JP6126331B2 - 像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 - Google Patents
像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 Download PDFInfo
- Publication number
- JP6126331B2 JP6126331B2 JP2012090450A JP2012090450A JP6126331B2 JP 6126331 B2 JP6126331 B2 JP 6126331B2 JP 2012090450 A JP2012090450 A JP 2012090450A JP 2012090450 A JP2012090450 A JP 2012090450A JP 6126331 B2 JP6126331 B2 JP 6126331B2
- Authority
- JP
- Japan
- Prior art keywords
- calculation
- image blur
- output
- blur correction
- band
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
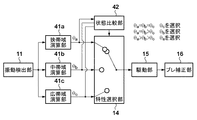
図1は本発明の第1の実施形態の像ブレ補正装置の構成を示すブロック図である。図1において、振動検出部11は、振動ジャイロなどの角速度計から構成され、撮影機器(デジタルカメラやデジタルビデオカメラなどの撮像装置や交換レンズなどの光学機器)に加わる振れを検出する。演算部12は振動検出部11に重畳するDC成分をカットするハイパスフィルタと、その信号を積分して角度情報に変換する積分器で構成され、ハイパスフィルタと積分器はその処理周波数帯域が異なる複数の特性を有する。状態検出部13は本実施形態の特徴部分であり、詳細は後述する。特性選択部14は状態検出部13の検出結果に基づいて演算部12の複数の特性の中で適した特性を選択する。駆動部15は特性選択部14で選択された演算特性の演算部12が出力する角度信号に基づいて像ブレ補正部16を駆動する。像ブレ補正部16は、撮影機器の振れに起因する画像ブレを補正するものである。
第1の実施形態では単一の演算部12の演算帯域を走査し、その時の手ブレ振幅やその変化率に基づいて演算部の帯域制限を行った。この様に一つの演算部12の帯域を走査する場合、その走査時間が必要なこと、また、像ブレ補正機能起動時だけではなく起動後も常に手ブレの変化率を検出するたびに実際の像ブレ補正精度も変化してしまうことの問題がある。
(第3の実施形態)
第2の実施形態では、演算部を複数設け、常にそれらの比較、選択を行うことで必要な演算帯域を早期に実現する構成にしていた。しかしながら特性選択部14が演算部を選択し以前の演算部から切り換える時、その前後で演算帯域の急激な変化が生じ、画像ブレ補正が不連続になってしまう場合もある。
(1)演算部41a、41b、41c共その出力に差が少なく、且つ各々の演算部41a、41b、41cの瞬間出力が閾値24を下回っている場合に、状態比較部42は演算部41aの演算帯域と同じ演算帯域を目標値算出部71に設定する。
(2)演算部41aの出力より演算部41bの出力が大きく、演算部41cの出力は演算部41bの出力と差が少ない場合であり、且つ各々の演算部41a、41b、41cの瞬間出力が閾値24を下回っている場合に、状態比較部42は演算部41bの演算帯域と同じ演算帯域を目標値算出部71に設定する。
(3)演算部41aの出力より演算部41bの出力が大きく、演算部41cの出力が演算部41bの出力より大きい場合であり、且つ各々の演算部41a、41b、41cの瞬間出力が閾値24を下回っている場合には状態比較部42は演算部41cの演算帯域と同じ演算帯域を目標値算出部71に設定する。
(第4の実施形態)
第3の実施形態では、演算部を複数設けることで画像ブレ補正とは独立に、適した演算帯域を常に求めることができた。しかしながら、そのために複数の演算部を設け、同時に作動させる必要があった。第4の実施形態では演算帯域を求めるレスポンスを多少犠牲にしても演算部のリダクションを行っている。
(1)演算帯域51a時、51b時、51c時共その出力に差が少なく、且つ各々の演算帯域時の瞬間出力が閾値24を下回っている場合には、状態検出部13は演算帯域51aを目標値算出部71に設定する。
(2)演算帯域51a時の出力より演算帯域51b時の出力が大きく、演算帯域51c時の出力は演算帯域51b時の出力と差が少ない場合であり、且つ各々の演算帯域時の瞬間出力が閾値24を下回っている場合には状態検出部13は演算帯域51bを目標値算出部71に設定する。
(3)演算帯域51a時の出力より演算帯域51b時の出力が大きく、演算帯域51c時の出力が演算帯域51b時の出力より大きい場合であり、且つ各々の演算帯域時の瞬間出力が閾値24を下回っている場合には状態検出部13は演算帯域51cを目標値算出部71に設定する。
Claims (9)
- 機器の振れを検出する振動検出手段と、
前記振動検出手段の出力を演算する複数の異なる特性を有する演算手段と、
前記複数の異なる特性を有する演算手段の間の出力変化の状態を検出する状態検出手段と、
前記状態検出手段の検出結果に基づいて前記複数の異なる特性の中から1つの特性を選択する選択手段と、
前記機器の振れに起因する画像ブレを補正する像ブレ補正手段と、
前記選択手段で選択された特性の前記演算手段の出力に基づいて前記像ブレ補正手段を駆動する駆動手段と、
を備え、
前記選択手段は、前記振動検出手段の出力を演算する演算帯域を広くしていくほど大きくなる前記演算手段の出力の増加率が鈍化を始める時点の演算帯域に対応する特性を選択することを特徴とする像ブレ補正装置。 - 機器の振れを検出する振動検出手段と、
前記振動検出手段の出力を演算する特性が異なる複数の演算手段と、
前記複数の演算手段の間の出力変化の状態を検出する状態検出手段と、
前記状態検出手段の検出結果に基づいて前記複数の演算手段から1つの演算手段を選択する選択手段と、
前記機器の振れに起因する画像ブレを補正する像ブレ補正手段と、
前記選択手段で選択された演算手段の出力に基づいて前記像ブレ補正手段を駆動する駆動手段と、
を備え、
前記選択手段は、広帯域の演算帯域ほど大きくなる前記複数の演算手段の間の出力変化が鈍化を始める時点の演算帯域に対応する演算手段を選択することを特徴とする像ブレ補正装置。 - 前記選択手段の選択結果に応じた演算帯域となる様に、前記演算帯域を所定の時定数で変更していく変更手段をさらに備えることを特徴とする請求項1又は2に記載の像ブレ補正装置。
- 機器の振れを検出する振動検出手段と、
前記振動検出手段の出力を演算する複数の異なる特性を有する演算手段と、
前記複数の異なる特性を有する演算手段の間の出力変化の状態を検出する状態検出手段と、
前記状態検出手段の検出結果に基づいて前記複数の異なる特性の中から1つの特性を選択する選択手段と、
前記機器の振れに起因する画像ブレを補正する像ブレ補正手段と、
前記選択手段で選択された特性の前記演算手段の出力に基づいて前記像ブレ補正手段を駆動する駆動手段と、
を備え、
前記選択手段は、前記演算手段の演算特性を所定の周期で変更し、前記演算手段の演算帯域を広くしていくほど大きくなる前記演算手段の出力の増加率が鈍化を始める時点の演算帯域に対応する特性を選択することを特徴とする像ブレ補正装置。 - 請求項1乃至4のいずれか1項に記載の像ブレ補正装置を備えることを特徴とする光学機器。
- 請求項1乃至4のいずれか1項に記載の像ブレ補正装置を備えることを特徴とする撮像装置。
- 機器の振れを検出する振動検出手段と、前記振動検出手段の出力を演算する複数の異なる特性を有する演算手段とを備える像ブレ補正装置を制御する方法であって、
前記複数の異なる特性を有する演算手段の間の出力変化の状態を検出する状態検出工程と、
前記状態検出工程の検出結果に基づいて前記複数の異なる特性の中から1つの特性を選択する選択工程と、
前記機器の振れに起因する画像ブレを補正する像ブレ補正工程と、
前記選択工程で選択された特性の前記演算手段の出力に基づいて前記像ブレ補正工程を制御する制御工程と、
を備え、
前記選択工程は、前記振動検出手段の出力を演算する演算帯域を広くしていくほど大きくなる前記演算手段の出力の増加率が鈍化を始める時点の演算帯域に対応する特性を選択することを特徴とする像ブレ補正装置の制御方法。 - 機器の振れを検出する振動検出手段と、前記振動検出手段の出力を演算する特性が異なる複数の演算手段とを備える像ブレ補正装置を制御する方法であって、
前記複数の演算手段の間の出力変化の状態を検出する状態検出工程と、
前記状態検出工程の検出結果に基づいて前記複数の演算手段から1つの演算手段を選択する選択工程と、
前記機器の振れに起因する画像ブレを補正する像ブレ補正工程と、
前記選択工程で選択された演算手段の出力に基づいて前記像ブレ補正工程を制御する制御工程と、
を備え、
前記選択工程は、広帯域の演算帯域ほど大きくなる前記複数の演算手段の間の出力変化が鈍化を始める時点の演算帯域に対応する演算手段を選択することを特徴とする像ブレ補正装置の制御方法。 - 機器の振れを検出する振動検出手段と、前記振動検出手段の出力を演算する複数の異なる特性を有する演算手段とを備える像ブレ補正装置を制御する方法であって、
前記複数の異なる特性を有する演算手段の間の出力変化の状態を検出する状態検出工程と、
前記状態検出工程の検出結果に基づいて前記複数の異なる特性の中から1つの特性を選択する選択工程と、
前記選択工程で選択された特性の前記演算手段の出力に基づいて、前記機器の振れに起因する画像ブレを補正する像ブレ補正手段を駆動する駆動工程と、
を備え、
前記選択工程は、前記演算手段の演算特性を所定の周期で変更し、前記演算手段の演算帯域を広くしていくほど大きくなる前記演算手段の出力の増加率が鈍化を始める時点の演算帯域に対応する特性を選択することを特徴とする像ブレ補正装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012090450A JP6126331B2 (ja) | 2012-04-11 | 2012-04-11 | 像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012090450A JP6126331B2 (ja) | 2012-04-11 | 2012-04-11 | 像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013218213A JP2013218213A (ja) | 2013-10-24 |
| JP6126331B2 true JP6126331B2 (ja) | 2017-05-10 |
Family
ID=49590352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012090450A Active JP6126331B2 (ja) | 2012-04-11 | 2012-04-11 | 像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6126331B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017107093A (ja) * | 2015-12-10 | 2017-06-15 | リコーイメージング株式会社 | 振れ補正制御装置および撮像装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS638629A (ja) * | 1986-06-27 | 1988-01-14 | Canon Inc | カメラの振動検出装置 |
| JP2003091028A (ja) * | 2001-09-19 | 2003-03-28 | Canon Inc | 補正手段の位置制御装置 |
| JP2004102044A (ja) * | 2002-09-11 | 2004-04-02 | Canon Inc | 像ぶれ補正機能付カメラ |
| JP2007324929A (ja) * | 2006-05-31 | 2007-12-13 | Victor Co Of Japan Ltd | 手振れ補正装置 |
| JP4893813B2 (ja) * | 2009-12-07 | 2012-03-07 | 株式会社ニコン | ブレ補正装置及び撮影装置 |
-
2012
- 2012-04-11 JP JP2012090450A patent/JP6126331B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013218213A (ja) | 2013-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6494202B2 (ja) | 像振れ補正装置、その制御方法、および撮像装置 | |
| US9762802B2 (en) | Image blurring correction apparatus, control method thereof, optical device and imaging apparatus | |
| JP4245185B2 (ja) | 撮像装置 | |
| US9253400B2 (en) | Image capture apparatus and control method thereof | |
| JP6581352B2 (ja) | 像振れ補正装置及びその制御方法、撮像装置、レンズ装置、プログラム、記憶媒体 | |
| JP6302341B2 (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2012015641A (ja) | 撮像装置およびその制御方法 | |
| JP7045877B2 (ja) | 像振れ補正装置、撮像システム、及びそれらの制御方法、プログラム | |
| JP2002209136A (ja) | 撮影装置 | |
| JP6108940B2 (ja) | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 | |
| JP5612917B2 (ja) | 光学機器及びその制御方法 | |
| US8836820B2 (en) | Image capturing apparatus having a control unit controlling switching unit such that first image is displayed in case a predetermined motion is detected and a composite image is displayed in case motion is not detected, control method thereof, and storage medium | |
| JP5869876B2 (ja) | 撮像装置およびその制御方法 | |
| JP6373121B2 (ja) | 画像処理装置およびその制御方法 | |
| JP6126331B2 (ja) | 像ブレ補正装置及びそれを備えた光学機器、撮像装置、像ブレ補正装置の制御方法 | |
| JP5886623B2 (ja) | 撮像装置およびその制御方法 | |
| JP2011023988A (ja) | 撮像装置 | |
| US11265478B2 (en) | Tracking apparatus and control method thereof, image capturing apparatus, and storage medium | |
| JP5153183B2 (ja) | 画像振れ補正装置および撮像装置 | |
| JP2005326776A (ja) | 像振れ補正装置 | |
| JP2015021992A (ja) | 像振れ補正装置、その制御方法、および制御プログラム、並びに撮像装置 | |
| JP6659132B2 (ja) | 像ブレ補正装置、撮像装置、制御方法およびプログラム | |
| JP2014215550A (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2004312136A (ja) | 撮像装置 | |
| JP3911504B2 (ja) | 撮像装置、画像補正方法、プログラム、記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170407 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6126331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |