JP6000472B2 - 車両安全装置制御ユニット - Google Patents
車両安全装置制御ユニット Download PDFInfo
- Publication number
- JP6000472B2 JP6000472B2 JP2015544848A JP2015544848A JP6000472B2 JP 6000472 B2 JP6000472 B2 JP 6000472B2 JP 2015544848 A JP2015544848 A JP 2015544848A JP 2015544848 A JP2015544848 A JP 2015544848A JP 6000472 B2 JP6000472 B2 JP 6000472B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit board
- housing
- safety device
- vehicle safety
- electronic component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P1/00—Details of instruments
- G01P1/02—Housings
- G01P1/023—Housings for acceleration measuring devices
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mounting Of Printed Circuit Boards And The Like (AREA)
- Regulating Braking Force (AREA)
- Vibration Prevention Devices (AREA)
Description
101 …車両
102A、102B …プリテンショナ
104 …ステアリングホイール
107 …助手席エアバッグ
108A、108B …カーテンエアバッグ
114、214 …ECU
116 …回路基板
120 …筐体
124 …カバー
130A、130B、130C、130D …ネジ
132、134、136 …側壁
138 …コネクタ
140、142 …フランジ
150、151 …加速度センサ
152 …天面
154 …ドミノ
156、158 …端子
160、162 …リード線
163、165 …保持部
164 …コンデンサ
166、186 …頂点
170 …三角錐
172、174、176 …角部
190 …円錐
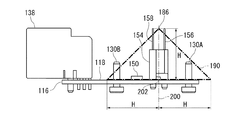
図7は図4の回路基板116の拡大図であり、本発明の第1の実施形態を例示する図である。図7に例示するように、加速度センサ150は、図4および図5に例示した筐体120の天面152の保持部163、165にドミノ154が保持された位置(本実施形態では端子156の先端)を頂点166とする三角錐170の内部空間に配置されている。この「配置されている」とは、三角錐170の内部空間に加速度センサ150の全体あるいは大部分が包含されていることが望ましいが、加速度センサ150の一部が三角錐170の内部空間に包含されている状態も含む。
図9は図4の回路基板116の側面図であり、本発明の第2の実施形態を例示する図である。図9に例示するように、加速度センサ150は、図4および図5に例示した筐体120の天面152の、ドミノ154が保持された位置(本実施形態では端子156・158の先端のちょうど中間)を頂点186とする円錐190の内部空間に配置されている。この「配置されている」とは、円錐190の内部空間に加速度センサ150の全体あるいは大部分が包含されていることが望ましいが、加速度センサ150の一部が円錐190の内部空間に包含されている状態も含む。
第1および第2の実施形態によれば、ドミノ154は、回路基板116のスペースが足りないなど、何らかの事情で筐体120の天面152に取り付けられたコンデンサ164を回路基板116に電気的に接続させる役割を果たす。言い換えれば、回路を立体的に構成したときに回路基板116と筐体120との間を橋渡しするドミノ154を利用して、その近傍に加速度センサ150を配置することにより、加速度センサ150の出力を安定させることができる。
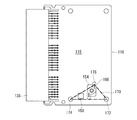
図11は図4の回路基板116に別の加速度センサ151を追加したECU214の平面図である。図11(a)は筐体120が回路基板116の表面118を被覆した状態であり、図11(b)は回路基板116から筐体120を除去した状態である。図11(b)に例示するように、ECU214には、加速度センサ150だけでなく、別の加速度センサ151が搭載されている。加速度センサ151は、加速度センサ150と異なり、第1および第2の実施形態でそれぞれ例示した三角錐170または円錐190の内部空間には配置されていない。
Claims (8)
- 車両用安全装置を制御する車両安全装置制御ユニットにおいて、
回路基板と、
前記回路基板の表面または裏面に搭載されたセンサと、
前記回路基板を被覆する筐体と、
前記回路基板の周縁を前記筐体の周縁部に固定する複数の固定具と、
前記回路基板の表面に搭載され前記筐体の天面方向に延び該天面から突出する保持部に保持される第1の電子部品とを備え、
第1の電子部品の前記筐体の天面に最も近い上端部を頂点とする三角錐であって、該頂点から前記回路基板に向かう垂線の該回路基板の表面との交点の角部と、前記複数の固定具のうち2つの固定具の位置の2つの角部から構成される三角形を底面とする三角錐の内部空間に前記センサが配置されていることを特徴とする車両安全装置制御ユニット。 - 第1の電子部品は、前記筐体の天面に最も近い上端部を2つ有し、前記三角錐は、前記2つの上端部のうち、前記2つの固定具からより遠い上端部を前記頂点とすることを特徴とする請求項1に記載の車両安全装置制御ユニット。
- 車両用安全装置を制御する車両安全装置制御ユニットにおいて、
回路基板と、
前記回路基板の表面または裏面に搭載されたセンサと、
前記回路基板を被覆する筐体と、
前記回路基板の周縁を前記筐体の周縁部に固定する複数の固定具と、
前記回路基板の表面に搭載され前記筐体の天面方向に延び該天面から突出する保持部に保持される第1の電子部品とを備え、
第1の電子部品が保持された位置を頂点とする円錐であって、前記複数の固定具のうち第1の電子部品に近い少なくとも2つの固定具を内包する円を底面とする円錐の内部空間に前記センサが配置されていることを特徴とする車両安全装置制御ユニット。 - 車両用安全装置を制御する車両安全装置制御ユニットにおいて、
回路基板と、
前記回路基板の表面または裏面に搭載されたセンサと、
前記回路基板を被覆する筐体と、
前記回路基板の周縁を前記筐体の周縁部に固定する複数の固定具と、
前記回路基板の表面に搭載され前記筐体の天面方向に延び該天面から突出する保持部に保持される第1の電子部品とを備え、
第1の電子部品が保持された位置を頂点とする円錐であって、前記頂点から前記回路基板に向かう垂線の該回路基板の表面との交点を中心とし前記頂点から交点までの距離に等しい半径を有する円を底面とする円錐の内部空間に前記センサが配置されていることを特徴とする車両安全装置制御ユニット。 - 前記筐体の天面に取り付けられリード線を有する第2の電子部品をさらに備え、
第1の電子部品の上端には、第2の電子部品のリード線に電気的に接続し、前記筐体の天面から突出する保持部に保持される端子が形成されていることを特徴とする請求項1から4のいずれか1項に記載の車両安全装置制御ユニット。 - 前記端子の先端が前記頂点であることを特徴とする請求項5に記載の車両安全装置制御ユニット。
- 第2の電子部品はコンデンサであることを特徴とする請求項5または6に記載の車両安全装置制御ユニット。
- 前記センサは加速度センサであることを特徴とする請求項1から7のいずれか1項に記載の車両安全装置制御ユニット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013227778 | 2013-10-31 | ||
| JP2013227778 | 2013-10-31 | ||
| PCT/JP2014/073137 WO2015064203A1 (ja) | 2013-10-31 | 2014-09-03 | 車両安全装置制御ユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6000472B2 true JP6000472B2 (ja) | 2016-09-28 |
| JPWO2015064203A1 JPWO2015064203A1 (ja) | 2017-03-09 |
Family
ID=53003816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015544848A Expired - Fee Related JP6000472B2 (ja) | 2013-10-31 | 2014-09-03 | 車両安全装置制御ユニット |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6000472B2 (ja) |
| DE (1) | DE112014004998T5 (ja) |
| WO (1) | WO2015064203A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017132283A (ja) * | 2016-01-25 | 2017-08-03 | 株式会社デンソー | 乗員保護システム用制御装置 |
| WO2021171822A1 (ja) * | 2020-02-28 | 2021-09-02 | 株式会社Jvcケンウッド | ナビゲーション装置及びナビゲーション装置の製造方法 |
| CZ310044B6 (cs) * | 2022-01-06 | 2024-06-12 | Výzkumný a zkušební letecký ústav, a.s. | Šasi senzoru kapacitního mikroakcelerometru |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006036792A1 (de) * | 2006-08-07 | 2008-02-14 | Trw Automotive Gmbh | Verfahren zum Herstellen eines Sensors und Sensor |
| JP5378864B2 (ja) * | 2009-04-03 | 2013-12-25 | 富士通テン株式会社 | 車載用電子機器の筐体構造 |
| JP5318720B2 (ja) * | 2009-09-30 | 2013-10-16 | 富士通テン株式会社 | 電子制御装置 |
| JP2012177652A (ja) * | 2011-02-28 | 2012-09-13 | Keihin Corp | 電子制御装置 |
-
2014
- 2014-09-03 JP JP2015544848A patent/JP6000472B2/ja not_active Expired - Fee Related
- 2014-09-03 WO PCT/JP2014/073137 patent/WO2015064203A1/ja not_active Ceased
- 2014-09-03 DE DE112014004998.0T patent/DE112014004998T5/de active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015064203A1 (ja) | 2017-03-09 |
| WO2015064203A1 (ja) | 2015-05-07 |
| DE112014004998T5 (de) | 2016-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5184286B2 (ja) | 筐体固定構造 | |
| JP5318720B2 (ja) | 電子制御装置 | |
| JP5378864B2 (ja) | 車載用電子機器の筐体構造 | |
| US20120292469A1 (en) | Fastening Assembly for a Sensor Assembly and Sensor Assembly | |
| CN102356012B (zh) | 驾乘员束缚装置控制装置 | |
| US5706181A (en) | Sensor unit for controlling an occupant protection system of a motor vehicle | |
| JP6000472B2 (ja) | 車両安全装置制御ユニット | |
| JP6136402B2 (ja) | センサーユニット、電子機器、および移動体 | |
| JP2010132202A (ja) | センサ装置およびこれを備える車両 | |
| JP2018199431A (ja) | 車体前部構造 | |
| WO2021132594A1 (ja) | 電子装置 | |
| JP2012177652A (ja) | 電子制御装置 | |
| JP7698974B2 (ja) | 制御装置 | |
| JP2018072170A (ja) | 慣性力センサ装置 | |
| JP2017083361A (ja) | 慣性力センサ装置 | |
| JP2004294419A (ja) | センサ装置 | |
| CN111316082B (zh) | 压力传感器以及具有压力传感器的移动装置 | |
| JP2018133373A (ja) | 電子装置 | |
| KR101609341B1 (ko) | 미세 시스템을 위한 3차원 방진 플랫폼 구조물 | |
| JP2015210161A (ja) | 慣性力センサ装置 | |
| JP2007322146A (ja) | センサモジュール | |
| US20220268800A1 (en) | Hybrid sensor assembly for use with active noise cancellation | |
| JP5270649B2 (ja) | 乗員拘束装置用の制御装置 | |
| JP5966864B2 (ja) | 電子装置 | |
| US12492903B2 (en) | Navigation device and method of manufacturing navigation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160830 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6000472 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |