JP6094675B2 - ハイブリッド車両 - Google Patents
ハイブリッド車両 Download PDFInfo
- Publication number
- JP6094675B2 JP6094675B2 JP2015526104A JP2015526104A JP6094675B2 JP 6094675 B2 JP6094675 B2 JP 6094675B2 JP 2015526104 A JP2015526104 A JP 2015526104A JP 2015526104 A JP2015526104 A JP 2015526104A JP 6094675 B2 JP6094675 B2 JP 6094675B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- storage unit
- power storage
- mode
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/12—Controlling the power contribution of each of the prime movers to meet required power demand using control strategies taking into account route information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/442—Series-parallel switching type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/12—Recording operating variables ; Monitoring of operating variables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/24—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries
- B60L58/25—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries by controlling the electric load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/545—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
- B60L2240/622—Vehicle position by satellite navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/26—Transition between different drive modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
- B60W20/14—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion in conjunction with braking regeneration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/18—Propelling the vehicle
- B60Y2300/182—Selecting between different operative modes, e.g. comfort and performance modes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Description
本発明は、HVモード及びEVモードを有し、取得された地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、モードの切替制御を行うハイブリッド車両に関する。
従来から、エンジンと、回転電機である走行モータとの少なくとも一方を駆動源として走行するハイブリッド車両であって、走行中にHVモードとEVモードとの切り替えを行って走行するハイブリッド車両が知られている。「HVモード」は、現在のSOCを基準SOCに維持するように、エンジン及び走行モータの駆動、エンジンにより駆動される発電機による蓄電部の充電、及び走行モータによる回生充電のそれぞれについての実行、非実行を切り替える走行モードである。「EVモード」は、エンジン及び走行モータのうち、基本的に走行モータを用いて車両を駆動し、発電機による蓄電部の充電はしない走行モードである。
特許文献1には、HVモードとEVモードとを切り替えて走行するハイブリッド車両において、ナビゲーション制御装置が、地図データを用いてSOC管理計画処理を実行することが記載されている。この処理は、目的地点から走行経路に沿って遡る連続区間でEVモードで走行した場合の蓄電部の消費電力量を算出し、目的地点で蓄電部の充電残量が所定値となるようにEVモードで走行する場合の走行開始地点を決定する。
ハイブリッド車両において、地図情報に基づいてHVモード及びEVモードを切り換えるように、所定の走行計画を作成し、この計画に基づいてモードの切替制御を行う場合、車両効率を高くできる可能性はある。しかしながら、蓄電部の状態によっては、計画に基づくモードの切替実行を行うことが不適切な場合も発生する。例えば、エンジンの始動と停止とが頻繁に繰り返されることにより、運転者に不快感を与える場合、燃費性能が悪化する場合、及び蓄電部の早期劣化を生じる場合がある。このような事情から、より適切なモードの切り換え制御を行うことが望まれる。特許文献1には、このような問題を解決する手段は開示されていない。
本発明の目的は、運転性、燃費性能及び蓄電部の耐久性を向上できるハイブリッド車両を提供することである。
本発明に係るハイブリッド車両は、HVモード及びEVモードを有し、地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御を行い、さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なることを特徴とする。また、本発明に係るハイブリッド車両は、HVモード及びEVモードを有し、地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御であって、前記地図情報と検出された車速とから、回生発電量を高くするための減速開始位置と、前記減速開始位置後に通過する減速設定点とを設定し、アクセルオフを前提として前記減速開始位置から前記減速設定点まで前記回転電機に第1回生トルクを発生させて減速させ、前記減速設定点以降で前記回転電機に前記第1回生トルクより大きい第2回生トルクを発生させて減速度を大きくする制御と、前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、前記蓄電部の出力可能電力が制限される前記所定状態は、前記蓄電部の充電残量が所定下限残量未満である低充電量状態、前記蓄電部の温度が所定下限温度未満である低温状態、及び、前記蓄電部の出力可能電力が所定下限電力未満である低出力状態のいずれか1つの状態であることを特徴とするハイブリッド車両である。また、本発明に係るハイブリッド車両は、HVモード及びEVモードを有し、地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御と、前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、さらに、前記走行計画に基づく切替制御の実行可否は、前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、前記蓄電部の出力可能電力が制限される前記所定状態は、前記蓄電部の充電残量が所定下限残量未満である低充電量状態、前記蓄電部の温度が所定下限温度未満である低温状態、及び、前記蓄電部の出力可能電力が所定下限電力未満である低出力状態の少なくともいずれか1つの状態であり、前記走行計画に基づく切替制御の実行は、前記蓄電部の予め設定した状態である前記充電残量、前記温度、または前記出力可能電力が第1閾値以上の場合に許可し、前記第1閾値未満の場合に禁止し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行は、前記充電残量、前記温度、または前記出力可能電力が第2閾値以上の場合に許可し、前記第2閾値未満の場合に禁止し、前記第1閾値は、前記第2閾値よりも大きいことを特徴とするハイブリッド車両である。また、本発明に係るハイブリッド車両は、HVモード及びEVモードを有し、地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御であって、前記地図情報と検出された車速とから、回生発電量を高くするための減速開始位置と、前記減速開始位置後に通過する減速設定点とを設定し、アクセルオフを前提として前記減速開始位置から前記減速設定点まで前記回転電機に第1回生トルクを発生させて減速させ、前記減速設定点以降で前記回転電機に前記第1回生トルクより大きい第2回生トルクを発生させて減速度を大きくする制御と、前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行と、前記走行計画に基づく切替制御の実行とが、前記所定状態に対応する前記蓄電部の予め設定した状態からは許可される場合に、前記走行計画に基づく切替制御の実行を許可し、前記一方の制御の実行を禁止することを特徴とするハイブリッド車両である。
本発明のハイブリッド車両によれば、走行計画に基づく切替制御の実行を不適当な場合に制限できるので、エンジンの始動及び停止の繰り返しの抑制によって運転性、燃費性能、及び蓄電部の耐久性の向上を図れる。
以下、本発明の実施形態について、図面を用いて説明する。なお、以下では、本発明のハイブリッド車両が、回転電機として電動モータ及び発電機の機能を有するモータジェネレータを備える場合を説明するが、回転電機として、単なる電動モータの機能を有する構造を用いることもできる。また、以下では、ハイブリッド車両が、外部電源からの充電機能を有するプラグイン型の場合を説明するが、ハイブリッド車両はプラグイン型の充電機能を持たないハイブリッド車両であってもよい。以下ではすべての図面の説明で同様の要素には同一の符号を付して説明する。
図1は、本発明の実施形態の制御システム12を搭載したハイブリッド車両10の概略構成を示している。制御システム12は、エンジン18と、第1モータジェネレータ22及び第2モータジェネレータ24と、インバータユニット26と、蓄電部であるバッテリ28と、変速レバー30と、ナビゲーション装置32と、表示部35と、制御装置50とを含む。
ハイブリッド車両10は、エンジン18及び第2モータジェネレータ24の少なくとも一方を駆動源として車輪16を駆動し走行する。以下では、第1モータジェネレータ22は「第1MG22」と記載し、第2モータジェネレータ24は「第2MG24」と記載する。
エンジン18は、ガソリンエンジンまたはディーゼルエンジンである。エンジン18は、制御装置50からの制御信号Si1により制御される。
第1MG22は、3相同期回転電機であり、主としてエンジン18により駆動され発電する発電機の機能を有する。第1MG22の発電状態では、エンジン18からのトルクの少なくとも一部が、後述する動力分割機構34を介して第1MG22の回転軸に伝達される。第1MG22の発電電力は、インバータユニット26を介してバッテリ28に供給され、バッテリ28が充電される。
第1MG22は、バッテリ28から電力を供給され駆動されることにより、動力分割機構34を介してエンジン18を始動するエンジン始動モータの機能も有する。
第2MG24は、3相同期回転電機であり、後述するEVモードの実行時に駆動される。第2MG24は、バッテリ28からの電力を供給されて駆動され、車両の駆動力を発生するモータの機能を有する。第2MG24は、制動時の電力回生用の発電機の機能も有する。第2MG24の発電電力も、インバータユニット26を介してバッテリ28に供給され、バッテリ28が充電される。第1MG22及び第2MG24として、誘導回転電機、または別の回転電機を用いることもできる。
動力伝達機構14は、動力分割機構34、動力分割機構34に連結された出力軸36、出力軸36に連結された減速機38、及び車軸40を含む。動力分割機構34は、遊星歯車機構により構成される。遊星歯車機構は、サンギヤ、ピニオンギヤ、キャリア、及びリングギヤを含む。例えば、サンギヤは、第1MG22の中空の回転軸の端部に接続される。キャリアは、エンジン18の駆動軸に接続される。リングギヤは、出力軸36に接続され、出力軸36は、直接に、または図示しない歯車減速機を介して第2MG24の回転軸に接続される。出力軸36は、減速機38を介して車輪16に連結された車軸40に接続される。動力分割機構34は、エンジン18からの動力を、出力軸36への経路と第1MG22への経路とに分割する。
インバータユニット26は、第1MG22及び第2MG24とバッテリ28との間に接続される。インバータユニット26は、第1MG22及びバッテリ28の間に接続される図示しない第1インバータと、第2MG24及びバッテリ28の間に接続される図示しない第2インバータとを含み、制御装置50からの制御信号Si2により制御される。
第1インバータは、バッテリ28から供給された直流電圧を交流電圧に変換して第1MG22に供給し、第1MG22を駆動する。第1インバータは、第1MG22がエンジン18の駆動に伴って発電した場合に、その発電により得られた交流電圧を直流電圧に変換し、その変換した直流電圧をバッテリ28に供給する機能も有する。
第2インバータは、同様にバッテリ28からの直流電圧を交流電圧に変換して第2MG24に供給し、第2MG24を駆動する。第2インバータは、ハイブリッド車両10の回生制動時に、第2MG24により回生発電した交流電圧を直流電圧に変換し、その変換した直流電圧をバッテリ28に供給する機能も有する。各インバータの動作は、制御信号Si2により制御される。この場合、後述の制御装置50が第2MG24の回生トルクを制御することで第2MG24が回生発電し、車輪16に回生制動力が発生する。第2MG24の回生発電は、走行時に後述のアクセルペダルが非操作となった場合に行うことができる。第1インバータ及び第2インバータとバッテリ28との間に、バッテリ28の電圧を昇圧して各インバータに出力したり、各インバータから供給された電圧を降圧してバッテリ28に供給するDC/DCコンバータを接続してもよい。
バッテリ28は、ニッケル水素電池またはリチウムイオン電池により構成され、第1MG22及び第2MG24に第1インバータまたは第2インバータを介して接続される。バッテリ28は、各インバータを介して第1MG22及び第2MG24に電力を供給可能とする。バッテリ28の正極側には、図示しないバッテリ電流センサが取り付けられ、バッテリ電流センサは、充放電電流を検出し、その検出値を制御装置50に送信する。制御装置50は、この充放電電流の積算値からバッテリ28の充電残量であるSOC(state of
charge)を算出する。
charge)を算出する。
SOCは、バッテリ28の電圧を検出する電圧センサの検出値と、バッテリ電流センサの検出値とから算出してもよい。なお、蓄電部としてキャパシタを用いることもできる。
温度センサ80は、バッテリの温度Tbを検出し、その検出値を表す信号は制御装置に送信される。
電力変換装置82は、外部電源84からの交流電力を直流電力に変換し、バッテリ28へ直流電力を出力し、バッテリ28を充電する機能を有する。電力変換装置82は、制御装置50からの制御信号により制御される。この場合、車両の停止状態で、外部電源84に接続されたケーブル86に設けられたコネクタ88が、電力変換装置82に接続されたコネクタ90に接続されることによって、外部電源84からバッテリ28への充電が可能となる。
アクセル位置センサ41は、アクセルペダルの操作量を決定するアクセル位置APを検出し、そのアクセル位置APを表す信号は制御装置50に送信される。
車輪速度センサ42は、車輪16の単位時間当たりの回転数Vvを検出し、回転数Vvを表す信号は制御装置50に送信される。制御装置50は、回転数Vvに基づいて車速Vcを算出する。制御装置50は、第2MG24の回転数を検出する図示しない第2回転センサの検出値に基づいて車速Vcを算出してもよい。
変速レバー30は、操作によってR位置、N位置、D位置、M位置及びB位置のいずれか1つに切替可能である。変速レバー30の位置は図示しない位置センサによって検出され、検出位置を表す信号は制御装置50に送信される。D位置は標準前進走行モードであるDレンジモードに対応する。
ナビゲーション装置32は、ハイブリッド車両10が目的地に向けて走行することを支援し、現在位置から目的地までの走行経路と、到達所要時間とを提供する。ナビゲーション装置32は、図示しないGPSセンサから現在位置を取得する。ナビゲーション装置32は、道路の勾配情報及び法定速度を含む道路情報、交差点位置情報、信号機位置情報、一時停止位置情報を含む地図情報を記憶しており、地図情報に現在位置を照合して、地図内での現在位置を特定する。ナビゲーション装置32は、ユーザの操作によって目的地情報を取得し、目的地までの走行経路と到達所要時間とを算出する。ナビゲーション装置32は、図示しない方位センサからハイブリッド車両10の向きを取得する。
また、ナビゲーション装置32は、走行経路上の車両の進行方向前方に交差点、信号機、一時停止位置のいずれか1つが近くにある場合に、その交差点または信号機の直前の停止位置、または一時停止位置を、車両10の目標停止位置として設定することができる。ナビゲーション装置32は、信号機の赤信号情報を含むインフラ情報を取得して、車両前方の信号機が赤信号である場合にその信号機の直前の停止位置を目標停止位置として設定してもよい。例えばインフラ情報は電波により外部の送信設備から受信されることができる。ナビゲーション装置32は、現在位置及び目標停止位置を含む情報を表す信号をCAN通信線によって制御装置50に送信する。
表示部35は、ディスプレイであり、後述する地図情報に基づく計画切替制御の実行または非実行を運転者に通知する機能を有する。なお、表示部35は、車両10の速度を含む情報を表示する機能を持ってもよい。
制御装置50は、ECUと呼ばれるもので、CPUと、メモリを有する記憶部とを有するマイクロコンピュータを含む。図示の例では、制御装置50を1つの制御装置として示しているが、制御装置50は適宜複数の構成要素に分割して、互いに信号ケーブルで接続する構成としてもよい。制御装置50は、エンジン18を制御するエンジン制御部52、第1MG22及び第2MG24を制御するMG制御部54、走行計画作成部56、モード切替制御部58、切替制御制限部60を有する。走行計画作成部56、モード切替制御部58、及び、切替制御制限部60は後で説明する。
エンジン制御部52は、エンジン18に出力する制御信号Si1を生成し、MG制御部54は、インバータユニット26に出力する制御信号Si2を生成する。DC/DCコンバータが用いられる場合、制御信号Si2によってDC/DCコンバータの動作も制御される。
制御装置50は、運転者の操作として、アクセルペダルの操作に基づく走行要求出力Preqに応じてエンジン18、第1MG22及び第2MG24の駆動を制御する。具体的には、制御装置50は、アクセル位置APと車速Vcとに基づいて、予め記憶部で記憶されたマップまたは関係式に基づいて走行に要求される走行要求トルクTr*を算出する。走行要求トルクTr*は、出力軸36に出力されるトルクである。制御装置50は、走行要求トルクTr*と、第2MG24の回転数自体、または第2MG24の回転数から算出される回転数である出力軸36の回転数とから走行要求出力Preqを算出する。制御装置50は、走行要求出力Preqが出力軸36に出力されるように、エンジン18、第1MG22、及び第2MG24の駆動を制御する。
制御装置50は、走行要求出力Preqに、バッテリ28のSOCから基準SOCに近づけるための充放電要求電力を加えた出力を、目標エンジン出力Pe*として算出し、所定のエンジン高効率マップからエンジン18の目標回転数Ne*及び目標トルクTe*を算出する。制御装置50は、エンジン18の目標回転数Ne*と、第1MG22の回転数Vm1及び第2MG24の回転数Vm2の検出値と、走行要求トルクTr*とから、所定の関係式を用いて第1MG22の目標回転数Vm1*及び目標トルクTr1*と、第2MG24の目標トルクTr2*とを算出する。エンジン18の目標回転数Ne*及び目標トルクTe*と、第1MG22の目標回転数Vm1*及び目標トルクTr1*と、第2MG24の目標トルクTr2*とは、アクセル位置APまたはアクセル位置APと車速Vcとに基づいて、図示しない記憶部によって記憶されたマップから算出してもよい。
制御装置50は、算出されたエンジン18の目標回転数Ne*及び目標トルクTe*をエンジン制御部52に出力し、エンジン制御部52は、目標回転数Ne*及び目標トルクTe*が得られるように制御信号Si1でエンジン18の駆動を制御する。また、制御装置50は、算出された第1MG22の目標回転数Vm1*及び目標トルクTr1*と、第2MG24の目標トルクTr2*とをMG制御部54に出力し、MG制御部54は、目標回転数Vm1*及び目標トルクTr1*,Tr2*が得られるように制御信号Si2で第1MG22及び第2MG24の駆動を制御する。
これによって、アクセルペダルの操作量が小さい場合または車速Vvが低い場合では、エンジン18が停止した状態で、第2MG24のみを駆動源として車両が走行する。また、制御装置50は、SOCが基準SOCよりも低い場合に、エンジン18を駆動して第1MG22による発電を行い、発電電力をバッテリ28に充電する。
また、アクセルペダルの操作量が大きい場合または車速Vvが高い場合にエンジン18が駆動され、エンジン18を駆動源として車両が走行する。この場合、制御装置50は、必要に応じてエンジン18とともに第2MG24を駆動させることで、両方を駆動源として車両が走行する。
ハイブリッド車両10は、走行モードとして、HVモード及びEVモードを有する。「HVモード」は、CSモードとも呼ばれるもので、エンジン18及び第2MG24の少なくとも一方を駆動源として車両が走行するモードである。HVモードでは、車両の走行中に、現在のSOC(以下、「現在SOC」という。)、または現在SOCを中心とする所定範囲内のSOCを維持するように、エンジン18及び第2MG24の駆動と、エンジン駆動による第1MG22の発電と、制動時の第2MG24の回生発電との実行及び非実行を切り替えて制御する。例えば現在SOCが所定範囲の下限を下回った場合には、エンジン18の駆動によって第1MG22で発電させ、その発電電力をバッテリ28に充電する。逆に現在SOCが所定範囲の上限を上回った場合には、エンジン18を停止して第2MG24の駆動によってバッテリ28の充電電力を消費する。
「EVモード」は、CDモードとも呼ばれるもので、第2MG24のみを駆動源として車両が走行するモードである。EVモードでは、車両の走行中に、バッテリ28のSOCを維持せずに、積極的に第2MG24で消費する。この場合、エンジン18は駆動されない。なお、EVモードでも、アクセルペダルの操作量が大きい場合、または車速が高い場合には、車両の走行要求出力を確保するためにエンジン18の出力も用いて車両を走行させるようにすることもできる。この場合でもエンジン18の駆動によってバッテリ28を充電することはしない。
制御装置50は、所定のEVモード開始条件を満たすことを前提に、EVモードを選択し、SOCがEVモード閾値よりも低い値である「HVモード閾値」以下となるまで、EVモードで走行するようにエンジン18、第1MG22及び第2MG24を制御する。これによって、後述する図4(B)(C)の「制御なし」で示すように、EVモードの実行後、SOCが所定値以下に低下した状態でHVモードに移行する。また、「EVモード開始条件」は、現在SOCが予め設定された「EVモード閾値」以上であり、かつ、バッテリ温度が所定温度範囲内であり、かつ、バッテリ出力可能電力が所定値以上であるとすることができる。なお、EVモードとHVモードとの切り替えは、車両で自動で実行される場合に限定するものではなく、運転者が図示しないEV−HV切換スイッチを操作することによって、手動でモード切替可能としてもよい。
走行計画作成部56は、現在SOCがEVモード閾値以上である場合に、ナビゲーション装置32から取得した現在位置、目的地、及び目的地までの走行経路を含む地図情報に基づいて、HVモード及びEVモードを切り替えるように、所定の走行計画を作成し、記憶部に記憶する。「走行計画」は、後述の車両効率である「EV走行効率」が高くなるように作成される。モード切替制御部58は、この走行計画に基づいてモードの切替制御を行う。
より具体的には、走行計画作成部56は、取得された地図情報に基づいて、車両が目的地に向かう場合の走行経路において、連続する複数の経路要素を求める。走行計画作成部56は、複数の経路要素において、予め設定された関係から算出されるEV走行効率が高くなるように走行計画を作成する。この場合、走行計画は、将来走行経路におけるEV走行効率が高くなることを重視して作成される。
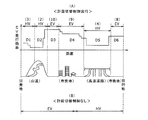
これについて、図2を用いてさらに詳しく説明する。図2は、走行計画に基づく切替制御である計画切替制御を実行する場合(A)と、計画切替制御を行わない場合(B)とにおけるモード切替を示している。図2では、1例として、山道、市街地、及び高速道路を通過するように、出発地から目的地までの走行経路が設定されている。走行経路は、予め設定した条件にしたがって連続する複数の経路要素D1、D2・・・D6に分割される。
制御装置50は、各経路要素D1、D2・・・D6において、道路勾配及び法定速度から、予測平均車速と、走行時に車両に加わる予測負荷とを算出し、記憶する。制御装置50は、各経路要素D1、D2・・・D6において、車両がEV走行した場合のエネルギ効率に対応し、車両効率である「EV走行効率」を算出し、記憶する。「EV走行効率」は、予測平均車速と予測負荷とに基づいて所定の関係式で算出される。EV走行効率は、予測平均車速が低くなるほど高くなり、予測平均車速が高くなるほど低くなる関係を有する。EV走行効率は、予測負荷が低くなるほど高くなり、予測負荷が高くなるほど低くなる。
制御装置50は、EV走行効率、予測平均車速、及び予測負荷の関係を表すマップのデータを予め制御装置50の記憶部に記憶している。制御装置50は、ナビゲーション装置32から取得した地図情報から複数の経路要素D1、D2・・・D6での予測平均車速及び予測負荷を算出し、マップのデータからそれぞれのEV走行効率を算出する。
図2(A)では各経路要素において、(3)(2)・・・のようにEV走行効率が高い場合に高くなる点数を設定している。図2(A)に示すように、負荷が高くなる山道、及び車速が高くなる高速道路では、EV走行効率が低い。このため、点数が(3)(2)(4)と低い。一方、車速が低く、かつ道路勾配が小さい市街地では、EV走行効率は高い。このため、点数が(10)(9)(8)と高い。
走行計画作成部56は、各経路要素のうち、EV走行効率が最高で、点数が最高の経路要素(例えばD3)から効率が低くなる順に1つまたは複数を選択し、選択した経路要素(例えばD3,D4,D6)にEVモードを設定し、残りの経路要素(例えばD1,D2,D5)にHVモードを設定するように走行計画を作成する。この走行計画では、選択した経路要素(例えばD3,D4,D6)の全体でEVモードを実行した場合に、出発地で残っていたSOCとHVモード閾値のSOCとの差分を使い切れるようにする。好ましくは、走行計画では、目的地の直前で、出発地で残っていたSOCとHVモード閾値のSOCとの差分を使い切れるようにする。
モード切替制御部58は、走行計画に基づいて目的地までの走行経路で、HVモード及びEVモードの切り替え制御である計画切替制御を行う。
さらに、切替制御制限部60は、バッテリ28の出力可能電力が制限される所定状態にある場合に、計画切替制御の実行を制限する。例えば、「所定状態」は、SOCが所定下限残量未満である「低充電量状態」、バッテリ28の温度が所定下限温度未満である「低温状態」、バッテリ28の温度が所定上限温度を上回る「高温状態」、及びバッテリ28の出力可能電力である出力上限電力が所定下限電力未満である「低出力状態」の少なくともいずれか1つの状態である。例えばSOCの「所定下限残量」は、EVモード開始の判定基準である上記の「EVモード閾値」よりも低い。
例えばバッテリ28が所定状態にある場合、切替制御制限部60は計画切替制御の制限として、計画自体を作成せずに計画切替制御を開始しないか、または切替を行うモードの実行を遅延するか、またはすでに計画切替制御の実行中である場合にはその制御を中断または中止する。制御装置50は、地図情報に基づく計画切替制御の中断または中止がされた場合に、表示部35にその中断または中止を表示させることで運転者に通知してもよい。
なお、計画切替制御の「制限」とは、このように運転者に計画切替制御の中断または中止を通知して、計画切替制御の実行または非実行を運転者に明示的に示すものに限定するものではなく、例えば走行計画自体を変更して、それ以前に作成された所定の走行計画どおりにモード切替制御を行わないようにすることも含む意味である。
図3は、計画切替制御の開始前と実行中とで計画切替制御が制限される例を示している。図3では、バッテリ状態として、バッテリ28の温度が「通常のEVモードを実行できない」低温または高温である不適当な温度の場合、計画切替制御の開始前では走行計画を作成せず、計画切替制御を開始しない。この場合、バッテリ28の温度が所定下限温度未満である「低温状態」、または所定上限温度を上回る「高温状態」にある。なお、「通常のEVモードを実行できない」とは、計画切替制御を実行しない場合にEVモードを開始するための開始条件を満たさないことを意味する(以下、同様である)。
バッテリ28の温度が通常のEVモードを実行できない低温または高温である場合、計画切替制御の実行中では、計画切替制御を中断する。この場合、車両は、EVモードの実行時にエンジン18が駆動されるのと同様に動作し、早期にSOCが「HVモード閾値」に達してHVモードを連続させる走行に移行する。なお、「中断」とは、バッテリ28が計画切替制御を制限する所定状態でなくなった場合に、計画切替制御の実行を再開することができる意味である。また、バッテリ温度に応じてバッテリ28の内部抵抗が異なるため、計画切替制御の実行可否の判定基準である「所定下限温度」は、システムの効率向上を期待できる温度から設定される。
また、バッテリ28の出力可能電力Woutが通常のEVモードを実行できない低出力である場合も、バッテリ28の温度が不適当な温度の場合と同様に、計画切替制御の開始前及び実行中で、走行計画が作成されないか、または中断される。この場合、バッテリ28の出力可能電力が所定下限電力未満である「低出力状態」にある。出力可能電力は、SOC、充放電電流の検出値、及びバッテリ電圧の検出値から算出可能である。
また、バッテリ28のSOCが通常のEVモードを実行できない低充電状態である場合、計画切替制御の開始前で実行開始が禁止され、実行中である場合には、HVモードに移行後に切替計画制御が中止され、終了する。この場合、バッテリ28のSOCが所定下限残量未満である「低充電量状態」にある。この場合、モード切替制御部58は、SOCが所定下限残量以上まで回復しても計画切替制御は再開せず、SOCが「EVモード閾値」以上になり、しかもバッテリ状態を含む図3の計画切替制御を制限する状態でない場合に、計画切替制御を再開することができる。
図4は、出発地から目的地までの残距離(A)と、計画切替制御を実行しない場合のSOC(B)及び走行モード(C)と、計画切替制御実行の場合のSOC(D)と、EV走行効率(E)と、計画切替制御実行の場合の走行モード(F)とを示している。図4に示すように、出発地から目的地までの走行経路が設定され、目的地でSOCが所定のEVモード開始条件を満たす場合に、計画切替制御が実行されない場合には、(B)(C)に示すように、EVモード開始後、SOCが所定のEVモード閾値以下に低下した状態で、HVモードに移行する。
一方、制御装置50は、(E)のEV走行効率に基づいて、(F)のモード切替を行う走行計画を作成する。この場合、(E)で破線D1,D2,D3,D4で囲んだ部分に対応する経路要素がEV走行効率の高い部分として選択され、EVモードとして設定され、残りの経路要素にHVモードが設定される。
制御装置50は、走行計画に基づいて計画切替制御を実行する。この場合、(D)に示すように、車両が目的地に向かって走行する場合にSOCはHVモードでほぼ一定に維持され、EVモードでSOCが徐々に低下し、これが目的地まで繰り返される。この場合、目的地直前で、出発地に残っていたSOCでHVモード閾値までのSOCを使い切ることが可能となる。このため、車両の燃費性能が向上する。
一方、図3で説明したように、計画切替制御の実行中に、バッテリ温度が所定下限温度未満であるなどの計画切替制御が制限される所定状態を満たした場合には、切替制御制限部60によって計画切替制御が制限される。図5は、図4の(D)に対応する場合において、計画切替制御が中断された場合のSOC(A)と走行モード(B)とを示している。図4(D)(E)のE1,E2に対応する地点で計画切替制御が制限される所定状態を満たした場合、例えばバッテリ温度が所定下限温度未満である場合に、計画切替制御が図5(A)のF1に対応して中断される。この場合、HVモードからEVモードに切り換えられ、SOCがEVモード閾値以下に低下した後、目的地までHVモードの連続状態に移行する。なお、図示は省略するが、計画切替制御を遅延する場合、例えば、EVモード実行中において、SOCを回復するためのHVモードに切り換えて、SOCがEVモード閾値以上に回復した状態で、将来走行経路におけるEV走行効率に基づいて走行計画を再作成し、その走行計画に基づいて、計画切替制御を実行することができる。
このように制御装置50は、SOCの所定下限残量、バッテリ温度の所定下限温度、または出力可能電力の所定下限電力を第1閾値とした場合に、地図情報に基づく計画切替制御の実行可否を、バッテリ28の予め設定した状態が第1閾値以上か否かで判定する。このようにバッテリ28の出力可能電力が制限される所定状態にある場合に、計画切替制御の実行を制限するので、計画切替制御の実行を不適当な場合に制限できる。このため、計画切替制御の実行における厳しい成立条件を満たすためにエンジン18の始動及び停止を頻繁に繰り返す必要がなくなる。このため、この繰り返しの抑制によって運転性、燃費性能、及びバッテリ28の耐久性の向上を図れる。
なお、図5では、計画切替制御の実行を制限される例として、「スイッチ」、「モード」、「その他」の例も示している。例えば計画切替制御の実行開始前では、図示しないEV−HV切換スイッチ、EV市街地スイッチ、SOC回復スイッチの少なくともいずれか1つがオンされた場合、計画切替制御は開始しない。また、同じ場合で計画切替制御の実行中では計画切替制御の実行を中断する。これによって、運転者のスイッチ操作に基づく意思を優先させることができる。「EV市街地スイッチ」は市街地走行用のEVモードの実行を指示するスイッチである。「SOC回復スイッチ」は、SOCを増大するHVモードの実行を指示するスイッチである。
また、計画切替制御の実行を行わない場合でHVモードに移行した場合、計画切替制御は実行を開始しない。この場合、SOCを増大させるHVモードでSOCが増大し、EVモード閾値以上となった場合で、目的地がナビゲーション装置で設定された場合に、目的地までの距離が所定値以上であることを前提に、計画切替制御を実行する。
また、制御装置50で車両の故障を検出するセンサからの検出値の入力によって、車両の故障が検出された場合には、計画切替制御の実行開始前では計画切替制御を開始せず、実行中では計画切替制御を中断する。
次に、実施形態において、別の制御である回生量拡大制御と、充電目標変更制御との少なくとも一方の制御を組み合わせる場合を説明する。この場合、図1を参照して、制御装置は、回生量拡大制御部62及び充電目標変更制御部64を有する。制御装置50は、回生量拡大制御部62及び充電目標変更制御部64の一方のみを有する構成でもよい。
まず、回生量拡大制御部62について説明する。回生量拡大制御部62は、ナビゲーション装置32から現在位置及び目標停止位置を含む地図情報を取得する。回生量拡大制御部62は、走行経路における運転者の動作による停止及び減速の位置である、目標停止位置及び減速開始点を予測または設定して、目標停止位置までの第2MG24の回生発電を制御することによりバッテリ28における充電可能な回生発電量を拡大させる回生量拡大制御を行う。
図6は、ナビゲーション装置32で記憶される走行経路上の目標停止位置と、減速開始位置との関係を示している。図6では、ナビゲーション装置32で記憶される地図情報において、破線で示すように走行経路が設定され、走行経路上に信号機71及び一時停止位置72が設定される。この場合、ハイブリッド車両10の現在位置がPであり、矢印α方向に進行する場合に、例えば現在位置から最も近いQ位置の信号機71の直前の停止ライン74が目標停止位置として設定される。
ナビゲーション装置32は、車両がある頻度以上に停止される一時停止位置を含む特定の停止位置を記憶する学習機能を持ち、特定の停止位置が現在位置の前方にある場合に目標停止位置として設定してもよい。制御装置50は、ナビゲーション装置32から目標停止位置及び現在位置を含む情報を取得する。
回生量拡大制御部62は、取得された目標停止位置及び現在位置と検出された車速とから、予め設定された関係式またはマップを用いて、予測された目標停止位置までのバッテリ28で回収可能な第2MG24による回生発電量を高くするための減速開始位置(ST1)を設定する。また、回生量拡大制御部62は、減速開始位置から回生発電を増大する時間である減速設定点tdと、減速設定点tdから増大させる回生発電に対応する回生トルクとを算出する。回生量拡大制御部62は、算出された減速設定点tdと回生トルクとに基づいて、運転者がアクセルペダルを非操作とした、すなわちアクセルオフしたことを前提条件として、第2MG24の回生発電を大きくするように制御する。この場合、回生量拡大制御部62は第2インバータを制御する。なお、減速設定点td及び減速開始位置を制御装置50で求めるのではなく、ナビゲーション装置32で推定し、それを制御装置50に送信してもよい。
図7は、目標停止位置でハイブリッド車両10を停止させる場合において、回生量拡大制御の許可及び禁止の場合を比較して、車速が時間にしたがって低下する状態を示している。図7において、破線L1はDレンジモードで走行する場合で、回生量拡大制御を行わない場合の減速状態である。破線L1は、減速設定点td以前で実線L2の回生量拡大制御を実行する場合と一致する。この場合、時間t1で運転者がアクセルオフとした後、時間t2で運転者がブレーキペダルを踏み込んで目標停止位置に対応する停止時点でハイブリッド車両10を停止させる。
破線L1のように回生量拡大制御を行わない場合、例えば時間tdとt3との間の時間t2でブレーキペダルが踏み込まれる場合に、踏み込み時の車速が高いので、t2から停止時点までの減速の程度が大きくなる。第2MG24の回生発電量は、所定時間当たりに車速が低下する程度である減速度が増大するにしたがって大きくなるが、バッテリ28に電力が供給される速度である充電速度には許容上限がある。このため、減速度が許容上限に対応する所定値を超える場合、バッテリ28に充電されない無駄な発電電力が発生するので、燃費性能向上の面から改良の余地がある。
図7の実線L2は、破線L1に対して回生量拡大制御を行う場合を示している。この場合、回生量拡大制御部62は、減速設定点td以降で、第2MG24の回生トルクをそれ以前よりも大きくして減速度が大きくなるように、第2インバータの制御によって回生発電を制御する。この場合、ハイブリッド車両10を減速させる方向に働くエンジンブレーキに相当する制動トルクが大きくなる。このため、比較的早期に減速度が大きくなることによって、車速が比較的緩やかに低下するので、停止直前でも運転者は時間t3でブレーキペダルを強く踏み込む必要がなく、ハイブリッド車両10の速度が急減少することがない。このため、地図情報に基づいてバッテリ28における充電可能な回生発電量を拡大でき、燃費性能を向上できる。
回生量拡大制御部62は、ブレーキペダルを踏み込んだ場合の減速度の推定値がバッテリ28の充電速度の許容上限に対応する減速度よりも小さい所定値となるように、減速設定点tdを設定する。このような回生量拡大制御の実行においては、運転者の意図しない減速を回避するために、運転者がアクセルオフとすることが前提となる。また、このような減速度の大きさ及び減速設定点tdは車速に応じて異なる。例えば車速が高いほど減速設定点tdは現在位置から近い位置に設定する必要がある。このような理由から、回生量拡大制御部62は、検出された車速と、現在位置及び目標停止位置とに基づいて減速設定点tdを算出し、減速設定点tdから増大させる回生発電に対応する回生トルクを算出して、第2MG24の回生発電を制御する。
一方、制御装置50は、地図情報に基づく計画切替制御の実行可否を、バッテリ28の予め設定した状態が第1閾値以上か否かで判定する。例えば、制御装置50は、バッテリ温度が第1閾値である所定下限温度以上、またはSOCが第1閾値である所定下限残量以上、またはバッテリ28の出力可能電力が第1閾値である所定下限電力以上である場合に計画切替制御を実行すると判定する。逆に、制御装置50は、バッテリ温度が所定下限温度未満、またはSOCが所定下限残量未満である、または出力可能電力が所定下限電力未満である場合に、計画切替制御を禁止すると判定する。
この場合、制御装置50は、地図情報に基づく回生量拡大制御の実行可否を、バッテリ28の予め設定した状態、例えばバッテリ28のSOC、バッテリ温度、または出力可能電力が第1閾値とは異なる第2閾値以上か否かで判定する。例えば、制御装置50は、バッテリ温度が第2閾値であり、所定下限温度とは異なる第2所定下限温度以上、またはSOCが第2閾値であり、所定下限残量とは異なる第2所定下限残量以上、またはバッテリ28の出力可能電力が第2閾値であり、所定下限電力とは異なる第2所定下限電力以上である場合に回生量拡大制御を実行すると判定する。逆に、制御装置50は、バッテリ温度が第2所定下限温度未満、またはSOCが第2所定下限残量未満、または出力可能電力が第2所定下限電力未満である場合に、回生量拡大制御を禁止すると判定する。
このような構成によれば、地図情報に基づく回生量拡大制御と計画切替制御とのそれぞれで、バッテリ28の状態を考慮して制御の実行許可条件を設定するので、地図情報に基づく制御を実行するタイミングを最適化でき、過度に禁止されることを防止できる。
また、バッテリ温度に対応する所定下限温度は第2所定下限温度より大きくし、SOCに対応する所定下限残量は第2所定下限残量より大きくし、出力可能電力に対応する所定下限電力は第2所定下限電力より大きくしてもよい。
この場合、地図情報に基づく計画切替制御の実行条件が、回生量拡大制御の実行条件よりも厳しくなるので、地図情報に基づく制御を実行するタイミングをより最適化できる。
次に、充電目標変更制御部64(図1)について説明する。充電目標変更制御部64は、ナビゲーション装置32から現在位置と、所定値以上の勾配を持つ特定降坂路位置を含む地図情報を取得する。充電目標変更制御部64は、走行経路における特定降坂路位置の情報に基づいて、バッテリ28のSOCの制御目標値を変更する充電目標変更制御を行う。
図8は、充電目標変更制御を行う場合の走行経路上の特定降坂路76及び車両位置と、車両位置に対応するSOCとの関係を示している。特定降坂路76を車両が矢印方向に進行して降りる場合、アクセルオフによる第2MG24の回生発電によってSOCが急激に上昇する。一方、ハイブリッド車両10が特定降坂路76の手前に位置する場合にSOCが十分に高い場合、特定降坂路76での走行により得られる発電量をバッテリ28で十分に回収できず、無駄になるおそれがある。
充電目標変更制御部64は、取得された現在位置及び特定降坂路76の位置から、ハイブリッド車両10が特定降坂路76の前の所定距離以内にある場合に、SOCの制御目標値である基準SOCを所定値以下に低下させるように、第2MG24を積極的に駆動させるEV走行を行うように制御する。これによって、車両のU1位置からU2位置までの間でSOCを十分に低下させ、特定降坂路76の開始位置であるU3位置から終了位置であるU4位置までに回生発電により得られる電力をバッテリ28で十分に回収できる。このため、効率のよい走行を実現できる。
なお、制御装置50はナビゲーション装置32から渋滞位置を有する渋滞情報を含むインフラ情報を取得して、ハイブリッド車両10が渋滞位置の前の所定距離以内にある場合に、特定降坂路76の場合と同様に、基準SOCを所定値以下に低下させるように制御する構成としてもよい。この場合も、渋滞位置で車両が減速するので、回生発電により得られる電力をバッテリ28で十分に回収できる。
また、上記で説明したように、制御装置50が地図情報に基づく計画切替制御の実行可否を、バッテリ28の予め設定した状態が第1閾値以上か否かで判定する構成とした場合に、充電量変更制御の実行可否を、バッテリ28の予め設定した状態が第1閾値とは異なる第2閾値以上か否かで判定する構成としてもよい。この場合、バッテリ28の予め設定した状態は、例えばバッテリ28のSOC、バッテリ温度、または出力可能電力である。
例えば、制御装置50は、バッテリ温度が第2閾値であり、所定下限温度とは異なる第2所定下限温度以上、またはSOCが第2閾値であり、所定下限残量とは異なる第2所定下限残量以上、またはバッテリ28の出力可能電力が第2閾値であり、所定下限電力とは異なる第2所定下限電力以上である場合に、充電量変更制御を実行すると判定する。逆に、制御装置50は、バッテリ温度が第2所定下限温度未満、またはSOCが第2所定下限残量未満、または出力可能電力が第2所定下限電力未満である場合に、充電量変更制御を禁止すると判定する。
この構成によれば、地図情報に基づく充電量変更制御と計画切替制御とのそれぞれで、バッテリ28の状態を考慮して制御の実行許可条件を設定するので、地図情報に基づく制御を実行するタイミングを最適化でき、過度に禁止されることを防止できる。
また、この場合も、回生量拡大制御及び計画切替制御を行う場合と同様に、バッテリ温度に対応する所定下限温度は第2所定下限温度より大きくし、SOCに対応する所定下限残量は第2所定下限残量より大きくし、出力可能電力に対応する所定下限電力は第2所定下限電力より大きくしてもよい。
この場合、地図情報に基づく計画切替制御の実行条件が、充電量変更制御の実行条件よりも厳しくなるので、地図情報に基づく制御を実行するタイミングをより最適化できる。
また、制御装置50は、地図情報に基づく回生発電拡大制御及び充電目標変更制御の一方の制御の実行と、計画切替制御の実行とが、バッテリ28の予め設定した状態からは許可される場合に、計画切替制御の実行を許可し、回生発電拡大制御及び充電目標変更制御の一方の制御を禁止する構成としてもよい。
図9は、計画切替制御及び回生量拡大制御(または充電目標変更制御)の実行可否を判定する方法を示すフローチャートである。
制御装置50は、図9のフローチャートで示す方法を予め記憶部で記憶したプログラムにより実行することができる。図9では、バッテリ28の温度条件で制御の実行可否を判定する場合を説明するが、SOCまたは出力可能電力で制御の実行可否を判定する場合も同様である。以下では、回生量拡大制御(または充電目標変更制御)を単に回生量拡大制御として説明する。
S10でバッテリ温度Tbが、回生量拡大制御の実行可否の判定基準である、第2所定下限温度TL2以上であるか否かが判定される。第2所定下限温度TL2は、計画切替制御の実行可否の判定基準である、所定下限温度TL1よりも小さい(TL2<TL1)。
回生量拡大制御の実行可否を判定する場合、渋滞時にエンジン駆動と停止とを繰り返す間欠運転走行を可能とするようなバッテリ28の出力可能電力、または予め設定した降坂路の降坂時に回生発電による電力をバッテリ28で十分に回収できるようにするためのSOCから、所定下限温度TL1を設定することができる。
一方、充電目標変更制御の実行可否を判定する場合、回生制動時の回生発電を拡大してもバッテリ28で十分に回生発電による電力を回収できるようにするためのバッテリ温度、またはアクセルオフでの吹き上げと呼ばれる過度な制動力の増大を生じないようにするためのバッテリ温度から、所定下限温度TL1を設定することができる。
S10の判定結果が否定である場合、S14で計画走行制御及び回生量拡大制御の両方の実行が禁止される。
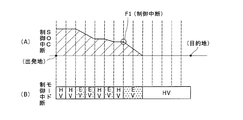
図10は、図9に対応して、バッテリ温度Tbと、計画切替制御及び回生量拡大制御の実行可否との関係を示している。図10で○は実行を許可することを、Xは実行を禁止することを示している。図10の(C)で示すように、バッテリ温度TbがTL2未満の場合、図9のS14に対応して、計画走行制御及び回生量拡大制御の両方の実行が禁止される。
図9のS10の判定結果が肯定である場合、バッテリ温度Tbが所定下限温度TL1以上か否かが判定され(S12)、その判定結果が肯定である場合、S16で計画走行制御の実行は許可されるが、回生量拡大制御の実行は禁止される。この場合、図10の(A)に示す場合に対応する。
一方、S12の判定結果が否定である場合、S18で計画走行制御の実行が禁止されるが、回生量拡大制御の実行は許可される。この場合、図10の(B)に示す場合に対応する。
このような構成によれば、回生発電拡大制御及び充電目標変更制御の一方の制御の実行と、計画切替制御の実行とが、バッテリ28の予め設定した状態によって競合する場合に、計画切替制御の実行を優先させることができる。
以上、本発明を実施するための形態について説明したが、本発明はこうした実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において、種々の形態で実施できるのは勿論である。例えば、ナビゲーション装置32では、信号機位置及び信号機の赤信号情報を含むインフラ情報を受信し、制御装置50がインフラ情報から車両前方にある信号機の赤信号情報を取得する構成としてもよい。この場合、回生発電拡大制御及び充電目標変更制御の少なくとも一方を行う場合に、信号機直前と推測される位置を目標停止位置として計算し、目標停止位置までの距離及び車速の検出値を用いて減速制御を実行したり、目標停止位置の前で基準SOCを低下させることができる。
10 ハイブリッド車両、12 制御システム、14 動力伝達機構、16 車輪、18 エンジン、22 第1モータジェネレータ(第1MG)、24 第2モータジェネレータ(第2MG)、26 インバータユニット、28 バッテリ、30,30A 変速レバー、32 ナビゲーション装置、34 動力分割機構、35 表示部、36 出力軸、38 減速機、40 車軸、41 アクセル位置センサ、42 車輪速度センサ、50 制御装置、52 エンジン制御部、54 MG制御部、56 走行計画作成部、58 モード切替制御部、60 切替制御制限部、62 回生量拡大制御部、64 充電目標変更制御部、71 信号機、72 一時停止位置、74 停止ライン、76 特定降坂路、80 温度センサ、82 電力変換装置、84 外部電源、86 ケーブル、88,90 コネクタ。
Claims (7)
- HVモード及びEVモードを有し、
地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、
EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、
前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御を行い、
さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なることを特徴とするハイブリッド車両。 - HVモード及びEVモードを有し、
地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、
EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、
前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御であって、前記地図情報と検出された車速とから、回生発電量を高くするための減速開始位置と、前記減速開始位置後に通過する減速設定点とを設定し、アクセルオフを前提として前記減速開始位置から前記減速設定点まで前記回転電機に第1回生トルクを発生させて減速させ、前記減速設定点以降で前記回転電機に前記第1回生トルクより大きい第2回生トルクを発生させて減速度を大きくする制御と、前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、
さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、
前記蓄電部の出力可能電力が制限される前記所定状態は、前記蓄電部の充電残量が所定下限残量未満である低充電量状態、前記蓄電部の温度が所定下限温度未満である低温状態、及び、前記蓄電部の出力可能電力が所定下限電力未満である低出力状態のいずれか1つの状態であることを特徴とするハイブリッド車両。 - HVモード及びEVモードを有し、
地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、
EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、
前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御と、前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、
さらに、前記走行計画に基づく切替制御の実行可否は、前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、
前記蓄電部の出力可能電力が制限される前記所定状態は、前記蓄電部の充電残量が所定下限残量未満である低充電量状態、前記蓄電部の温度が所定下限温度未満である低温状態、及び、前記蓄電部の出力可能電力が所定下限電力未満である低出力状態の少なくともいずれか1つの状態であり、
前記走行計画に基づく切替制御の実行は、前記蓄電部の予め設定した状態である前記充電残量、前記温度、または前記出力可能電力が第1閾値以上の場合に許可し、前記第1閾値未満の場合に禁止し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行は、前記充電残量、前記温度、または前記出力可能電力が第2閾値以上の場合に許可し、前記第2閾値未満の場合に禁止し、
前記第1閾値は、前記第2閾値よりも大きいことを特徴とするハイブリッド車両。 - HVモード及びEVモードを有し、
地図情報に基づいてHVモード及びEVモードを切り替えるように、所定の走行計画を作成し、前記走行計画に基づいてモードの切替制御を行うハイブリッド車両であって、
EVモードの実行時に駆動される回転電機に接続される蓄電部の出力可能電力が制限される所定状態にある場合に、前記走行計画に基づくモードの切替制御の実行を制限し、
前記地図情報に基づいて、運転者の停止及び減速を予測または設定して前記回転電機の回生発電を制御することにより前記蓄電部において充電可能な回生発電量を拡大させる制御であって、前記地図情報と検出された車速とから、回生発電量を高くするための減速開始位置と、前記減速開始位置後に通過する減速設定点とを設定し、アクセルオフを前提として前記減速開始位置から前記減速設定点まで前記回転電機に第1回生トルクを発生させて減速させ、前記減速設定点以降で前記回転電機に前記第1回生トルクより大きい第2回生トルクを発生させて減速度を大きくする制御と、前記地図情報の降坂路位置に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との少なくとも一方の制御を行い、
さらに、前記走行計画に基づく切替制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第1閾値以上か否かで判定し、前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行可否は、前記所定状態に対応する前記蓄電部の予め設定した状態が第2閾値以上か否かで判定し、前記第1閾値と前記第2閾値とは異なり、
前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行と、前記走行計画に基づく切替制御の実行とが、前記所定状態に対応する前記蓄電部の予め設定した状態からは許可される場合に、前記走行計画に基づく切替制御の実行を許可し、前記一方の制御の実行を禁止することを特徴とするハイブリッド車両。 - 請求項2または請求項3のいずれか1に記載のハイブリッド車両において、
前記地図情報に基づいて前記蓄電部における充電可能な回生発電量を拡大させる制御と前記地図情報に基づいて前記蓄電部の充電残量の制御目標値を変更する制御との一方の制御の実行と、前記走行計画に基づく切替制御の実行とが、前記所定状態に対応する前記蓄電部の予め設定した状態からは許可される場合に、前記走行計画に基づく切替制御の実行を許可し、前記一方の制御の実行を禁止することを特徴とするハイブリッド車両。 - 請求項1から請求項5のいずれか1に記載のハイブリッド車両において、
前記走行計画は、将来走行経路における車両効率が高くなることを重視して作成されることを特徴とするハイブリッド車両。 - 請求項1から請求項6のいずれか1に記載のハイブリッド車両において、
走行停止状態で外部電源から前記蓄電部への外部充電を可能とすることを特徴とするハイブリッド車両。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/069034 WO2015004782A1 (ja) | 2013-07-11 | 2013-07-11 | ハイブリッド車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015004782A1 JPWO2015004782A1 (ja) | 2017-02-23 |
| JP6094675B2 true JP6094675B2 (ja) | 2017-03-15 |
Family
ID=52279504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015526104A Active JP6094675B2 (ja) | 2013-07-11 | 2013-07-11 | ハイブリッド車両 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9849870B2 (ja) |
| JP (1) | JP6094675B2 (ja) |
| WO (1) | WO2015004782A1 (ja) |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9849870B2 (en) * | 2013-07-11 | 2017-12-26 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle having switch control function of travel mode based on map information |
| FR3008369B1 (fr) * | 2013-07-12 | 2015-06-26 | Renault Sa | Commande du couple transmis a une roue motrice d'un vehicule a motorisation hybride |
| JP5999057B2 (ja) * | 2013-09-24 | 2016-09-28 | トヨタ自動車株式会社 | 移動支援装置、移動支援方法、及び運転支援システム |
| KR102130179B1 (ko) * | 2014-01-16 | 2020-07-03 | 두산인프라코어 주식회사 | 하이브리드 건설기계의 휠 구동장치 및 휠 구동방법 |
| US20160167645A1 (en) * | 2014-12-12 | 2016-06-16 | Hyundai Motor Company | Apparatus and method of controlling conversion of driving mode of plug-in hybrid electric vehicle |
| JP6365332B2 (ja) * | 2015-02-05 | 2018-08-01 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6213494B2 (ja) * | 2015-02-18 | 2017-10-18 | トヨタ自動車株式会社 | ハイブリッド車両 |
| CN106143475B (zh) * | 2015-03-25 | 2019-01-11 | 比亚迪股份有限公司 | 混合动力汽车及其驱动控制方法和装置 |
| JP6451449B2 (ja) * | 2015-03-30 | 2019-01-16 | アイシン・エィ・ダブリュ株式会社 | 車両制御システム、方法およびプログラム |
| JP6369411B2 (ja) * | 2015-07-22 | 2018-08-08 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2017024571A (ja) * | 2015-07-22 | 2017-02-02 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US10843680B2 (en) * | 2016-06-07 | 2020-11-24 | Lenovo (Singapore) Pte. Ltd. | Managing battery and engine power to propel vehicle based on upcoming road feature |
| DE102016218555A1 (de) * | 2016-09-27 | 2018-03-29 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Energiebordnetzes |
| DE102016222827A1 (de) | 2016-11-18 | 2018-05-24 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs und Kraftfahrzeug |
| US20180162432A1 (en) * | 2016-12-08 | 2018-06-14 | Wal-Mart Stores, Inc. | Self-charging shopping cart system with power assist |
| US10384668B2 (en) * | 2017-03-31 | 2019-08-20 | Ford Global Technologies, Llc | Electric-only driving when approaching frequent destinations |
| JP6683175B2 (ja) * | 2017-05-17 | 2020-04-15 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US10300907B2 (en) | 2017-08-04 | 2019-05-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Deceleration control in a hybrid vehicle |
| US10392003B2 (en) | 2017-08-04 | 2019-08-27 | Toyota Motor Engineering & Manufacturing North America, Inc. | Navigation-enhanced battery state of charge maintenance |
| US10507820B2 (en) | 2017-08-04 | 2019-12-17 | Toyota Motor Engineering & Manufacturing North America, Inc. | Vehicle mass and road load estimation in an EV condition |
| US10618512B2 (en) | 2017-08-04 | 2020-04-14 | Toyota Motor Engineering & Manufacturing North America, Inc. | Expanding electric vehicle mode during downhill grade conditions |
| KR102030239B1 (ko) * | 2017-09-01 | 2019-10-08 | 현대자동차주식회사 | 태양전지 발전량 예측을 통한 차량 배터리 관리 방법 |
| KR102355425B1 (ko) * | 2017-09-29 | 2022-01-26 | 현대자동차주식회사 | 하이브리드 자동차 및 그를 위한 엔진 제어 방법 |
| JP6919492B2 (ja) * | 2017-10-18 | 2021-08-18 | トヨタ自動車株式会社 | 燃料電池車両および燃料電池車両の制御方法 |
| JP6596480B2 (ja) * | 2017-11-29 | 2019-10-23 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP6992460B2 (ja) * | 2017-12-05 | 2022-01-13 | トヨタ自動車株式会社 | ハイブリッド自動車およびこれに搭載される制御装置 |
| JP7013826B2 (ja) | 2017-12-05 | 2022-02-01 | トヨタ自動車株式会社 | ハイブリッド自動車およびこれに搭載される制御装置 |
| JP7053279B2 (ja) * | 2018-01-15 | 2022-04-12 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| JP2019142307A (ja) * | 2018-02-19 | 2019-08-29 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6939689B2 (ja) * | 2018-04-19 | 2021-09-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US11117566B2 (en) * | 2018-05-08 | 2021-09-14 | Ford Global Technologies, Llc | Methods and systems of a hybrid vehicle |
| EP3853059A1 (en) * | 2018-09-21 | 2021-07-28 | Epower Engine Systems Inc | Ai-controlled multi-channel power divider / combiner for a power-split series electric hybrid heavy vehicle |
| JP7035962B2 (ja) * | 2018-10-31 | 2022-03-15 | トヨタ自動車株式会社 | ハイブリッド車両の移動支援装置 |
| US11548494B2 (en) * | 2019-02-11 | 2023-01-10 | Ford Global Technologies, Llc | Lap learning for vehicle energy management optimization |
| KR20210002908A (ko) * | 2019-07-01 | 2021-01-11 | 현대자동차주식회사 | 차량용 배터리 관리 시스템 및 그의 배터리 관리 방법과 그를 포함하는 차량 |
| JP2021046077A (ja) * | 2019-09-18 | 2021-03-25 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP7294020B2 (ja) * | 2019-09-18 | 2023-06-20 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP7059313B2 (ja) * | 2020-03-17 | 2022-04-25 | 本田技研工業株式会社 | 車両の制御装置 |
| DE102021106190B3 (de) | 2021-03-15 | 2022-05-05 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung und Verfahren zur Prädiktion und Vermeidung der Degradation von elektrischen Antriebskomponenten im Fahrzeug |
| JP2022191935A (ja) * | 2021-06-16 | 2022-12-28 | 日野自動車株式会社 | 運転モード制御装置 |
| CN113665499A (zh) * | 2021-08-31 | 2021-11-19 | 中国第一汽车股份有限公司 | 一种电动汽车能量管理系统及控制方法 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3099694B2 (ja) | 1995-09-22 | 2000-10-16 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP4692192B2 (ja) | 2005-09-30 | 2011-06-01 | トヨタ自動車株式会社 | ハイブリッド車両バッテリ充放電制御システム |
| JP2007168743A (ja) * | 2005-12-26 | 2007-07-05 | Toyota Motor Corp | ハイブリッド車両の駆動制御装置 |
| JP4788643B2 (ja) | 2007-04-23 | 2011-10-05 | 株式会社デンソー | ハイブリッド車両用の充放電制御装置および当該充放電制御装置用のプログラム |
| JP4228086B1 (ja) * | 2007-08-09 | 2009-02-25 | トヨタ自動車株式会社 | 車両 |
| JP2009220788A (ja) | 2008-03-18 | 2009-10-01 | Toyota Motor Corp | ハイブリッド車両 |
| DE102008050737A1 (de) * | 2008-10-08 | 2010-04-15 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren zum Betreiben eines Antriebsstrangs |
| JP2010241396A (ja) * | 2009-04-10 | 2010-10-28 | Toyota Motor Corp | ハイブリッド車両の電源システム |
| US8825243B2 (en) * | 2009-09-16 | 2014-09-02 | GM Global Technology Operations LLC | Predictive energy management control scheme for a vehicle including a hybrid powertrain system |
| DE102011018769A1 (de) * | 2011-04-27 | 2012-10-31 | Daimler Ag | Hybridantriebssteuervorrichtung |
| WO2013018198A1 (ja) | 2011-08-02 | 2013-02-07 | トヨタ自動車株式会社 | 運転支援装置 |
| WO2013035729A1 (ja) * | 2011-09-05 | 2013-03-14 | 本田技研工業株式会社 | ハイブリッド車両の制御装置および制御方法 |
| JP2013052798A (ja) * | 2011-09-05 | 2013-03-21 | Honda Motor Co Ltd | ハイブリッド車両の制御装置および制御方法 |
| EP2785570B1 (en) * | 2011-12-02 | 2022-09-14 | Power Technology Holdings, LLC | System for and method of fuel optimization in a hybrid vehicle |
| JP5609898B2 (ja) * | 2012-01-26 | 2014-10-22 | トヨタ自動車株式会社 | 走行制御装置 |
| JP5992604B2 (ja) * | 2012-05-08 | 2016-09-14 | ボルボ ラストバグナー アーベー | ハイブリッド電気車両のエネルギー管理システムおよび燃料節約方法 |
| EP2847027A4 (en) * | 2012-12-18 | 2015-12-30 | Emerald Automotive Llc | OPTIMIZATION OF A LARGE AUTONOMOUS ELECTRIC VEHICLE |
| FR3005296B1 (fr) * | 2013-05-03 | 2016-10-07 | Renault Sa | Procede d'optimisation de la consommation energetique d'un vehicule hybride |
| US9849870B2 (en) * | 2013-07-11 | 2017-12-26 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle having switch control function of travel mode based on map information |
| US9404426B2 (en) * | 2013-12-31 | 2016-08-02 | General Electric Company | Methods and systems for enhancing control of power plant generating units |
| US9878631B2 (en) * | 2014-02-25 | 2018-01-30 | Elwha Llc | System and method for predictive control of an energy storage system for a vehicle |
| US20150276420A1 (en) * | 2014-03-31 | 2015-10-01 | Ford Global Technologies, Llc | Crowd sourced energy estimation |
| US9266443B2 (en) * | 2014-03-31 | 2016-02-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for adaptive battery charge and discharge rates and limits on known routes |
| US9695760B2 (en) * | 2014-03-31 | 2017-07-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for improving energy efficiency of a vehicle based on known route segments |
| JP2015198501A (ja) * | 2014-04-01 | 2015-11-09 | トヨタ自動車株式会社 | 車両の制御装置 |
| US9469289B2 (en) * | 2014-04-14 | 2016-10-18 | Ford Global Technologies, Llc | Energy reservation coordination for hybrid vehicle |
| US9327712B2 (en) * | 2014-04-22 | 2016-05-03 | Alcatel Lucent | System and method for control of a hybrid vehicle with regenerative braking using location awareness |
| KR20150133539A (ko) * | 2014-05-20 | 2015-11-30 | 현대자동차주식회사 | 차량의 회생제동 제어 방법 및 장치 |
| KR101601473B1 (ko) * | 2014-08-25 | 2016-03-09 | 현대자동차주식회사 | 하이브리드 차량용 배터리의 충방전 보정 제어 장치 및 방법 |
| US9643511B2 (en) * | 2014-12-17 | 2017-05-09 | Samsung Electronics Co., Ltd. | Method and apparatus for estimating state of charge (SOC) of battery in electric vehicle |
| US10175054B2 (en) * | 2015-01-11 | 2019-01-08 | Microsoft Technology Licensing, Llc | Predicting and utilizing variability of travel times in mapping services |
-
2013
- 2013-07-11 US US14/901,107 patent/US9849870B2/en active Active
- 2013-07-11 JP JP2015526104A patent/JP6094675B2/ja active Active
- 2013-07-11 WO PCT/JP2013/069034 patent/WO2015004782A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US20160137185A1 (en) | 2016-05-19 |
| WO2015004782A1 (ja) | 2015-01-15 |
| JPWO2015004782A1 (ja) | 2017-02-23 |
| US9849870B2 (en) | 2017-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6094675B2 (ja) | ハイブリッド車両 | |
| JP5811148B2 (ja) | 回生発電機付車両 | |
| JP4341704B2 (ja) | ハイブリッド車両およびハイブリッド車両の制御方法 | |
| EP2774802B1 (en) | Vehicle and vehicle control method | |
| JP6620126B2 (ja) | ハイブリッド車両 | |
| US20150019097A1 (en) | Control system for vehicle | |
| JP6380447B2 (ja) | ハイブリッド車両 | |
| JP5765194B2 (ja) | 車両および車両の制御方法 | |
| CN108944903B (zh) | 混合动力车辆 | |
| WO2013065167A1 (ja) | 車両および車両の制御方法 | |
| JP2009143563A (ja) | ハイブリッド車両 | |
| JP2010241396A (ja) | ハイブリッド車両の電源システム | |
| JP6028328B2 (ja) | ハイブリッド車両 | |
| JP5729475B2 (ja) | 車両および車両の制御方法 | |
| JP2013086688A (ja) | ハイブリッド車両の駆動装置 | |
| JP4858060B2 (ja) | 車両の駆動トルク制御装置 | |
| WO2013065166A1 (ja) | 車両および車両の制御方法 | |
| JP2007185986A (ja) | 車両の制御装置 | |
| KR102539294B1 (ko) | 하이브리드 차량의 타력주행시 회생제동의 제어 장치 및 그 방법 | |
| JP2011116223A (ja) | ハイブリッド電気自動車の制御装置 | |
| JP2014111413A (ja) | ハイブリッド電気自動車の走行制御装置 | |
| JP2008149978A (ja) | ハイブリッド車両の制御装置 | |
| JP2018154230A (ja) | ハイブリッド車両の制御システム | |
| JP2015116871A (ja) | ハイブリッド電気自動車の制御装置 | |
| JP5772519B2 (ja) | 車両および車両の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170130 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6094675 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |