JP6108940B2 - 像振れ補正装置及びその制御方法、プログラム、記憶媒体 - Google Patents
像振れ補正装置及びその制御方法、プログラム、記憶媒体 Download PDFInfo
- Publication number
- JP6108940B2 JP6108940B2 JP2013093044A JP2013093044A JP6108940B2 JP 6108940 B2 JP6108940 B2 JP 6108940B2 JP 2013093044 A JP2013093044 A JP 2013093044A JP 2013093044 A JP2013093044 A JP 2013093044A JP 6108940 B2 JP6108940 B2 JP 6108940B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- panning
- shake
- detection
- image blur
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6815—Motion detection by distinguishing pan or tilt from motion
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Studio Devices (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
図1は、本発明の第1の実施形態における撮像装置のシステム構成を示すブロック図である。図1において、変倍レンズ群1(ズームレンズ)は焦点距離を変えて変倍を行う。像振れ補正レンズ群2(シフトレンズ)は光軸と垂直な方向に動いて像振れ(撮影画像の振れ)を補正する。また、焦点調整レンズ群3(フォーカスレンズ)は焦点調節機能と変倍による焦点面の移動を補正するいわゆるコンペ機能を兼ね備えている。撮像素子4はレンズ群1,2,3を通して結像された被写体像を光電変換して画像信号を生成する。撮像素子4は、例えばCCDやCMOSセンサなどが用いられる。カメラ信号処理回路5は、アナログ信号処理回路とデジタル信号処理回路からなる。カメラ信号処理回路5のアナログ信号処理回路は撮像素子4で得られた信号に所定の処理を施してアナログ撮像信号を生成する回路である。そして、アナログ信号処理回路は、例えばCDS(co-related double sampling:相関二重サンプリング)回路、AGC(Automatic Gain Control)回路等から構成されている。カメラ信号処理回路5のデジタル信号処理回路は、A/D変換器によりアナログ撮像信号をデジタル信号に変換し、ガンマ補正処理、ホワイトバランス処理等、所定の信号処理を施したデジタル映像信号を生成する。
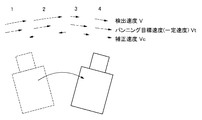
すなわち、一定のパンニング目標速度からセンサ検出した検出速度を引いて補正速度を求めることができる。目標速度Vtに対して検出速度Vが小さければ、シフトレンズ2の動きを速めるようにパンニングをさらに進める方向にシフトレンズ2を駆動する。逆に、目標速度Vtに対して検出速度Vが大きければ、シフトレンズ2の動きを抑えるようにパンニングを遅くする方向にシフトレンズ2を駆動する。
次に、本発明の第2の実施形態について説明する。第1の実施形態では、検出した角変位量の平均値からパンニング目標速度を推定してパンニング補正する方法について説明した。本実施形態では、パンニング目標速度を別の方法で決定する例について説明する。
次に、本発明の第3の実施形態について説明する。本実施形態では、第1の実施形態及び第2の実施形態で説明した方法とは異なる方法で、パンニング目標速度を決定する例について説明する。
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (8)
- 装置の振れを検出する振れ検出手段と、
撮影画像の振れを補正する像振れ補正手段と、
前記振れ検出手段の検出結果に基づいて、パンニング動作が実行されているか否かを検出するパンニング検出手段と、
前記パンニング動作の目標速度を設定する速度設定手段と、
前記速度設定手段で設定した目標速度と前記振れ検出手段で検出した振れの速度に基づいて前記像振れ補正手段の補正量を算出する算出手段と、
前記パンニング検出手段により、前記パンニング動作が実行されていることが検出された場合に、前記算出手段で算出した補正量に基づいて前記像振れ補正手段の動きを制御する制御手段と、
事前の操作に基づいて前記パンニング動作の目標速度を算出し、予め記憶手段に初期速度として記憶させる初期速度設定手段と、を備え、
前記速度設定手段は、前記パンニング検出手段により前記パンニング動作が実行されていることを検出した直後は、前記初期速度設定手段により前記記憶手段に記憶させた前記初期速度を前記パンニング動作の目標速度として設定することを特徴とする像振れ補正装置。 - 前記算出手段は、前記速度設定手段で設定した目標速度と前記振れ検出手段で検出した振れの速度との差分に基づいて、前記像振れ補正手段の補正量を算出し、
前記制御手段は、前記パンニング検出手段により、前記パンニング動作が実行されていることが検出された場合に、前記算出手段で算出した補正量に基づいて前記パンニング動作の速度が一定速度になるように前記像振れ補正手段の動きを制御することを特徴とする請求項1に記載の像振れ補正装置。 - 前記制御手段は、前記パンニング動作における画角の移動方向と垂直な方向の撮影画像の振れに対して、前記振れ検出手段で検出した振れ量に基づいて前記像振れ補正手段の動きを制御することを特徴とする請求項1に記載の像振れ補正装置。
- 前記振れ検出手段は、前記装置の振れの角速度を検出するジャイロセンサであり、前記速度設定手段は前記振れ検出手段で検出した角速度に基づいて求められた画角の移動速度の平均値に基づいて前記パンニング動作の目標速度を推定することを特徴とする請求項1に記載の像振れ補正装置。
- 前記振れ検出手段は、撮影された画像信号から画像の動きベクトルを検出する動きベクトル検出手段であり、前記速度設定手段は前記動きベクトル検出手段により検出された動きベクトルに基づいて前記パンニング動作の目標速度を算出することを特徴とする請求項1に記載の像振れ補正装置。
- 装置の振れを検出する振れ検出工程と、
撮影画像の振れを補正する像振れ補正工程と、
前記振れ検出工程の検出結果に基づいて、パンニング動作が実行されているか否かを検出するパンニング検出工程と、
前記パンニング動作の目標速度を設定する速度設定工程と、
前記速度設定工程で設定した目標速度と前記振れ検出工程で検出した振れの速度に基づいて前記像振れ補正工程の補正量を算出する算出工程と、
前記パンニング検出工程により、前記パンニング動作が実行されていることが検出された場合に、前記算出工程で算出した補正量に基づいて前記像振れ補正工程の動きを制御する制御工程と、
事前の操作に基づいて前記パンニング動作の目標速度を算出し、予め記憶手段に初期速度として記憶させる初期速度設定工程と、を備え、
前記速度設定工程では、前記パンニング検出工程において前記パンニング動作が実行されていることを検出した直後は、前記初期速度設定工程において前記記憶手段に記憶させた前記初期速度を前記パンニング動作の目標速度として設定することを特徴とする像振れ補正装置の制御方法。 - 請求項6に記載の制御方法をコンピュータに実行させるためのプログラム。
- 請求項6に記載の制御方法をコンピュータに実行させるためのプログラムを記憶したコンピュータが読み取り可能な記憶媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013093044A JP6108940B2 (ja) | 2013-04-25 | 2013-04-25 | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 |
| US14/258,748 US9319588B2 (en) | 2013-04-25 | 2014-04-22 | Image capturing apparatus capable of image stabilization during a panning operation and method of controlling the same |
| CN201410168073.1A CN104125393B (zh) | 2013-04-25 | 2014-04-23 | 摄像装置及其控制方法 |
| DE102014207703.6A DE102014207703A1 (de) | 2013-04-25 | 2014-04-24 | Bildaufnahmevorrichtung, verfahren zu deren steuerung, und speichermedium |
| GB1407282.1A GB2515387B (en) | 2013-04-25 | 2014-04-25 | Image capturing apparatus, method of controlling the same, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013093044A JP6108940B2 (ja) | 2013-04-25 | 2013-04-25 | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014216864A JP2014216864A (ja) | 2014-11-17 |
| JP2014216864A5 JP2014216864A5 (ja) | 2016-06-02 |
| JP6108940B2 true JP6108940B2 (ja) | 2017-04-05 |
Family
ID=50971860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013093044A Active JP6108940B2 (ja) | 2013-04-25 | 2013-04-25 | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9319588B2 (ja) |
| JP (1) | JP6108940B2 (ja) |
| CN (1) | CN104125393B (ja) |
| DE (1) | DE102014207703A1 (ja) |
| GB (1) | GB2515387B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6711608B2 (ja) * | 2015-01-16 | 2020-06-17 | キヤノン株式会社 | 制御装置、および、レンズ装置 |
| JP6590541B2 (ja) * | 2015-06-11 | 2019-10-16 | オリンパス株式会社 | ぶれ補正装置 |
| US10708571B2 (en) * | 2015-06-29 | 2020-07-07 | Microsoft Technology Licensing, Llc | Video frame processing |
| JP2017046301A (ja) * | 2015-08-28 | 2017-03-02 | オリンパス株式会社 | 撮像装置 |
| US10277821B2 (en) | 2016-04-19 | 2019-04-30 | Semiconductor Components Industries, Llc | Methods and apparatus for optical image stabilization |
| JP6818426B2 (ja) | 2016-04-20 | 2021-01-20 | キヤノン株式会社 | 像振れ補正装置及びその制御方法、撮像装置、プログラム |
| KR20180070264A (ko) | 2016-12-16 | 2018-06-26 | 삼성전자주식회사 | 패닝 샷 이미지 획득 방법 및 이를 지원하는 전자 장치 |
| US10534837B2 (en) * | 2017-11-13 | 2020-01-14 | Samsung Electronics Co., Ltd | Apparatus and method of low complexity optimization solver for path smoothing with constraint variation |
| JP7071204B2 (ja) * | 2018-04-27 | 2022-05-18 | キヤノン株式会社 | 撮像システム、レンズ装置、撮像装置、及びその制御方法 |
| CN112804444B (zh) * | 2020-12-30 | 2022-08-23 | 影石创新科技股份有限公司 | 一种视频处理方法、装置、计算设备及存储介质 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0556666B1 (en) * | 1992-02-06 | 1999-04-28 | Nikon Corporation | Camera with pan shot detecting device |
| JPH06303495A (ja) * | 1992-08-25 | 1994-10-28 | Sony Corp | カメラ一体型ビデオテープレコーダ |
| JPH0829669A (ja) * | 1994-07-19 | 1996-02-02 | Canon Inc | カメラ |
| JPH10191149A (ja) * | 1996-12-27 | 1998-07-21 | Canon Inc | 画像処理装置および方法並びにカメラ一体型vtr |
| JP4517813B2 (ja) | 2004-10-15 | 2010-08-04 | 株式会社ニコン | パンニング撮影可能なカメラおよび動画像編集用プログラム |
| JP4389749B2 (ja) * | 2004-10-15 | 2009-12-24 | 株式会社ニコン | パンニング撮影可能なカメラおよび動画像編集用プログラム |
| JP4861109B2 (ja) * | 2006-09-27 | 2012-01-25 | 富士通株式会社 | 画像データ処理装置、画像データ処理方法、画像データ処理プログラム、および、撮像装置 |
| JP5230398B2 (ja) * | 2008-12-19 | 2013-07-10 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP5489709B2 (ja) * | 2009-12-28 | 2014-05-14 | キヤノン株式会社 | レンズ装置 |
| JP5810307B2 (ja) * | 2010-05-10 | 2015-11-11 | パナソニックIpマネジメント株式会社 | 撮像装置 |
-
2013
- 2013-04-25 JP JP2013093044A patent/JP6108940B2/ja active Active
-
2014
- 2014-04-22 US US14/258,748 patent/US9319588B2/en active Active
- 2014-04-23 CN CN201410168073.1A patent/CN104125393B/zh active Active
- 2014-04-24 DE DE102014207703.6A patent/DE102014207703A1/de active Pending
- 2014-04-25 GB GB1407282.1A patent/GB2515387B/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| GB201407282D0 (en) | 2014-06-11 |
| GB2515387A (en) | 2014-12-24 |
| JP2014216864A (ja) | 2014-11-17 |
| GB2515387B (en) | 2016-08-03 |
| US9319588B2 (en) | 2016-04-19 |
| US20140320680A1 (en) | 2014-10-30 |
| DE102014207703A1 (de) | 2014-11-13 |
| CN104125393B (zh) | 2017-12-01 |
| CN104125393A (zh) | 2014-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6108940B2 (ja) | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 | |
| US10623652B2 (en) | Image capturing apparatus and method for image stabilization and control using motion vectors | |
| US9170429B2 (en) | Optical apparatus and image capturing apparatus, and method of controlling the same and storage medium | |
| US9635258B2 (en) | Image pickup apparatus, method of controlling image pickup apparatus, image processing apparatus, and image processing method | |
| JP5409342B2 (ja) | 撮像装置及びその制御方法 | |
| JP6581352B2 (ja) | 像振れ補正装置及びその制御方法、撮像装置、レンズ装置、プログラム、記憶媒体 | |
| JP6478504B2 (ja) | 撮像装置およびその制御方法 | |
| JP6995561B2 (ja) | 像ブレ補正装置およびその制御方法、撮像装置 | |
| JP6598537B2 (ja) | 画像処理装置、撮像装置および画像処理プログラム | |
| US9811891B2 (en) | Image shake correction device, optical apparatus, imaging apparatus, and control method | |
| JP6818473B2 (ja) | ブレ補正装置およびその制御方法、撮像装置 | |
| JP2018036445A (ja) | 制御装置、撮像装置、レンズ装置、制御方法、プログラム、および、記憶媒体 | |
| JP6932531B2 (ja) | 像ブレ補正装置、撮像装置および撮像装置の制御方法 | |
| JP2017161649A (ja) | 像ブレ補正装置及びその制御方法、プログラム、記憶媒体 | |
| JP6738151B2 (ja) | 撮像装置及びその制御方法 | |
| JP6289070B2 (ja) | 撮像装置およびその制御方法 | |
| JP6935269B2 (ja) | 像ブレ補正装置およびその制御方法、撮像装置 | |
| JP6873841B2 (ja) | 像ブレ補正装置、撮像装置、撮像システム、制御方法、プログラムおよび記憶媒体 | |
| JP2020118789A (ja) | 撮像装置、撮像システム、撮像装置の制御方法、およびプログラム | |
| JP7214424B2 (ja) | 撮像装置およびその制御方法 | |
| JP2007264074A (ja) | 撮影装置及びその制御方法 | |
| WO2020012960A1 (ja) | 撮像装置 | |
| JP6778014B2 (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP6249813B2 (ja) | 撮像装置、撮像装置の制御方法、プログラム、および、記憶媒体 | |
| JP2015158627A (ja) | 撮像装置およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160407 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160407 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170307 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6108940 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |