JP6211135B1 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP6211135B1 JP6211135B1 JP2016102995A JP2016102995A JP6211135B1 JP 6211135 B1 JP6211135 B1 JP 6211135B1 JP 2016102995 A JP2016102995 A JP 2016102995A JP 2016102995 A JP2016102995 A JP 2016102995A JP 6211135 B1 JP6211135 B1 JP 6211135B1
- Authority
- JP
- Japan
- Prior art keywords
- phase
- motor
- rotation angle
- phase current
- switch element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
- Inverter Devices (AREA)
Abstract
Description
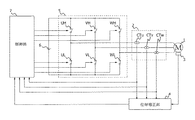
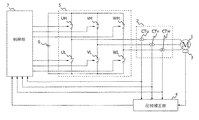
図1は、本発明の実施の形態1に係るモータ制御装置の構成を示したブロック図である。本実施の形態1におけるモータ制御装置は、モータ1、相電流検出部2、回転角度検出部3、位相補正部4、スイッチング部5、および、制御部7より構成されている。モータ制御装置は、電源6に接続されて用いられる。

Claims (5)
- U相、V相、W相の3相からなるモータの回転角度を検出する回転角度検出部と、
前記モータの各相の相電流を検出する相電流検出部と、
前記相電流検出部が検出した前記相電流に基づいて、前記回転角度検出部が検出した前記回転角度を補正して、位相補正回転角度を出力する位相補正部と、
前記位相補正部によって得られた前記位相補正回転角度と前記相電流検出部が検出した前記相電流とに基づいて、前記モータの制御を行う制御部と
を備え、
前記位相補正部は、
前記モータの回転角度に位相誤差が発生していない場合の相電流を相電流理論値として算出しておき、前記モータのモータ端を短絡させた状態で前記相電流検出部が検出した相電流と前記相電流理論値との差に基づいて位相誤差補正値を算出し、前記位相誤差補正値を用いて前記回転角度に位相補正を行った前記位相補正回転角度を出力する、
モータ制御装置。 - 前記位相補正部は、
前記位相誤差補正値の算出を、前記モータの内部抵抗のインピーダンスよりも前記モータのインダクタンスのインピーダンスが大きくなる回転数で前記モータが回転している状態で実施する、
請求項1に記載のモータ制御装置。 - 第1のスイッチ素子と第2のスイッチ素子とが直列に接続され、前記第1のスイッチ素子と前記第2のスイッチ素子との接続点が前記モータの各相にそれぞれ接続された3つのスイッチ体を並列接続させたスイッチング部
をさらに備え、
前記制御部は、前記スイッチング部の前記第1のスイッチ素子と前記第2のスイッチ素子のONおよびOFFを制御することで、前記モータの制御を行うものであって、
前記制御部は、各前記スイッチ体の前記第1のスイッチ素子をOFF、前記第2のスイッチ素子をONとすることで、前記モータ端を短絡させる、
請求項1または2に記載のモータ制御装置。 - 第1のスイッチ素子と第2のスイッチ素子とが直列に接続され、前記第1のスイッチ素子と前記第2のスイッチ素子との接続点が前記モータの各相にそれぞれ接続された3つのスイッチ体を並列接続させたスイッチング部
をさらに備え、
前記制御部は、前記スイッチング部の前記第1のスイッチ素子と前記第2のスイッチ素子のONおよびOFFを制御することで、前記モータの制御を行うものであって、
前記制御部は、各前記スイッチ体の前記第1のスイッチ素子をON、前記第2のスイッチ素子をOFFとすることで、前記モータ端を短絡させる、
請求項1または2に記載のモータ制御装置。 - 前記相電流理論値は、前記モータの設計値および前記モータの回転数に基づいて算出される、
請求項1から4までのいずれか1項に記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016102995A JP6211135B1 (ja) | 2016-05-24 | 2016-05-24 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016102995A JP6211135B1 (ja) | 2016-05-24 | 2016-05-24 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6211135B1 true JP6211135B1 (ja) | 2017-10-11 |
| JP2017212783A JP2017212783A (ja) | 2017-11-30 |
Family
ID=60040435
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016102995A Active JP6211135B1 (ja) | 2016-05-24 | 2016-05-24 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6211135B1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200331335A1 (en) * | 2018-04-16 | 2020-10-22 | Mitsubishi Electric Corporation | Synchronous machine drive control device, and vehicle equipped with synchronous machine subjected to drive control by said synchronous machine drive control device |
| DE112020005184T5 (de) | 2019-11-29 | 2022-09-22 | Hitachi Astemo, Ltd. | Leistungsumsetzungsvorrichtung |
| CN115917955A (zh) * | 2020-07-08 | 2023-04-04 | 日立安斯泰莫株式会社 | 电动机控制装置、电动机控制方法 |
| WO2023037589A1 (ja) * | 2021-09-13 | 2023-03-16 | 日立Astemo株式会社 | インバータ制御装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001211698A (ja) * | 2000-01-20 | 2001-08-03 | Hitachi Ltd | 同期モータ制御装置 |
| JP2004266935A (ja) * | 2003-02-28 | 2004-09-24 | Mitsubishi Electric Corp | 同期モータの制御装置および同期モータの回転位置ずれ補正方法 |
| US20060125440A1 (en) * | 2002-11-09 | 2006-06-15 | Cambridge Consultants Limited | Controller for a synchronous motor |
| JP2008236959A (ja) * | 2007-03-22 | 2008-10-02 | Hitachi Ltd | モータ制御装置およびモータシステム |
| JP2010057228A (ja) * | 2008-08-27 | 2010-03-11 | Hitachi Ltd | モータ制御装置 |
| WO2013132620A1 (ja) * | 2012-03-07 | 2013-09-12 | 三菱電機株式会社 | 空気調和機 |
| JP2014176181A (ja) * | 2013-03-08 | 2014-09-22 | Nissan Motor Co Ltd | モータ制御装置 |
-
2016
- 2016-05-24 JP JP2016102995A patent/JP6211135B1/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001211698A (ja) * | 2000-01-20 | 2001-08-03 | Hitachi Ltd | 同期モータ制御装置 |
| US20060125440A1 (en) * | 2002-11-09 | 2006-06-15 | Cambridge Consultants Limited | Controller for a synchronous motor |
| JP2004266935A (ja) * | 2003-02-28 | 2004-09-24 | Mitsubishi Electric Corp | 同期モータの制御装置および同期モータの回転位置ずれ補正方法 |
| JP2008236959A (ja) * | 2007-03-22 | 2008-10-02 | Hitachi Ltd | モータ制御装置およびモータシステム |
| JP2010057228A (ja) * | 2008-08-27 | 2010-03-11 | Hitachi Ltd | モータ制御装置 |
| WO2013132620A1 (ja) * | 2012-03-07 | 2013-09-12 | 三菱電機株式会社 | 空気調和機 |
| JP2014176181A (ja) * | 2013-03-08 | 2014-09-22 | Nissan Motor Co Ltd | モータ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017212783A (ja) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4434184B2 (ja) | 電気モータのフィードバック制御方法および装置 | |
| JP6167982B2 (ja) | モータ駆動装置および電動圧縮機 | |
| JP4879649B2 (ja) | 電動機の制御装置 | |
| US7548038B2 (en) | Controller for motor | |
| JP5550672B2 (ja) | モータ制御装置 | |
| JP4712585B2 (ja) | 電動機の制御装置 | |
| JP6211135B1 (ja) | モータ制御装置 | |
| JP2014171326A (ja) | 回転電機制御装置 | |
| JP2008005671A (ja) | 永久磁石型回転電機の制御装置 | |
| JP5267848B2 (ja) | モータ制御装置 | |
| JP4010195B2 (ja) | 永久磁石式同期モータの制御装置 | |
| JP4749941B2 (ja) | 電動機の制御装置 | |
| JP2017108599A (ja) | レゾルバオフセット測定方法 | |
| JP4652176B2 (ja) | 永久磁石型回転電機の制御装置 | |
| JP3804686B2 (ja) | モータ駆動制御装置及び電動パワーステアリング装置 | |
| JP7361924B2 (ja) | モータ制御装置、モータ制御方法 | |
| JP2009240125A (ja) | 電動機システムの制御装置 | |
| JP2008072858A (ja) | 車両用回転電機の制御装置 | |
| CN114208020B (zh) | 交流旋转电机的控制装置及电动助力转向装置 | |
| JP4850543B2 (ja) | だ行回転速度推定装置及びだ行回転速度推定方法 | |
| JP3653437B2 (ja) | 永久磁石式同期モータの制御方式 | |
| WO2019187678A1 (ja) | モータ制御装置、電動車両 | |
| JP2009165333A (ja) | 同期電動機の制御装置 | |
| JP5212697B2 (ja) | 電動機の制御装置 | |
| WO2019207754A1 (ja) | 電動機制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170815 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170912 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6211135 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |