JP5489641B2 - 焦点検出装置及びその制御方法 - Google Patents
焦点検出装置及びその制御方法 Download PDFInfo
- Publication number
- JP5489641B2 JP5489641B2 JP2009244890A JP2009244890A JP5489641B2 JP 5489641 B2 JP5489641 B2 JP 5489641B2 JP 2009244890 A JP2009244890 A JP 2009244890A JP 2009244890 A JP2009244890 A JP 2009244890A JP 5489641 B2 JP5489641 B2 JP 5489641B2
- Authority
- JP
- Japan
- Prior art keywords
- focus detection
- image
- detection
- pair
- focus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/34—Systems for automatic generation of focusing signals using different areas in a pupil plane
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/134—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on three different wavelength filter elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/805—Coatings
- H10F39/8057—Optical shielding
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/805—Coatings
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10F—INORGANIC SEMICONDUCTOR DEVICES SENSITIVE TO INFRARED RADIATION, LIGHT, ELECTROMAGNETIC RADIATION OF SHORTER WAVELENGTH OR CORPUSCULAR RADIATION
- H10F39/00—Integrated devices, or assemblies of multiple devices, comprising at least one element covered by group H10F30/00, e.g. radiation detectors comprising photodiode arrays
- H10F39/80—Constructional details of image sensors
- H10F39/806—Optical elements or arrangements associated with the image sensors
- H10F39/8063—Microlenses
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Optics & Photonics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Description
図1は本実施形態における光学機器の一例として、カメラの構成を示すブロック図である。
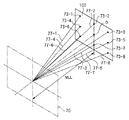
tanθ={(ya−yb)/(xa−xb)} …(1)
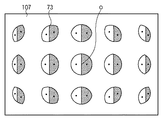
一方、A像、B像瞳領域の重心位置78a、78bの座標は、撮像素子107上の画素73を像高として表した座標(xs、ys)と、第1及び第2の射出窓71、72の情報と、撮像素子107固有のML瞳距離MLLとから、幾何学的に求めることができる。ここで第1及び第2の射出窓71、72の情報とは、以下の情報を示す。即ち、図9(c)における、撮像素子107から第1の射出窓71までの距離L71と、撮像素子107から第2の射出窓72までの距離L72と、第1の射出窓71の直径D71と、第2の射出窓72の直径D72である。
次に、本発明の第2の実施形態について説明する。なお、カメラの全体構成は第1の実施形態で説明したものと同様であるため、ここでは説明を省略する。
上述した第1の実施形態では、撮影する画像に応じて、任意の領域を焦点調節領域として設定することを可能としたが、本実施形態では、焦点検出領域が固定されているところが第1の実施形態と異なる。
Claims (9)
- 検出領域に対応する2像の位相差に基づいて当該検出領域における焦点ずれ量を検出する焦点検出装置であって、
撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光する複数の焦点検出用画素を有し、当該複数の焦点検出用画素から対の像の信号が出力される撮像素子と、
撮像画角に対する前記検出領域の位置情報と、前記撮影レンズの射出窓情報とに応じて、前記検出領域の傾きを決定する決定手段と、
前記複数の焦点検出用画素のうち、前記決定手段により傾きの決定された前記検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出手段と
を有することを特徴とする焦点検出装置。 - 撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光する複数の焦点検出用画素を有し、当該複数の焦点検出用画素から対の像の信号が出力される撮像素子と、
予め設定された複数の検出領域から1つを選択する選択手段と、
前記選択された検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出手段と、を有し、
前記複数の検出領域は、各検出領域の像高に応じて異なる傾きを有することを特徴とする焦点検出装置。 - 検出領域に対応する2像の位相差に基づいて当該検出領域における焦点ずれ量を検出する焦点検出装置であって、
撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光して、対の像の信号を出力する焦点検出用画素を含む撮像素子と、
前記対の光束による対の像の像ズレ方向に対応して、前記検出領域の傾きを決定する決定手段と、
前記決定手段により傾きの決定された前記検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出手段と
を有することを特徴とする焦点検出装置。 - 前記傾きは、傾きをθ、異なる瞳領域を透過した一方の光束を受光する焦点検出用画素における重心位置の座標を(xa、ya)、もう一方の光束を受光する焦点検出用画素における重心位置の座標を(xb、yb)とした場合に
tanθ={(ya−yb)/(xa−xb)}
により求められることを特徴とする請求項1乃至3のいずれか1項に記載の焦点検出装置。 - 前記焦点検出用画素は、それぞれ、前記撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光するように、対の受光領域を有することを特徴とする請求項1乃至4のいずれか1項に記載の焦点検出装置。
- 前記検出領域は、前記焦点検出用画素が縦方向に並べられた複数の画素ブロックを、前記傾きの方向に並べた構成を有し、
前記検出手段は、同じ瞳領域を透過した光束に基づいて得られる信号を前記画素ブロックごとに加算して得られた一対の信号の位相差に基づいて、前記焦点ずれ量を検出することを特徴とする請求項1乃至5のいずれか1項に記載の焦点検出装置。 - 検出領域に対応する2像の位相差に基づいて当該検出領域における焦点ずれ量を検出する焦点検出装置の制御方法であって、
撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光する複数の焦点検出用画素を有し、当該複数の焦点検出用画素から対の像の信号が出力される撮像素子から、該対の像の信号を読み出す読み出しステップと、
撮像画角に対する前記検出領域の位置情報と、前記撮影レンズの射出窓情報とに応じて、前記検出領域の傾きを決定する決定ステップと、
前記複数の焦点検出用画素のうち、前記決定ステップで傾きが決定された前記検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出ステップと
を有することを特徴とする焦点検出装置の制御方法。 - 撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光する複数の焦点検出用画素を有し、当該複数の焦点検出用画素から対の像の信号が出力される撮像素子から、該対の像の信号を読み出す読み出しステップと、
予め設定された複数の検出領域から1つを選択する選択ステップと、
前記選択された検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出ステップと、を有し
前記複数の検出領域は、各検出領域の像高に応じて異なる傾きを有することを特徴とする焦点検出装置の制御方法。 - 検出領域に対応する2像の位相差に基づいて当該検出領域における焦点ずれ量を検出する焦点検出装置の制御方法であって、
撮影レンズの異なる瞳領域を透過した対の光束をそれぞれ受光する複数の焦点検出用画素を有し、当該複数の焦点検出用画素から対の像の信号が出力される撮像素子から、該対の像の信号を読み出す読み出しステップと、
前記対の光束による対の像の像ズレ方向に対応して、前記検出領域の傾きを決定する決定ステップと、
前記決定ステップで傾きが決定された前記検出領域に対応する焦点検出用画素から得られる前記対の像の信号の位相差に基づいて、焦点ずれ量を検出する検出ステップと
を有することを特徴とする焦点検出装置の制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009244890A JP5489641B2 (ja) | 2008-11-11 | 2009-10-23 | 焦点検出装置及びその制御方法 |
| US13/126,839 US8576329B2 (en) | 2008-11-11 | 2009-11-09 | Focus detection apparatus and control method therefor |
| PCT/JP2009/069410 WO2010055931A1 (en) | 2008-11-11 | 2009-11-09 | Focus detection apparatus and control method therefor |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008289171 | 2008-11-11 | ||
| JP2008289171 | 2008-11-11 | ||
| JP2009244890A JP5489641B2 (ja) | 2008-11-11 | 2009-10-23 | 焦点検出装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010140013A JP2010140013A (ja) | 2010-06-24 |
| JP2010140013A5 JP2010140013A5 (ja) | 2012-12-06 |
| JP5489641B2 true JP5489641B2 (ja) | 2014-05-14 |
Family
ID=42170061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009244890A Expired - Fee Related JP5489641B2 (ja) | 2008-11-11 | 2009-10-23 | 焦点検出装置及びその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8576329B2 (ja) |
| JP (1) | JP5489641B2 (ja) |
| WO (1) | WO2010055931A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11909942B2 (en) | 2019-11-11 | 2024-02-20 | Canon Kabushiki Kaisha | Parallax detecting apparatus, image capturing apparatus, parallax detecting method, and storage medium |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5693082B2 (ja) * | 2010-08-09 | 2015-04-01 | キヤノン株式会社 | 撮像装置 |
| JP5513326B2 (ja) | 2010-09-07 | 2014-06-04 | キヤノン株式会社 | 撮像素子及び撮像装置 |
| JP5778931B2 (ja) * | 2011-01-25 | 2015-09-16 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| US8742309B2 (en) | 2011-01-28 | 2014-06-03 | Aptina Imaging Corporation | Imagers with depth sensing capabilities |
| JP6000520B2 (ja) | 2011-07-25 | 2016-09-28 | キヤノン株式会社 | 撮像装置およびその制御方法およびプログラム |
| US10015471B2 (en) * | 2011-08-12 | 2018-07-03 | Semiconductor Components Industries, Llc | Asymmetric angular response pixels for single sensor stereo |
| JP5888914B2 (ja) * | 2011-09-22 | 2016-03-22 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| EP2762941B1 (en) * | 2011-09-30 | 2016-12-28 | Fujifilm Corporation | Imaging device and focus parameter value calculation method |
| US9554115B2 (en) * | 2012-02-27 | 2017-01-24 | Semiconductor Components Industries, Llc | Imaging pixels with depth sensing capabilities |
| WO2013128581A1 (ja) * | 2012-02-28 | 2013-09-06 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の駆動方法 |
| JP5942697B2 (ja) | 2012-08-21 | 2016-06-29 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP6094588B2 (ja) * | 2012-09-11 | 2017-03-15 | ソニー株式会社 | 撮像制御装置、撮像装置、および、撮像制御装置の制御方法 |
| JP5635584B2 (ja) * | 2012-12-20 | 2014-12-03 | オリンパスイメージング株式会社 | 撮影機器、カメラシステム及びフォーカス制御のための情報を算出する方法 |
| JP6366251B2 (ja) * | 2013-01-07 | 2018-08-01 | キヤノン株式会社 | 撮像装置および撮像装置の制御方法 |
| EP2944997A4 (en) * | 2013-01-10 | 2016-12-21 | Olympus Corp | IMAGE CAPTURE DEVICE, IMAGE CORRECTION METHOD, IMAGE PROCESSING DEVICE, AND IMAGE PROCESSING METHOD |
| JP6045362B2 (ja) * | 2013-01-17 | 2016-12-14 | オリンパス株式会社 | 撮像装置および焦点検出方法 |
| CN109348148B (zh) * | 2013-02-27 | 2022-03-15 | 株式会社尼康 | 成像元件及电子设备 |
| JP6172978B2 (ja) * | 2013-03-11 | 2017-08-02 | キヤノン株式会社 | 撮像装置、撮像システム、信号処理装置、プログラム、および、記憶媒体 |
| JP6116301B2 (ja) | 2013-03-21 | 2017-04-19 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP2014186227A (ja) * | 2013-03-25 | 2014-10-02 | Canon Inc | 撮像装置、その制御方法、および制御プログラム |
| JP6317548B2 (ja) | 2013-04-10 | 2018-04-25 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP6338442B2 (ja) * | 2013-07-11 | 2018-06-06 | キヤノン株式会社 | 固体撮像素子、測距装置、および撮像装置 |
| JP6372983B2 (ja) * | 2013-09-02 | 2018-08-15 | キヤノン株式会社 | 焦点検出装置およびその制御方法、撮像装置 |
| JP6210824B2 (ja) * | 2013-10-02 | 2017-10-11 | オリンパス株式会社 | 焦点調節装置および焦点調節方法 |
| TW201514599A (zh) * | 2013-10-07 | 2015-04-16 | Novatek Microelectronics Corp | 影像感測器及影像擷取系統 |
| JP6214322B2 (ja) * | 2013-10-15 | 2017-10-18 | キヤノン株式会社 | 距離検出装置、撮像装置および距離検出方法 |
| JP2015129846A (ja) * | 2014-01-07 | 2015-07-16 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6249825B2 (ja) * | 2014-03-05 | 2017-12-20 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| JP6381266B2 (ja) * | 2014-04-15 | 2018-08-29 | キヤノン株式会社 | 撮像装置、制御装置、制御方法、プログラム、および、記憶媒体 |
| JP2015228466A (ja) | 2014-06-02 | 2015-12-17 | キヤノン株式会社 | 撮像装置及び撮像システム |
| JP6403461B2 (ja) * | 2014-07-01 | 2018-10-10 | キヤノン株式会社 | 撮像装置及びその駆動方法 |
| JP6530593B2 (ja) * | 2014-08-11 | 2019-06-12 | キヤノン株式会社 | 撮像装置及びその制御方法、記憶媒体 |
| JP2016058877A (ja) * | 2014-09-09 | 2016-04-21 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP2016192467A (ja) * | 2015-03-31 | 2016-11-10 | ルネサスエレクトロニクス株式会社 | 半導体装置 |
| JP6412826B2 (ja) * | 2015-06-04 | 2018-10-24 | オリンパス株式会社 | 撮像装置 |
| JP6412468B2 (ja) * | 2015-06-25 | 2018-10-24 | オリンパス株式会社 | 撮像装置および撮像方法 |
| US10999543B2 (en) | 2016-06-28 | 2021-05-04 | Sony Corporation | Solid-state imaging device, electronic apparatus, lens control method, and vehicle |
| CN106506969B (zh) | 2016-11-29 | 2019-07-19 | Oppo广东移动通信有限公司 | 摄像模组、通过其进行人像追踪的方法以及电子设备 |
| JP7250428B2 (ja) * | 2018-03-22 | 2023-04-03 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP2019061264A (ja) * | 2018-11-29 | 2019-04-18 | 株式会社ニコン | 焦点検出装置、カメラ、及び電子機器 |
| JP2021193412A (ja) * | 2020-06-08 | 2021-12-23 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co., Ltd | 装置、撮像装置、撮像システム、移動体 |
| JP2020166297A (ja) * | 2020-06-29 | 2020-10-08 | 株式会社ニコン | 焦点検出装置、カメラ、及び電子機器 |
| CN115509007B (zh) * | 2021-06-23 | 2025-09-05 | 宏碁股份有限公司 | 增强现实显示设备与方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2886865B2 (ja) * | 1988-05-16 | 1999-04-26 | キヤノン株式会社 | 焦点調節状態検出装置 |
| JPH10164413A (ja) * | 1996-12-02 | 1998-06-19 | Nikon Corp | 撮像装置 |
| JPH11223761A (ja) * | 1998-02-09 | 1999-08-17 | Nikon Corp | 焦点検出装置付きカメラ |
| JP3592147B2 (ja) * | 1998-08-20 | 2004-11-24 | キヤノン株式会社 | 固体撮像装置 |
| JP4228093B2 (ja) * | 1998-11-27 | 2009-02-25 | 株式会社ニコン | 焦点検出装置 |
| JP4908668B2 (ja) * | 2000-04-19 | 2012-04-04 | キヤノン株式会社 | 焦点検出装置 |
| JP2004191629A (ja) | 2002-12-11 | 2004-07-08 | Canon Inc | 焦点検出装置 |
| JP4935078B2 (ja) * | 2006-01-10 | 2012-05-23 | 株式会社ニコン | 固体撮像素子及びこれを用いた電子カメラ |
| JP4931226B2 (ja) * | 2006-05-02 | 2012-05-16 | キヤノン株式会社 | 焦点検出装置及び光学機器 |
| JP4867566B2 (ja) * | 2006-10-18 | 2012-02-01 | 株式会社ニコン | 撮像素子、焦点検出装置および撮像装置 |
| JP2008209761A (ja) * | 2007-02-27 | 2008-09-11 | Nikon Corp | 焦点検出装置および撮像装置 |
| JP5458475B2 (ja) * | 2007-04-18 | 2014-04-02 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5211590B2 (ja) * | 2007-09-10 | 2013-06-12 | 株式会社ニコン | 撮像素子および焦点検出装置 |
| JP5092685B2 (ja) * | 2007-10-23 | 2012-12-05 | 株式会社ニコン | 撮像素子および撮像装置 |
| US8223256B2 (en) * | 2008-04-11 | 2012-07-17 | Nikon Corporation | Correlation calculation method, correlation calculation device, focus detection device and image-capturing apparatus |
| JP5276374B2 (ja) * | 2008-07-25 | 2013-08-28 | キヤノン株式会社 | 焦点検出装置 |
-
2009
- 2009-10-23 JP JP2009244890A patent/JP5489641B2/ja not_active Expired - Fee Related
- 2009-11-09 US US13/126,839 patent/US8576329B2/en not_active Expired - Fee Related
- 2009-11-09 WO PCT/JP2009/069410 patent/WO2010055931A1/en not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11909942B2 (en) | 2019-11-11 | 2024-02-20 | Canon Kabushiki Kaisha | Parallax detecting apparatus, image capturing apparatus, parallax detecting method, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110199506A1 (en) | 2011-08-18 |
| JP2010140013A (ja) | 2010-06-24 |
| US8576329B2 (en) | 2013-11-05 |
| WO2010055931A1 (en) | 2010-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5489641B2 (ja) | 焦点検出装置及びその制御方法 | |
| KR101310105B1 (ko) | 초점 검출장치 | |
| US8310590B2 (en) | Image sensor and image-capturing device with image-capturing and focus detection pixels | |
| KR101215965B1 (ko) | 촬상장치 | |
| US8164642B2 (en) | Image-capturing device with a destructive read-type image sensor | |
| US8654227B2 (en) | Focus detection apparatus, focus detection method, and image sensing apparatus | |
| US8063978B2 (en) | Image pickup device, focus detection device, image pickup apparatus, method for manufacturing image pickup device, method for manufacturing focus detection device, and method for manufacturing image pickup apparatus | |
| JP5092685B2 (ja) | 撮像素子および撮像装置 | |
| US8159599B2 (en) | Focus detection apparatus, focus detection method, and image sensing apparatus | |
| JP5455397B2 (ja) | 光学機器 | |
| JP5159700B2 (ja) | 光学装置及び焦点検出方法 | |
| US8493497B2 (en) | Focus detection apparatus with weighting of pixel outputs | |
| US8902349B2 (en) | Image pickup apparatus | |
| JP2009003122A (ja) | 撮像装置及びその制御方法 | |
| JP5167783B2 (ja) | 焦点検出装置および撮像装置 | |
| JP2014165778A (ja) | 固体撮像素子、撮像装置及び焦点検出装置 | |
| JP2012220790A (ja) | 撮像装置 | |
| JP5735784B2 (ja) | 撮像装置及びその制御方法、レンズ装置及びその制御方法 | |
| JP2011227388A (ja) | 撮像装置 | |
| JP6671868B2 (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP2010039106A (ja) | 撮像素子、焦点検出装置および撮像装置 | |
| JP6254780B2 (ja) | 焦点検出装置及び方法、及び撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121023 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140225 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5489641 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |