JP5798397B2 - 電磁誘導式絶対位置測定用エンコーダ - Google Patents
電磁誘導式絶対位置測定用エンコーダ Download PDFInfo
- Publication number
- JP5798397B2 JP5798397B2 JP2011161399A JP2011161399A JP5798397B2 JP 5798397 B2 JP5798397 B2 JP 5798397B2 JP 2011161399 A JP2011161399 A JP 2011161399A JP 2011161399 A JP2011161399 A JP 2011161399A JP 5798397 B2 JP5798397 B2 JP 5798397B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- scale
- absolute position
- electromagnetic induction
- coils
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005259 measurement Methods 0.000 title claims description 19
- 230000005674 electromagnetic induction Effects 0.000 title claims description 12
- 230000005540 biological transmission Effects 0.000 claims description 25
- 230000008859 change Effects 0.000 claims description 5
- 230000004907 flux Effects 0.000 claims description 3
- 239000011295 pitch Substances 0.000 description 10
- 230000009467 reduction Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000006698 induction Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2073—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
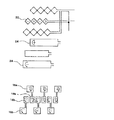
12…グリッド
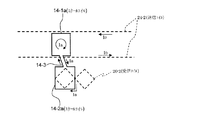
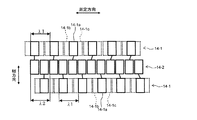
14−1、14−2…スケールコイル
14−1a、14−2a…本体コイル
14−1b、14−1c、14−2b、14−2c…付加コイル
14−3…接続コイル
20−1、20−2…受信コイル
24−1、24−2…送信コイル
Claims (2)
- スケール上に、測定方向に沿って互いに異なるスケールピッチで多数配列された2列以上のスケールコイルと、
前記スケールに対して測定方向に相対移動自在なグリッド上に、前記スケールコイルと対向するように配設された送信コイル及び受信コイルとを備え、
前記送信コイルを励磁した時に、前記スケールコイルを経由して前記受信コイルで検出される磁束の変化から、前記スケールに対する前記グリッドの絶対位置測定を可能とする2つ以上のトラックを有する電磁誘導式絶対位置測定用エンコーダにおいて、
少なくとも1つのトラックの前記スケールコイルの測定方向の少なくとも片側に閉じられたコイル配線を付加したことを特徴とする電磁誘導式絶対位置測定用エンコーダ。 - 前記スケールコイルの測定方向両側に閉じられたコイル配線を付加したことを特徴とする請求項1に記載の電磁誘導式絶対位置測定用エンコーダ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011161399A JP5798397B2 (ja) | 2011-07-22 | 2011-07-22 | 電磁誘導式絶対位置測定用エンコーダ |
| US13/550,040 US8928311B2 (en) | 2011-07-22 | 2012-07-16 | Electromagnetic induction type absolute position measuring encoder |
| EP12177166.1A EP2549239B1 (en) | 2011-07-22 | 2012-07-19 | Electromagnetic induction type absolute position measuring encoder |
| CN201210254896.7A CN102889899B (zh) | 2011-07-22 | 2012-07-20 | 电磁感应式绝对位置测量用编码器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011161399A JP5798397B2 (ja) | 2011-07-22 | 2011-07-22 | 電磁誘導式絶対位置測定用エンコーダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013024782A JP2013024782A (ja) | 2013-02-04 |
| JP5798397B2 true JP5798397B2 (ja) | 2015-10-21 |
Family
ID=46940206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011161399A Expired - Fee Related JP5798397B2 (ja) | 2011-07-22 | 2011-07-22 | 電磁誘導式絶対位置測定用エンコーダ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8928311B2 (ja) |
| EP (1) | EP2549239B1 (ja) |
| JP (1) | JP5798397B2 (ja) |
| CN (1) | CN102889899B (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5809479B2 (ja) * | 2011-08-03 | 2015-11-11 | 株式会社ミツトヨ | 電磁誘導式絶対位置測定用エンコーダ |
| DE102013218768A1 (de) * | 2013-09-19 | 2015-03-19 | Dr. Johannes Heidenhain Gmbh | Induktive Positionsmesseinrichtung |
| US9733317B2 (en) * | 2014-03-10 | 2017-08-15 | Dmg Mori Seiki Co., Ltd. | Position detecting device |
| US9435663B2 (en) * | 2014-08-22 | 2016-09-06 | Mitutoyo Corporation | Absolute position encoder scale having layers in a stacked configuration |
| US9612136B1 (en) * | 2015-09-30 | 2017-04-04 | Mitutoyo Corporation | Absolute position encoder including a redundant spatial phase signal |
| JP6234497B2 (ja) * | 2016-03-15 | 2017-11-22 | Thk株式会社 | エンコーダ装置及びエンコーダ装置付き運動案内装置 |
| US10612943B2 (en) * | 2016-08-24 | 2020-04-07 | Mitutoyo Corporation | Winding and scale configuration for inductive position encoder |
| US10520335B2 (en) * | 2016-08-24 | 2019-12-31 | Mitutoyo Corporation | Winding configuration for inductive position encoder |
| US10775199B2 (en) * | 2016-08-24 | 2020-09-15 | Mitutoyo Corporation | Winding and scale configuration for inductive position encoder |
| JP6877829B2 (ja) * | 2017-03-23 | 2021-05-26 | 株式会社ミツトヨ | 電磁誘導型変位検出装置およびこれを用いた測定器 |
| US10690517B2 (en) * | 2017-11-01 | 2020-06-23 | Integrated Device Technology, Inc. | Sensor Coil optimization |
| US10585149B2 (en) * | 2017-11-01 | 2020-03-10 | Integrated Device Technology, Inc. | Sensor coil optimization |
| JP7118627B2 (ja) * | 2017-12-01 | 2022-08-16 | 株式会社ミツトヨ | 電磁誘導式位置検出装置 |
| JP6970640B2 (ja) * | 2018-04-13 | 2021-11-24 | 株式会社ミツトヨ | 電磁誘導式エンコーダ |
| CN209605843U (zh) * | 2019-04-11 | 2019-11-08 | 郝佳 | 感应式位置测量传感器 |
| US11169008B2 (en) | 2020-03-23 | 2021-11-09 | Mitutoyo Corporation | Transmitter and receiver configuration for inductive position encoder |
| US11181395B2 (en) | 2020-03-23 | 2021-11-23 | Mitutoyo Corporation | Transmitter and receiver configuration for inductive position encoder |
| US11067414B1 (en) | 2020-03-23 | 2021-07-20 | Mitutoyo Corporation | Transmitter and receiver configuration for inductive position encoder |
| US11713983B2 (en) | 2021-06-30 | 2023-08-01 | Mitutoyo Corporation | Sensing winding configuration for inductive position encoder |
| US12072212B2 (en) | 2022-08-31 | 2024-08-27 | Mitutoyo Corporation | Inductive position encoder utilizing transmissive configuration |
| US12072213B2 (en) | 2022-08-31 | 2024-08-27 | Mitutoyo Corporation | Inductive position encoder utilizing slanted scale pattern |
| US12385764B2 (en) | 2022-12-30 | 2025-08-12 | Mitutoyo Corporation | Absolute position encoder utilizing single track configuration |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02278119A (ja) * | 1989-04-19 | 1990-11-14 | Omron Corp | 電磁誘導式変位センサ |
| JP2638460B2 (ja) * | 1993-12-27 | 1997-08-06 | 日本電気株式会社 | インダクトシンセンサ |
| US5886519A (en) * | 1997-01-29 | 1999-03-23 | Mitutoyo Corporation | Multi-scale induced current absolute position transducer |
| US6005387A (en) | 1997-04-16 | 1999-12-21 | Mitutoyo Corporation | Reduced offset high accuracy induced current position transducer |
| DE10111975B9 (de) * | 2000-03-13 | 2012-11-15 | Mitutoyo Corp. | Verfahren zur Fehlererfassung für eine Vorrichtung zur Positionserfassung mit elektromagnetischer Induktion |
| JP4172918B2 (ja) * | 2001-01-22 | 2008-10-29 | 株式会社ミツトヨ | 電磁誘導型絶対位置トランスデューサ |
| JP3842099B2 (ja) * | 2001-10-12 | 2006-11-08 | 株式会社ミツトヨ | 磁気式エンコーダ |
| JP3806358B2 (ja) * | 2002-02-27 | 2006-08-09 | 株式会社ミツトヨ | 誘導型位置トランスデューサ |
| JP3978049B2 (ja) * | 2002-02-28 | 2007-09-19 | 株式会社ミツトヨ | 誘導型位置トランスデューサ |
| GB2394293A (en) * | 2002-10-16 | 2004-04-21 | Gentech Invest Group Ag | Inductive sensing apparatus and method |
| JP2004198253A (ja) * | 2002-12-18 | 2004-07-15 | Mitsutoyo Corp | 磁気式エンコーダのスケール及び磁気式エンコーダ |
| JP4199583B2 (ja) * | 2003-04-10 | 2008-12-17 | 株式会社ミツトヨ | 誘導型トランスデューサ |
| KR101433784B1 (ko) * | 2007-01-19 | 2014-08-27 | 케이에스알 아이피 홀딩스 엘엘씨. | 기준 신호를 사용하는 유도 위치 센서 |
| JP5224838B2 (ja) | 2008-02-04 | 2013-07-03 | 株式会社ミツトヨ | 電磁誘導式エンコーダ |
| CN101806575B (zh) * | 2010-04-24 | 2012-04-25 | 上海交通大学 | 组合编码式涡流栅绝对位置传感器 |
-
2011
- 2011-07-22 JP JP2011161399A patent/JP5798397B2/ja not_active Expired - Fee Related
-
2012
- 2012-07-16 US US13/550,040 patent/US8928311B2/en active Active
- 2012-07-19 EP EP12177166.1A patent/EP2549239B1/en not_active Not-in-force
- 2012-07-20 CN CN201210254896.7A patent/CN102889899B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102889899A (zh) | 2013-01-23 |
| US8928311B2 (en) | 2015-01-06 |
| CN102889899B (zh) | 2016-11-23 |
| EP2549239A2 (en) | 2013-01-23 |
| JP2013024782A (ja) | 2013-02-04 |
| US20130021024A1 (en) | 2013-01-24 |
| EP2549239A3 (en) | 2017-07-05 |
| EP2549239B1 (en) | 2018-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5798397B2 (ja) | 電磁誘導式絶対位置測定用エンコーダ | |
| JP5809479B2 (ja) | 電磁誘導式絶対位置測定用エンコーダ | |
| JP5885382B2 (ja) | 電磁誘導式直線型エンコーダ | |
| JP5224838B2 (ja) | 電磁誘導式エンコーダ | |
| CN104880141B (zh) | 用于力指示卡尺的位移传感器 | |
| JP2017187300A (ja) | 電流センサ | |
| JP2018004314A (ja) | 電流センサ | |
| JP2019138815A (ja) | 電流センサ | |
| JPWO2016056135A1 (ja) | 電流検出装置、及び電流検出方法 | |
| JP5945975B2 (ja) | バスバモジュール | |
| JP5676223B2 (ja) | 電磁誘導式エンコーダ | |
| JP6134964B2 (ja) | 誘導型変位検出装置 | |
| KR101870348B1 (ko) | 홀효과 증대를 위한 홀플레이트 적층구조 및 이를 이용한 3차원 홀센서 | |
| JP4249529B2 (ja) | 電磁誘導型トランスジューサ | |
| JP6144597B2 (ja) | 電流センサ | |
| JP6390966B2 (ja) | 磁束密度センサ | |
| JP2005077150A (ja) | 誘導型位置検出装置 | |
| JP2002031546A (ja) | 磁気式エンコーダ | |
| JP6626199B2 (ja) | 電流センサ | |
| HK1114664A (en) | Inductive position sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140602 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150416 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150818 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150821 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5798397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |