JP6273937B2 - 路面状況推定装置 - Google Patents
路面状況推定装置 Download PDFInfo
- Publication number
- JP6273937B2 JP6273937B2 JP2014054929A JP2014054929A JP6273937B2 JP 6273937 B2 JP6273937 B2 JP 6273937B2 JP 2014054929 A JP2014054929 A JP 2014054929A JP 2014054929 A JP2014054929 A JP 2014054929A JP 6273937 B2 JP6273937 B2 JP 6273937B2
- Authority
- JP
- Japan
- Prior art keywords
- road surface
- frequency component
- unit
- tire
- power generation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C19/00—Tyre parts or constructions not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/068—Road friction coefficient
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/10—Detection or estimation of road conditions
- B60T2210/12—Friction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Tires In General (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
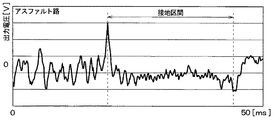
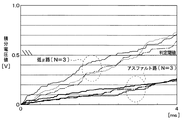
タイヤ側装置は、車両に備えられるタイヤ(3)のトレッド(31)の裏面に取り付けられ、タイヤの振動の大きさに応じた検出信号を出力する振動検出部(11)と、タイヤの1回転中におけるトレッドのうちの振動検出部の配置箇所と対応する部分が接地している接地区間を抽出する接地区間抽出部(17)および接地区間中における検出信号の高周波成分のレベルを算出する高周波レベル算出部(18)とを有する信号処理部(13)と、高周波成分のレベルの算出結果を路面状況が表された路面状況データとして送信する送信機(14)と、を有し、
車両側装置は、送信機から送信された路面状況データを受信する受信機(21)と、路面状況データに基づいて、タイヤの走行路面の路面状況を推定する路面状況推定部(22)と、を有していることを特徴としている。
さらに、請求項1ないし6に記載の発明における路面状況推定装置は、接地区間抽出部は、接地区間の終了時に送信機に送信トリガを送り、送信機は、送信トリガが送られてくると路面状況データの送信を行うことを特徴としている。
このように、送信機によるデータ送信を常に行うのではなく、接地区間の終了時に限定して行うようにしているため、消費電力を低減することが可能となる。
図1〜5を参照して、本実施形態にかかる路面状況推定装置について説明する。本実施形態にかかる路面状況推定装置は、車両の各車輪に備えられるタイヤの接地面における振動に基づいて走行中の路面状況を推定するものとして用いられる。
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。
Claims (6)
- 車両に備えられるタイヤ(3)のトレッド(31)の裏面に取り付けられ、前記タイヤの振動の大きさに応じた検出信号を出力する振動検出部(11)と、前記タイヤの1回転中における前記トレッドのうちの前記振動検出部の配置箇所と対応する部分が接地している接地区間を抽出する接地区間抽出部(17)および前記接地区間中における前記検出信号の高周波成分のレベルを算出する高周波レベル算出部(18)を有する信号処理部(13)と、前記高周波成分のレベルの算出結果を路面状況が表された路面状況データとして送信する送信機(14)と、を有するタイヤ側装置(1)と、
前記送信機から送信された前記路面状況データを受信する受信機(21)と、前記路面状況データに基づいて、前記タイヤの走行路面の路面状況を推定する路面状況推定部(22)と、を有する車両側装置(2)とを備え、
前記接地区間抽出部は、前記接地区間の終了時に前記送信機に送信トリガを送り、前記送信機は、前記送信トリガが送られてくると前記路面状況データの送信を行うことを特徴とする路面状況推定装置。 - 前記高周波レベル算出部は、
前記接地区間中における前記検出信号の高周波成分を抽出する高周波成分抽出手段(181)と、
抽出された前記高周波成分を整流する整流部(182)と、
整流された前記高周波成分を積分する積分部(183)と、を有していることを特徴とする請求項1に記載の路面状態推定装置。 - 前記高周波成分抽出手段は前記検出信号のうち高周波成分を通過させるハイパスフィルタ部であり、
前記整流部は、抽出された前記高周波成分を全波整流する全波整流回路であり、
前記積分部は、整流された前記高周波成分に基づいて充電を行うコンデンサ(183a)であることを特徴とする請求項2に記載の路面状態推定装置。 - 前記接地区間抽出部は、前記トレッドのうちの前記振動検出部の配置箇所と対応する部分の接地開始時に発生する前記高周波成分の第1ピーク値を検出し、該第1ピーク値の検出時に前記積分部による前記高周波成分の積分を開始させることを特徴とする請求項2または3に記載の路面状態推定装置。
- 前記接地区間抽出部は、前記トレッドのうちの前記振動検出部の配置箇所と対応する部分の接地終了時に発生する前記高周波成分の第2ピーク値を検出し、該第2ピーク値の検出時に前記積分部による前記高周波成分の積分を終了させることを特徴とする請求項4に記載の路面状態推定装置。
- 前記接地区間抽出部は、前記トレッドのうちの前記振動検出部の配置箇所と対応する部分の接地開始時から一定期間、前記積分部による前記高周波成分の積分を行わせることを特徴とする請求項2または3に記載の路面状態推定装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054929A JP6273937B2 (ja) | 2014-03-18 | 2014-03-18 | 路面状況推定装置 |
| PCT/JP2015/001394 WO2015141199A1 (ja) | 2014-03-18 | 2015-03-12 | 路面状況推定装置 |
| DE112015001319.9T DE112015001319B4 (de) | 2014-03-18 | 2015-03-12 | Strassenoberflächenzustandsschätzvorrichtung |
| US15/122,218 US10099699B2 (en) | 2014-03-18 | 2015-03-12 | Road surface condition estimation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054929A JP6273937B2 (ja) | 2014-03-18 | 2014-03-18 | 路面状況推定装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015174637A JP2015174637A (ja) | 2015-10-05 |
| JP2015174637A5 JP2015174637A5 (ja) | 2016-04-28 |
| JP6273937B2 true JP6273937B2 (ja) | 2018-02-07 |
Family
ID=54144183
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014054929A Expired - Fee Related JP6273937B2 (ja) | 2014-03-18 | 2014-03-18 | 路面状況推定装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10099699B2 (ja) |
| JP (1) | JP6273937B2 (ja) |
| DE (1) | DE112015001319B4 (ja) |
| WO (1) | WO2015141199A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112014001372T5 (de) | 2013-03-15 | 2015-12-03 | Denso Corporation | Reifenvorrichtung |
| JP6281346B2 (ja) | 2014-03-18 | 2018-02-21 | 株式会社Soken | 路面状況推定装置 |
| JP6330398B2 (ja) | 2014-03-18 | 2018-05-30 | 株式会社Soken | 車両誤発進抑制装置 |
| JP6318743B2 (ja) | 2014-03-18 | 2018-05-09 | 株式会社Soken | タイヤ状態検出装置 |
| JP6318835B2 (ja) | 2014-05-14 | 2018-05-09 | 株式会社デンソー | タイヤ空気圧検出装置 |
| JP6488986B2 (ja) | 2015-10-27 | 2019-03-27 | 株式会社Soken | 路面状況推定装置 |
| JP6365503B2 (ja) * | 2015-10-27 | 2018-08-01 | 株式会社Soken | 路面状況推定装置 |
| JP6558266B2 (ja) | 2016-02-19 | 2019-08-14 | 株式会社デンソー | 車両用危険回避装置 |
| JP6601261B2 (ja) * | 2016-02-23 | 2019-11-06 | 株式会社Soken | 路面状況推定装置 |
| JP2017198507A (ja) * | 2016-04-26 | 2017-11-02 | 株式会社デンソー | 路面状態検出装置 |
| FR3052420B1 (fr) * | 2016-06-14 | 2018-07-06 | Continental Automotive France | Procede de determination de l'etat d'une route |
| JP6544302B2 (ja) * | 2016-06-22 | 2019-07-17 | 株式会社Soken | 路面状況推定装置 |
| JP6551463B2 (ja) * | 2016-07-13 | 2019-07-31 | 株式会社デンソー | タイヤマウントセンサおよびそれを含む路面状態推定装置 |
| JP2018026111A (ja) * | 2016-08-05 | 2018-02-15 | 株式会社デンソー | タイヤマウントセンサおよびチェーン規制管理システム |
| JP6620787B2 (ja) * | 2016-08-11 | 2019-12-18 | 株式会社デンソー | 路面状態推定装置 |
| JP6547793B2 (ja) | 2016-08-12 | 2019-07-24 | 株式会社デンソー | タイヤマウントセンサ、ダイアグ履歴記憶装置およびダイアグ報知装置 |
| JP6614073B2 (ja) | 2016-09-06 | 2019-12-04 | 株式会社デンソー | 路面状態推定装置 |
| DE102017122979A1 (de) * | 2017-10-04 | 2019-04-04 | HELLA GmbH & Co. KGaA | Verfahren zur Erfassung von Feuchtigkeit auf einer Fahrbahn |
| JP6930355B2 (ja) * | 2017-10-11 | 2021-09-01 | 株式会社Soken | 路面状態判別装置およびそれを備えたタイヤシステム |
| JP6946970B2 (ja) * | 2017-11-23 | 2021-10-13 | 株式会社デンソー | 路面状態判別装置 |
| JP6777103B2 (ja) * | 2018-01-19 | 2020-10-28 | 株式会社Soken | 路面状態判別装置およびそれを含むタイヤシステム |
| JP7047466B2 (ja) * | 2018-03-02 | 2022-04-05 | 株式会社Soken | 路面状態判別装置 |
| JP7415380B2 (ja) * | 2019-09-04 | 2024-01-17 | 株式会社Soken | タイヤ側装置およびそれを含む路面状態判別装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4517610B2 (ja) * | 2003-09-16 | 2010-08-04 | トヨタ自動車株式会社 | タイヤ状態量検出装置 |
| JP4127206B2 (ja) * | 2003-12-25 | 2008-07-30 | トヨタ自動車株式会社 | タイヤおよび車輪情報処理装置 |
| JP4349151B2 (ja) * | 2004-02-26 | 2009-10-21 | トヨタ自動車株式会社 | 接触状態取得装置 |
| JP2006142993A (ja) * | 2004-11-19 | 2006-06-08 | Yokohama Rubber Co Ltd:The | 加速度センサ装着タイヤ |
| ES2531079T3 (es) * | 2005-06-17 | 2015-03-10 | Bridgestone Corp | Procedimiento de estimación del estado de la superficie de una carretera, neumático de estimación del estado de la superficie de una carretera, dispositivo de estimación del estado de la superficie de una carretera y dispositivo de control de vehículo |
| JP2008100610A (ja) * | 2006-10-19 | 2008-05-01 | Yokohama Rubber Co Ltd:The | 走行路面状態検出システム及びそのセンサユニット |
| WO2009010082A1 (en) * | 2007-07-18 | 2009-01-22 | Pirelli Tyre S.P.A. | Method and system for determining operating parameters of a tyre during running of a vehicle |
| DE102008041608B4 (de) | 2008-08-27 | 2021-08-12 | Robert Bosch Gmbh | Verfahren zur Detektion von Beschleunigungspeaks in Reifen |
| JP5523023B2 (ja) * | 2009-08-26 | 2014-06-18 | 株式会社ブリヂストン | 路面状態の推定方法とその装置、及び、車両制御方法 |
| JP5657917B2 (ja) | 2010-05-19 | 2015-01-21 | 株式会社ブリヂストン | 路面状態推定方法 |
| JP6033619B2 (ja) | 2012-09-13 | 2016-11-30 | テイ・エス テック株式会社 | 車両用シート |
| JP6281346B2 (ja) | 2014-03-18 | 2018-02-21 | 株式会社Soken | 路面状況推定装置 |
-
2014
- 2014-03-18 JP JP2014054929A patent/JP6273937B2/ja not_active Expired - Fee Related
-
2015
- 2015-03-12 DE DE112015001319.9T patent/DE112015001319B4/de not_active Expired - Fee Related
- 2015-03-12 WO PCT/JP2015/001394 patent/WO2015141199A1/ja active Application Filing
- 2015-03-12 US US15/122,218 patent/US10099699B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015141199A1 (ja) | 2015-09-24 |
| DE112015001319T5 (de) | 2016-12-01 |
| JP2015174637A (ja) | 2015-10-05 |
| US10099699B2 (en) | 2018-10-16 |
| DE112015001319B4 (de) | 2020-07-30 |
| US20160368501A1 (en) | 2016-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6273937B2 (ja) | 路面状況推定装置 | |
| JP6281346B2 (ja) | 路面状況推定装置 | |
| JP6365503B2 (ja) | 路面状況推定装置 | |
| WO2017221578A1 (ja) | 路面状況推定装置 | |
| JP6488986B2 (ja) | 路面状況推定装置 | |
| JP6318743B2 (ja) | タイヤ状態検出装置 | |
| WO2016092824A1 (ja) | 車両制御装置 | |
| US11034356B2 (en) | Tire-mounted sensor and road surface condition estimation apparatus including the same | |
| JP6372214B2 (ja) | タイヤ状態検出装置 | |
| US11142210B2 (en) | Road surface state estimation device | |
| JP6601261B2 (ja) | 路面状況推定装置 | |
| JP6119330B6 (ja) | タイヤ装置 | |
| JP6119330B2 (ja) | タイヤ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6273937 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |