昇するにつれて、スクレーパ用カム1530の第2縁部1532の側面視で比較的カーブの緩やかな円弧状の面が、スクレーパ用ローラ1540の後端面に当接しながら上昇することにより、スクレーパ1510は、図18に示す通り、少しだけ前方に移動すると共に、左右一対のホッパー部1011L、1011Rの内部においてほぼ同じ高さを維持する。
しかし、第2植付具2011は上昇移動を続けているので、スクレーパ1510の先端部1511及び両端部1512は、左右一対のホッパー部1011L、1011Rの内壁面に付着した泥等を効果的にこそぎ落とすことが出来る。
(4)そして、第2植付具2011が更に上昇し、左右一対のホッパー部1011L、1011Rの先端が、軌跡T1上のホッパー第3位置T1cを通過すると、スクレーパ用カム1530が、ホッパー第3位置T1cに対応するカム第3位置1530cにおいて、スクレーパ用ローラ1540の上方に移動する。これにより、スクレーパ用ローラ1540は、スクレーパ用カム1530による当接から開放されて、スクレーパアーム引っ張りスプリング1550の収縮力により、一気にスクレーパアーム1520が後方に移動すると共に、スクレーパ1510が左右一対のホッパー部1011L、1011Rの内部から抜け出して、苗タンクフレーム101に当たることで停止する。このとき、衝撃吸収用ストッパー(図示省略)が、停止時の衝撃を吸収する。
その後、第2植付具2011は、上死点近傍で左右一対のホッパー部1011L、1011Rの先端側を閉じて、軌跡T1上を移動し、上記(1)〜(4)の動作を繰り返す。
これにより、狭いスペースにスクレーパ1510を含むスクレーパ装置1500を収めることが出来、機体のコンパクト化が図れると共に、スクレーパ1510の前後移動量を確保出来、左右一対のホッパー部1011L、1011Rの外面、及び内面を的確にスクレープ出来る。
(実施の形態3)
本実施の形態3では、本発明の移植機の一実施の形態の更に別の苗移植機について、図19〜図24を用いて説明する。
尚、本実施の形態では、上記実施の形態1の苗移植機1と基本的に同じ構成には同じ符号を付してその説明を省略し、相違点を中心に説明する。
即ち、本実施の形態3の苗移植機は、上記実施の形態の苗移植機の左右一対の後輪3に代えて、左右一対のクローラ走行装置を備えた点が、上記実施の形態の苗移植機と相違する。
まず、本実施の形態の苗移植機1のクローラ走行装置500について、図19を用いて説明する。
図19は、本実施の形態の苗移植機1の植付作業姿勢における、左側のクローラ走行装置500と、左側の走行伝動ケース60と、左側の従動前輪2とを示す概略側面図である。
本実施の形態の苗移植機1の右側のクローラ走行装置500と右側の走行伝動ケース60と右側の従動前輪2は、左側のクローラ走行装置500と左側の走行伝動ケース60と左側の従動前輪2と、それぞれ同じ構成であるので、その説明を省略する。
走行伝動ケース60は、上述した通り、入力軸61を回動中心として回動可能に構成されており、エンジン12からの回転駆動力が入力軸61に入力されて、所定の減速比により減速されて出力軸62に伝達される構成である。
出力軸62は、走行伝動ケース60から外側に向けて突き出しており、その先端側には、クローラ走行装置500の駆動輪510が取り付けられている。
クローラ走行装置500は、図19に示す通り、駆動輪510と、従動転輪520と、第1遊転輪531及び第2遊転輪532と、これら駆動輪510と従動転輪520と第1遊転輪531と第2遊転輪532の外側縁部に巻き掛けられた、外周面に複数の突起が一体形成された合成ゴム製のクローラ540とを有している。
また、駆動輪510には、スプロケットブレーキ511が設けられており、左右の操縦ハンドル8にそれぞれ設けられたサイドクラッチレバー85の操作に連動して、駆動輪510との摩擦力を利用して駆動輪510を停止させる構成である。
尚、右側の操縦ハンドル8に設けられたサイドクラッチレバー85には、右側の走行伝動ケース60の入力軸61への駆動力の入切を行う為のサイドクラッチケーブル(図示省略)と、右側の走行伝動ケース60の出力軸62に取り付けられた駆動輪510に設けられたスプロケットブレーキ511の入切を行う為のスプロケットブレーキ用ケーブル(図示省略)とが、連結されている。
左側の操縦ハンドル8に設けられたサイドクラッチレバー85についても、上記と同様の構成である。
これにより、左右の何れか一方のサイドクラッチレバー85を操作することで、操作した側の駆動輪510への駆動力の伝達が「切」状態になると共に、駆動輪の惰性による回動が制動される為、操作した側のクローラ540を的確に制動出来て、走行車体15の小回り旋回が実現出来る。
また、クローラ走行装置500は、図19に示す通り、従動転輪520を走行伝動ケース60に対して前後方向にスライド移動可能に固定する為の走行伝動ケース側支持プレート550及び従動転輪支持プレート560と、従動転輪支持プレート560に対し支持ピン571を介して揺動自在に連結されると共に第1遊転輪531及び第2遊転輪532を支持する遊転輪支持プレート570とを有している。
また、図19に示す通り、遊転輪支持プレート570の右上端側と、従動転輪支持プレート560の右下端部との間には、圧縮スプリング572が設けられている。
これにより、走行伝動ケース60ひいてはクローラ540の下動に伴い、苗移植機1がリフトアップすると、圧縮スプリング572が、後方側に配置された第2遊転輪532をクローラ接地面540aに向けて押すため、接地荷重を後方の第2遊転輪532が主に受けることになり、前輪2とクローラ540との接地荷重の変化を少なくすることができる。
また、図19に示す通り、遊転輪支持プレート570が揺動自在に連結された支持ピン571の地面からの高さと、走行伝動ケース60の回動支点としての入力軸61の地面からの高さが、近いため、走行伝動ケース60ひいてはクローラ540の上下動におけるクローラ540の接地位置の前後変化が少なくなり、前輪2とクローラ540との接地荷重の変化が少なくなる。
また、走行伝動ケース側支持プレート550の前端部は走行伝動ケース60の後端部に直接固定されており、中央部及び後端部において貫通孔(図示省略)が2つ設けられている。
これに対して、従動転輪支持プレート560の前端側には、上述した走行伝動ケース側支持プレート550に設けられた2つの貫通孔に対応した2つの長穴561が設けられており、当該長穴561側から上記貫通孔に挿入されたボルト562にナット(図示省略)を締め付けることにより、走行伝動ケース側支持プレート550に対して従動転輪支持プレート560が、長穴561の前後の幅の範囲内において前後方向にスライド移動可能に固定される構成である。
また、本実施の形態の苗移植機1では、従動前輪2とクローラ走行装置500のクローラ接地面540aが水平面に接地した状態で、入力軸61を中心とした走行伝動ケース60の植付作業中における回動の範囲内においては、側面視で、2つの長穴561は、従動転輪520の従動転輪軸521よりも下側に位置し、且つ、第1遊転輪531の第1遊転輪軸531a及び第2遊転輪532の第2遊転輪軸532aよりも上側に位置する(図19参照)。
これにより、クローラ540の張圧の調節が容易に行える。
また、上記構成により、昇降操作レバー81の切り替え操作や、植付作業中におけるセンサ板71の上下動に応じて、油圧昇降シリンダ10が伸縮し、走行伝動ケース60が入力軸61を回動中心として反時計回りに回動すると、クローラ走行装置500は、クローラ接地面540aを水平状態に保持したまま上方に向けて移動するので車高は低くなる。
一方、走行伝動ケース60が入力軸61を回動中心として時計回りに回動すると、クローラ走行装置500は、クローラ接地面540aを水平状態に保持したまま下方に向けて移動するので車高は高くなる。
尚、エンジン4の下方に設けられた従動前輪支持ステー210の左右両端部に左右従動前輪支持ロッド211が高さ調節可能に取り付けられ、左右従動前輪支持ロッド211の下端部に各々従動前輪2が回動自在に取り付けられている。
また、本実施の形態の苗移植機1では、従動前輪2とクローラ接地面540aが水平面に接地した状態で、入力軸61を中心とした走行伝動ケース60の植付作業中における回動の範囲内においては、側面視で、従動転輪520の従動転輪軸521は、出力軸62よりも上側に位置し、且つ、第1遊転輪軸531aと第2遊転輪軸532aは、出力軸62よりも下側に位置する(図19参照)。
また、本実施の形態の苗移植機1では、従動前輪2とクローラ接地面540aが水平面に接地した状態で、側面視で入力軸61よりも出力軸62が高位となる構成である。
これにより、走行伝動ケース60の入力軸61と、クローラ接地面540aとの高低差が小さくなるので、植付作業中における走行伝動ケース60の矢印A方向への回動でクローラ走行装置500が上下動することによるクローラ接地部540aの前後移動を抑えることが出来る。
また、走行伝動ケース60において入力軸61と出力軸62を個別に設けて、出力軸62に駆動輪510を取り付けたことにより、駆動輪510と後部の第2遊転輪532との距離を短く出来、クローラ走行装置500の前後幅Wを短くすることが出来る。
また、本実施の形態の苗移植機1では、従動前輪2とクローラ接地面540aが水平面に接地した状態で、入力軸61を中心とした走行伝動ケース60の植付作業中における回動の範囲内においては、側面視で、第1遊転輪軸531aと第2遊転輪軸532aの前後方向における中間位置よりも前側に従動転輪軸521が配置されている(図19参照)。
これにより、クローラ走行装置500をコンパクトに構成出来、クローラ走行装置500の上下動で他の部材(例えば、苗タンク)に干渉しないように出来る。
尚、上記実施の形態では、従動転輪520を走行伝動ケース60に対して前後方向にスライド移動可能に固定する構成について説明したが、この構成に加えて、図20に示す通り、第2クローラ走行装置2500を第2走行伝動ケース360に対して左右方向にスライド移動可能な構成としても良い。図20は、左側の第2クローラ走行装置2500を左側の第2走行伝動ケース360に対して左右方向にスライド移動可能な構成とした場合の連結部の概略斜視図である。ここで、上記実施の形態と同じ構成要素には同じ符号を付し、その説明を省略する。また、右側の第2クローラ走行装置(図示省略)は、左側の第2クローラ走行装置2500と同じ構成であるので、その説明を省略する。
図20に示す構成例では、第2走行伝動ケース360の側面の前後方向における中央位置から外側に向けて出力軸62が突き出しており、当該出力軸62の前側に配置された入力軸61と同軸の位置において第2走行伝動ケース360の側面から外側に向けて前側スライド軸361が出力軸62と平行に突き出して溶接固定されていると共に、当該出力軸62の後側において第2走行伝動ケース360の側面から外側に向けて後側スライド軸362が出力軸62と平行に突き出して溶接固定されている。
一方、第2クローラ走行装置2500には、上記実施の形態の走行伝動ケース60の後端部に直接固定された走行伝動ケース側支持プレート550に代えて、第2走行伝動ケース側支持プレート2550が設けられている。
また、第2走行伝動ケース側支持プレート2550には、第2走行伝動ケース360に対して、前側スライド軸361及び後側スライド軸362を介してスライド移動可能に連結する為の前側パイプ部材2551及び後側パイプ部材2552と、出力軸62を貫通させる為の中央パイプ部材2553とが連結されている。
即ち、後側パイプ部材2552が第2走行伝動ケース側支持プレート2550の前端部に貫通固定されており、後側パイプ部材2552には後固定板2554Bを介して中央パイプ部材2553が連結固定されており、中央パイプ部材2553には前固定板2554Fを介して前側パイプ部材2551が連結固定されている。
第2走行伝動ケース側支持プレート2550に、従動転輪支持プレート560に設けられた2つの長穴561に対応した2つの貫通孔(図示省略)が設けられている点は、上記実施の形態の走行伝動ケース側支持プレート550と同じである。
図20に示す構成により、作業者が、苗移植機1の左側の第2クローラ走行装置2500及び右側の第2クローラ走行装置(図示省略)のトレッド調節を行う場合、前側パイプ部材2551及び後側パイプ部材2552と、前側スライド軸361及び後側スライド軸362とを互いに嵌合挿入しスライド移動して所望の位置に位置決めした後、ボルト2555で固定する。そして、中央パイプ部材2553の外側の開口部2553aから突き出している出力軸62に駆動輪510をボルト(図示省略)で固定する。これにより、クローラ540の左右方向の位置調節が行える。また、左右方向の位置調節を行っても、出力軸62からクローラ540への駆動力の伝動を的確に行える。尚、左右の従動前輪2についても、トレッド調節を適宜行う。
また、図20に示す構成では、第2走行伝動ケース360の上端面には潤滑油を給油するための給油口90が設けられており、当該給油口90には給油キャップ91が着脱自在に設けられている。更に、第2走行伝動ケース360の前側の端面であって、通常の植付作業における第2走行伝動ケース360の回動範囲において上下動する位置に、潤滑油を排出するための排油口92が設けられており、当該排油口92には排油キャップ93が着脱自在に設けられている。これにより、排油口92は、通常作業の姿勢(通常の植付作業における第2走行伝動ケース360の回動範囲)において、潤滑油の油面が排油口92まで満たされているか否か、即ち、油面が適正状態にあるか否かを確認するための油面確認用孔(検油口)として兼用出来る。尚、第2走行伝動ケース360内の潤滑油を排油口92から排出する際は、第2走行伝動ケース360を回動範囲において最上動位置(走行車体15を最も下降させた状態)にし、第2走行伝動ケース360において排油口92を下位にして行う。尚、必要に応じて、連結ロッド9aと第2走行伝動ケース360(スイングアーム63a)との連結を外し、作業者が第2走行伝動ケース360を持ち上げる等して第2走行伝動ケース360の最下部に排油口92が位置するようにしてもよい。
次に、図21〜図22を用いて、作業者が操縦ハンドル8を押し下げて、従動前輪2と走行伝動ケース60とを上昇させることにより、苗移植機1をリフトアップさせる際に、操縦ハンドル8を押し下げる為に必要な力を軽減出来る構成について説明する。
図21は、本実施の形態の第3クローラ走行装置3500の概略左側面図である。また、図22は、図21の第3クローラ走行装置3500を備えた苗移植機1を最大高さまでリフトアップさせときの第3クローラ走行装置3500の状態を示す概略左側面図である。
尚、本実施の形態では、図19で説明したクローラ走行装置500と基本的に同じ構成には同じ符号を付してその説明を省略し、相違点を中心に説明する。
即ち、図21に示す第3クローラ走行装置3500には、従動転輪支持プレート560に対して、回動支点563を中心として、後述する死点越えに必要な所定範囲内での回動が可能なスプリングステー564が取り付けられている。
また、図21に示す第3クローラ走行装置3500には、一端591がスプリングステー564に連結され、他端592が遊転輪支持プレート570に連結された死点越え用引っ張りばね590が設けられている。
死点越え用引っ張りばね590の一端591及び他端592は、作業者が苗移植機1を最大高さまでリフトアップさせる際、図22に示す通り、死点越え用引っ張りばね590が、支持ピン571の軸芯に関して死点越えすると同時に、スプリングステー564の回動支点563に関して死点越えする位置に連結されている。
これにより、作業者が苗移植機1を最大高さまでリフトアップさせる際(図22参照)、操縦ハンドル8を押し下げる為に必要な力を軽減することが出来る。
尚、図21、図22に示した構成では、スプリングステー564も回動支点563に関して死点越えする場合について説明したが、これに限らず例えば、スプリングステー564を備えず、死点越え用引っ張りばね590の一端591が、従動転輪支持プレート560に対して直接に連結された構成であってもよい。この場合でも、作業者が苗移植機1を最大高さまでリフトアップさせる際、操縦ハンドル8の押し下げをアシストする。
また、図19〜図22に示した構成では、走行伝動ケース60が入力軸61を中心として回動可能であり、且つ、出力軸62にクローラ走行装置の駆動輪510が取り付けられている場合について説明したが、これに限らず例えば、入力軸61が出力軸62を兼ねた入出力軸を備えた構成であっても良い。即ち、この場合、クローラ走行装置は、入出力軸を中心として回動可能であり、且つ、入出力軸にクローラ走行装置の駆動輪が取り付けられる。
尚、本実施の形態の第1遊転輪531と第2遊転輪532は、本発明の転輪の一例にあたる。また、本実施の形態の出力軸62は、本発明の駆動輪の軸芯の一例にあたる。また、本実施の形態の従動転輪支持プレート560は、本発明の第1部材の一例にあたり、本実施の形態の遊転輪支持プレート570は、本発明の第2部材の一例にあたる。また、本実施の形態の死点越え用引っ張りばね590は、本発明の引っ張りスプリングの一例にあたる。また、本実施の形態の支持ピン571の軸芯は、本発明の揺動支点の一例にあたる。
尚、上記実施の形態では、従動転輪軸521を一つ備えた場合について説明したが、これに限らず例えば、従動輪軸を二つ又はそれ以上設けることにより、従動輪を二つ又はそれ以上設けた構成であっても良い。
また、上記実施の形態では、第1遊転輪軸531aと第2遊転輪軸532aを備えた場合について説明したが、これに限らず例えば、遊転輪軸を三つ又はそれ以上設けることにより、遊転輪を三つ又はそれ以上設けた構成であっても良い。
また、上記実施の形態では、走行伝動ケース側支持プレート550に対して従動転輪支持プレート560が長穴561を介して連結固定され、更に従動転輪支持プレート560に対して遊転輪支持プレート570が支持ピン571を介して回動自在に連結された構成について説明したが、これに限らず例えば、走行伝動ケースが後方に長く伸びた形状を成しており、その走行伝動ケースの後端部に設けられた出力軸にクローラ走行装置の駆動輪が取り付けられていると共に、その出力軸を中心として回動自在に連結された別の遊転輪支持プレートにより複数の遊転輪が支持され、これら駆動輪と複数の遊転輪との外側にクローラが巻き掛けられている構成であっても良い。
また、上記実施の形態に限らず例えば、図23に示す第4クローラ走行装置4500では、第1遊転輪531と第2遊転輪532の支持ピン571を揺動フレーム810に取付け、揺動フレーム810は、走行車体15の下端部15a(図19参照)に先端が回動自在に連結されたロッド820と、走行伝動ケース60に先端部が固定されたクローラフレーム830とによりリンク構造を成していても良い。リンク構造を成すことで、走行伝動ケース60の入力軸61を中心とした回動に伴ったクローラフレーム830の上下回動に合わせて、第1遊転輪531と第2遊転輪532の支持ピン571の位置を変えられる。
図23は、第4クローラ走行装置4500の構成を示す概略左側面図である。
更にまた、図23に示す通り、クローラフレーム830の揺動フレーム810側の第1回動支点830aと、ロッド820の揺動フレーム810側の第2回動支点820aとの第1支点間距離Laは、入力軸61の軸芯、即ちクローラフレーム830の第3回動支点830bと、ロッド820の走行車体15の下端部15a側の第4回動支点820bとの第2支点間距離Lbより狭く構成されていても良い。これにより、苗移植機1がリフトアップする際に、第1遊転輪531と第2遊転輪532の支持ピン571の位置が後方へ移動するため、前後輪バランスの変化が少ない。
また、上記実施の形態に限らず例えば、図24(a)に示す第5クローラ走行装置5500では、従動転輪520を回動自在に取り付けられた第2従動転輪支持プレート1560と、第1遊転輪531と第2遊転輪532が回動可能に取り付けられた第2遊転輪支持プレート1570との取り付けを、ラックとピニオンギヤを用いた構成であっても良い。
図24(a)は、第5クローラ走行装置5500の構成を示す概略左側面図であり、図24(b)は、数式を説明するための説明図である。尚、図24(a)、図24(b)におけるαは、駆動輪510の回動中心を通る水平線512を基準として、駆動輪510の回動中心とクローラ接地面540aの前後方向の中央位置の中央接地点540a1とを結ぶ補助線513との間の角度である。また、図24(b)におけるO点は、駆動輪510の回動中心に対応し、Pα点は、第5クローラ走行装置5500が角度θだけリフトアップしていない状態での中央接地点540a1に対応する。また、Pθ点は、第5クローラ走行装置5500が角度θだけリフトアップした時の中央接地点540a1に対応する。また、O点とPα点との距離はLであり、O点とPθ点との距離はLであるとする。
即ち、図24(a)に示す通り、第2従動転輪支持プレート1560の下端縁部には、ラック部1565が形成されており、また、第2遊転輪支持プレート1570の上端縁部には、ラック部1565と噛み合う位置にピニオンギヤ部1575が形成されている。ピニオンギヤ部1575のギヤの歯先は、第2遊転輪支持プレート1570上に立設された第2支持ピン1571を中心とした半径Rの円弧上に配置されている。また、第2従動転輪支持プレート1560のラック部1565には、第2遊転輪支持プレート1570を移動可能に支持する長孔1566aが形成された支持プレート1566が固定されている。
長孔1566aには第2支持ピン1571がスライド移動可能に挿入されて、抜け防止ピン(図示省略)が先端部に装着されている。
また、ピニオンギヤ部1575のギヤの歯先の半径Rは、第2従動転輪支持プレート1560がリフトアップした時のクローラ接地面540aの前後方向の中央接地点540a1の前後ずれ量と、第1遊転輪531と第2遊転輪532が回動した時の前後補正量が、同じになる様に設定されている。
即ち、この構成によれば、第2従動転輪支持プレート1560がリフトアップした場合、ラック部1565とピニオンギヤ部1575との噛み合い部が後方へ移動するため、第1遊転輪531と第2遊転輪532は後方へ移動する。そして、この後方への移動量(補正量L2)と、クローラ接地面540aの中央接地点540a1の前方への移動量(ずれ量L1)が一致するので、第2従動転輪支持プレート1560がリフトアップしても、クローラ接地面540aの中央接地点540a1の位置は変わらない。
ここで、図24(b)を参照しながら、ピニオンギヤ部1575のギヤの歯先の半径Rの設定の仕方について、数式を用いて説明する。
第5クローラ走行装置5500が角度θだけリフトアップした場合、即ち、第2従動転輪支持プレート1560が角度θだけリフトアップした場合の、クローラ接地面540aの前後方向の中央接地点540a1のずれ量L1(図24(b)参照)は、次式(1)で表される。
L1=Lcosα−Lcos(α+θ) ・・・・・・・・・・・(式1)
一方、ラック部1565とピニオンギヤ部1575との噛み合い部が後方へ移動することによる補正量L2は、次式(2)で表される。
L2≒2πRθ/360 ・・・・・・・・・・・・・・・・・・(式2)
ここで、次式(3)が成り立てば、中央接地点540a1のずれ量が小さくなるか、若しくはゼロになる。
L1=L2 ・・・・・・・・・・・・・・・・・・・・・・・・(式3)
そこで、(式1)〜(式3)に基づいて、次式(4)を得る。
Lcosα−Lcos(α+θ)=2πRθ/360 ・・・・・(式4)
(式4)をRについて解くと、次式(5)が得られる。
R=(Lcosα−Lcos(α+θ))360/2πθ・・・・(式5)
上記(式5)により、半径Rが設定出来る。
尚、上記実施の形態では、図20を用いて、作業者が、苗移植機1の左側の第2クローラ走行装置2500及び右側の第2クローラ走行装置(図示省略)のトレッド調節を行う場合、前側パイプ部材2551及び後側パイプ部材2552と、前側スライド軸361及び後側スライド軸362とを互いに嵌合挿入しスライド移動して所望の位置に位置決めした後、ボルト2555で固定する構成について説明した。ここでは、第2クローラ走行装置2500の側面から、ボルト2555を締め付けたり緩めたりする作業を容易に行える様にするために、側面視で、第2走行伝動ケース側支持プレート2550を逆への字形状に屈曲させた構成とする。これにより、ボルト2555が側面側から見えるので、容易に作業が行える。
また、上記実施の形態では、従動転輪520、第1遊転輪531、第2遊転輪532(図19参照)は、従来と同様の構成である場合について説明したが、これに限らず例えば、図25(a)、図25(b)に示す構成であっても良い。図25(a)は、上記実施の形態で説明したクローラ走行装置に適用可能な改良型転輪6500の斜視図であり、図25(b)は、改良型転輪6500がクローラ走行装置に装着された状態を示す概略側面図である。
即ち、図25(a)に示す通り、改良型転輪6500は、外形が円形で、その中央に回動軸を挿入固定する為の貫通孔6511が形成された転輪プレート6510の円周部に沿って8本のピン部材6512が等間隔に後付けで立設されて構成されている。これにより、改良型転輪6500は従来の転輪に比べて軽量化が図れる。
また、8本のピン部材6512は、クローラ540の内周面に連続的に形成された山型の凸部541の谷間542に確実に嵌り込む構成である。換言すれば、山型の凸部541が隣接するピン部材6512の間に確実に嵌り込む構成である。これにより、クローラ540が駆動輪510(図19参照)により回動すると、山型の凸部541が前方向又は後方向に移動するので、改良型転輪6500は、滑ることなく確実に回動する。
また、上記実施の形態では、植付具11を上下揺動させる苗植付装置300について主として図10を用いて説明したが、これに限らず例えば、図26に示す第2苗植付装置1700により、苗植付装置300の場合と同様、植付具11を上下揺動及び前後動させる構成であっても良い。
ここで、図26は、第2苗植付装置1700の概略構成を示す左側面図である。上記実施の形態で説明した構成と基本的に同じ機能を備えた構成要素には同じ符号を付し、その説明を省略する。
即ち、第2苗植付装置1700は、図26に示す通り、植付具11と、植付具11の先端を静止軌跡において、上下及び前後方向に移動させる第2上下動機構1710とを備えている(図1の軌跡T1参照)。
また、第2上下動機構1710は、上側リンク1720と、下側リンク1730と、連結部材1740と、上下動アーム駆動軸440(図10参照)に奥側からそれぞれ連結固定された第1カム1750及び第2カム1760と、を備えている。
上側リンク1720は、その前端部が、上側リンク回動軸1721を介して、苗植付装置駆動機構400を収納したケーシング401(図10参照)の左側面上側に回動自在に取り付けられている。また、下側リンク1730は、その前端部が、下側リンク回動軸1731を介して、苗植付装置駆動機構400を収納したケーシング401(図10参照)の左側面下側に回動自在に取り付けられている。
また、連結部材1740は、その上端部が、上側連結軸1741を介して、上側リンク1720の後端部に対して回動自在に連結されている。また、連結部材1740の下端部に設けられた略円弧状の長孔1742に対しては、下側リンク1730の後端部に立設された連結ピン1732が挿入されて、略前後方向にスライド可能に連結されている。
尚、図26では、長孔1742が連結部材1740側に形成されている構成について説明しているが、これに限らず例えば、長孔1742が、下側リンク1730の後端部に形成されており、連結部材1740の下端部に、連結ピン1732が立設された構成であっても良い。
また、連結部材1740には、植付具11が固定されている。
また、上側リンク1720の途中には上側ローラ1722が回動可能に取り付けられており、上側ローラ1722は、第2カム1760の外周面に常に当接しながら回動する構成である。また、下側リンク1730の途中には下側ローラ1733が回動可能に取り付けられており、下側ローラ1733は、第1カム1750の外周面に常に当接しながら回動する構成である。
また、上側リンク1720と下側リンク1730は、下側リンク引っ張りバネ1770により連結されており、上側リンク1720と下側リンク1730との間隔が狭くなる側に付勢する構成である。
また、植付具11の左側ホッパー部1011L及び右側ホッパー部1011Rの先端側には、図26に示す通り、左右一対の鍔部材1780がそれぞれ取り付けられている。
上記構成により、上下動アーム駆動軸440に形状の異なる第1カム1750及び第2カム1760を固定することにより、一軸で、上側リンク1720及び下側リンク1730を上下動させることが出来る。
また、第1カム1750又は第2カム1760の形状を変えることで、軌跡T1を自由に変えられる。
また、上記構成により、異なる2つのカムにより上側リンク1720及び下側リンク1730を強制的に上下動させる構成であるので、高速植付でも確実に上側リンク1720及び下側リンク1730を上下動させることが出来る。また、高速植付の場合であっても、従来に比べてトルクが無駄にならない。
また、第1カム1750と第2カム1760との外形状を異ならせることで、上側リンク1720と下側リンク1730の間隔を変え、長孔1742をスライドさせることで、植付具11を前後動させることが出来る。
また、長孔1742を設けたことにより、植付作業時に過負荷がかかると、長孔1742をスライドさせて逃げることが出来る。
また、植付動作の停止位置からの動き始めにおいて、植付具11が固定されている連結部材1740の下端部が、長孔1742を介して下側リンク1730と連結されているため、下側リンク1730に完全に連結されている場合に比べて衝撃が少ない。
また、上記構成によれば、植付具11が下降する際に、長孔1742をスライドさせることで、植付具11を後方に振ることが出来る。
これにより、基本軌跡(静軌跡)が円弧のため、下がり工程のみ後に振れば動軌跡の下側はV字形状となる。
また、植付具11が下降する際は、長孔1742をしながら下側リンク引っ張りバネ1770を引っ張ることで、植付具11や下側リンク1730等の重さを支え、上昇する際は、植付具11や下側リンク1730等の上昇をアシストする。
また、左側ホッパー部1011L及び右側ホッパー部1011Rの先端側に鍔部材1780が取り付けられていることにより、鍔部材1780が畝Uの表面に当たると、長孔1742がスライドし、植付具11が下降しないため、植付深さが一定になる。
また、長孔1742によるホッパーの先端部の後方向への動き量を、植付作業時の走行速度と同じにすることで、鍔部材1780を用いて植付具11の下降を止めても、畝Uに突入したホッパーの先端を引きずらない。
尚、上記実施の形態の苗移植機1において、主として図14を用いて説明した植付深さ調整機構700に含まれる、苗22の植付深さを一定に保つためのセンサ板710(図14参照)の前方に、苗移植機1が実際に進行した距離を検知するための接地ローラ(図示省略)を設けても良い。この場合、接地ローラの回動軸を左右両端側で支持する左右一対の支持アームを上方に向けて配置し、それら左右一対の支持アームの上部内側の側面に、接地ローラの落ちすぎを防止する突起を対向配置しても良い。これら対向配置された突起は、深さアーム720(図14参照)の前後方向に延びるアーム部の上端縁部又はセンサ板710に上側から当接することで、接地ローラの落ちすぎを防止する構成である。
また、上記接地ローラの上方から接地ローラの表面に水を灌水する構成としても良い。
これにより、畝Uに予めマルチフィルムが敷かれている場合でも、接地ローラがマルチフィルムの表面で滑り難くなり、苗移植機1が実際に進行した距離を確実に検知することが出来る。
また、上記の場合、接地ローラに水を当てる位置は、接地ローラの中心軸に向かって高圧で水を当てる構成としても良い。これにより、接地ローラに付着した泥を落とすと共に、マルチフィルムの表面での接地ローラのグリップ力(滑り難くさ)を回復することが出来る。
また、水を当てる部位は、接地ローラの中心軸よりわずかに前寄りとする構成であっても良い。これにより、接地ローラの回転をアシストする。
また、円筒状の接地ローラの全周面に、側面視で、円弧状に湾曲した複数の板を等間隔で水車状に配置する構成(露地用)であっても良い。ここで、円弧状の板は、前進方向の回転において、円弧部分が畝面に接する様に配置されている。これにより、接地ローラが土をむかえるような形状であるため、より確実に回転する。
また、上記実施の形態では、駆動輪510にスプロケットブレーキ511が設けられて場合について説明したが、これに限らず例えば、スプロケットブレーキ511が設けられていない構成であっても良い。
また、上記実施の形態では、移植物として、野菜などの苗について説明したが、野菜に限らず、取出装置で取り出して植付具で圃場に植え付ける移植物であればどの様なものであっても良い。
また、上記実施の形態では、作業車両の一例として、エンジン12を搭載し、当該エンジン12からの駆動力をクローラ走行装置500等に伝動する場合について説明したが、これに限らず例えば、エンジンに代えてモータ等を搭載し、当該モータ等からの駆動力を利用する構成であっても良い。
また、上記実施の形態では、作業車両の一例として、従動前輪2とクローラ走行装置を備えた構成について説明したが、これに限らず例えば、従動前輪2を備えずクローラ走行装置のみで走行する構成であっても良い。
また、上記実施の形態では、作業車両の一例として、車輪としての従動前輪2を走行車体15の前側に備え、当該従動前輪2の後側にクローラ走行装置を備えた構成について説明したが、これに限らず例えば、車輪をクローラ走行装置の後側に備え、且つ、当該車輪の前側にクローラ走行装置を備えた構成であっても良い。
また、上記実施の形態では、前V字切り欠き部1200Fを内側から覆う前ガード1210Fと、後V字切り欠き部1200Bを内側から覆う後ガード1210Bとを備えた場合等について説明したが、これに限らず例えば、前V字切り欠き部1200Fを外側から覆う前ガードと、後V字切り欠き部1200Bを外側から覆う後ガードとを備えた構成であっても良いし、或いは、何れか一方のV字切り欠き部を外側から覆い、他方のV字切り欠き部を内側から覆う構成であっても良い。これにより、植付具の左右一対のホッパー部1011Lと1011Rにより形成されるホッパー内の容積を確保出来る。
また、上記実施の形態では、前V字切り欠き部1200Fと後V字切り欠き部1200Bの双方を前ガードと後ガードにより覆う構成について説明したが、これに限らず例えば、前V字切り欠き部1200F又は後V字切り欠き部1200Bの何れか一方を覆う構成であっても良い。
また、上記実施の形態では、左右に二つに分かれたホッパー部の互いに突き合わされる端面部に略V字状の切り欠き部が設けられている場合について説明したが、これに限らず例えば、切り欠き部の形状は、略U字状や略長孔状や略長方形状や略菱形状等どの様な形状であっても良い。
また、上記実施の形態では、左右に二つに分かれたホッパー部の互いに突き合わされる前側の端面部において、右側ホッパー部と左側ホッパー部の両方に切り欠き部が形成されており、且つ、左右に二つに分かれたホッパー部の互いに突き合わされる後側の端面部において、右側ホッパー部と左側ホッパー部の両方に切り欠き部が形成されている場合について説明したが、これに限らず例えば、左右に二つに分かれたホッパー部の互いに突き合わされる前側の端面部において、右側ホッパー部と左側ホッパー部の何れか一方に切り欠き部の一例が形成されており、且つ、左右に二つに分かれたホッパー部の互いに突き合わされる後側の端面部において、右側ホッパー部と左側ホッパー部の何れか一方に切り欠き部の一例が形成された構成であっても良い。また、右側ホッパー部と左側ホッパー部の互いに突き合わされる部位の何れにも、切り欠き部が形成されていない構成であっても良い。
また、上記実施の形態では、左側ホッパー部1011Lと右側ホッパー部1011Rとが互いに突き合わされる前側と後側の端面部において、略V字状の前V字切り欠き部1200Fと、略V字状の後V字切り欠き部1200Bが設けられている構成について説明したが、これに限らず例えば、前側と後側の何れか一方の端面部に略V字状の切り欠き部が設けられている構成であっても良い。
また、上記実施の形態では、植付具が、左右に二つに分かれたホッパー部を備えた場合について説明したが、これに限らず例えば、植付具が前後に二つに分かれたホッパー部を備えた構成であっても良い。
また、上記実施の形態では、取出装置200がトレイ20の育苗ポット21から苗を取り出して、植付具に供給し圃場に植え付ける全自動タイプの苗移植機1について説明したが、これに限らず例えば、回転テーブル上に設けられた複数のポットの内部に、作業者が手で苗を入れて、その苗が、ポットの底側に設けられた蓋の機能を有する部材の開閉により落下して植付具に供給されるタイプの苗移植機についても、本発明は適用可能である。
また、上記実施の形態では、トレイ送りロッド121の戻り動作は、取出部材260が育苗ポット21の内部に突入した後に開始されて、取出部材260が育苗ポット21の内部から抜け出す直前に完了する構成について説明したが、これに限らず例えば、取出部材260が育苗ポット21の内部に突入した後、抜け出すまでの間の何れかの期間で、トレイ送りロッド121の戻り動作が開始され、且つ完了しておりさえすれば良い。
また、上記実施の形態では、植付具11の植付動作を間欠的に行わせる構成について説明したが、これに限らず例えば、一定間隔の株間で苗を植え付ける構成であっても良い。
また、上記実施の形態では、移植物として、野菜などの苗について説明したが、野菜に限らず、取出装置で取り出して植付具で圃場に植え付ける移植物であればどの様なものであっても良い。
また、上記実施の形態では、スクレーパ装置1500のスクレーパ1510が、第2植付具2011の後方に設けられた構成について説明したが、これに限らず例えば、スクレーパ1510は植付具の前方に設けられていても良い。その場合のスクレーパは、例えば、第2植付具2011の前V字切り欠き部1200Fから第2植付具1011の内部に進入させる構成としても良い。
また、上記実施の形態では、スクレーパ装置1500が、第2植付具2011に取り付けられると共に、スクレーパアーム1520と当接可能に配置されたスクレーパ用カム1530が設けられた場合について説明したが、これに限定されるものではなく、要するに、スクレーパは、先端を開きながら上昇する植付具と共にスクレーパアームが作動することで、前側又は後側に移動し植付具の外面をスクレープし、その後、植付具の内側に進入して植付具の内面をスクレープする構成であればどの様な構成であっても良い。
また、上記実施の形態では、押出ロッド281が、位置K3から位置K4(図9参照)の間において、押出位置273a1の手前で少し突き出される構成について説明したが、これに限らず例えば、押出ロッド281が、位置K1から位置K4(図9参照)の間で、押出位置273a1の手前で少し突き出される構成であっても良い。