JP6233140B2 - 歩行型耕耘機 - Google Patents
歩行型耕耘機 Download PDFInfo
- Publication number
- JP6233140B2 JP6233140B2 JP2014069232A JP2014069232A JP6233140B2 JP 6233140 B2 JP6233140 B2 JP 6233140B2 JP 2014069232 A JP2014069232 A JP 2014069232A JP 2014069232 A JP2014069232 A JP 2014069232A JP 6233140 B2 JP6233140 B2 JP 6233140B2
- Authority
- JP
- Japan
- Prior art keywords
- support arm
- pin
- recess
- sprocket
- fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B33/00—Tilling implements with rotary driven tools, e.g. in combination with fertiliser distributors or seeders, with grubbing chains, with sloping axles, with driven discs
- A01B33/02—Tilling implements with rotary driven tools, e.g. in combination with fertiliser distributors or seeders, with grubbing chains, with sloping axles, with driven discs with tools on horizontal shaft transverse to direction of travel
- A01B33/028—Tilling implements with rotary driven tools, e.g. in combination with fertiliser distributors or seeders, with grubbing chains, with sloping axles, with driven discs with tools on horizontal shaft transverse to direction of travel of the walk-behind type
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Soil Working Implements (AREA)
- Toys (AREA)
Description
機体フレームと、
前記機体フレームに固定された駆動装置と、
前記駆動装置の後方に配置された操作用ハンドルと、
前記機体フレームに固定され、前記駆動装置からの駆動力により複数の耕耘爪を回動させる耕耘装置と、
前記耕耘装置の後方に配置された抵抗棒と、
前記機体フレームの前方側に回動自在に設けられ、地面に接地する移動用の姿勢と地面から離間する耕耘用の姿勢を切替可能な転輪部と、を備えた歩行型耕耘機であって、
前記転輪部は、
回転車輪と、
一端側で前記回転車輪を回動自在に支持し、他端側で前記機体フレームに対して回動可能に連結された支持アームと、を有し、
前記支持アームの前記他端側には、前記回転車輪の回動軸と平行な支持アームピンが固定されると共に、前記支持アームピンを基準として前記回転車輪と反対側に長孔が設けられており、
前記機体フレームには、
前記支持アームピンと平行であって且つ前記長孔に挿入された固定ピンが固定され、
前記固定ピンから見て前方側に、前記支持アームピンを保持可能で前方斜め上側に向けて開口された第1凹部が形成され、
前記固定ピンから見て下方側に、前記支持アームピンを保持可能で下方斜め前側に向けて開口された第2凹部が形成されており、
前記第2凹部は、側面視で前記第1凹部より下方で且つ後方に位置しており、
前記支持アームピンと前記固定ピンは引っ張りばね部材により連結されており、
前記転輪部が前記移動用の姿勢にあるときは、前記支持アームは、前記引っ張りばね部材の復元力により、前記第2凹部に前記支持アームピンが保持された状態にあり、
前記転輪部が前記耕耘用の姿勢にあるときは、前記支持アームは、前記引っ張りばね部材の復元力により、前記第1凹部に前記支持アームピンが保持された状態にあり、
前記機体フレームの前端部には、機体後方に向かって湾曲する湾曲部が前記第1凹部と前記第2凹部の間にわたって形成されており、且つ、前記湾曲部の一端部と前記第1凹部の間と、前記湾曲部の他端部と前記第2凹部の間にそれぞれ突起部が形成されており、
前記支持アームピンは前記湾曲部に沿って前記第1凹部と前記第2凹部間を移動する構成とすることを特徴とする歩行型耕耘機である。
前記抵抗棒又は前記耕耘爪を地面に接触させた状態から前記接触させた方を支点として前記操作用ハンドルを持ち上げて前記回転車輪が接地した状態から、前記支点が更に前記地面から所定距離持ち上げられた状態までの範囲では、前記移動用の姿勢における前記支持アームピンは、前記固定ピンに対して、前記地面を基準として、前方側に位置しており、
前記抵抗棒及び前記耕耘爪を前記地面に接触させた状態では、前記耕耘用の姿勢における前記支持アームピンは、前記固定ピンに対して、前記地面を基準として、上方側に位置している、ことを特徴とする上記第1の本発明の歩行型耕耘機である。
また、第3の本発明は、
前記耕耘装置は、前記駆動装置からの前記駆動力により前記複数の耕耘爪を回動させるためのミッションケースを有し、
前記ミッションケースは、前記駆動装置からの駆動力を受け取る入力軸と、該入力軸からの駆動力を受けて前記複数の耕耘爪を回転させる出力軸と、前記入力軸の回転方向を正回転のまま出力軸に伝達するか、あるいは逆回転させて前記出力軸に伝達するかの切り替えを行う切り替えクラッチを備え、
該切り替えクラッチは、前記入力軸上のほぼ中央部にスライド可能にスプライン接続されており、該切り替えクラッチのスライド方向の左右両端部には、第1クラッチ爪と第2クラッチ爪を設け、
前記入力軸上の片側には、切り替えクラッチの第1クラッチ爪と連結可能な第1スプロケットを周動自在に配置し、前記入力軸上であって、前記第1スプロケットの反対側に、前記切り替えクラッチの第2クラッチ爪と連結可能な第1ギアを周動自在に配置し、
前記入力軸に平行に中間軸を回動自在に配置し、該中間軸上には、前記第1スプロケットからの駆動力を、第1チェーンを介して受ける第2スプロケットが固定されると共に、前記入力軸上の前記第1ギアからの駆動力を受ける第2ギアが固定され、前記第2スプロケットと前記第2ギアの間には、第3スプロケットが固定され、前記第2スプロケットを介して伝達された正回転の駆動力、又は前記第2ギヤを介して伝達された逆回転の駆動力を、第2チェーンを介して、前記出力軸に固定された第4スプロケットに伝達する構成とする上記第1又は第2の本発明の歩行型耕耘機である。
これにより、軸の回転方向を逆転させることが、2軸で実現出来るので、軽量化や低コスト化が図れる。
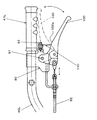
まず、図1、図2を用いて、本実施の形態1の歩行型耕耘機1についてその構成を説明する。
10 機体フレーム
10a 固定ピン
10L 左側の本体プレート
10R 右側の本体プレート
12a 第1凹部
12b 第2凹部
13 湾曲部
14 突起部
15 引っ張りばね部材
20 エンジン
30 燃料タンク
40 操作用ハンドル
50 作業機取り付け部
55 抵抗棒
60 耕耘爪
70 耕耘装置
80 転輪部
81 回転車輪
81a 回動軸
82 支持アーム
82a 支持アームピン
82b 長孔
Claims (3)
- 機体フレームと、
前記機体フレームに固定された駆動装置と、
前記駆動装置の後方に配置された操作用ハンドルと、
前記機体フレームに固定され、前記駆動装置からの駆動力により複数の耕耘爪を回動させる耕耘装置と、
前記耕耘装置の後方に配置された抵抗棒と、
前記機体フレームの前方側に回動自在に設けられ、地面に接地する移動用の姿勢と地面から離間する耕耘用の姿勢を切替可能な転輪部と、を備えた歩行型耕耘機であって、
前記転輪部は、
回転車輪と、
一端側で前記回転車輪を回動自在に支持し、他端側で前記機体フレームに対して回動可能に連結された支持アームと、を有し、
前記支持アームの前記他端側には、前記回転車輪の回動軸と平行な支持アームピンが固定されると共に、前記支持アームピンを基準として前記回転車輪と反対側に長孔が設けられており、
前記機体フレームには、
前記支持アームピンと平行であって且つ前記長孔に挿入された固定ピンが固定され、
前記固定ピンから見て前方側に、前記支持アームピンを保持可能で前方斜め上側に向けて開口された第1凹部が形成され、
前記固定ピンから見て下方側に、前記支持アームピンを保持可能で下方斜め前側に向けて開口された第2凹部が形成されており、
前記第2凹部は、側面視で前記第1凹部より下方で且つ後方に位置しており、
前記支持アームピンと前記固定ピンは引っ張りばね部材により連結されており、
前記転輪部が前記移動用の姿勢にあるときは、前記支持アームは、前記引っ張りばね部材の復元力により、前記第2凹部に前記支持アームピンが保持された状態にあり、
前記転輪部が前記耕耘用の姿勢にあるときは、前記支持アームは、前記引っ張りばね部材の復元力により、前記第1凹部に前記支持アームピンが保持された状態にあり、
前記機体フレームの前端部には、機体後方に向かって湾曲する湾曲部が前記第1凹部と前記第2凹部の間にわたって形成されており、且つ、前記湾曲部の一端部と前記第1凹部の間と、前記湾曲部の他端部と前記第2凹部の間にそれぞれ突起部が形成されており、
前記支持アームピンは前記湾曲部に沿って前記第1凹部と前記第2凹部間を移動する構成とすることを特徴とする歩行型耕耘機。 - 前記抵抗棒又は前記耕耘爪を地面に接触させた状態から前記接触させた方を支点として前記操作用ハンドルを持ち上げて前記回転車輪が接地した状態から、前記支点が更に前記地面から所定距離持ち上げられた状態までの範囲では、前記移動用の姿勢における前記支持アームピンは、前記固定ピンに対して、前記地面を基準として、前方側に位置しており、
前記抵抗棒及び前記耕耘爪を前記地面に接触させた状態では、前記耕耘用の姿勢における前記支持アームピンは、前記固定ピンに対して、前記地面を基準として、上方側に位置している、ことを特徴とする請求項1に記載の歩行型耕耘機。 - 前記耕耘装置は、前記駆動装置からの前記駆動力により前記複数の耕耘爪を回動させるためのミッションケースを有し、
前記ミッションケースは、前記駆動装置からの駆動力を受け取る入力軸と、該入力軸からの駆動力を受けて前記複数の耕耘爪を回転させる出力軸と、前記入力軸の回転方向を正回転のまま出力軸に伝達するか、あるいは逆回転させて前記出力軸に伝達するかの切り替えを行う切り替えクラッチを備え、
該切り替えクラッチは、前記入力軸上のほぼ中央部にスライド可能にスプライン接続されており、該切り替えクラッチのスライド方向の左右両端部には、第1クラッチ爪と第2クラッチ爪を設け、
前記入力軸上の片側には、切り替えクラッチの第1クラッチ爪と連結可能な第1スプロケットを周動自在に配置し、前記入力軸上であって、前記第1スプロケットの反対側に、前記切り替えクラッチの第2クラッチ爪と連結可能な第1ギアを周動自在に配置し、
前記入力軸に平行に中間軸を回動自在に配置し、該中間軸上には、前記第1スプロケットからの駆動力を、第1チェーンを介して受ける第2スプロケットが固定されると共に、前記入力軸上の前記第1ギアからの駆動力を受ける第2ギアが固定され、前記第2スプロケットと前記第2ギアの間には、第3スプロケットが固定され、前記第2スプロケットを介して伝達された正回転の駆動力、又は前記第2ギヤを介して伝達された逆回転の駆動力を、第2チェーンを介して、前記出力軸に固定された第4スプロケットに伝達する構成とする請求項1又は請求項2記載の歩行型耕耘機。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014069232A JP6233140B2 (ja) | 2014-03-28 | 2014-03-28 | 歩行型耕耘機 |
| FR1552576A FR3018992B1 (fr) | 2014-03-28 | 2015-03-26 | Cultivateur pousse |
| CN201520181413.4U CN204721805U (zh) | 2014-03-28 | 2015-03-27 | 步行式耕地机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014069232A JP6233140B2 (ja) | 2014-03-28 | 2014-03-28 | 歩行型耕耘機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015188403A JP2015188403A (ja) | 2015-11-02 |
| JP2015188403A5 JP2015188403A5 (ja) | 2017-02-02 |
| JP6233140B2 true JP6233140B2 (ja) | 2017-11-22 |
Family
ID=54106032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014069232A Active JP6233140B2 (ja) | 2014-03-28 | 2014-03-28 | 歩行型耕耘機 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6233140B2 (ja) |
| CN (1) | CN204721805U (ja) |
| FR (1) | FR3018992B1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6853127B2 (ja) * | 2017-06-28 | 2021-03-31 | 株式会社クボタ | 歩行型作業機 |
| CN107231829B (zh) * | 2017-06-30 | 2019-10-18 | 王良仁 | 一种往复铲式耕整机 |
| JP6840789B2 (ja) * | 2019-06-24 | 2021-03-10 | 株式会社クボタ | 歩行型管理機 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4164983A (en) * | 1978-02-21 | 1979-08-21 | Deere & Company | Walk-behind filler with combined drag stake and wheel |
| JPS58179283U (ja) * | 1982-05-26 | 1983-11-30 | ニユ−デルタ工業株式会社 | 車軸作業形管理機の移動輪 |
| ES2203695T3 (es) * | 1995-05-24 | 2004-04-16 | Yanmar Agricultural Equipment Co., Ltd. | Maquina agricola. |
| JPH09207830A (ja) * | 1996-02-07 | 1997-08-12 | Shigeki Sano | 耕耘機の操作ハンドル取付構造 |
| JP4181097B2 (ja) * | 2004-08-23 | 2008-11-12 | 本田技研工業株式会社 | フロントロータリ作業機 |
| ITRE20070097A1 (it) * | 2007-09-06 | 2009-03-07 | Eurosystems S P A | Attrezzo agricolo perfezionato |
| FR2960382B1 (fr) * | 2010-06-01 | 2012-07-20 | Pubert Henri Sas | Equipement a roue de transport escamotable |
| ITRE20110069A1 (it) * | 2011-09-16 | 2013-03-17 | Eurosystems S P A | Attrezzo agricolo perfezionato |
-
2014
- 2014-03-28 JP JP2014069232A patent/JP6233140B2/ja active Active
-
2015
- 2015-03-26 FR FR1552576A patent/FR3018992B1/fr active Active
- 2015-03-27 CN CN201520181413.4U patent/CN204721805U/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN204721805U (zh) | 2015-10-28 |
| JP2015188403A (ja) | 2015-11-02 |
| FR3018992B1 (fr) | 2019-08-02 |
| FR3018992A1 (ja) | 2015-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6233140B2 (ja) | 歩行型耕耘機 | |
| JP5208078B2 (ja) | 歩行型管理機 | |
| JP2011063224A (ja) | 歩行型管理機 | |
| JP2015188403A5 (ja) | ||
| EP2742786A1 (en) | Tiller | |
| JP4484917B2 (ja) | 歩行型作業機のハンドル構造 | |
| JP6162619B2 (ja) | アームレスト | |
| JP4764285B2 (ja) | 操作レバー装置 | |
| JP2008213729A (ja) | 歩行型作業機におけるクラッチ操作装置 | |
| JP2012065585A (ja) | 歩行型農作業機 | |
| JP6897627B2 (ja) | 歩行型管理機 | |
| JP4718377B2 (ja) | 歩行型作業機のクラッチ操作構造 | |
| JP4764286B2 (ja) | 操作レバー装置 | |
| JP2007166945A (ja) | 移動農機 | |
| JP4489749B2 (ja) | 作業機の操作レバー | |
| JP2005193900A (ja) | ハンドトラクタの操作装置 | |
| JP7499512B2 (ja) | 歩行型作業機 | |
| JP2008062931A (ja) | ハンドトラクタ | |
| JP5466540B2 (ja) | 管理機 | |
| JP4344254B2 (ja) | ストッパ装置 | |
| JP5043703B2 (ja) | 歩行型作業機 | |
| JP2020039299A (ja) | 車軸型電動歩行管理機 | |
| JP2007006739A (ja) | 歩行型作業機 | |
| JPH09290776A (ja) | ハンドトラクタの操作装置 | |
| JP2011186956A (ja) | 作業機の操作レバー |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170630 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170926 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171009 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6233140 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |