JP5533826B2 - 電流センサおよび電流センサの組み付け構造 - Google Patents
電流センサおよび電流センサの組み付け構造 Download PDFInfo
- Publication number
- JP5533826B2 JP5533826B2 JP2011203969A JP2011203969A JP5533826B2 JP 5533826 B2 JP5533826 B2 JP 5533826B2 JP 2011203969 A JP2011203969 A JP 2011203969A JP 2011203969 A JP2011203969 A JP 2011203969A JP 5533826 B2 JP5533826 B2 JP 5533826B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- sensor
- magnetic
- signal
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
Description
そして、請求項3に記載の発明では、第2検出部を構成するピン層の磁化方向と平行となる第2磁界を理想第2磁界とし、第1検出部を構成するピン層の磁化方向と平行となる第1磁界を理想第1磁界とすると、信号処理部は、理想第2磁界と第2磁界との成す角度をαとし、理想第1磁界と第1磁界との成す角度をβとしたとき、角度α、βを記憶する記憶手段を有するものとし、演算回路は、理想第2磁界と合成磁界との成す角度をθ´とし、第1検出部から入力される正弦値を含む信号を第2検出部から入力される余弦値を含む信号で除算した値をtanθ´としたとき、記憶手段に記憶されている角度α、βを用いて次式

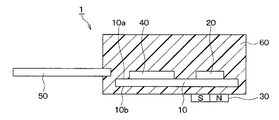
本発明の第1実施形態について図面を参照しつつ説明する。図1は、本実施形態における電流センサを被検出電流経路としてのバスバーに取り付けたときの模式図、図2は図1に示す電流センサの断面構成を示す図である。なお、本実施形態における電流センサは、例えば、車載バッテリ等に接続されるバスバーに流れる被検出電流を検出するものに用いられると好適である。
本発明の第2実施形態について説明する。本実施形態は、上記第1実施形態に対して、バイアス磁石30の形状を変更したものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図6は、本実施形態における電流センサ1の平面図である。
本発明の第3実施形態について説明する。本実施形態は、第1実施形態に対して、磁界発生手段を変更したものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図7は、本実施形態における電流センサ1の平面図である。
本発明の第5実施形態について説明する。上記各実施形態では、第1検出部21(第2検出部22)の磁化方向とバイアス磁界Bbとが垂直(平行)となるように電流センサ1を構成し、第1検出部21(第2検出部22)の磁化方向と電流磁界Biとが平行(垂直)となるように電流センサ1をバスバー70に組み付けたものを説明した。しかしながら、実際には、磁気センサ20は配置予定領域に対してずれて配置されることがあり、電流センサ1は配置予定領域に対してずれて配置されることがある。つまり、磁気センサ20とバイアス磁石30との角度ずれによって第1検出部21(第2検出部22)の磁化方向とバイアス磁界Bbとが非垂直(非平行)となったり、電流センサ1(磁気センサ20)とバスバー70との角度ずれによって第1検出部21(第2検出部22)の磁化方向と電流磁界Biとが非平行(非垂直)になったりすることがある。この場合、第1、第2検出部21、22から出力される信号Va1、Va2、Vb1、Vb2にはこれらの角度ずれが含まれることになる。このため、演算回路44で第1、第2差動増幅回路42、43から入力される信号Va、Vbを除算した値をそのままセンサ信号として出力すると、このセンサ信号は角度ずれを含む信号となり検出精度が低下することになる。
本発明の第6実施形態について説明する。本実施形態は、第1実施形態に対して2つの磁気センサ20と2つのバイアス磁石30を備えたものであり、その他に関しては第1実施形態と同様であるためここでは説明を省略する。図12は、電流センサ1の平面図である。
本発明の第7実施形態について説明する。本実施形態は、第6実施形態に対してバイアス磁石30を一つにしたものであり、その他に関しては第6実施形態と同様であるため、ここでは説明を省略する。図15は、本実施形態における電流センサ1の断面構成を示す図である。
本発明の第8実施形態について説明する。本実施形態は、上記第1実施形態に対して、磁気センサ20に第1検出部21のみを備えたものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図16は、電流センサ1の回路構成を示す図である。
本発明の第9実施形態について説明する。本実施形態は、上記第1実施形態に対して、バイアス磁石30をモールド樹脂60の外側に配置したものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図17は、本実施形態における電流センサ1の断面構成を示す図である。
本発明の第10実施形態について説明する。本実施形態は、第1実施形態に対して、磁気コアを備えたものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図18は、本実施形態における電流センサをバスバー70に取り付けたときの模式図である。
本発明の第11実施形態について説明する。本実施形態は、第1実施形態に対して、磁気センサ20に磁気コアを備えたものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図19は、本実施形態における磁気センサ20の平面図である。
本発明の第12実施形態について説明する。本実施形態は、第1実施形態に対して、磁界発生手段を変更したものであり、その他に関しては第1実施形態と同様であるため、ここでは説明を省略する。図20は、本実施形態における磁気抵抗素子の断面構成を示す図である。
上記第1〜第7実施形態では、第1検出部21から正弦値を含む信号を出力すると共に第2検出部22から余弦値を含む信号を出力するものを説明したが、磁気センサ20とバイアス磁石30との配置方法を変更して第1検出部21から余弦値を含む信号を出力すると共に第2検出部22から正弦値を含む信号を出力するようにしてもよい。
20 磁気センサ
21 第1検出部
21a〜21d 磁気抵抗素子
22 第2検出部
22a〜22d 磁気抵抗素子
30 バイアス磁石
40 回路チップ
44 演算回路
50 リード
60 モールド樹脂
Claims (22)
- 被検出電流経路に被検出電流が流れることによって生じる第1磁界と垂直方向に第2磁界を生成する磁界発生手段と、
磁化方向が所定方向に固定されたピン層、絶縁体で構成されるトンネル層、外部磁化に応じて磁化方向が変化するフリー層が順に積層されてなる磁気抵抗素子を有し、前記第2磁界と、前記第1、第2磁界で構成される合成磁界との成す角度θに応じた正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方を出力する磁気センサと、
前記磁気センサから前記正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方が入力され、入力された信号に対して所定の演算を行って演算結果に対応するセンサ信号を出力する演算回路を有する信号処理部と、を備え、
前記演算回路は、入力された信号を用いて前記成す角度θにおける正接値を演算することによって(前記第1磁界)/(前記第2磁界)を演算し、前記正接値に対応する信号を前記センサ信号として出力することによって前記第1磁界に比例した前記センサ信号を出力することを特徴とする電流センサ。 - 前記磁気センサは、前記ピン層の磁化方向が所定方向に固定され、前記成す角度θに応じた正弦値を含む信号を出力する前記磁気抵抗素子が形成された第1検出部と、前記ピン層の磁化方向が前記所定方向と垂直方向に固定され、前記成す角度θに応じた余弦値を含む信号を出力する前記磁気抵抗素子が形成された第2検出部と、を有し、
前記演算回路は、前記第1検出部から入力される正弦値を含む信号を前記第2検出部から入力される余弦値を含む信号で除算して前記正接値を演算することを特徴とする請求項1に記載の電流センサ。 - 被検出電流経路に被検出電流が流れることによって生じる第1磁界と垂直方向に第2磁界を生成する磁界発生手段と、
磁化方向が所定方向に固定されたピン層、絶縁体で構成されるトンネル層、外部磁化に応じて磁化方向が変化するフリー層が順に積層されてなる磁気抵抗素子を有し、前記第2磁界と、前記第1、第2磁界で構成される合成磁界との成す角度θに応じた正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方を出力する磁気センサと、
前記磁気センサから前記正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方が入力され、入力された信号に対して所定の演算を行って演算結果に対応するセンサ信号を出力する演算回路を有する信号処理部と、を備え、
前記磁気センサは、前記ピン層の磁化方向が所定方向に固定され、前記成す角度θに応じた正弦値を含む信号を出力する前記磁気抵抗素子が形成された第1検出部と、前記ピン層の磁化方向が前記所定方向と垂直方向に固定され、前記成す角度θに応じた余弦値を含む信号を出力する前記磁気抵抗素子が形成された第2検出部と、を有し、
前記第2検出部を構成する前記ピン層の磁化方向と平行となる前記第2磁界を理想第2磁界とし、前記第1検出部を構成する前記ピン層の磁化方向と平行となる前記第1磁界を理想第1磁界とすると、
前記信号処理部は、前記理想第2磁界と前記第2磁界との成す角度をαとし、前記理想第1磁界と前記第1磁界との成す角度をβとしたとき、前記角度α、βを記憶する記憶手段を有し、
前記演算回路は、前記理想第2磁界と前記合成磁界との成す角度をθ´とし、前記第1検出部から入力される正弦値を含む信号を前記第2検出部から入力される余弦値を含む信号で除算した値をtanθ´としたとき、前記記憶手段に記憶されている前記角度α、βを用いて次式
- 被検出電流経路に被検出電流が流れることによって生じる第1磁界と垂直方向に第2磁界を生成する磁界発生手段と、
磁化方向が所定方向に固定されたピン層、絶縁体で構成されるトンネル層、外部磁化に応じて磁化方向が変化するフリー層が順に積層されてなる磁気抵抗素子を有し、前記第2磁界と、前記第1、第2磁界で構成される合成磁界との成す角度θに応じた正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方を出力する磁気センサと、
前記磁気センサから前記正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方が入力され、入力された信号に対して所定の演算を行って演算結果に対応するセンサ信号を出力する演算回路を有する信号処理部と、を備え、
前記磁気センサは、前記ピン層の磁化方向が所定方向に固定され、前記成す角度θに応じた正弦値を含む信号を出力する前記磁気抵抗素子が形成された第1検出部と、前記ピン層の磁化方向が前記所定方向と垂直方向に固定され、前記成す角度θに応じた余弦値を含む信号を出力する前記磁気抵抗素子が形成された第2検出部と、を有し、
前記第2検出部を構成する前記ピン層の磁化方向と平行となる前記第2磁界を理想第2磁界とすると、
前記信号処理部は、前記理想第2磁界と前記第2磁界との成す角度をαとしたとき、前記角度αを記憶する記憶手段を有し、
前記演算回路は、前記理想第2磁界と前記合成磁界との成す角度をθ´とし、前記第1検出部から入力される正弦値を含む信号を前記第2検出部から入力される余弦値を含む信号で除算した値をtanθ´としたとき、前記記憶手段に記憶されている前記角度αを用いて次式
- 被検出電流経路に被検出電流が流れることによって生じる第1磁界と垂直方向に第2磁界を生成する磁界発生手段と、
磁化方向が所定方向に固定されたピン層、絶縁体で構成されるトンネル層、外部磁化に応じて磁化方向が変化するフリー層が順に積層されてなる磁気抵抗素子を有し、前記第2磁界と、前記第1、第2磁界で構成される合成磁界との成す角度θに応じた正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方を出力する磁気センサと、
前記磁気センサから前記正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方が入力され、入力された信号に対して所定の演算を行って演算結果に対応するセンサ信号を出力する演算回路を有する信号処理部と、を備え、
前記磁気センサは、前記ピン層の磁化方向が所定方向に固定され、前記成す角度θに応じた正弦値を含む信号を出力する前記磁気抵抗素子が形成された第1検出部と、前記ピン層の磁化方向が前記所定方向と垂直方向に固定され、前記成す角度θに応じた余弦値を含む信号を出力する前記磁気抵抗素子が形成された第2検出部と、を有し、
前記第1検出部を構成する前記ピン層の磁化方向と平行となる前記第1磁界を理想第1磁界とすると、
前記信号処理部は、前記理想第1磁界と前記第1磁界との成す角度をβとしたとき、前記角度βを記憶する記憶手段を有し、
前記演算回路は、前記理想第2磁界と前記合成磁界との成す角度をθ´とし、前記第1検出部から入力される正弦値を含む信号を前記第2検出部から入力される余弦値を含む信号で除算した値をtanθ´としたとき、前記記憶手段に記憶されている前記角度βを用いて次式
- 前記演算回路は、前記磁気センサから正弦値を含む信号または余弦値を含む信号が入力されると、前記正弦値を含む信号の正弦値から余弦値を演算し、または前記余弦値を含む信号の余弦値から正弦値を演算し、この演算値と入力された信号から前記正接値を演算することを特徴とする請求項1に記載の電流センサ。
- 前記磁界発生手段は、磁石であり、
前記磁気センサは、前記磁石上に配置されていることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。 - 前記磁界発生手段は、所定方向に延設された第1部位と、前記第1部位の両端に前記所定方向と垂直方向に延設された第2部位とを備えたコの字状の磁石であり、
前記磁気センサは、前記第2部位の間に配置されていることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。 - 前記磁界発生手段は、電流が流れると前記第2磁界を生成するコイルであることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。
- 前記磁界発生手段は、前記磁気センサ内に形成され、電流が流れると前記第2磁界を生成する薄膜コイルであることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。
- 前記第2磁界の大きさは、所定時毎に前記コイルに流れる電流の大きさが変化させられることによって変化することを特徴とする請求項9または10に記載の電流センサ。
- 前記磁界発生手段は、前記フリー層上に積層された強磁性膜であることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。
- 前記磁界発生手段は、前記ピン層を構成する強磁性膜であることを特徴とする請求項1ないし6のいずれか1つに記載の電流センサ。
- 前記磁気センサは複数備えられ、それぞれの前記磁気センサに前記磁界発生手段から印加される前記第2磁界の大きさが互いに異なっていることを特徴とする請求項1ないし13のいずれか1つに記載の電流センサ。
- 複数の前記磁気センサは、それぞれ前記磁界発生手段との距離が互いに異なっていることを特徴とする請求項14に記載の電流センサ。
- 前記磁界発生手段は、複数備えられて大きさが互いに異なる前記第2磁界を生成していることを特徴とする請求項14に記載の電流センサ。
- 被検出電流経路に被検出電流が流れることによって生じる第1磁界と垂直方向に第2磁界を生成する磁界発生手段と、
磁化方向が所定方向に固定されたピン層、絶縁体で構成されるトンネル層、外部磁化に応じて磁化方向が変化するフリー層が順に積層されてなる磁気抵抗素子を有し、前記第2磁界と、前記第1、第2磁界で構成される合成磁界との成す角度θに応じた正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方を出力する磁気センサと、
前記磁気センサから前記正弦値を含む信号および余弦値を含む信号の少なくともいずれか一方が入力され、入力された信号に対して所定の演算を行って演算結果に対応するセンサ信号を出力する演算回路を有する信号処理部と、を備え、
前記磁気センサは2つ備えられ、それぞれの前記磁気センサに前記磁界発生手段から印加される前記第2磁界の大きさが互いに異なっているおり、
前記演算回路は、2つの前記磁気センサから入力された信号からそれぞれ前記成す角度θにおける正接値を演算し、2つの前記磁気センサのうち印加される前記第2磁界が小さい一方の前記磁気センサの信号から演算した正接値に対して所定のオフセットを付加し、付加した演算値と他方の磁気センサの信号から演算した正接値とを比較して絶対値の小さい値を前記センサ信号として出力することを特徴とする電流センサ。 - 前記信号処理部は、回路チップに形成されており、
前記磁気センサおよび前記回路チップは一体的にモールド樹脂によって封止されていることを特徴とする請求項1ないし17のいずれか1つに記載の電流センサ。 - 前記磁気センサはモールド樹脂に封止されており、
前記信号処理部は、前記モールド樹脂の内部から外部に突出して備えられているリードを介して前記磁気センサの信号が入力されることを特徴とする請求項1ないし17のいずれか1つに記載の電流センサ。 - 前記被検出電流経路を囲むと共に一部にギャップが形成され、前記第1磁界を集磁する磁気コアを備え、
前記ギャップに前記磁気センサが配置されていることを特徴とする請求項1ないし19のいずれか1つに記載の電流センサ。 - 前記磁気センサには、前記第1磁界を集磁する磁気コアが形成されていることを特徴とする請求項1ないし19のいずれか1つに記載の電流センサ。
- 請求項1ないし21のいずれか1つに記載の電流センサを、前記第2磁界と前記被検出電流経路に流れる電流方向とが平行となるように前記被検出電流経路に組み付けてなる電流センサの組み付け構造。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011203969A JP5533826B2 (ja) | 2011-09-19 | 2011-09-19 | 電流センサおよび電流センサの組み付け構造 |
| US13/613,835 US9638767B2 (en) | 2011-09-19 | 2012-09-13 | Current sensor and attachment structure of the same |
| CN201210350482.4A CN103018522B (zh) | 2011-09-19 | 2012-09-19 | 电流传感器及其附着结构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011203969A JP5533826B2 (ja) | 2011-09-19 | 2011-09-19 | 電流センサおよび電流センサの組み付け構造 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013064663A JP2013064663A (ja) | 2013-04-11 |
| JP2013064663A5 JP2013064663A5 (ja) | 2013-05-30 |
| JP5533826B2 true JP5533826B2 (ja) | 2014-06-25 |
Family
ID=47881457
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011203969A Expired - Fee Related JP5533826B2 (ja) | 2011-09-19 | 2011-09-19 | 電流センサおよび電流センサの組み付け構造 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9638767B2 (ja) |
| JP (1) | JP5533826B2 (ja) |
| CN (1) | CN103018522B (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103219695B (zh) * | 2013-05-10 | 2016-04-27 | 南通大学 | 一种过流保护方法及其过流保护集成电路芯片封装 |
| JPWO2015019534A1 (ja) * | 2013-08-06 | 2017-03-02 | パナソニックIpマネジメント株式会社 | 磁気センサおよびこの磁気センサを用いた電流センサ |
| DE102013112628A1 (de) * | 2013-11-15 | 2015-05-21 | Epcos Ag | Vorrichtung, Anordnung und Verfahren zur Messung einer Stromstärke in einem stromdurchflossenen Primärleiter |
| JP2015210158A (ja) * | 2014-04-25 | 2015-11-24 | 株式会社デンソー | 電流センサ |
| US20170153125A1 (en) * | 2014-06-18 | 2017-06-01 | Mitsubishi Electric Corporation | Magnetic sensor device and method for producing same |
| US9958480B2 (en) * | 2015-02-10 | 2018-05-01 | Qualcomm Incorporated | Apparatus and method for a current sensor |
| CN104730318B (zh) * | 2015-04-13 | 2017-06-16 | 南京康尼机电股份有限公司 | 周期性强变化磁场下霍尔器件的电流采样电路及方法 |
| GB2545012A (en) * | 2015-12-03 | 2017-06-07 | Prec Varionic Int Ltd | A non-contact sensor |
| DE102016114174B4 (de) * | 2016-08-01 | 2019-10-10 | Infineon Technologies Ag | Hall-sensor-bauelemente und verfahren zum betreiben derselben |
| KR102597387B1 (ko) * | 2016-12-02 | 2023-11-06 | 퍼듀 리서치 파운데이션 | 차량 배터리 전류 감지 시스템 |
| US10823764B2 (en) * | 2017-09-01 | 2020-11-03 | Te Connectivity Corporation | Hall effect current sensor |
| JP2021028571A (ja) * | 2017-09-27 | 2021-02-25 | 株式会社村田製作所 | 電流センサ |
| US20210190893A1 (en) * | 2017-10-06 | 2021-06-24 | Melexis Technologies Nv | Magnetic sensor sensitivity matching calibration |
| JP2019070563A (ja) * | 2017-10-06 | 2019-05-09 | 株式会社デンソー | 電流センサ |
| JP2021117004A (ja) * | 2020-01-22 | 2021-08-10 | 株式会社東芝 | チップパッケージ |
| JP2022029354A (ja) * | 2020-08-04 | 2022-02-17 | Tdk株式会社 | 磁気センサシステムおよびレンズ位置検出装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000055997A (ja) | 1998-08-05 | 2000-02-25 | Tdk Corp | 磁気センサ装置および電流センサ装置 |
| JP2002365350A (ja) * | 2001-06-06 | 2002-12-18 | Fuji Electric Co Ltd | 磁気検出装置 |
| CN1295515C (zh) * | 2001-11-26 | 2007-01-17 | 旭化成电子株式会社 | 电流传感器 |
| JP2005049184A (ja) | 2003-07-28 | 2005-02-24 | Fuji Electric Fa Components & Systems Co Ltd | 電流センサおよび過電流判定装置 |
| EP1720027B1 (en) * | 2004-02-19 | 2010-11-17 | Mitsubishi Electric Corporation | Magnetic field detector and current detection device, position detection device and rotation detection device using the magnetic field detector |
| US7084617B2 (en) | 2004-04-21 | 2006-08-01 | Denso Corporation | Electric current sensor having magnetic gap |
| JP4573736B2 (ja) * | 2005-08-31 | 2010-11-04 | 三菱電機株式会社 | 磁界検出装置 |
| JP2007078416A (ja) | 2005-09-12 | 2007-03-29 | Denso Corp | 電流センサおよび電流検出方法 |
| JP2007155399A (ja) | 2005-12-01 | 2007-06-21 | Tokai Rika Co Ltd | 電流センサ、及び、それを有する電流値算出システム |
| JP2007218700A (ja) * | 2006-02-15 | 2007-08-30 | Tdk Corp | 磁気センサおよび電流センサ |
| JP4991322B2 (ja) | 2006-10-30 | 2012-08-01 | 日立オートモティブシステムズ株式会社 | Gmr素子を用いた変位センサ,gmr素子を用いた角度検出センサ及びそれらに用いる半導体装置 |
| CN102016513B (zh) * | 2009-03-30 | 2013-04-10 | 日立金属株式会社 | 旋转角度检测装置 |
| JP2010286270A (ja) | 2009-06-09 | 2010-12-24 | Alps Green Devices Co Ltd | 電流センサ |
| JP5463851B2 (ja) * | 2009-10-23 | 2014-04-09 | 株式会社デンソー | 電流センサ |
| JP5540882B2 (ja) * | 2010-05-19 | 2014-07-02 | 株式会社デンソー | 電流センサ |
-
2011
- 2011-09-19 JP JP2011203969A patent/JP5533826B2/ja not_active Expired - Fee Related
-
2012
- 2012-09-13 US US13/613,835 patent/US9638767B2/en active Active
- 2012-09-19 CN CN201210350482.4A patent/CN103018522B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9638767B2 (en) | 2017-05-02 |
| CN103018522B (zh) | 2015-07-08 |
| US20130073238A1 (en) | 2013-03-21 |
| JP2013064663A (ja) | 2013-04-11 |
| CN103018522A (zh) | 2013-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5533826B2 (ja) | 電流センサおよび電流センサの組み付け構造 | |
| US8519704B2 (en) | Magnetic-balance-system current sensor | |
| JP5482736B2 (ja) | 電流センサ | |
| JP5263024B2 (ja) | 回転角検出装置および回転速度検出装置 | |
| JP4105142B2 (ja) | 電流センサ | |
| US7795862B2 (en) | Matching of GMR sensors in a bridge | |
| JP5906488B2 (ja) | 電流センサ | |
| US10557726B2 (en) | Systems and methods for reducing angle error for magnetic field angle sensors | |
| JP2007218700A (ja) | 磁気センサおよび電流センサ | |
| WO2015133621A1 (ja) | 電流量検出器 | |
| JP5888402B2 (ja) | 磁気センサ素子 | |
| US11313923B2 (en) | Method for measuring a magnetic field using a magnetic field sensor device having a second magnetic field sensor between parts of a first magnetic field sensor | |
| CN109212439A (zh) | 磁场传感器 | |
| US9933462B2 (en) | Current sensor and current measuring device | |
| JPWO2012053296A1 (ja) | 電流センサ | |
| JP6384677B2 (ja) | 電流センサ | |
| JP6321323B2 (ja) | 磁気センサ | |
| JP6897106B2 (ja) | 電流センサの信号補正方法、及び電流センサ | |
| JP2018115929A (ja) | 電流センサの信号補正方法、及び電流センサ | |
| JP5678285B2 (ja) | 電流センサ | |
| JP2010536013A (ja) | 導電体を流れる電流を測定する装置および方法 | |
| JP2013047610A (ja) | 磁気平衡式電流センサ | |
| JP2012159309A (ja) | 磁気センサおよび磁気センサ装置 | |
| JP2012002561A (ja) | 電流センサ | |
| JP6285641B2 (ja) | 磁気センサ及び磁場成分演算方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130125 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131001 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140401 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5533826 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140414 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |