以下、この発明を具体的に説明する。この発明で対象とする車両は、いわゆるツーモータ式ハイブリッド車両であって、種類の異なる動力源としてエンジンおよび二つのモータが搭載されている。この発明の一例におけるハイブリッド車両の制御装置は、駆動特性が異なる複数の走行モードを設定できるとともに、その走行モードを切り替える制御を実行するように構成されている。図1は、この発明で対象とすることができるパワートレーンの一例を示している。図1に示すように、車両Veは、動力源として、燃料を燃焼させて動力を出力するエンジン(ENG)1と、電力が供給されて動力を出力する機能と機械的な外力によって強制的に回転させられて発電する機能とを有する第1モータ・ジェネレータ(MG1)2および第2モータ・ジェネレータ(MG2)3とを備えている。エンジン1は、例えばガソリンエンジンやディーゼルエンジンやガスエンジンなど、燃料を使用する内燃機関である。モータ・ジェネレータ2,3は、図示しない蓄電池などの蓄電装置から電力を供給されて駆動し、あるいは発電した電力を蓄電装置へ供給するように構成されている。
エンジン1から車軸11に到る動力伝達経路中には、エンジン1が出力した動力を、第1モータ・ジェネレータ2側と車軸11に一体回転するように連結された図示しない駆動輪側とに分割する動力分割機構5が設けられている。その動力伝達経路中のエンジン1と動力分割機構5との間には、直結段と増速段(オーバードライブ(O/D)段)とに切り替えられるように構成されている変速部4が設けられている。変速部4および動力分割機構5は、エンジン1の出力軸(クランクシャフト)6と同一の軸線上に設けられており、その動力伝達経路において変速部4が動力分割機構5の上流側に配置されている。
変速部4は、複数の回転要素を有し差動作用を生じる差動機構によって構成され、図1に示す例ではシングルピニオン型の遊星歯車機構により構成されている。その変速部4は、三つの回転要素として、外歯歯車であるサンギヤ4sと、サンギヤ4sに対して同心円上に配置された内歯歯車であるリングギヤ4rと、サンギヤ4sおよびリングギヤ4rと噛み合った状態で配置されているピニオンギヤを自転可能かつ公転可能に保持しているキャリヤ4cと備えている。具体的には、キャリヤ4cにエンジン1の出力軸6が連結され、リングギヤ4rが動力分割機構5のキャリヤ5cに一体回転するように連結されている。すなわち、変速部4の入力軸(キャリヤ4cと一体回転する軸部)がエンジン1と連結され、変速部4の出力軸(リングギヤ4rと一体回転する軸部)が動力分割機構5と連結されている。
また、変速部4のサンギヤ4sとキャリヤ4cとの間に、これらを連結し、またその連結を解除するクラッチC1が設けられている。さらに、そのサンギヤ4sを固定し、またその固定を解除するブレーキB1が設けられている。クラッチC1およびブレーキB1は、複数の走行モードを切り替えるための係合装置であるとともに、エンジン1の出力軸6の回転を止める固定手段として機能し、例えば油圧によって係合する摩擦係合機構によって構成することができる。なお、軸線方向ではエンジン1と動力分割機構5との間にブレーキB1およびクラッチC1が配置されている。
例えば、クラッチC1が係合することにより、変速部4は二つの回転要素であるサンギヤ4sとキャリヤ4cとが連結されている遊星歯車機構の全体が一体となって回転し、増速作用および減速作用の生じない状態、いわゆる直結状態となる。つまり、クラッチC1に加えてブレーキB1を係合させることにより、変速部4の全体が一体となって固定され、動力分割機構5のキャリヤ5cおよびエンジン1の出力軸6の回転が止められる。これに対して、ブレーキB1のみを係合させれば、変速部4におけるサンギヤ4sが固定要素、キャリヤ4cが入力要素となるので、出力要素であるリングギヤ4rがキャリヤ4cより高回転数でキャリヤ4cと同方向に回転する。すなわち、変速部4が増速機構として機能するため、変速部4においてO/D段が設定される。
動力分割機構5は、変速部4と同様にシングルピニオン型の遊星歯車機構により構成されており、三つの回転要素として、サンギヤ5sとリングギヤ5rとキャリヤ5cと備えている。サンギヤ5sに第1モータ・ジェネレータ2のロータ2aが一体回転するように連結されている。その第1モータ・ジェネレータ2は、動力分割機構5に隣接して配置され、かつ軸線方向で動力分割機構5に対してエンジン1および変速部4とは反対側に配置されている。また、キャリヤ5cに変速部4のリングギヤ4rが一体回転するように連結されている。さらに、リングギヤ5rにドライブギヤ7が一体回転するように連結されている。そのドライブギヤ7は、軸線方向で変速部4と動力分割機構5との間に配置されている。
また、ドライブギヤ7は、カウンタギヤ機構8を介して終減速機であるデファレンシャル10に連結されている。カウンタギヤ機構8は、動力分割機構5や第1モータ・ジェネレータ2などの回転中心軸線と平行に配置されたカウンタシャフト8bと、そのカウンタシャフト8bに一体回転するように取り付けられたカウンタドリブンギヤ8aおよびカウンタドライブギヤ8cとから構成されている。すなわち、ドライブギヤ7は、カウンタドリブンギヤ8aに噛み合っている。カウンタドリブンギヤ8aは、ドライブギヤ7より小径のギヤであり、動力分割機構5からカウンタシャフト8bに向けてトルクを伝達する場合に減速作用(トルクの増幅作用)が生じる。また、カウンタドリブンギヤ8aよりも小径のギヤであるカウンタドライブギヤ8cは、デファレンシャル10のリングギヤ9に噛み合っている。リングギヤ9は、カウンタドライブギヤ8cよりも大径のギヤである。そして、デファレンシャル10から左右の車軸11を介して左右の駆動輪(図示せず)に動力を伝達するように構成されている。なお、図1では作図の都合上、デファレンシャル10の位置を図1における右側にずらして記載してある。
さらに、第2モータ・ジェネレータ3は、回転中心軸線がカウンタシャフト8bと平行になるように配置されている。その第2モータ・ジェネレータ3のロータ3aと一体回転するように連結されたリダクションギヤ12が、カウンタギヤ機構8のカウンタドリブンギヤ8aに噛み合っている。リダクションギヤ12は、カウンタドリブンギヤ8aより小径であり、第2モータ・ジェネレータ3のトルク(MG2トルク)を増幅してカウンタドリブンギヤ8aもしくはカウンタシャフト8bに伝達するように構成されている。すなわち、例えばエンジン1からの動力で走行している場合など、動力伝達機構5から駆動輪側に伝達されるエンジントルクにMG2トルクを付加できるように構成されている。
また、各モータ・ジェネレータ2,3は、図示しないインバータなどのコントローラを介して蓄電装置に接続されている。そして、各モータ・ジェネレータ2,3はモータとして機能し、また発電機として機能するように、電子制御装置によって電流が制御される。また、エンジン1は、電子制御装置によってスロットル開度や点火時期が制御され、さらには自動停止ならびに始動再始動の制御が行われる。
ここで、図2を参照して、車両Veにおける各種制御を実施するコントローラとしての電子制御装置について説明する。図2に示すように、車両Veに搭載された電子制御装置(ECU)として、走行のための全体的な制御を行うハイブリッド制御装置(以下「HV−ECU」という)21と、各モータ・ジェネレータ2,3を制御するためのモータ・ジェネレータ制御装置(以下「MG−ECU」という)22と、エンジン1を制御するためのエンジン制御装置(以下「ENG−ECU」という)23とが設けられている。これらの各ECU21,22,23は、マイクロコンピュータを主体にして構成され、入力されたデータおよび予め記憶させられているデータを使用して演算を行い、その演算結果を制御指令信号として出力するように構成されている。なお、以下の説明では、各ECU21,22,23を区別せずに単にECUと記載して説明する場合がある。
そのECUへの入力データの例を挙げると、HV−ECU21には、車速、アクセル開度、第1モータ・ジェネレータ2の回転数(MG1回転数)、第2モータ・ジェネレータ3の回転数、リングギヤ5rの回転数(出力軸回転数)、エンジン1の回転数(エンジン回転数)、蓄電装置の充電容量(SOC)などが入力される。また、HV−ECU21から出力される指令信号の例を挙げると、第1モータ・ジェネレータ2のトルク指令値(MG1トルク指令値)、第2モータ・ジェネレータ3のトルク指令値(MG2トルク指令値)、エンジン1のトルク指令値(エンジントルク指令値)、ブレーキB1の油圧指令信号PB1、クラッチC1の油圧指令信号PC1などが出力されるように構成されている。
その第1モータ・ジェネレータ2のトルク指令値および第2モータ・ジェネレータ3のトルク指令値は、MG−ECU22に制御データとして入力される。MG−ECU22は、それらのトルク指令値に基づいて演算を行って第1モータ・ジェネレータ2や第2モータ・ジェネレータ3の電流指令信号を出力するように構成されている。また、エンジントルク指令信号は、ENG−ECU23に制御データとして入力される。ENG−ECU23は、エンジントルク指令信号に基づいて演算を行って電子スロットルバルブ(図示せず)に対してスロットル開度信号を出力し、また点火時期を制御する点火信号を出力するように構成されている。
図1に示すパワートレーンを搭載した車両Veでは、各ECU21,22,23による制御によって、駆動特性の異なる複数の走行モードを設定することができる。この発明で対象とする制御装置は、エンジン1が出力する動力により走行するエンジン走行モードと、両モータ・ジェネレータ2,3が出力する動力により走行するツーモータ走行モードと、第2モータ・ジェネレータ3が出力する動力のみで走行するワンモータ走行モードとを選択できるように構成されている。エンジン走行モードでは、要求駆動力を満たすパワーをエンジン1が出力するように制御され、燃費が良好になるようにエンジン1の回転数が制御される。ワンモータ走行モードでは、第2モータ・ジェネレータ3のみで出力するように制御される。ツーモータ走行モードでは、要求駆動力を満たすパワーを二つのモータ・ジェネレータ2,3が出力するように制御される。また、それらのモータ走行モードでは、エンジン1は駆動トルクを出力していない。これらの各走行モードおよび後進状態でのクラッチC1およびブレーキB1の係合および開放の状態、ならびに各モータ・ジェネレータ2,3の動作の状態を図3にまとめて示してある。なお、以下の説明では、エンジン1の駆動あるいは停止の状態と、クラッチC1およびブレーキB1の係合あるいは開放の状態と、各モータ・ジェネレータ2,3の動作の状態とに応じて、変速部4が変速状態あるいはニュートラル状態と記載して説明する場合がある。変速部4のニュートラル状態とは、クラッチC1およびブレーキB1を開放させた状態のことである。
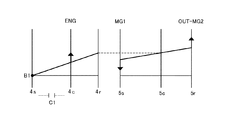
ここで各動作状態について説明すると、図3に示す「HV」は、エンジン1を駆動しているハイブリッド駆動状態を示している。このハイブリッド駆動状態は、前述したエンジン走行モードに含まれ、車両Veが軽負荷かつ中高車速で走行している状態では、変速部4がO/D段(ハイ)に設定される。すなわち、クラッチC1が開放させられ、ブレーキB1が係合させられる。この状態を周知の共線図を用いて示すと、図4に示す通りである。図4に示すように、エンジン走行モードでは、入力要素である変速部4のキャリヤ4cにエンジン1のトルクが作用し、出力要素である動力分割機構5のリングギヤ5rに走行抵抗に相当するトルクが作用している。この状態で、動力分割機構5の反力要素であるサンギヤ5sに第1モータ・ジェネレータ2のトルクを負方向(エンジントルクの作用方向とは反対の方向)を作用させると、出力要素のリングギヤ5rに正方向のトルクが生じる。第1モータ・ジェネレータ2による負方向のトルクは、第1モータ・ジェネレータ2が正回転(エンジン1と同じ方向の回転)している状態では、第1モータ・ジェネレータ2を発電機として機能させることにより生じる。したがって、図4に示す状態では、第1モータ・ジェネレータ2で電力が生じ、その電力が第2モータ・ジェネレータ3に供給されて第2モータ・ジェネレータ3がモータとして動作してトルク(MG2トルク)を出力する。つまり、そのMG2トルクがエンジン1からのトルクに合算された駆動トルクが車軸11に伝達される。すなわち、図4に示す状態では、リングギヤ5rに作用する正方向のトルクには、エンジントルクにMG2トルクが付加されている。さらに、この状態では、要求駆動力を満たすパワーをエンジン1および第2モータ・ジェネレータ3が出力するように制御され、第1モータ・ジェネレータ2を駆動制御することによってエンジン1の回転数を燃費の良好な回転数に制御している。
さらに、低車速でアクセル開度が大きくなるなど、大きい駆動力が要求されている場合には、変速部4は直結(ロー)状態に制御される。すなわち、クラッチC1が係合させられ、かつブレーキB1が開放させられて変速部4の全体が一体となって回転する状態になる。なお、このロー状態であっても、前述したハイ状態と同様に、第1モータ・ジェネレータ2が発電機として動作させられ、かつ第2モータ・ジェネレータ3がモータとして動作させられる。したがって、ハイおよびロー状態からなるハイブリッド駆動状態では、エンジン1が出力した動力が、動力分割機構5において第1モータ・ジェネレータ2側にドライブギヤ7側とに分割され、ドライブギヤ7側に分割された動力はカウンタシャフト8bを介してデファレンシャル10に伝達される。さらに、動力分割機構5を介して第1モータ・ジェネレータ2側に伝達された動力は、第1モータ・ジェネレータ2により一旦電力に変換された後に第2モータ・ジェネレータ3で機械的な動力に変換され、その第2モータ・ジェネレータ3が出力した動力がカウンタドリブンギヤ8aやカウンタシャフト8b等を介してデファレンシャルギヤ10に伝達される。さらに、エンジン1を駆動して後進走行する場合、変速部4は直結(ロー)状態に制御され、また第1モータ・ジェネレータ2が発電機として動作させられ、かつ第2モータ・ジェネレータ3がモータとして動作させられる。この場合の車軸11の回転方向は、各モータ・ジェネレータ2,3の回転方向や回転数を制御することにより、後進走行方向に制御される。このように、ハイブリッド駆動状態を含むエンジン走行モードでは、変速部4が変速状態に設定されている。すなわち、変速部4の変速状態とは、少なくともエンジン1が駆動している状態を含み、そのエンジン駆動状態における前述したようなブレーキB1およびクラッチの係合あるいは開放の状態を表現したものと言い得る。
また、図3に示す「EV」はモータ走行モードを示す。そのモータ走行モードのうち前述したワンモータ走行モードでは、前進走行時、クラッチC1およびブレーキB1が開放させられるとともに、第2モータ・ジェネレータ3がモータとして動作させられ、かつ第1モータ・ジェネレータ2が発電機として機能させられる。したがって、蓄電装置の電力で第2モータ・ジェネレータ3が正回転方向に駆動され、駆動トルクとしてMG2トルクのみがカウンタシャフト8bを介して車軸11に伝達される。このワンモータ走行モードの状態を図5に共線図で示してある。なお、第1モータ・ジェネレータ2は空転させてもよい。また、このワンモータ走行モードで動力源ブレーキ作用(エンブレ作用)を生じさせる場合には、クラッチC1およびブレーキB1のうちのどちらか一方が係合させられる。例えば、ブレーキB1のみを係合させた場合、変速部4のサンギヤ4sが固定され、正方向に回転する変速部4のリングギヤ4rによってエンジン1が回転させられてエンジン1がイナーシャトルク(負方向のトルク)を出力し、そのイナーシャトルクが制動トルクとして作用する。すなわち、フットブレーキ動作に併せてエンジンブレーキ動作を実施させることができる。また、その減速時に第2モータ・ジェネレータ3を発電機として機能させれば、回生ブレーキ動作を実施させることができる。加えて、このエンジンブレーキ動作では、例えば第1モータ・ジェネレータ2が負方向に回転しかつ正方向のトルクを出力している場合など、第1モータ・ジェネレータ2を発電機として機能させることができる。したがって、ブレーキB1およびクラッチC1のうちの少なくともいずれか一方を開放させた状態、かつエンジン1の駆動を停止させた状態(燃料を燃焼させない状態)が、ワンモータ走行モードに含まれる。
モータ走行モードのうちのツーモータ走行モードでは、第1モータ・ジェネレータ2のトルク(MG1トルク)がドライブギヤ7からカウンタドリブンギヤ8aに出力されるように動力伝達するために、ブレーキB1およびクラッチC1が係合させられて変速部4の回転が固定されているため、動力分割機構5が減速機として機能し、MG1トルクが増幅されてドライブギヤ7からカウンタドリブンギヤ8aに出力される。したがって、第1モータ・ジェネレータ2は負回転方向に駆動され、かつ第2モータ・ジェネレータ3が正回転方向に駆動され、MG1トルクおよびMG2トルクがカウンタシャフト8bを介して車軸11に伝達されて車両が前進走行する。したがって、ツーモータ走行モードでは、停止されているエンジン1を連れ回すことによる動力損失を回避するためにブレーキB1およびクラッチC1を係合させてエンジン1の回転を止めている。その状態を図6に共線図で示してある。図6に示すように、減速機となる動力分割機構5において、入力要素であるサンギヤ5sに負方向のMG1トルクが作用し、反力要素であるキャリヤ5cが係合状態のブレーキB1およびクラッチC1により固定され、出力要素であるリングギヤ5rに正方向のMG2トルクが作用している。すなわち、サンギヤ5sに作用する負方向のMG1トルクは、動力分割機構5のギヤ比により増幅されて出力要素のリングギヤ5rに正方向のトルクとして作用する。このように、モータ走行モードではエンジン1が停止されているので、変速部4をニュートラル状態に設定することができる。
前述した各走行モードの切替制御は、車速と要求駆動力とにより定まる所定の切替マップを用いて実施するように構成されてよい。その切替マップでは、ワンモータ走行モードを実行する領域と、ツーモータ走行モードを実行する領域と、エンジン走行モードを実行する領域とが、車速と要求駆動力とにより決定される。要求駆動力は、アクセル開度と車速とに応じて予め定められている。また、要求駆動力は、車両の動力性能もしくは動力特性を決める要因になるものであり、車種ごと、もしくは車格ごとに設計上、定めることができる。
例えば、アクセル開度がある程度以上に大きい場合、あるいは車速がある程度以上の高車速の場合、要求駆動力および車速により決定される運転領域が、エンジン走行領域内に含まれるので、エンジン走行モードに設定される。これに対して、アクセル開度が小さいことにより要求駆動力が小さい場合、車両Veの運転領域はワンモータ走行領域内となるから、ワンモータ走行モードに設定されてエンジン1が停止される。また、要求駆動力がこれらエンジン走行領域とワンモータ走行領域との間にある場合には、車両Veの運転領域は、ツーモータ走行領域になり、ツーモータ走行モードに設定することが可能になる。このツーモータ走行領域で、各モータ・ジェネレータ2,3に蓄電装置から給電して各モータ・ジェネレータ2,3がモータとして機能するように制御される。したがって、モータ走行モードは、蓄電装置に充電量(SOC)が十分にあること、第2モータ・ジェネレータ3がトルクを出力できる状態になっていること、エンジン1を停止してもよい状態になっていることなどの条件が成立している場合に実行される。そして、車両Veが走行している場合、登降坂路などの道路状況や交通量あるいは規制速度の変化などの走行環境に応じてアクセル操作が行われ、また車速が変化するから、車両の運転領域が変化し、それに伴って走行モードが切り替えられる。
つぎに、ブレーキB1の状態を判断するための制御例について、図7を参照して説明する。図7に示すように、ECUは、ブレーキB1の状態が係合完了状態であるか否かを判断する(ステップS1)。例えば、ステップS1の処理は、ECUの記憶装置に、ブレーキB1が係合状態であることを識別できるフラグ(係合完了フラグ)が記憶されているか否かにより判断するように構成されてもよい。ブレーキB1が係合完了状態あることによりステップS1で肯定的に判断された場合、このルーチンを終了する。一方、ステップS1で否定的に判断された場合には、第1モータ・ジェネレータ2の回転数制御が完了しているか否かを判断する(ステップS2)。例えば、ステップS2の判別処理では、MG1回転数が第1目標回転数Nm1となっているか否かを判断するように構成されている。この場合、第1目標回転数Nm1は、ブレーキB1の差回転数が所定の回転数Nb1以内となるMG1回転数に設定される。ブレーキB1の差回転数は、この具体例では、変速部4のサンギヤ4sの回転数のことと言える。したがって、この第1モータ・ジェネレータ2の回転数制御とは、MG1トルクの出力方向およびトルク量を制御することによりMG1回転数を第1目標回転数Nm1にさせる制御である。その第1モータ・ジェネレータ2の回転数制御が完了していないことによりステップS2で否定的に判断された場合、その第1モータ・ジェネレータ2の回転数制御を実施し(ステップS3)、このルーチンを終了する。例えば、このステップS3における回転数制御では、負方向のMG1トルクを出力させることによりMG1回転数を負回転方向に増大させるように構成されている。すなわち、第1目標回転数Nm1は、正回転方向もしくは負回転方向で所定回転数に設定されている。
そのステップS2で肯定的に判断された場合、MG1トルクが一定となるように第1モータ・ジェネレータ2を制御する(ステップS4)。この場合、動力分割機構5の各回転要素によるトルクの増減作用が生じなければ、ステップS4におけるMG1トルクの一定制御によりMG1回転数が一定に制御される。すなわち、動力分割機構5の状態が共線図において梃子作用を生じなければ、ステップS4の制御によりMG1回転数を維持させることができる。さらに、ブレーキB1の油圧を増大させてブレーキトルクを生じさせる係合制御を実施する(ステップS5)。例えば、ステップS5の制御により、ブレーキB1の油圧を係合完了油圧に向けて上昇させる油圧指令信号PB1を出力するように構成されている。したがって、このステップS6におけるブレーキ係合制御を実施することにより生じるブレーキトルクが変速部4のサンギヤ4Sに作用するので、そのブレーキトルクによりサンギヤ4Sの回転数がブレーキB1の同期回転数へ向けて変化する。すなわち、図9に実線L2で示すように、サンギヤ4Sに作用するブレーキトルクが、梃子作用により変速部4のリングギヤ4rに作用し、かつそのリングギヤ4rを介して動力分割機構5のキャリヤ5cに作用することにより、サンギヤ5Sの回転数すなわちサンギヤ5sに連結された第1モータ・ジェネレータ2の回転数(MG1回転数)が、実線L2の状態から破線L3へ向けて変化する。
そして、MG1回転数が、ブレーキB1の同期回転数Nb2に対応する所定の回転数となったか否かを判断する(ステップS6)。例えば、その同期回転数Nb2は、前述した所定回転数Nb1以下の回転数に設定することができる。要は、ステップS6の処理では、ブレーキB1の差回転数がゼロ回転あるいはゼロ回転付近である同期回転数Nb2になっているか否かを、MG1回転数を用いて判断するように構成されている。例えば、ステップS6の処理は、MG1回転数が第2目標回転数Nm2となったか否かを判断するように構成されている。この場合、第2目標回転数Nm2の絶対値は、前述した第1目標回転数Nm1の絶対値よりも大きい値に設定される場合と、その第1目標回転数Nm1の絶対値よりも小さい値に設定される場合とがある。つまり、図9に示すように、出力要素である動力分割機構5のリングギヤ5rの回転数(出力軸回転数)が正回転方向で一定の場合、エンジン1の回転を停止させたままMG1回転数を負回転方向に増大すると、つまり一点鎖線L1の状態から実線L2,破線L3の順に状態が遷移すると、変速部4のサンギヤ4sの回転数すなわちブレーキB1およびクラッチC1における各差回転数は減少する。言い換えれば、その破線L3の状態を係合完了状態とし、一点鎖線L1および実線L2の状態を係合完了前の状態として説明すると、破線L3の状態のMG1回転数が第2目標回転数Nm2となり、その第2目標回転数Nm2の絶対値が、係合完了前の第1目標回転数Nm1となる実線L2の状態のMG1回転数の絶対値よりも大きい値になる場合を図9には示している。すなわち、図9に示す状態とは異なり、係合完了前のMG1回転数が第2目標回転数Nm2よりも大きい場合もあり、この場合には、第2目標回転数Nm2の絶対値は、第1目標回転数Nm1の絶対値よりも小さい値に設定されるように構成される。
そのMG1回転数がブレーキB1の同期回転数Nb2に対応する回転数(第2目標回転数Nm2)となっていないことによりステップS6で否定的に判断された場合、前述したステップS5における制御にリターンする。一方、MG1回転数が、ブレーキB1の同期回転数Nb2に対応する回転数となっていることによりステップS6で肯定的に判断された場合、ブレーキB1が係合完了していると判断して(ステップS7)、このルーチンを終了する。なお、ステップS7の処理により、ECUの記憶装置にブレーキB1が係合完了状態であることを識別できる係合完了フラグを記憶するように構成されてもよい。
ここで、図8を参照して、減速中の車両VeにおいてブレーキB1を開放状態から係合状態に移行させる制御を実施した場合について説明する。図8には、車両Veが減速中、第2モータ・ジェネレータ3による回生ブレーキ動作からエンジンブレーキ動作に移行する状態変化を示してある。図8に示すように、時刻t1前の車両Veは、ブレーキB1およびクラッチC1を開放させ、かつエンジン1および第1モータ・ジェネレータ2の駆動を停止させて、減速中に第2モータ・ジェネレータ2を回生制御している。すなわち、この回生ブレーキ動作を実施している状態は、前述したワンモータ走行モードに設定された状態である。この時刻t1前の状態を共線図を用いて示すと、図9に一点鎖線L1で示す状態となる。
そして、ブレーキB1を開放状態から係合状態へ移行させる制御を開始すると判断する(時刻t1)。例えば、時刻t1において、ECUは、所定の条件が成立したと判断すると図7を参照して前述した制御を開始するように構成されている。その移行制御が開始し、第1モータ・ジェネレータ2で負方向のトルクを出力させてMG1回転数を制御する(時刻t2)。この時刻t2において、前述したステップS3における制御(スタンバイ制御)が開始され、MG1回転数がゼロ回転から第1目標回転数Nm1となるように制御される、すなわちMG1回転数が負回転方向に増大させられるので、ブレーキB1の差回転数が減少し始める。加えて、時刻t2では、ブレーキB1がトルク容量を生じない程度のブレーキ油圧となるように油圧制御が開始されて油圧が上昇し始める。したがって、時刻t2において、ブレーキB1の移行制御、特にスタンバイ制御が開始される。なお、図8に示す例では、移行制御の開始を判断したタイミング(時刻t1)と開始タイミング(時刻t2)とがずれているが、その開始を判断した直後に移行制御を開始するように構成されてもよい。
そして、MG1回転数が第1目標回転数Nm1となるとスタンバイ制御が完了する(時刻t3)。すなわち、時刻t3において、MG1回転数が第1目標回転数Nm1となっているので、ブレーキB1の差回転数が所定の目標回転数Nb1になっている。この状態を共線図を用いて表すと、図9に実線L2で示す状態となる。さらに、時刻t3では、前述したステップS4における制御が開始され、MG1トルクを負方向で一定に制御される。また、一定に制御されるMG1トルクの絶対値は、時刻t2から時刻t3までのMG1トルクの絶対値よりも小さい。つまり、その時刻t3後、MG1トルクが一定に制御されていることにより、MG1回転数が一定に制御されるので、ブレーキB1の差回転数が一定になる。そして、ブレーキB1の係合完了制御が開始される(時刻t4)。この時刻t4で係合完了制御が開始されることにより、ブレーキB1の油圧が係合完了油圧に向けて上昇され始めると、ブレーキB1でトルク容量が生じ始めもしくは増大し始め、かつエンジン1が停止されていることにより、ブレーキB1で生じたトルク容量によりMG1回転数は負回転方向に増大する。そのため、MG1回転数が前述した第2目標回転数Nm2になると、ブレーキB1の係合が完了したものと判断する(時刻t5)。したがって、時刻t5において、ブレーキB1の差回転数が、所定の閾値以内、例えばゼロ回転あるいはゼロ回転付近となる同期回転数Nb2になったことが判断されている。すなわち、時刻t5において、前述したステップS6の判断処理において肯定的に判断されてステップS7の処理が実施されている。この状態を共線図を用いて表すと、図9に破線L3で示す状態となる。なお、図9などに共線図で示すように、変速部4をニュートラル状態から係合状態に切り替える際に、図7および図8を参照して説明した通りMG1回転数をパラメータにしてブレーキB1の係合状態を判断することができるように構成されている。
そして、ブレーキB1が係合完了しているので、時刻t5後に、エンジンブレーキ動作が開始される(時刻t6)。エンジンブレーキ動作を開始させることにより、第1モータ・ジェネレータ2で正方向のトルクを生じさせてエンジン回転数を上昇させる。このように、駆動を停止されたエンジン1の回転数をゼロ回転から増大させることによりエンジン1からイナーシャトルクが出力され、そのイナーシャトルク分の制動力を駆動輪に作用させることができる。
以上説明したように、この具体例におけるハイブリッド車両の制御装置によれば、差動機構の異なる回転要素に連結された第1モータ・ジェネレータと走行モードを切り替えるための係合装置とを備えているので、係合装置の差回転数が第1モータ・ジェネレータの回転数に対応するように変化するように構成されている。そのため、その差回転数に対応する第1モータ・ジェネレータの回転数を用いて係合装置が同期回転数であること、すなわち係合状態であることを精度良く判断することができる。また、油圧センサなどのセンサ装置を設けて係合装置の係合状態をセンシングしなくても、第1モータ・ジェネレータの回転数により係合装置の状態を判断できるので、そのセンサ装置を追加することによるコスト増大を防止できる。
前述した具体例では、第1モータ・ジェネレータの回転数により係合装置の係合状態を判断するように構成されている例について説明したが、この発明におけるハイブリッド車両の制御装置は、これに限定されず、以下に記載する具体例のように構成することにより、係合装置の係合状態を判断することができる。例えば、エンジン1の回転数により係合装置の係合状態を判断するように構成してもよい。この場合、ブレーキB1を開放状態から係合状態へ移行する制御を開始する際のMG1回転数に維持する制御を実施する。このMG1回転数制御中では、エンジン1の駆動が停止されているとともに、前述した共線図に示すように動力分割機構5に各回転要素の回転数は変化せず、かつブレーキB1およびエンジン1は変速部4に連結されているので、ブレーキB1の油圧上昇に伴う係合トルクが生じてブレーキB1の差回転数が減少することによりエンジン1の回転数が増大する。すなわち、ブレーキB1で生じた係合トルクによりエンジン回転数が変化する。したがって、このエンジン1の回転数変化により、例えばエンジン回転数がブレーキB1の同期回転数に対応する場合などに、係合装置が係合状態であると判断できる。
また、前述したMG1回転数制御に併せてMG1トルクの操作量に上限を設けてもよい。例えば、MG1トルクの操作量の上限値に対応した以上の係合トルクがブレーキB1で生じるとMG1回転数が変化するので、ブレーキB1の係合完了を判定できるとともにブレーキB1の伝達トルク容量を検知することもできる。あるいは、MG1トルクの操作量によりブレーキB1の係合完了を判定するように構成してもよい。例えば、前述したMG1回転数制御中にブレーキB1で係合トルクが生じることに伴い、MG1回転数を維持させるためにはMG1トルク量を変化させる必要がある。そのため、MG1トルクの変化量が予め定められた所定値を超えた場合には、ブレーキB1が係合状態に移行したと判断することができる。
さらに、変速部4における変速比に応じてブレーキB1の所定回転数差を変更するように構成してもよい。例えば、その変速比がLo側である程エンジン1の回転数変化は大きくなる。そのため、図10に示すように、その変速比がLo側である程、設定される所定回転数差を小さくする。これにより、エンジン1の回転数変化を一定にして、ブレーキB1の係合完了判定の正確性を向上させ、かつエンジン回転数の変動によるショックを軽減させることができる。
また、変速部4における変速比に応じてMG1トルクの操作量を変更するように構成してもよい。この場合、その変速比がLo側である程エンジン1へのトルク分担比が小さくなる。そのため、図11に示すように、その変速比がLo側である程MG1トルクの操作量が大きくなるように制限値を設定する。これにより、エンジントルクを一定に制御して、ブレーキB1の係合完了を判断する正確性が向上し、かつエンジン回転数の変動によるショックを軽減させることができる。
また、動力分割機構5の出力軸回転数の変化、すなわちリングギヤ5rおよびドライブギヤ7の回転数変化に応じて、イナーシャトルクを低減するためのトルク(慣性キャンセルトルク)を駆動トルクに付加させるように構成してもよい。例えば、ブレーキB1が係合過渡状態の場合、そのリングギヤ5rの回転数が低下することに伴い、ブレーキB1の差回転数が同期回転数になる。そのため、リングギヤ5rの回転数が変化することによる影響を受けないように、第1モータ・ジェネレータ2で慣性キャンセルトルクを生じるように制御する。これにより、ブレーキB1が係合状態であると誤判断することを防止できる。さらに、そのリングギヤ5rおよびドライブギヤ7の回転数変化に応じて、第1モータ・ジェネレータ2の回転数を変化させるように構成してもよい。例えば、リングギヤ5rおよびドライブギヤ7の回転数が変化した場合でも、その差回転数を一定に保つようにMG1回転数を制御するように構成されている。これにより、ブレーキB1が係合状態であること誤判断することを防止できる。
なお、動力源を構成しているエンジンと、第1モータ・ジェネレータと、第2モータ・ジェネレータとの動力性能もしくは駆動特性は互いに異なっている。例えば、エンジンは、低トルクかつ低回転数の領域から高トルクかつ高回転数の領域までの広い運転領域で運転でき、またエネルギ効率はトルクおよび回転数がある程度高い領域で良好になる。これに対してエンジンの回転数やエンジンの回転を停止させる際のクランク角度などの制御および駆動トルクとして作用する動力を出力する第1モータ・ジェネレータは、低回転数で大きいトルクを出力する特性を有する。また、駆動輪へトルクを出力する第2モータ・ジェネレータは、第1モータ・ジェネレータよりも高回転数で運転でき、かつ最大トルクが第1モータ・ジェネレータよりも小さい特性を有する。そのため、この発明で対象とする車両は、動力源を構成しているエンジンや各モータ・ジェネレータを有効に利用して、エネルギ効率あるいは燃費が良好になるように制御される。
また、共線図は、差動機構が有する複数の回転要素を縦線で示し、縦線同士の間隔をその縦線で示される回転要素同士の変速比(ギヤ比)に対応した間隔として、それらの回転要素の回転数を縦線方向の長さによって表した周知の図である。