JP5715744B2 - 部品搭載方法 - Google Patents
部品搭載方法 Download PDFInfo
- Publication number
- JP5715744B2 JP5715744B2 JP2008049552A JP2008049552A JP5715744B2 JP 5715744 B2 JP5715744 B2 JP 5715744B2 JP 2008049552 A JP2008049552 A JP 2008049552A JP 2008049552 A JP2008049552 A JP 2008049552A JP 5715744 B2 JP5715744 B2 JP 5715744B2
- Authority
- JP
- Japan
- Prior art keywords
- component
- angle
- mounting
- suction nozzle
- degrees
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Supply And Installment Of Electrical Components (AREA)
Description
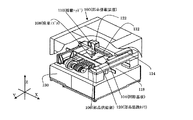
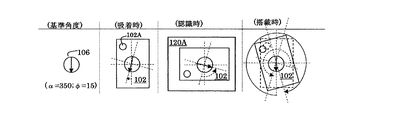
102…部品
104…回路基板
106…部品供給部
108…吸着ノズル
110…搭載ヘッド
112…X軸移動機構
113…X軸モータ
114…Y軸移動機構
115…Y軸モータ
116…Z軸モータ
117…θ軸モータ
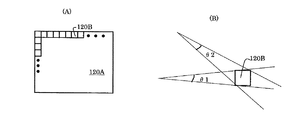
120…部品認識カメラ
120A…撮像面
120B…センサ素子
122…基板認識カメラ
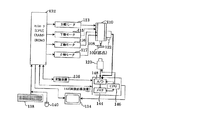
132…コントローラ
136…記憶装置
142…画像認識装置
Claims (1)
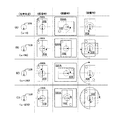
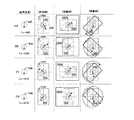
- 部品供給部に供給される部品を吸着ノズルで吸着し、該吸着された部品を部品認識カメラで認識し、該認識した結果を用いて該部品を回路基板に搭載する部品搭載方法において、
前記部品供給部における前記部品の供給される角度と前記回路基板における該部品の搭載される角度との差である差分搭載角度が求められる工程と、
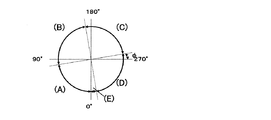
基準角度にある前記吸着ノズルの角度を所定の回転方向に該差分搭載角度で回転させてから該部品が吸着ノズルに吸着される工程と、
該吸着された部品が、該所定の回転方向で前記吸着ノズルと共に、前記部品認識カメラの撮像面を形成する複数のセンサ素子の並ぶ方向と該部品を撮像した際の形状像の向きとが略平行となるように該部品認識カメラの撮像位置に所定角度分だけ回転される工程と、
該回転された部品を該撮像位置で認識して、前記回路基板へ搭載する角度である搭載補正角度を求める工程と、
該認識された部品を前記吸着ノズルと共に該搭載補正角度まで該撮像位置への回転方向と同じ方向に回転させる工程と、
該回転された部品を前記回路基板に搭載する工程と、
を備え、
前記基準角度にある前記吸着ノズルの方向と、前記部品認識カメラの撮像面を形成する複数のセンサ素子の並ぶ方向と、前記部品供給部に供給される前記部品の方向と、を平行とし、
前記搭載補正角度を、前記吸着ノズルの角度が前記基準角度に略同一に戻る角度とし、
更に、前記所定角度分を、90*n度(前記差分搭載角度=0のときには、nは1乃至3のいずれかの整数で、該差分搭載角度≠0のときには、nは0乃至3のいずれかの整数)としていることを特徴とする部品搭載方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008049552A JP5715744B2 (ja) | 2008-02-29 | 2008-02-29 | 部品搭載方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008049552A JP5715744B2 (ja) | 2008-02-29 | 2008-02-29 | 部品搭載方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009206405A JP2009206405A (ja) | 2009-09-10 |
| JP5715744B2 true JP5715744B2 (ja) | 2015-05-13 |
Family
ID=41148362
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008049552A Expired - Fee Related JP5715744B2 (ja) | 2008-02-29 | 2008-02-29 | 部品搭載方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5715744B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113993296B (zh) * | 2020-11-25 | 2023-06-30 | 深圳市安泰自动化设备有限公司 | 一种led贴片校准方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2633147B2 (ja) * | 1992-07-23 | 1997-07-23 | 松下電工株式会社 | 部品実装方法 |
| JP3774011B2 (ja) * | 1997-01-20 | 2006-05-10 | ヤマハ発動機株式会社 | 部品実装方法及び同装置 |
| JPH1197897A (ja) * | 1997-09-18 | 1999-04-09 | Matsushita Electric Ind Co Ltd | 部品装着方法および装置 |
| JP4765199B2 (ja) * | 2001-05-31 | 2011-09-07 | ソニー株式会社 | 部品実装装置 |
-
2008
- 2008-02-29 JP JP2008049552A patent/JP5715744B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009206405A (ja) | 2009-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160110110A (ko) | 본딩 장치 및 본딩 방법 | |
| JP2007220837A (ja) | 電子部品実装方法及び装置 | |
| JP2022044608A (ja) | ロボットシステム、デバイス製造装置、デバイス製造方法 | |
| CN108307616B (zh) | 部件安装系统及部件安装方法以及修正值计算装置 | |
| JP6547137B2 (ja) | 部品実装システムおよび部品実装方法ならびに補正値算出装置 | |
| JP6190229B2 (ja) | 部品実装装置 | |
| JP6438826B2 (ja) | ボンディング装置及びボンディング方法 | |
| JP2013251398A (ja) | 部品実装装置および部品実装方法 | |
| JP5715744B2 (ja) | 部品搭載方法 | |
| JP4664015B2 (ja) | 電子部品実装方法および電子部品実装装置 | |
| US11357146B2 (en) | Component mounting machine | |
| JP2012019144A (ja) | 部品実装方法 | |
| KR102205705B1 (ko) | 산업용 로봇의 보정값 산출 방법 | |
| JP2004288824A (ja) | 電子部品装着装置のキャリブレーション法及びその方法を用いた装置 | |
| JP2019145585A (ja) | 産業用ロボットの補正値算出方法 | |
| JP6999443B2 (ja) | 産業用ロボットの補正値算出方法 | |
| CN115018916B (zh) | 利用单目相机对机器人空间位置进行纠偏的方法及系统 | |
| JP4707596B2 (ja) | 部品搭載方法 | |
| JP5398314B2 (ja) | 露光装置、及び露光方法 | |
| JP5271654B2 (ja) | 電子部品実装装置 | |
| JP6985814B2 (ja) | 基板作業機 | |
| JP4902305B2 (ja) | 露光装置およびアライメント方法 | |
| JP7531760B1 (ja) | 支援装置、支援システム、支援方法及びプログラム | |
| JP4931772B2 (ja) | 電子部品実装装置 | |
| JP4860366B2 (ja) | 表面実装装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120410 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130108 |
|
| RD13 | Notification of appointment of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7433 Effective date: 20130228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130228 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140122 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140130 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20140404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150316 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5715744 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |