JP5776783B2 - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP5776783B2 JP5776783B2 JP2013540507A JP2013540507A JP5776783B2 JP 5776783 B2 JP5776783 B2 JP 5776783B2 JP 2013540507 A JP2013540507 A JP 2013540507A JP 2013540507 A JP2013540507 A JP 2013540507A JP 5776783 B2 JP5776783 B2 JP 5776783B2
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- engine
- vehicle
- ecu
- internal combustion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 claims description 178
- 239000000446 fuel Substances 0.000 claims description 88
- 238000000034 method Methods 0.000 claims description 71
- 238000002485 combustion reaction Methods 0.000 claims description 48
- 230000007246 mechanism Effects 0.000 description 34
- 239000003921 oil Substances 0.000 description 24
- 230000002093 peripheral effect Effects 0.000 description 22
- 230000008929 regeneration Effects 0.000 description 19
- 238000011069 regeneration method Methods 0.000 description 19
- 238000001514 detection method Methods 0.000 description 17
- 239000010720 hydraulic oil Substances 0.000 description 15
- 230000001133 acceleration Effects 0.000 description 9
- 230000004044 response Effects 0.000 description 9
- 230000008859 change Effects 0.000 description 7
- 239000002828 fuel tank Substances 0.000 description 7
- 238000002347 injection Methods 0.000 description 7
- 239000007924 injection Substances 0.000 description 7
- 230000001172 regenerating effect Effects 0.000 description 7
- 230000004043 responsiveness Effects 0.000 description 6
- 230000000052 comparative effect Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 230000000994 depressogenic effect Effects 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000003502 gasoline Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 239000004215 Carbon black (E152) Substances 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 229930195733 hydrocarbon Natural products 0.000 description 1
- 150000002430 hydrocarbons Chemical class 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/383—One-way clutches or freewheel devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/387—Actuated clutches, i.e. clutches engaged or disengaged by electric, hydraulic or mechanical actuating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/006—Structural association of a motor or generator with the drive train of a motor vehicle
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/108—Structural association with clutches, brakes, gears, pulleys or mechanical starters with friction clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Arrangement Of Transmissions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
本発明は、車両の制御装置に関するものである。
近年、環境に配慮した自動車などの車両として、ハイブリッド車両が注目されている。ハイブリッド車両は、駆動力源として、ガソリンなどを燃料として駆動する内燃機関(以下、エンジンという)と、バッテリからの電力により駆動する電動機とを備えている。
図10に示すように、この種のハイブリッド車両では、例えばエンジン310と、駆動ユニット320と、変速機330とを直列に接続してなる駆動装置300を搭載したものが開発されている(例えば、特許文献1参照)。駆動ユニット320は、電動機321と、クラッチ322と、ワンウェイクラッチ323とを備えている。
電動機321は、変速機330の変速機入力軸331と一体回転するように設けられている。クラッチ322は、エンジン310のクランク軸311と変速機入力軸331との間に設けられるとともに、エンジン310および電動機321の間の伝達状態を解放状態と係合状態とに切り替えるようになっている。ワンウェイクラッチ323は、クランク軸311と変速機入力軸331との間に設けられるとともに、エンジン310から電動機321に正転方向の動力のみを伝達するようになっている。
この駆動装置300では、エンジン310を始動する時は、クラッチ322を係合状態にしておき、電動機321を駆動し、電動機321がクラッチ322を介してエンジン310をクランキングして始動させる。エンジン310の始動後は、クラッチ322を解放状態にする。これにより、エンジン310の出力は、ワンウェイクラッチ323のみを介して変速機330に伝達される。
しかしながら、従来の駆動装置300にあっては、エンジン310の始動後はエンジン310の出力がワンウェイクラッチ323のみにより変速機330に伝達される。このため、運転者がアクセルペダルを解放した時に、クランク軸311の回転数が変速機入力軸331の回転数よりも落ち込んでしまう。このため、再度アクセルペダルを踏み込んで再加速する際は、クランク軸311の回転数が変速機入力軸331と同じになってからエンジン310の動力が変速機330に伝達されるようになり、ドライバビリティが悪化するという問題があった。
これに対し、従来の駆動装置300においてドライバビリティを重視してクラッチ322を常に係合状態にすると、アクセルペダルの解放時にクランク軸311が変速機入力軸331に連れ回されてしまい、回生エネルギを十分に確保できないという問題があった。これらのことから、ドライバビリティと回生効率との両立が望まれていた。
本発明は、このような問題を解決するためになされたもので、ドライバビリティと回生効率とを両立できる車両の制御装置を提供することを目的とする。
本発明に係る車両の制御装置は、上記目的達成のため、内燃機関と、車輪に連結された電動機と、前記内燃機関と前記電動機とを切り離す解放状態と、前記内燃機関と前記電動機とを接続する係合状態と、の間で伝達状態を切り替えるクラッチと、前記内燃機関から前記電動機に正転方向の動力のみを伝達可能なワンウェイクラッチと、を備える車両の制御装置であって、前記内燃機関の動力を前記電動機に伝達する際に、前記クラッチを前記解放状態にしたまま前記ワンウェイクラッチを介して前記動力を伝達する第1の伝達方法と、前記クラッチを前記係合状態にして前記クラッチを介して前記動力を伝達する第2の伝達方法とを、前記車両の状態に応じて切り替えることを特徴とする。
この構成により、回生効率を重視してワンウェイクラッチを利用する第1の伝達方法と、ドライバビリティを重視してクラッチを利用する第2の伝達方法とを、制御手段が車両の状態に応じて切り替える。このため、車両の状態に応じて、ドライバビリティと回生効率とのいずれを重視した走行にするかを切り替えることができる。よって、ドライバビリティと回生効率の両立を図ることができる。
ここで、車両の状態とは、例えば、内燃機関の回転数や、車速や、車両の動力性能を重視した走行時であるか否かなど、車両に関する各種の情報とすることができる。また、クラッチの係合状態とは、完全係合の他、半係合など、クラッチにより僅かでも動力を伝達する状態を含む。
また、本発明による車両の制御装置は、前記車両の状態とは前記内燃機関の回転数であり、前記内燃機関の回転数が予め定められた所定の値より大きくなったら、前記第1の伝達方法から前記第2の伝達方法に切り替えて、前記内燃機関の動力を前記電動機を介して前記車輪に伝達することを特徴とする。
ここで、内燃機関の回転数が大きいと、走行中には電動機の回転数も大きくなる。このため、クラッチを解放して走行すると、アクセルペダルが解放されて内燃機関の回転数が低下して、電動機の回転数と内燃機関の回転数との差が大きくなってしまう。よって、再びアクセルペダルを踏み込んだ際にドライバビリティが悪くなってしまう。
本発明の構成により、内燃機関の回転数が大きくなる傾向のある状況でクラッチが係合状態にされて内燃機関による走行に切り替えられるので、内燃機関の回転数と電動機の回転数との差を無くすことができ、ドライバビリティを向上できる。また、内燃機関の回転数が大きくなる傾向のない状況では、クラッチは解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
また、本発明による車両の制御装置は、前記車両の状態とは車速であり、前記車速が予め定められた所定の値より大きくなったら、前記第1の伝達方法から前記第2の伝達方法に切り替えて、前記内燃機関の動力を前記電動機を介して前記車輪に伝達することを特徴とする。
ここで、変速機の変速段が同一である場合は、内燃機関の回転数が大きいほど車速が大きくなる。したがって、本発明の構成により、車速、すなわち内燃機関の回転数が大きくなる傾向のある状況でクラッチが係合状態にされて内燃機関による走行に切り替えられるので、ドライバビリティが向上する。また、車速が予め定められた所定の値より大きくない場合は、クラッチは解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
また、本発明による車両の制御装置は、前記車両の状態とは運転者により操作される動力性能を重視した走行時であるか否かであり、前記運転者により操作される動力性能を重視した走行時は、前記第1の伝達方法から前記第2の伝達方法に切り替えて、前記内燃機関の動力を前記電動機を介して前記車輪に伝達することを特徴とする。
ここで、動力性能を重視した走行時か否かとは、例えば、アクセルペダルの踏み込みによる加速の応答性を意味する。また、動力性能を重視した走行時とは、例えば、アクセルペダルの踏み込みによる加速の応答性が高度である走行時を意味する。
この構成により、動力性能を重視した走行時に、クラッチが係合状態にされて内燃機関による走行に切り替えられるので、ドライバビリティが向上する。また、動力性能を重視しない走行時では、クラッチは解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
また、本発明による車両の制御装置は、前記動力性能を重視した走行時とは、前記運転者により操作される走行ポジションがSポジション、Mポジション、2ポジション、Lポジション、Bポジションのいずれかである場合または、前記運転者により操作される走行モードがスポーツモード、マニュアルモードのいずれかである場合または、前記運転者により操作されるアクセルペダルの踏み込み速度が予め定められた所定の値よりも速い場合であることを特徴とする。
ここで、走行ポジションは、自動変速機を備えている場合に適用される。Sポジションはスポーツポジションを意味し、常に高めのエンジン回転を維持し、例えば、コーナリング中の不要な変速を抑制するコーナリング制御などが行われるようになっている。Mポジションは、運転者が変速段を選択するマニュアルポジションを意味する。2ポジションは、変速の上限が2速になるセカンドポジションを意味する。Lポジションは、1速に固定されるローポジションを意味する。Bポジションは、エンジンブレーキが使用されるブレーキポジションを意味する。
この構成により、Sポジション、Mポジション、2ポジション、Lポジション、Bポジションのいずれかである場合に、アクセルペダルの踏み込みによる加速の応答性を向上することができる。アクセルペダルの踏み込みによる加速の応答性は、これらSポジション、Mポジション、2ポジション、Lポジション、Bポジションのいずれかである場合に要求されることが多いので、ドライバビリティの向上を図ることができる。また、自動変速機がDポジションである場合には、クラッチは解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
また、運転者により操作される走行モードは、自動変速機を備えている場合に適用されるとともに、自動変速機のポジションとは別に設定される変速プログラムとしている。スポーツモードは、常に高めのエンジン回転を維持し、例えば、コーナリング中の不要な変速を抑制するコーナリング制御などが行われるものとしている。スポーツモードでは、自動変速機のシフトポジションがDポジションのままであっても、スポーティーな走行が可能となるものとしている。マニュアルモードでは、運転者が変速段を選択可能になる。
この構成により、走行モードがスポーツモード、マニュアルモードのいずれかである場合に、アクセルペダルの踏み込みによる加速の応答性を向上することができる。アクセルペダルの踏み込みによる加速の応答性は、特にスポーツモード、マニュアルモードのいずれかである場合に要求されることが多いので、ドライバビリティの向上を図ることができる。また、走行モードがスポーツモード、マニュアルモードのいずれかでない場合は、クラッチが解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
さらに、運転者により操作されるアクセルペダルの踏み込み速度が予め定められた所定の値よりも速い場合、例えばアクセルペダルが急に踏み込まれた場合に、アクセルペダルの踏み込みによる加速の応答性を向上することができる。特にアクセルペダルの踏み込み速度が予め定められた所定の値よりも速い場合は、アクセルペダルの踏み込みによる加速の応答性が要求されていることが多いので、ドライバビリティの向上を図ることができる。また、アクセルペダルの踏み込み速度が予め定められた所定の値以下の場合は、クラッチが解放状態にされるようにできるので、回生効率が向上する。よって、ドライバビリティと回生効率の両立を図ることができる。
また、本発明による車両の駆動装置は、前記車両が前記第1の伝達方法で走行している際に前記内燃機関の停止指令が発せられたら、前記内燃機関のフューエルカットを行うとともに、前記車両が前記第2の伝達方法で走行している際に前記内燃機関の停止指令が発せられたら、前記クラッチを前記解放状態に切り替え、前記内燃機関のフューエルカットを行うことを特徴とする。
この構成により、内燃機関の停止指令が発せられたときには、クラッチを解放状態にしてフューエルカットを行うので、エンジントルクが正から負に変わる際の振動の発生を抑えることができる。しかも、ワンウェイクラッチを備えずに係合状態のクラッチのみで伝達を行う場合に比べて、クラッチを解放するまでの時間を短縮できるので、フューエルカットを早期に行うことができる。フューエルカットの早期化により、燃費の向上を図ることができる。
本発明によれば、ドライバビリティと回生効率とを両立できる車両の制御装置を提供することができる。
以下、本発明の好ましい実施形態について、図面を参照しつつ説明する。本実施の形態は、本発明をハイブリッド車両用の駆動装置に適用したものである。
まず、構成について説明する。
図1に示すように、駆動装置1は、エンジン10と、燃料供給装置100と、駆動ユニット20と、自動変速機30と、制御ユニット40とを備えている。本実施の形態では、駆動装置1のエンジン10の方向をエンジン側E、駆動装置1の自動変速機30の方向を自動変速機側Tとしている。
エンジン10は、ガソリンあるいは軽油などの炭化水素系の燃料と空気との混合気を、図示しない燃焼室内で燃焼させることによって動力を出力する公知の動力装置により構成されている。エンジン10は、エンジン本体13と、吸気装置14と、図示しない排気装置とを備えている。エンジン10は、本発明における内燃機関を構成している。
エンジン本体13は、複数の気筒131と、各気筒131ごとに設けられた吸気ポート132とを備えている。吸気ポート132は気筒131の内外を連通している。
吸気装置14は、吸気管16と、スロットルバルブ部17と、吸気マニホールド18とを備えている。吸気マニホールド18は、吸気管16と各吸気ポート132とを接続している。
スロットルバルブ部17は、スロットルバルブ171と、スロットルモータ172とを備えている。スロットルバルブ171は、吸気管16の下流部に設けられるとともに、各気筒131に供給される吸入空気の吸入流量を調節するようになっている。スロットルモータ172は、電子制御式で、制御ユニット40により制御されることによりスロットルバルブ171を開閉可能にしている。スロットルバルブ171には、スロットル開度センサ173が設けられている。スロットル開度センサ173は、スロットルバルブ171の開度を検出して制御ユニット40に入力するようになっている。
エンジン10は、各気筒131の燃焼室内で混合気の吸気と燃焼と排気とを繰り返すことにより各気筒131の図示しないピストンを往復動させ、ピストンと動力伝達可能に連結されたクランクシャフト11を回転させるようになっている。エンジン10は、クランクシャフト11から駆動ユニット20にトルクを伝達するようになっている。クランクシャフト11には、エンジン回転数センサ19が設けられている。エンジン回転数センサ19は、クランクシャフト11の回転数を検出して制御ユニット40に入力するようになっている。エンジン回転数センサ19は、内燃機関回転数検出手段を構成している。
燃料供給装置100は、燃料タンク部110と、配管部120とを備えている。燃料供給装置100は、燃料供給手段として機能するようになっている。
燃料タンク部110は、燃料タンク111と、燃料ポンプ112と、吐出チェック弁113と、燃料フィルタ114と、燃料ポンプコントロールコンピュータ115と、プレッシャレギュレータ116と、電磁弁117とを備えている。燃料タンク111には燃料が貯留されている。
燃料ポンプ112は、燃料タンク111の燃料を汲み上げて吐出し、吐出チェック弁113および燃料フィルタ114を介して配管部11に給送する。この燃料ポンプ112は、低圧の吐出圧可変のポンプで、図示しないポンプロータおよびモータを備えている。モータ駆動の回転数によりポンプロータの回転速度を変化させることで、燃料ポンプ112の吐出流量およびフィード圧力が変化するようになっている。
燃料ポンプコントロールコンピュータ115は、制御ユニット40および燃料ポンプ112の間に介在されている。燃料ポンプコントロールコンピュータ115は、制御ユニット40からのポンプ制御信号に基づいて、燃料ポンプ112をオンオフしたり、回転速度を制御するようになっている。
プレッシャレギュレータ116は、燃料フィルタ114の下流側の配管部120に接続されている。電磁弁117は、三方弁からなるとともに、燃料ポンプ112の吐出側管と、可変のプレッシャレギュレータ116の余剰燃料排出管と、燃料タンク111内の燃料に開口する管とに接続されている。
ここでは、燃料ポンプ112をフィード圧力が可変のポンプとしているが、これに限定されず、フィード圧力が一定のポンプとしてもよい。この場合、可変のプレッシャレギュレータ116の背圧などを電磁弁によって少なくとも高圧および低圧の2段に切替え可能なものにして、フィード圧力を制御するようにしてもよい。
配管部11は、燃料管121と、デリバリパイプ122と、燃料噴射弁123とを順に接続して備えている。
燃料管121は、燃料タンク部110の燃料フィルタ114に接続されている。燃料管121は、デリバリパイプ122に接続されている。デリバリパイプ122は、燃料噴射弁123に接続されている。燃料噴射弁123は、吸気ポート132に燃料を噴射可能に設けられている。燃料噴射弁123は、電磁弁からなるとともに、制御ユニット40から発せられる制御信号により吸気ポート132に燃料を噴射するようになっている。
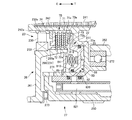
駆動ユニット20は、入力部21と、クラッチ22と、ワンウェイクラッチ23と、モータジェネレータ24と、ドラム25と、ハブ部26と、出力部27と、ケース部28とを備えている。モータジェネレータ24は、本発明の電動機を構成している。駆動ユニット20は、エンジン10と自動変速機30との間に介在されるとともに、エンジン10のクランクシャフト11からの動力を自動変速機30の後述する変速機入力軸31に伝達するようになっている。
入力部21は、フライホイール210と、ダンパー211と、クラッチ入力軸212と、スリーブ213と、ベアリング214とを備えている。フライホイール210は、クランクシャフト11に一体回転するように連結されている。
ダンパー211は、フライホイール210に一体回転するように周縁部で連結されている。ダンパー211は、クラッチ入力軸212に一体回転するように中心部で連結されている。ダンパー211は、フライホイール210とクラッチ入力軸212との間で、回転方向の力を吸収するようになっている。
クラッチ入力軸212は、クランクシャフト11と同軸に設けられている。クラッチ入力軸212は、クラッチ22およびワンウェイクラッチ23に一体回転可能に連結されるとともに、クラッチ22およびワンウェイクラッチ23に動力を伝達するようになっている。
スリーブ213は、クラッチ入力軸212の外周側部に一体回転するように取り付けられている。ベアリング214は、玉軸受けからなり、スリーブ213の外周側部に固着されている。
出力部27は、クラッチ出力軸270と、スリーブ271と、ベアリング272と、スラスト軸受273とを備えている。
クラッチ出力軸270は、クラッチ入力軸212と同軸に設けられている。クラッチ出力軸270は、クラッチ22およびワンウェイクラッチ23に一体回転可能に連結されるとともに、クラッチ22およびワンウェイクラッチ23の動力を外部に伝達するようになっている。クラッチ出力軸270は、自動変速機30の変速機入力軸31に一体回転可能に連結されるとともに、駆動ユニット20の出力を自動変速機30に伝達するようになっている。
スリーブ271は、クラッチ出力軸270の外周部に一体回転するように取り付けられている。ベアリング272は、玉軸受けからなり、スリーブ271の自動変速機側Tにおいてクラッチ出力軸270と一体回転可能に設けられている。スラスト軸受273は、クラッチ入力軸212とクラッチ出力軸270との互いに対向する端面同士の間に設けられるとともに、クラッチ入力軸212とクラッチ出力軸270とを相対回転可能に軸方向に支持している。
モータジェネレータ24は、ステータ240と、ロータ241と、ロータケース242とを備えている。モータジェネレータ24は、クランクシャフト11と変速機入力軸31との動力伝達経路に介在されている。
ステータ240は、ステータコア240aと、ステータコア240aに巻回される三相コイル240bとを備えている。ステータコア240aは、例えば、電磁鋼板の薄板を積層して形成されるとともに、ケース部28に固定されている。ステータ240は、三相コイル240bへの通電により回転磁界を形成するようになっている。
ロータ241は、ステータ240の内部に配置されるとともに、複数個の永久磁石が埋め込まれて形成されている。ロータケース242は、ロータ241を収容している。ロータケース242は略円筒形状で、出力部27のスリーブ271の外周側に位置して設けられている。ロータケース242は、内周側部に軸方向に沿ったスプライン242aを備えている。
ロータケース242には、モータ回転数センサ243が設けられている。モータ回転数センサ243は、ロータ241の回転数を検出することにより、モータジェネレータ24の回転数を検出して制御ユニット40に入力するようになっている。
モータジェネレータ24は、ロータ241に埋め込まれた永久磁石による磁界と三相コイル240bによって形成される磁界との相互作用により、ロータ241を回転駆動する電動機として動作するようになっている。また、モータジェネレータ24は、ロータ241に埋め込まれた永久磁石による磁界とロータ241の回転との相互作用により、三相コイル240bの両端に起電力を生じさせる発電機としても動作するようになっている。
モータジェネレータ24はインバータ46に接続されている。インバータ46はバッテリ47に接続されている。このため、モータジェネレータ24は、インバータ46を介してバッテリ47との間で電力のやり取りを行うようになっている。バッテリ47は、ハイブリッド車両の運転状況に応じて、モータジェネレータ24から生じた電力を充電したり、あるいは放電するようになっている。
インバータ46からモータジェネレータ24への電力ラインには、MG電流センサ461が取り付けられている。MG電流センサ461は、相電流を検出して制御ユニット40に入力するようになっている。バッテリ47の出力端子間にはバッテリ電圧センサ471が取り付けられている。バッテリ電圧センサ471は、バッテリ47の出力電圧を検出して制御ユニット40に入力するようになっている。バッテリ47の出力端子には、バッテリ電流センサ472が取り付けられている。バッテリ電流センサ472は、バッテリ47の充放電電流を検出して制御ユニット40に入力するになっている。バッテリ47には、バッテリ温度センサ473が取り付けられている。バッテリ温度センサ473は、バッテリ温度を検出して制御ユニット40に入力するようになっている。
ドラム25は、ロータケース242およびスリーブ271を連結して、ロータケース242およびスリーブ271を一体化している。ドラム25の半径方向の中央部には、外周側をエンジン側Eにずらした段部25aが形成されている。ロータ241の回転は、ドラム25およびスリーブ271を経て、クラッチ出力軸270に伝達される。
ハブ部26は、ハブ本体260と、支持板261とを備えている。
ハブ本体260は、円筒形状で、ハブ本体260の外周側部に軸方向に沿ったスプライン260aを備えている。ハブ本体260は、ロータケース242およびスリーブ271の間に入り込んでいる。支持板261は、ハブ本体260のエンジン側Eの端部とクラッチ入力軸212の自動変速機側Tの端部とを連結して、ハブ本体260とクラッチ入力軸212とを一体化している。
ハブ本体260は、支持板261と、クラッチ入力軸212と、ダンパー211と、フライホイール210とを介して、クランクシャフト11に一体回転するように連結されている。逆に、クランクシャフト11の回転は、フライホイール210→ダンパー211→クラッチ入力軸212→支持板261という経路を経て、ハブ本体260に伝達される。
クラッチ22は、多板部70と、ピストン部80とを備えている。クラッチ22は、入力部21と出力部27との間に設けられている。クラッチ22は、クランクシャフト11と変速機入力軸31との間に設けられるとともに、クランクシャフト11と変速機入力軸31との間を接続したり切断したりするようになっている。すなわち、クラッチ22は、エンジン10とモータジェネレータ24とを切り離す解放状態と、エンジン10とモータジェネレータ24とを接続する係合状態との間で伝達状態が切り替わるようになっている。
クラッチ22は、ノーマリーオープン型となっている。クラッチ22は、通常は解放されていてエンジン10とモータジェネレータ24との接続を切断しているとともに、オイルポンプ34から高圧の作動油が供給されることにより作動してエンジン10とモータジェネレータ24とを接続するようになっている。クラッチ22は、モータジェネレータ24の内周部に設けられている。
多板部70は、ロータケース242とハブ本体260との間に設けられている。多板部70は、複数のセパレータプレート71および複数の摩擦プレート72と、クッションプレート73と、スナップリング74とを備えている。
セパレータプレート71は、環状で、外周部に形成されたスプライン外歯71aと、内周部に形成された貫通孔71bとを備えている。スプライン外歯71aは、ロータケース242のスプライン242aに噛み合わされて、軸方向に摺動可能に設けられている。このため、セパレータプレート71は、ロータケース242と一体回転するようになっている。貫通孔71bには、ハブ本体260が接触することなく挿通されている。
摩擦プレート72は、環状で、内周部に形成されたスプライン内歯72aを備えている。スプライン内歯72aは、ハブ本体260のスプライン260aに噛み合わされて、軸方向に摺動可能に設けられている。このため、摩擦プレート72は、ハブ本体260と一体回転するようになっている。
セパレータプレート71と摩擦プレート72とは、交互に隣接して設けられている。摩擦プレート72とセパレータプレート71とが軸方向に押圧されて互いに回転方向に摩擦を生ずることにより、ロータケース242とハブ部26とが締結されるようになっている。摩擦プレート72とセパレータプレート71との軸方向の押圧が解放されて互いに摩擦を生じなくなることにより、ロータケース242とハブ部26との締結が解放されるようになっている。
クッションプレート73は、環状で、外周部に形成されたスプライン外歯73aと、内周部に形成された貫通孔73bとを備えている。スプライン外歯73aは、ロータケース242のスプライン242aに噛み合わされて、軸方向に摺動可能に設けられている。このため、クッションプレート73は、ロータケース242と一体回転するようになっている。クッションプレート73は、全てのセパレータプレート71および摩擦プレート72よりも自動変速機側Tに位置するように設けられている。
スナップリング74は、環状で、全てのセパレータプレート71および摩擦プレート72よりもエンジン側Eで、ロータケース242のスプライン242aに固定されている。このため、スナップリング74は、セパレータプレート71と、摩擦プレート72と、クッションプレート73とがロータケース242のスプライン242aから脱落しないようにストッパ機能を有するようになっている。
ピストン部80は、ドラム25と、多板部70との間に設けられている。ピストン部80は、ピストン81と、油圧供給部82と、戻りばね83と、支持プレート84と、ストッパリング85とを備えている。
ピストン81は、スリーブ271と段部25aとの間で軸方向に摺動可能に設けられている。ピストン81は、内側Oリング810と、外側Oリング811と、押圧部812とを備えている。
内側Oリング810は、ピストン81の内周側部に設けられるとともに、スリーブ271の外周側部に接触している。外側Oリング811は、ピストン81の外周側部に設けられるとともに、ドラム25の段部25aの内周側部に接触している。押圧部812は、クッションプレート73に対向するとともに、ピストン81のエンジン側Eへの摺動に伴ってクッションプレート73を押圧するようになっている。
油圧供給部82は、油圧供給孔820と、油圧供給路821とを備えている。油圧供給孔820は、スリーブ271に形成されるとともに、ピストン81およびドラム25で囲まれる空間86とスリーブ271の内周側の空間とを連通している。油圧供給路821は、油圧供給孔820と、自動変速機30の後述する機械式のオイルポンプ34とを連通している。
高圧の作動油が、油圧供給路821および油圧供給孔820を介して、ピストン81およびドラム25で囲まれる空間86に供給されると、ピストン81はエンジン側Eに摺動するようになっている。ピストン81がエンジン側Eに移動することにより、押圧部812がクッションプレート73を介して摩擦プレート72とセパレータプレート71とをエンジン側Eに押圧して締結させる。摩擦プレート72とセパレータプレート71との締結により、ロータ241およびハブ部26が一体回転するようになっている。
戻りばね83は、周方向に沿って配置された多数の圧縮コイルばねからなるとともに、ピストン81をエンジン側Eから自動変速機側Tに押圧するように設けられている。支持プレート84は、環状で、戻りばね83のエンジン側Eを支持している。支持プレート84は、ストッパリング85によりエンジン側Eへの移動を規制されている。ストッパリング85は、スリーブ271に固定されている。
油圧供給路821の油圧が低下して戻りばね83の付勢力より小さくなることにより、戻りばね83の作用によりピストン81が自動変速機側Tに摺動するようになっている。ピストン81が自動変速機側Tに移動することにより、摩擦プレート72とセパレータプレート71との締結が解放され、ロータ241およびハブ部26が別々に回転するようになっている。
ワンウェイクラッチ23は、ロータケース242とハブ本体260との間に設けられている。ワンウェイクラッチ23は、クランクシャフト11と変速機入力軸31との間に設けられるとともに、クランクシャフト11から変速機入力軸31を介してモータジェネレータ24に正転方向の動力のみを伝達可能に接続されている。ここで、正転方向とは、クランクシャフト11の回転方向を意味する。また、ワンウェイクラッチ23は、モータジェネレータ24の内周部に設けられている。ワンウェイクラッチ23は、モータジェネレータ24の内周部で多板部70に対して軸方向に隣接して配置されている。
ワンウェイクラッチ23は、外輪部230と、内輪部231と、回転規制部232とを備えている。
外輪部230は、外周側部に軸方向に沿ったスプライン230aを備えている。外輪部230のスプライン230aは、ロータケース242のスプライン242aに噛み合わされている。よって、ワンウェイクラッチ23の外輪部230は、ロータケース242と一体回転するようになっている。また、外輪部230は、ロータケース242を介して、クラッチ出力軸270に一体回転するように接続されている。
内輪部231は、ハブ本体260と兼用されている。よって、ワンウェイクラッチ23の内輪部231は、ハブ部26と一体回転するようになっている。また、内輪部231は、ハブ部26および入力部21を介して、クランクシャフト11に一体回転するように接続されている。
回転規制部232は、外輪部230および内輪部231の間に設けられている。回転規制部232は、内輪部231を外輪部230に対して正転方向のみに回転可能にするようになっている。
ワンウェイクラッチ23は、クランクシャフト11の回転数がクラッチ出力軸270の回転数よりも大きい場合に、クランクシャフト11の回転をクラッチ出力軸270に伝達するようになっている。また、ワンウェイクラッチ23は、クランクシャフト11の回転数がクラッチ出力軸270の回転数よりも小さい場合に、クランクシャフト11の回転をクラッチ出力軸270に伝達せず、クラッチ出力軸270は自由に回転するようになっている。
ケース部28は、ケース本体280と、エンジン側リブ281と、自動変速機側リブ282とを備えている。ケース本体280は、入力部21と、クラッチ22と、ワンウェイクラッチ23と、モータジェネレータ24と、ドラム25と、ハブ部26と、出力部27とを収容している。
エンジン側リブ281は、クラッチ入力軸212を中心とする環状で、モータジェネレータ24のエンジン側Eに設けられるとともに、ケース本体280に固定されている。エンジン側リブ281の内周部には、入力部21のベアリング214を介してスリーブ213が回転可能に取り付けられている。このため、スリーブ213と、クラッチ入力軸212と、ハブ部26とは、エンジン側リブ281に回転可能に支持されている。
エンジン側リブ281と、スリーブ213との間には、入力軸回転センサ29が取り付けられている。入力軸回転センサ29は、クラッチ入力軸212およびハブ部26の回転速度を検出して制御ユニット40に入力するようになっている。入力軸回転センサ29は、レゾルバであり、センサステータ29aとセンサロータ29bとを備えている。センサステータ29aは、エンジン側リブ281に取り付けられている。センサロータ29bは、スリーブ213に取り付けられている。なお、入力軸回転センサ29としては、レゾルバ以外の各種センサを用いてもよい。
自動変速機側リブ282は、クラッチ出力軸270を中心とする環状で、モータジェネレータ24の自動変速機側Tに設けられるとともに、ケース本体280に固定されている。自動変速機側リブ282の内周部には、ベアリング272を介してスリーブ271が回転可能に取り付けられている。このため、スリーブ271およびクラッチ出力軸270は、自動変速機側リブ282に回転可能に支持されている。
図1に示すように、自動変速機30は、変速機入力軸31と、トルクコンバータ32と、変速機構入力軸33と、オイルポンプ34と、変速機構35と、油圧制御装置36と、出力軸37と、ケース38とを備えている。
トルクコンバータ32は、循環する作動油の作用を利用する流体式で、駆動ユニット20のクラッチ出力軸270から伝達される駆動力を、変速機構入力軸33を介して変速機構35に伝達するようになっている。トルクコンバータ32は、タービンランナ90と、ポンプインペラ91と、フロントカバー92と、ステータ93と、ワンウェイクラッチ94と、中空軸95とを備えている。
タービンランナ90およびポンプインペラ91は、タービンランナ90がエンジン側Eに位置するように互いに対向して配置されている。タービンランナ90は、変速機構入力軸33に一体回転するように連結されている。ポンプインペラ91は、フロントカバー92を介して変速機入力軸31に一体回転するように連結されている。
タービンランナ90およびポンプインペラ91の間の内周側には、ステータ93が設けられている。ステータ93には、ワンウェイクラッチ94を介して中空軸95が接続されている。中空軸95は、ケース38に固定されるとともに、内部に変速機構入力軸33を回転可能に収容している。ケース38の内部には、作動油が供給されている。
オイルポンプ34は、ロータ340と、ハブ341と、ボデー342とを備えている。ハブ341は、円筒形状で、ロータ340とポンプインペラ91とを一体回転するように連結している。ボデー342は、ケース38に固定されている。このため、駆動ユニット20からの動力が、フロントカバー92からポンプインペラ91を介してロータ340に伝達され、オイルポンプ34が駆動されるようになっている。
オイルポンプ34から吐出される作動油は、変速機構35に供給されるとともに、駆動ユニット20のクラッチ22にも供給されるようになっている(図1中、一点鎖線で示す)。オイルポンプ34は、油圧の供給により、変速機構35の変速段もしくは変速比の切り替えや、クラッチ22の締結を行うようになっている。
オイルポンプ34とクラッチ22との間には、油圧調整バルブ39が設けられている。油圧調整バルブ39は、制御ユニット40からの信号に伴い、オイルポンプ34からクラッチ22への作動油の供給量を調整するようになっている。
変速機構35は、図示しない複数のクラッチやブレーキを有している。変速機構35では、ハイブリッド車両の走行状況に応じて複数のクラッチやブレーキの係合および解放が、油圧制御装置36から供給される油圧によって切り替えられることで、所望の変速段が形成される。変速機構35の変速段としては、例えば、N(ニュートラル)ポジション、D(ドライブ)ポジション、R(後進)ポジション、M(マニュアル)ポジション(シーケンシャルポジション)、2(セカンド)ポジション、L(ロー)ポジション、B(ブレーキ)ポジション、S(スポーツ)ポジションなどがある。
変速機構35には、運転者が変速段を切り替えるためのシフトレバー51が接続されている。シフトレバー51には、シフトポジションセンサ52が設けられている。シフトポジションセンサ52は、シフトレバー51のポジション位置をシフトポジション信号として検出して制御ユニット40に入力するようになっている。シフトポジションセンサ52は、ポジション検出手段を構成している。
また、変速機構35では、複数の走行モードに切り替え可能になっている。走行モードは、変速機構35のポジションとは別に設定される変速プログラムであって、制御ユニット40により設定されるようになっている。
走行モードとしては、通常モードの他に、例えば、スポーツモードやマニュアルモード、エコモードがある。スポーツモードでは、常に高めのエンジン回転を維持し、例えば、コーナリング中の不要な変速を抑制するコーナリング制御などが行われるものとしている。これにより、スポーツモードやマニュアルモードでは、アクセルペダル53の応答性といった動力性能が重視されたモードとなる。エコモードでは、燃費の向上が優先されるようになり、動力性能は重視されなくなる。
シフトレバー51には、運転者が走行モードを切り替えるための図示しない走行モード切替スイッチが設けられている。シフトポジションセンサ52は、走行モード切替スイッチの選択した走行モードを走行モード信号として検出して制御ユニット40に入力するようになっている。この場合、シフトポジションセンサ52は、走行モード検出手段を構成している。
変速機構入力軸33から伝達された駆動力は、変速機構35を経て出力軸37に伝達され、出力軸37から図示しないディファレンシャルを経て車輪に伝達されるようになっている。すなわち、モータジェネレータ24は車輪に連結されている。なお、本実施の形態の変速機構35は、有段式の変速機構で構成されているが、有段式に限られず、例えば無段式の変速機構で構成されるようにしてもよい。
図4に示すように、制御ユニット40は、ハイブリッド用電子制御ユニット(Electronic Control Unit;以下、ECUという)41と、エンジン用電子制御ユニット(以下、エンジンECUという)42と、モータ用電子制御ユニット(以下、モータECUという)43と、バッテリ用電子制御ユニット(以下、バッテリECUという)44と、トランスミッション用電子制御ユニット(以下、トランスミッションECUという)45とを備えている。制御ユニット40は制御手段を構成している。
ECU41は、CPU(Central processing unit)410と、処理プログラムなどを記憶するROM(Read only memory)411と、一時的にデータを記憶するRAM(Random access memory)412と、バックアップメモリ413と、入力ポート414と、出力ポート415と、通信ポート416とを備えている。ECU41は、ハイブリッド車両の制御を統括するようになっている。
ECU41の入力ポート414には、エンジン回転数センサ19と、入力軸回転数センサ29と、モータ回転数センサ243と、車速センサ50と、アクセルセンサ54と、シフトポジションセンサ52と、MG電流センサ461と、バッテリ電圧センサ471およびバッテリ電流センサ472と、バッテリ温度センサ473と、スロットル開度センサ173とが接続されている。エンジン回転数センサ19と、車速センサ50と、アクセルセンサ54と、シフトポジションセンサ52とは、車両状態検出手段を構成している。これらエンジン回転数センサ19と、車速センサ50と、アクセルセンサ54と、シフトポジションセンサ52とにより検出されるデータは、車両の状態を示している。
車速センサ50は、車速信号を検出して制御ユニット40に入力するようになっている。アクセルセンサ54は、アクセルペダル53が踏み込まれた踏み込み量を検出して、検出した踏み込み量に応じた検出信号をECU41に入力するようになっている。また、ECU41は、アクセルセンサ54から出力された検出信号が表すアクセルペダル53の踏み込み量から、アクセル開度Accを算出するようになっている。
ECU41は、エンジンECU42と、モータECU43と、バッテリECU44と、トランスミッションECU45とに通信ポート416を介して接続されている。ECU41は、エンジンECU42と、モータECU43と、バッテリECU44と、トランスミッションECU45と各種制御信号やデータのやり取りを行うようになっている。
エンジンECU42は、エンジン10およびECU41に接続されている。エンジンECU42は、エンジン10の運転状態を検出する各種センサから信号を入力するとともに、入力した信号に応じて燃料噴射制御や点火制御、吸入空気量調節制御などの運転制御を行うようになっている。エンジンECU42は、燃料噴射弁123を制御することにより燃料制御を行い、燃料ポンプコントロールコンピュータ115を制御することにより燃圧調整やフューエルカットの制御を行い、スロットルモータ172を制御することにより吸入空気量を制御することができる。
エンジンECU42は、ECU41と通信するようになっている。エンジンECU42は、ECU41から入力される制御信号によりエンジン10を運転制御するとともに、必要に応じてエンジン10の運転状態に関するデータをECU41に出力するようになっている。
モータECU43は、インバータ46およびECU41に接続されている。モータECU43は、モータジェネレータ24を駆動制御するようになっている。モータECU43は、モータジェネレータ24を駆動制御するために必要な信号を入力するようになっている。モータジェネレータ24を駆動制御するために必要な信号としては、例えば、モータジェネレータ24のモータ回転数センサ243から入力される信号や、MG電流センサ461により検出されるモータジェネレータ24に印加される相電流の信号などがある。モータECU43は、インバータ46へのスイッチング制御信号を出力するようになっている。
モータECU43は、ECU41と通信するようになっている。モータECU43は、ECU41から入力される制御信号に応じてインバータ46を駆動制御することにより、モータジェネレータ24を駆動制御するようになっている。モータECU43は、必要に応じてモータジェネレータ24の運転状態に関するデータをECU41に出力するようになっている。
バッテリECU44は、バッテリ47およびECU41に接続されている。バッテリECU44は、バッテリ47を管理している。バッテリECU44は、バッテリ47を管理するのに必要な信号を入力するようになっている。バッテリ47を管理するのに必要な信号としては、例えば、バッテリ電圧センサ471からの端子間電圧の信号や、バッテリ電流センサ472からの充放電電流の信号や、バッテリ温度センサ473からの電池温度の信号などがある。
バッテリECU44は、ECU41と通信するようになっている。バッテリECU44は、必要に応じてバッテリ47の状態に関するデータをECU41に出力するようになっている。バッテリECU44は、バッテリ47を管理するために、バッテリ電流センサ472により検出された充放電電流の積算値に基づいて残容量(SOC:State of charge)を演算するようになっている。
トランスミッションECU45は、自動変速機30およびECU41に接続されている。トランスミッションECU45は、トルクコンバータ32の図示しないロックアップクラッチを駆動制御したり、変速機構35の変速段を変更したりするようになっている。
トランスミッションECU45は、ECU41と通信するようになっている。トランスミッションECU45は、ECU41からの信号に基づいて変速機構35の変速段を変更する変速制御を実行するようになっている。トランスミッションECU45は、必要に応じて変速機構35やトルクコンバータ32の運転状態に関するデータをECU41に出力するようになっている。
上述したエンジン10と、モータジェネレータ24と、クラッチ22と、ワンウェイクラッチ23と、制御ユニット40とは、本発明の車両の制御装置を構成している。また、本発明の車両の制御装置は、エンジン10の動力をモータジェネレータ24に伝達する際に、第1の伝達方法と、第2の伝達方法とを、車両の状態に応じて切り替えるようになっている。第1の伝達方法は、クラッチ22を解放状態にしたままワンウェイクラッチ23を介して動力を伝達するもので、回生効率を重視したものとなる。第2の伝達方法は、クラッチ22を係合状態にしてクラッチ22を介して動力を伝達するもので、ドライバビリティを重視したものとなる。
また、制御ユニット40は、エンジン10の動力をモータジェネレータ24に伝達する際に、第1の伝達方法と第2の伝達方法とを、車両状態検出手段により検出された車両の状態に応じて切り替えるようになっている。ここでの車両状態検出手段は、エンジン回転数センサ19と、車速センサ50と、アクセルセンサ54と、シフトポジションセンサ52との少なくともいずれかとしている。
車両の状態がエンジン10の回転数である場合は、車両状態検出手段は、エンジン回転数センサ19となる。この場合、制御ユニット40は、エンジン回転数センサ19により検出されたエンジン10の回転数が予め定められた所定の値より大きくなったら、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。これにより、エンジン10の動力は、モータジェネレータ24を介して車輪に伝達されるようになっている。
車両の状態が車速である場合は、車両状態検出手段は、車速センサ50となる。この場合、制御ユニット40は、車速センサ50により検出された車速が予め定められた所定の値より大きくなったら、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。これにより、エンジン10の動力は、モータジェネレータ24を介して車輪に伝達されるようになっている。
車両の状態が動力性能を重視した走行時であるか否かの場合は、車両状態検出手段は、動力性能の状態を検出する動力性能状態検出手段となる。この場合、制御ユニット40は、動力性能状態検出手段により検出された状態が動力性能を重視した走行時であったら、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。これにより、エンジン10の動力は、モータジェネレータ24を介して車輪に伝達されるようになっている。
動力性能を重視した走行時であるか否かが自動変速機30のポジションに対応する場合は、動力性能状態検出手段は、シフトポジションセンサ52となる。この場合、制御ユニット40は、シフトポジションセンサ52により検出された走行ポジションがSポジション、Mポジション、2ポジション、Lポジション、Bポジションのいずれかである場合に、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。
動力性能を重視した走行時であるか否かが自動変速機31の走行モードに対応する場合は、動力性能状態検出手段は、シフトポジションセンサ52となる。この場合、制御ユニット40は、シフトポジションセンサ52により検出された走行モードがスポーツモード、マニュアルモードのいずれかである場合に、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。
動力性能を重視した走行時であるか否かが自動変速機31のアクセルペダル53の操作速度に対応する場合は、動力性能状態検出手段は、アクセルセンサ54となる。この場合、制御ユニット40は、アクセルセンサ54により検出されたアクセルペダル53の踏み込み速度が予め定められた所定の値よりも速い場合に、エンジン10からモータジェネレータ24への動力伝達方法を第1の伝達方法から第2の伝達方法に切り替えるようになっている。
また、本発明の車両の制御装置は、車両が第1の伝達方法で走行している際にエンジン10の停止指令が発せられたら、エンジン10のフューエルカットを行うようになっている。さらに、本発明の車両の制御装置は、車両が第2の伝達方法で走行している際にエンジン10の停止指令が発せられたら、クラッチ22を解放状態に切り替え、エンジン10のフューエルカットを行うようになっている。
この場合、車両の制御装置は、燃料供給装置100と、内燃機関停止指令検出手段と、伝達方法検出手段とを備えている。
内燃機関停止指令検出手段は、エンジン10の停止指令が発せられたことを検出するものであり、制御ユニット40により構成されている。内燃機関停止指令検出手段は、例えば、アクセルペダル53が解放されたことがアクセルセンサ54により検出された場合に、エンジン10の停止指令が発せられたことを検出するようにしている。
伝達方法検出手段は、車両の伝達方法が第1の伝達方法か第2の伝達方法のいずれであるかを検出するものであり、制御ユニット40により構成されている。
よって、制御ユニット40は、車両が第1の伝達方法で走行している際に、エンジン10への停止指令が検出されたら、エンジン10への燃料の供給を停止するよう燃料供給装置100を制御してフューエルカットを行うようになっている。また、制御ユニット40は、車両が第2の伝達方法で走行している際に、エンジン10への停止指令が検出されたら、クラッチ22を解放状態に切り替え、エンジン10への燃料の供給を停止するよう燃料供給装置100を制御してフューエルカットを行うようになっている。
次に、作用について説明する。
図5に示すように、ECU41はエンジン10が駆動中であるか否かを判断する(ステップS1)。ECU41が、エンジン10は駆動中ではないと判断した場合は(ステップS1;NO)、ECU41はメインルーチンに処理を戻す。
ECU41が、エンジン10は駆動中であると判断した場合は(ステップS1;YES)、ECU41は、車速が所定の閾値を超えているか否かを判断する(ステップS2)。車速が閾値を超えているか否かの判断は、車速センサ50からの情報に基づいて、ECU41により行われる。所定の閾値は、例えば100km/hなどとすることができる。
ECU41が、車速は所定の閾値を超えていないと判断した場合は(ステップS2;NO)、クランク軸11の回転数は大きくはないと認定され、ECU41によりクラッチ22は解放状態で良いと判断される。
ECU41は、車両の走行状態が動力性能を重視した走行時であるか否かを判断する(ステップS3)。ここでは、ECU41は、自動変速機30の走行ポジションが所定のポジションであるか否か、走行モードが所定のモードであるか否か、アクセルペダル53の操作速度が予め定められた所定の値を超えているか否かにより、車両の走行状態を判断する。
所定のポジションは、例えば、Sポジション、Mポジション、2ポジション、Lポジション、Bポジションのいずれかであり、ここではMポジションとしている。自動変速機30の変速段がMポジションであるか否かの判断は、シフトポジションセンサ48の情報に基づいて、ECU41により行われる。
所定の走行モードは、例えば、スポーツモード、マニュアルモードのいずれかとしている。走行モードがスポーツモードやマニュアルモードのいずれかであるか否かの判断は、シフトポジションセンサ48の情報に基づいて、ECU41により行われる。
アクセルペダル53の操作速度が予め定められた所定の値を超えているか否かの判断は、アクセルセンサ54の情報に基づいて、ECU41により操作時間の計測と操作速度の算出を経て行われる。
ECU41が、車両の走行状態が動力性能の重視した走行時でないと判断した場合は(ステップS3;NO)、運転者がアクセルペダル53を踏み込んでの加速の応答性を求めていないと認定され、ECU41によりクラッチ22は解放状態で良いと判断される。
これにより、ECU41により第1の伝達方法が選択され、クラッチ22が解放状態にされる(ステップS4)。よって、ワンウェイクラッチ23を利用した走行により回生効率を向上することができる。
一方、ステップS2において、ECU41が車速が閾値を超えていると判断した場合は(ステップS2;YES)、クランク軸11の回転数が大きいと認定される。このため、再加速時の応答遅れを抑制するために、ECU41により第2の伝達方法が選択されてクラッチ22が係合状態にされる(ステップS5)。これにより、クラッチ22を利用した走行によりドライバビリティを向上することができる。
ここで、クラッチ22の係合状態は、クランク軸11の回転数が大きいほど、クラッチ22のピストン81による押圧力を大きくして、クラッチ22の係合力を大きくするようにしてもよい。例えば、クラッチ22の係合を完全係合と半係合との2段階に分けて段階的に作動させることができる。すなわち、クランク軸11の回転数が多少大きい程度であれば半係合にするとともに、クランク軸11の回転数が十分に大きければ完全係合にするようにできる。
ステップS3において、ECU41が車両の走行状態が動力性能を重視した走行時であると判断した場合は(ステップS3;YES)、運転者はアクセルペダル53の応答性を要求するものと認定されるので、ECU41により第2の伝達方法が選択されてクラッチ22が係合状態にされる(ステップS5)。これにより、クラッチ22を利用した走行によりドライバビリティを向上することができる。
次に、エンジン10による走行中にアクセルペダル53を解放した際の動作を、図6に示すフローチャートに沿って説明する。
図6に示すように、ECU41は、エンジン10の停止指令が発せられたか否かを判断する(ステップS11)。ECU41が、エンジン10の停止指令が発せられていないと判断した場合は(ステップS11;NO)、ECU41はメインルーチンに処理を戻す。
ECU41が、エンジン10の停止指令が発せられていると判断した場合は(ステップS11;YES)、ECU41は、車両の伝達方法が第1の伝達方法であるか否かを判断する(ステップS12)。
ECU41が、車両の伝達方法が第1の伝達方法であると判断した場合は(ステップS12;YES)、ECU41はフューエルカットを開始する(ステップS13)。具体的には、ECU41がエンジンECU42を介して燃料噴射弁123を閉塞するとともに、ECU41がエンジンECU42および燃料ポンプコントロールコンピュータ115を介して燃料ポンプ112を停止する。
ECU41が、車両の伝達方法が第1の伝達方法でないと判断した場合は(ステップS12;NO)、ECU41はクラッチ22を解放状態にする(ステップS14)。その後、ECU41は、フューエルカットを開始する(ステップS13)。
上述したエンジン10による走行中にアクセルペダル53を解放した際の動作を、図7および図8に示すタイムチャートに沿って説明する。
図7に示すように、クラッチ22が係合状態でエンジン10により走行している際に、T0において、ECU41により第1の伝達方法が選択されて、クラッチ22が解放状態に変化したとする。この場合、ワンウェイクラッチ23がエンジン10の動力を伝達するようになる。
その後、T1において、運転者はアクセルペダル53を解放する。これにより、エンジン駆動指令がオフになるので、ECU41はエンジン10を停止させる。また、ECU41はフューエルカットフラグをオンにして、フューエルカットを行う。
エンジン10は、フューエルカットされることにより停止される。これにより、エンジン回転数は徐々に低下するとともに、エンジントルクも低下する。また、ワンウェイクラッチ23による伝達トルクが0になる。
図8に示すように、クラッチ22が係合状態でエンジン10により走行している際に、T0において、運転者はアクセルペダル53を解放したとする。これにより、エンジン駆動指令がオフになるので、ECU41はエンジン10を停止させる。また、ECU41はフューエルカットフラグをオンにして、フューエルカットを行う。
また、クラッチ22が解放状態に変化する。これにより、ワンウェイクラッチ23がエンジン10の動力を伝達するようになるが、例えばT1において、クランク軸11の回転数が低減して変速機入力軸31よりも小さくなることにより、ワンウェイクラッチ23による伝達が切断される。
ハイブリッド車両が駐車などで停止するとともにエンジン10が停止している場合には、オイルポンプ34が停止しているため、クラッチ22のピストン部80にはオイルポンプ34から作動油が供給されない。このため、戻りばね83の付勢力によりピストン81が多板部70から離れており、クラッチ22は解放状態となっている。このとき、変速機構35のシフト位置はニュートラルであるようにしている。また、油圧調整バルブ39は開放しておく。
ハイブリッド車両が駐車などで停止するとともにエンジン10が停止している場合にエンジン10を始動するには、モータジェネレータ24に電力を供給する。モータジェネレータ24への電力の供給により、モータジェネレータ24のロータ241が回転する。ロータ241の駆動力は、ロータケース242→ドラム25→スリーブ271→クラッチ出力軸270→トルクコンバータ32という経路を経て、オイルポンプ34に伝達される。
ここで、ロータケース242が回転しても、クラッチ22およびワンウェイクラッチ23は、解放されているので、モータジェネレータ24の動力はエンジン10に伝わることはない。また、トルクコンバータ32の回転により変速機構35の変速機構入力軸33が回転するが、変速機構35のシフト位置がニュートラルであるので、変速機構35の出力軸37は回転しない。
オイルポンプ34から吐出された作動油は、クラッチ22に供給される。ピストン81が多板部70側に摺動し、多板部70が軸方向に押圧されて、クラッチ22が締結される。よって、ロータ241の駆動力が、ロータケース242→多板部70→ハブ部26→入力部21という経路を経て、クランクシャフト11に伝達される。これにより、エンジン10が始動される。
エンジン10の始動後の車両発進時には、エンジン10の駆動力は、クランクシャフト11→入力部21→ハブ部26→クラッチ22→ロータケース242→ドラム25→スリーブ271→クラッチ出力軸270という経路を経て、自動変速機30に伝達される。動力が自動変速機30に伝達されることにより、オイルポンプ34が駆動されるので、作動油がクラッチ22に供給され続けて、クラッチ22の締結が維持される。そして、変速機構35のシフト位置を前進または後進とする。よって、クランクシャフト11の動力が自動変速機30から車輪に伝達されて、ハイブリッド車両が発進する。
また、ハイブリッド車両が駐車などで停止するとともにエンジン10が停止している場合には、上述のようにクラッチ22のピストン部80にはオイルポンプ34から作動油が導入されないので、クラッチ22は解放されている。
ここで、モータジェネレータ24の駆動力のみで発進する場合には、モータジェネレータ24に電力を供給する。モータジェネレータ24への電力の供給により、モータジェネレータ24のロータ241が回転する。ロータ241の駆動力は、ロータケース242→ドラム25→クラッチ出力軸270→トルクコンバータ32という経路を経て、オイルポンプ34に伝達される。
ロータケース242が回転しても、クラッチ22およびワンウェイクラッチ23は、解放されているので、モータジェネレータ24の動力はエンジン10に伝わることはない。また、油圧調整バルブ39は閉塞しておく。これにより、オイルポンプ34からの作動油はクラッチ22に供給されることはない。
トルクコンバータ32の回転に伴い変速機構35の変速機構入力軸33が回転する。そして、変速機構35のシフト位置を前進または後進とする。よって、クランクシャフト11の動力が自動変速機30から車輪に伝達されて、ハイブリッド車両が発進する。
エンジン10を停止したままモータジェネレータ24の駆動力のみで走行しているときに、エンジン10を始動する場合は、油圧調整バルブ39を開放してオイルポンプ34からの作動油をクラッチ22に供給する。クラッチ22に作動油が供給されることにより、クラッチ22が締結される。これにより、モータジェネレータ24の駆動力が、ハブ部26に伝達され、ハブ部26から入力部21を介してクランクシャフト11へ伝達される。よって、エンジン10が始動される。
エンジン10の駆動中かつ停車時においてバッテリ47の電力不足が発生した場合は、エンジン10の駆動力を用いてバッテリ47に充電するようにする。自動変速機30のシフト位置はニュートラルとなっている。エンジン10の駆動力は、ハブ部26からワンウェイクラッチ23を介してロータ241に伝達される。これにより、ロータ241が回転され、モータジェネレータ24が発電機として作動する。よって、バッテリ47が充電される。
車両走行時であって、減速中に車輪の駆動力によりモータジェネレータ24を駆動させて充電する場合、すなわちエンジン10を用いないモータジェネレータ24のみによる回生作動の場合は、車輪の駆動力は、変速機構35を伝わりオイルポンプ34に伝達される。油圧調整バルブ39は閉塞しておく。これにより、オイルポンプ34で発生した作動油はクラッチ22に供給されないので、クラッチ22は解放のまま維持される。変速機構入力軸33に連結されたドラム25が回転し、ロータ241が回転するので、モータジェネレータ24が発電機として作動し、バッテリ47が充電される。
車両走行時であって、減速中の場合に車輪の駆動力によりモータジェネレータ24を駆動させて充電すると同時にエンジンブレーキを作動させる場合は、車輪の駆動力は、自動変速機30を伝わり、オイルポンプ34に伝達される。油圧調整バルブ39は開放しておく。これにより、オイルポンプ34で発生した作動油はクラッチ22に供給され、クラッチ22は締結のまま維持される。
変速機構入力軸33に連結されたドラム25が回転し、ロータ241が回転するので、モータジェネレータ24が発電機として作動し、バッテリ47が充電される。また、ドラム25の回転がクラッチ22を介してクランクシャフト11に伝達される。よって、エンジンブレーキが作動する。
以上のように、本実施の形態に係る車両の制御装置によれば、回生効率を重視してワンウェイクラッチ23を利用する第1の伝達方法と、ドライバビリティを重視してクラッチ22を利用する第2の伝達方法とを、ECU41が車両の状態に応じて切り替える。このため、車両の状態に応じて、ドライバビリティと回生効率とのいずれを重視した走行にするかを切り替えることができる。よって、ドライバビリティと回生効率の両立を図ることができる。
また、本実施の形態に係る車両の制御装置によれば、ECU41は、車速が閾値より大きい場合にクラッチ22を係合状態にしている。このため、クランク軸11の回転数が大きくなる傾向のある状況でECU41がクラッチ22を係合状態にしてエンジン10による走行に切り替えるので、ドライバビリティが向上する。
また、本実施の形態に係る車両の制御装置によれば、ECU41は、シフトポジションがMポジションである場合にクラッチ22を係合状態にしている。このため、Mポジションでは通常はアクセルペダル53の応答性が要求されているので、ドライバビリティの向上を図ることができる。
また、本実施の形態に係る車両の制御装置によれば、ECU41は、走行モードがスポーツモードあるいはマニュアルモードである場合にクラッチ22を係合状態にしている。このため、動力性能重視モードでは通常はアクセルペダル53の応答性が要求されているので、ドライバビリティの向上を図ることができる。
また、本実施の形態に係る車両の制御装置によれば、ECU41は、アクセルペダル53の操作速度が予め定められた所定の値より速い場合にクラッチ22を係合状態にしている。このため、アクセルペダル53の操作速度が予め定められた所定の値より大きい場合は通常はアクセルペダル53の応答性が要求されているので、ドライバビリティの向上を図ることができる。
また、本実施の形態に係る車両の制御装置によれば、図6〜図8に示すように、エンジン10の停止指令が発せられたときには、クラッチ22を解放状態にしてフューエルカットを行うので、エンジントルクが正から負に変わる際の振動の発生を抑えることができる。しかも、図9に示すように、ワンウェイクラッチ23を備えずに係合状態のクラッチのみで伝達を行う場合に比べて、クラッチを解放するまでの時間を短縮できるので、フューエルカットを早期に行うことができる。フューエルカットの早期化により、燃費の向上を図ることができる。
上述した本実施の形態の車両の制御装置においては、シフトポジションがMポジションである場合にクラッチ22を係合状態にした。しかしながら、本発明に係る車両の制御装置においては、これに限られず、例えば、Sポジション、2ポジション、Lポジション、Bポジションのいずれであってもよい。
また、本実施の形態の車両の制御装置においては、車両の状態は、車速と、動力性能を重視した走行時かに基づいてECU41により判断している。しかしながら、本発明に係る車両の制御装置おいては、これに限られず、例えば、クランク軸11の回転数に基づくようにしてもよい。この場合、エンジン回転数センサ19により検出されたクランク軸11の回転数が予め定められた所定の値より大きければ、クラッチ22を係合状態にした第2の伝達方法を選択するようにする。
また、本実施の形態の駆動装置1においては、クラッチ22とワンウェイクラッチ23とはロータ241の内周部で並設した構成としている。しかしながら、本発明に係る駆動装置においては、これに限られず、クラッチ22とワンウェイクラッチ23とはロータ241の内周部で軸方向にオーバーラップした構成であってもよい。
(実施例1)
上述した実施の形態に係るエンジン10を搭載した車両の走行中にアクセルペダル53が解放された際の動作を、実施例1として図7のタイムチャートに示す。
上述した実施の形態に係るエンジン10を搭載した車両の走行中にアクセルペダル53が解放された際の動作を、実施例1として図7のタイムチャートに示す。
クラッチ22が係合状態でエンジン10により走行している際に、T0において、ECU41により第1の伝達方法が選択されて、クラッチ22が解放状態に変化した。この場合、ワンウェイクラッチ23がエンジン10の動力を伝達するようになった。
その後、T1において、運転者はアクセルペダル53を解放した。これにより、エンジン駆動指令がオフになるので、ECU41はエンジン10を停止させた。また、ECU41はフューエルカットフラグをオンにして、フューエルカットを行った。
エンジン10は、フューエルカットされることにより完全に停止された。これにより、エンジン回転数は徐々に低下するとともに、エンジントルクも低下した。また、ワンウェイクラッチ23による伝達トルクが0になった。
したがって、本実施例によれば、アクセルペダル53の解放直後にフューエルカットが実現された。
(実施例2)
上述した実施の形態に係るエンジン10を搭載した車両の走行中にアクセルペダル53が解放された際の動作を、実施例2として図8のタイムチャートに示す。
上述した実施の形態に係るエンジン10を搭載した車両の走行中にアクセルペダル53が解放された際の動作を、実施例2として図8のタイムチャートに示す。
クラッチ22が係合状態でエンジン10により走行している際に、T0において、運転者はアクセルペダル53を解放した。これにより、エンジン駆動指令がオフになるので、ECU41はエンジン10を停止させた。また、ECU41はフューエルカットフラグをオンにして、フューエルカットを行った。
また、クラッチ22が解放状態に変化した。これにより、ワンウェイクラッチ23がエンジン10の動力を伝達するようになるが、例えばT1において、クランク軸11の回転数が低減して変速機入力軸31よりも小さくなることにより、ワンウェイクラッチ23による伝達が切断された。
したがって、本実施例によっても、アクセルペダル53の解放直後にフューエルカットが実現された。
(比較例)
ワンウェイクラッチを有しない駆動ユニットを搭載した車両の走行中にアクセルペダルが解放された際の動作を、比較例として図9のタイムチャートに示す。この駆動ユニットは、ワンウェイクラッチを有しない構成以外の構成は、上述した実施の形態の駆動ユニット20と同様の構成とした。
ワンウェイクラッチを有しない駆動ユニットを搭載した車両の走行中にアクセルペダルが解放された際の動作を、比較例として図9のタイムチャートに示す。この駆動ユニットは、ワンウェイクラッチを有しない構成以外の構成は、上述した実施の形態の駆動ユニット20と同様の構成とした。
クラッチが係合状態でエンジンにより走行している際に、T0において、運転者はアクセルペダルを解放した。これにより、エンジン駆動指令がオフになるので、ECUはエンジンを停止させた。
また、エンジンの吹き上がり防止と引き込み防止を図るため、クラッチは係合状態のまま維持した。そして、エンジントルクが0(Nm)になっての動作が落ち着いたT1において、クラッチを解放状態にするとともに、フューエルカットフラグをオンにしてフューエルカットを行った。
したがって、比較例の構成では、アクセルペダルの解放後、フューエルカットが実行されるまでTaのタイムラグを要した。
実施例1および実施例2によれば比較例に比べて、アクセルペダルの解放からフューエルカットまでのタイムラグを短縮できるので、燃費を向上できることが確認された。
以上のように、本発明に係る車両の制御装置は、ドライバビリティと回生効率とを両立できるという効果を奏するものであり、ハイブリッド車両の制御装置に有用である。
1 駆動装置
10 エンジン
11 クランク軸
19 エンジン回転数センサ
20 駆動ユニット
22 クラッチ
23 ワンウェイクラッチ
24 モータジェネレータ
30 自動変速機
31 変速機入力軸
34 オイルポンプ
40 制御ユニット
41 ECU
50 車速センサ
52 シフトポジションセンサ
53 アクセルペダル
54 アクセルセンサ
10 エンジン
11 クランク軸
19 エンジン回転数センサ
20 駆動ユニット
22 クラッチ
23 ワンウェイクラッチ
24 モータジェネレータ
30 自動変速機
31 変速機入力軸
34 オイルポンプ
40 制御ユニット
41 ECU
50 車速センサ
52 シフトポジションセンサ
53 アクセルペダル
54 アクセルセンサ
Claims (2)
- 内燃機関と、
車輪に連結された電動機と、
前記内燃機関と前記電動機とを切り離す解放状態と、前記内燃機関と前記電動機とを接続する係合状態と、の間で伝達状態を切り替えるクラッチと、
前記内燃機関から前記電動機に正転方向の動力のみを伝達可能なワンウェイクラッチと、
を備える車両の制御装置であって、
前記内燃機関の動力を前記電動機に伝達する際に、前記クラッチを前記解放状態にしたまま前記ワンウェイクラッチを介して前記動力を伝達する第1の伝達方法と、前記クラッチを前記係合状態にして前記クラッチを介して前記動力を伝達する第2の伝達方法とを、前記内燃機関の回転数に応じて切り替えるとともに、
前記内燃機関の回転数が予め定められた所定の値より大きくなったら、前記第1の伝達方法から前記第2の伝達方法に切り替えて、前記内燃機関の動力を前記電動機を介して前記車輪に伝達することを特徴とする車両の制御装置。 - 前記車両が前記第1の伝達方法で走行している際に前記内燃機関の停止指令が発せられたら、前記内燃機関のフューエルカットを行うとともに、
前記車両が前記第2の伝達方法で走行している際に前記内燃機関の停止指令が発せられたら、前記クラッチを前記解放状態に切り替え、前記内燃機関のフューエルカットを行うことを特徴とする請求項2に記載の車両の制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/006006 WO2013061373A1 (ja) | 2011-10-27 | 2011-10-27 | 車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2013061373A1 JPWO2013061373A1 (ja) | 2015-04-02 |
| JP5776783B2 true JP5776783B2 (ja) | 2015-09-09 |
Family
ID=48167244
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013540507A Expired - Fee Related JP5776783B2 (ja) | 2011-10-27 | 2011-10-27 | 車両の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9132834B2 (ja) |
| JP (1) | JP5776783B2 (ja) |
| CN (1) | CN103906642A (ja) |
| WO (1) | WO2013061373A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9776625B2 (en) * | 2014-04-22 | 2017-10-03 | Panasonic Intellectual Property Management Co., Ltd. | Vehicle drive device |
| US9333974B1 (en) * | 2015-01-15 | 2016-05-10 | Ford Global Technologies, Llc | System and method for improving driveline operation |
| JP6319134B2 (ja) * | 2015-02-20 | 2018-05-09 | 株式会社デンソー | 内燃機関の始動装置 |
| DE102015112788A1 (de) * | 2015-08-04 | 2017-02-09 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Verfahren und Steuergerät zum Betreiben eines Kupplungssystems eines Hybridfahrzeugs |
| JP6380682B2 (ja) * | 2015-09-18 | 2018-08-29 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| CN107303806B (zh) * | 2016-04-19 | 2022-06-24 | 舍弗勒技术股份两合公司 | 用于混合动力汽车的动力耦合装置 |
| JP6253000B1 (ja) * | 2016-09-14 | 2017-12-27 | マツダ株式会社 | 車両の制御装置 |
| US10516323B2 (en) * | 2016-10-04 | 2019-12-24 | American Axle & Manufacturing, Inc. | Segmented switched reluctance motor for powertrain electrification |
| JP6531133B2 (ja) * | 2017-04-27 | 2019-06-12 | 本田技研工業株式会社 | ハイブリッド車両の駆動装置 |
| JP2019019951A (ja) * | 2017-07-20 | 2019-02-07 | トヨタ自動車株式会社 | 車両の制御装置 |
| GB2572172A (en) * | 2018-03-21 | 2019-09-25 | Ashwoods Electric Motors Ltd | Radial flux electrical machines |
| JP6769456B2 (ja) * | 2018-05-25 | 2020-10-14 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| DE102019001957C5 (de) * | 2019-03-20 | 2024-03-28 | Mercedes-Benz Group AG | Hybridantriebsystem |
| GB2582811A (en) * | 2019-04-04 | 2020-10-07 | Raicam Clutch Ltd | Vehicle drive lines |
| US11180133B2 (en) * | 2020-02-12 | 2021-11-23 | Borg Warner Inc. | Hybrid-vehicle system |
| US11396286B2 (en) * | 2020-02-12 | 2022-07-26 | Borgwarner Inc. | Hybrid-vehicle system |
| US11440395B2 (en) * | 2020-02-19 | 2022-09-13 | Ford Global Technologies, Llc | Electrified vehicle torque transfer system and method |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4496583B2 (ja) * | 2000-01-17 | 2010-07-07 | いすゞ自動車株式会社 | ロックアップクラッチ付きトルクコンバータ |
| JP3679335B2 (ja) * | 2001-02-06 | 2005-08-03 | Ntn株式会社 | ハイブリッド自動車における動力伝達装置 |
| JP2003278807A (ja) | 2002-03-22 | 2003-10-02 | Toyota Motor Corp | ハイブリッド車用動力伝達装置の制御装置 |
| JP3791481B2 (ja) * | 2002-10-01 | 2006-06-28 | マツダ株式会社 | 車両用パワートレイン構造 |
| JP4972988B2 (ja) * | 2006-05-02 | 2012-07-11 | 日産自動車株式会社 | ハイブリッド車両の伝動状態切り替え制御装置 |
| JP2008126703A (ja) | 2006-11-16 | 2008-06-05 | Mazda Motor Corp | 車両用駆動装置 |
| WO2010041137A1 (en) * | 2008-10-10 | 2010-04-15 | Toyota Jidosha Kabushiki Kaisha | Fluid transmission device |
| JP4735701B2 (ja) | 2008-10-10 | 2011-07-27 | トヨタ自動車株式会社 | 流体伝達装置 |
| JP2011042207A (ja) | 2009-08-20 | 2011-03-03 | Mazda Motor Corp | 車両用駆動制御装置 |
-
2011
- 2011-10-27 JP JP2013540507A patent/JP5776783B2/ja not_active Expired - Fee Related
- 2011-10-27 US US14/354,351 patent/US9132834B2/en not_active Expired - Fee Related
- 2011-10-27 CN CN201180074520.1A patent/CN103906642A/zh active Pending
- 2011-10-27 WO PCT/JP2011/006006 patent/WO2013061373A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN103906642A (zh) | 2014-07-02 |
| JPWO2013061373A1 (ja) | 2015-04-02 |
| US9132834B2 (en) | 2015-09-15 |
| US20140371965A1 (en) | 2014-12-18 |
| WO2013061373A1 (ja) | 2013-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5776783B2 (ja) | 車両の制御装置 | |
| JP5831555B2 (ja) | 車両の制御装置 | |
| US8452469B2 (en) | Control apparatus for hybrid vehicle | |
| JP5299587B1 (ja) | 車両の制御装置 | |
| JP3682964B2 (ja) | 車両用駆動装置 | |
| US9605605B2 (en) | Vehicle control apparatus | |
| US8620566B2 (en) | Hybrid vehicle accelerator pedal depressing force control device | |
| JP5846216B2 (ja) | 車両の制御装置 | |
| JP2006306325A (ja) | 車両用ハイブリッド駆動装置 | |
| JP2014097707A (ja) | 車両の制御装置 | |
| JP2010184535A (ja) | ハイブリッド車両 | |
| JP6091169B2 (ja) | 車両の制御装置 | |
| JP5834748B2 (ja) | 制御装置 | |
| JP2020189592A (ja) | ハイブリッド車両の駆動装置 | |
| WO2014013901A1 (ja) | 車両の制御装置 | |
| JP2013095247A (ja) | 車両の制御装置 | |
| WO2010150081A2 (en) | Vehicular engine start control apparatus | |
| JP5803626B2 (ja) | 車両の制御装置 | |
| JP2013071624A (ja) | 駆動ユニット | |
| JP2013103537A (ja) | 車両用駆動制御装置 | |
| JP2019166941A (ja) | ハイブリッド車両の駆動装置 | |
| JP2013126784A (ja) | 車両の制御装置 | |
| JP4253937B2 (ja) | 車両用駆動装置の制御装置 | |
| JP2013124032A (ja) | 車両の制御装置 | |
| JP2016203934A (ja) | ハイブリッド車両用変速システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150622 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5776783 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |