JP5448367B2 - ルート決定方法およびデバイス - Google Patents
ルート決定方法およびデバイス Download PDFInfo
- Publication number
- JP5448367B2 JP5448367B2 JP2008119334A JP2008119334A JP5448367B2 JP 5448367 B2 JP5448367 B2 JP 5448367B2 JP 2008119334 A JP2008119334 A JP 2008119334A JP 2008119334 A JP2008119334 A JP 2008119334A JP 5448367 B2 JP5448367 B2 JP 5448367B2
- Authority
- JP
- Japan
- Prior art keywords
- graph
- route
- cost
- evaluation function
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title abstract description 113
- 238000011156 evaluation Methods 0.000 claims description 238
- 239000000284 extract Substances 0.000 claims description 3
- 230000006870 function Effects 0.000 description 225
- 230000008859 change Effects 0.000 description 15
- 238000012544 monitoring process Methods 0.000 description 11
- 230000009977 dual effect Effects 0.000 description 10
- 230000008569 process Effects 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 238000013500 data storage Methods 0.000 description 4
- 230000007704 transition Effects 0.000 description 3
- 101100083446 Danio rerio plekhh1 gene Proteins 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000010845 search algorithm Methods 0.000 description 2
- 230000003936 working memory Effects 0.000 description 2
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3446—Details of route searching algorithms, e.g. Dijkstra, A*, arc-flags, using precalculated routes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/096844—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the complete route is dynamically recomputed based on new data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096855—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver
- G08G1/096866—Systems involving transmission of navigation instructions to the vehicle where the output is provided in a suitable form to the driver where the complete route is shown to the driver
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
- Radar Systems Or Details Thereof (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Electrotherapy Devices (AREA)
Description
グラフ上で最適なルートまたは良いルートを見つけるためのいくつかの標準的なアルゴリズムが、当該技術分野において公知であり、それらのうちで最も有名なものは、DijkstraアルゴリズムおよびA*−アルゴリズムである。
目的地、特に道路網上の目的地(22;82;132)までのルートを決定するための方法であって、
第1のステップにおいて、第1のグラフ(20)に基づいて、複数の頂点(23、24、25、27、28、32、33)に対する評価関数の値を決定することであって、頂点(21〜33)に対する評価関数の値は、該頂点(21〜33)から該目的地(22;82;132)までのルートに関連するコストの下限を表現している、ことと、
第2のステップにおいて、該第1のステップにおいて決定された該評価関数の値に基づいて、第2のグラフ(20;20’)上で、出発点(21;81;131)から該目的地(22;82;132)までのルート(61)を検索することと
を包含する、方法。
上記第1のステップにおいて、頂点(21〜33)に対する評価関数の値を決定することは、上記第1のグラフ(20)上で該頂点(21〜33)から上記目的地(22;82;132)までのルートを検索することを含む、項目1に記載の方法。
上記頂点(21〜33)から上記目的地(22)までの上記ルートを検索することは、上記第1のグラフ(20)上でDijkstraアルゴリズムまたはA*−アルゴリズムを用いて実行される、項目2に記載の方法。
上記第1のステップにおいて頂点(21〜33)に対する評価関数の値を決定することは、上記第1のグラフ上で、上記目的地(22;82;132)から出発して上記出発点(21;81;131)まで延長するルート検索を実行することを含む、項目1〜項目3のいずれか一項に記載の方法。
上記第2のステップにおいて、上記評価関数の値に基づいて、上記目的地(22;82;132)までのルート(61)とは異なる少なくとも1つのさらなるルート(121;151)を検索すること
を含む、項目1〜項目4のいずれか一項に記載の方法。
上記少なくとも1つのさらなるルート(121;151)は、上記出発点(21)から上記目的地(22)までの代替ルート(121;151)、または別の出発点(135)から上記目的地(132)までのルートのうちの少なくとも1つを含む、項目5に記載の方法。
上記出発点(21;131)から上記目的地(22;132)までの上記ルート(61)に対する現在の位置(135)をモニタリングすることであって、上記少なくとも1つのさらなるルートの上記検索は、該現在の位置(135)の該モニタリングの結果に基づいて自動的に開始される、こと
を含む、項目5または項目6に記載の方法。
上記第2のグラフ(20;20’)の頂点(21〜33;171〜178)および/またはエッジ(41〜45;181〜185)に関連するコストの変化をモニタリングすることであって、上記少なくとも1つのさらなるルート(121;151)の上記検索は、該変化をモニタリングした結果に基づいて自動的に開始される、こと
を含む、項目5〜項目7のいずれか一項に記載の方法。
上記第1のステップにおいて決定された上記評価関数の値の少なくともサブセット(5)を格納することと、
上記第2のステップにおいて該サブセット(5)の少なくとも1つの評価関数の値を抽出することと
を含む、項目1〜項目8のいずれか一項に記載の方法。
上記第1のステップにおける上記評価関数の値の上記決定は、第1のコストモデルに基づいており、上記第2のステップにおける上記出発点(21;81;131)から上記目的地(22;82;132)までの上記ルート(61)の検索は、第2のコストモデルに基づいている、項目1〜項目9のいずれか一項に記載の方法。
上記第1のコストモデルにしたがう、上記第1のグラフ(20)の上記頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは、時間に関係しない、項目10に記載の方法。
上記第2のコストモデルにしたがう、上記第2のグラフ(20;20’)の頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストは可変である、項目10または項目11に記載の方法。
ユーザの選好度、交通情報信号、時刻または日付のうちの少なくとも1つに基づいて、上記第2のコストモデルにしたがう上記コストを調整すること
を含む、項目12に記載の方法。
上記調整することは、少なくとも1つの頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に対し、上記第1のコストモデルに対して
上記第2のコストモデルにしたがうコストを増加させることを含む、項目13に記載の方法。
上記第1のコストモデルにしたがう上記第1のグラフ(20)の頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは、上記第2のコストモデルにしたがう対応する頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストの下限を表現する、項目12〜項目14のいずれか一項に記載の方法。
上記第1のグラフ(20)は、該第1のグラフ(20)上のルート検索が、平均で、該第2のグラフ(20’)上のルート検索よりも速くなるように定義される、項目1〜項目15のいずれか一項に記載の方法。
上記第1のグラフ(20)は、上記第2のグラフ(20’)よりも少ない頂点(21〜33)を有している、項目1〜項目16のいずれか一項に記載の方法。
上記第1のグラフの頂点は、上記道路網の道路セグメントを表現しており、上記第1のステップにおいて、該道路網上のターン制限は無視される、項目1〜項目17のいずれか一項に記載の方法。
上記第1のステップにおいて、一方通行制限が考慮される、項目18に記載の方法。
上記第1のグラフ(20)のエッジ(41〜55)は、道路網の道路セグメントを表現しており、上記第2のグラフ(20’)の頂点(171〜178)は、該道路網の道路セグメントを表現している、項目1〜項目17のいずれか一項に記載の方法。
上記第1のグラフ(20)は、上記第2のグラフ(20’)の双対グラフによって構成される、項目20に記載の方法。
上記第1のグラフ(20)は、上記第2のグラフ(20)と同じものである、項目1〜項目15のいずれか一項に記載の方法。
上記第1のステップは、第3のグラフ(20”)を定義すること、該第3のグラフ(20”)上でルート検索を実行すること、および該第3のグラフ(20”)上での該ルート検索の結果を利用して、上記複数の頂点(23、24、25、27、28、32、33)に対する評価関数を決定することを含む、項目1〜項目22のいずれか一項に記載の方法。
上記第1のステップにおいて頂点(23、24、25、27、28、32、33)に対する評価関数の値を決定することは、上記第1のグラフ(20)上で予め計算された情報に基づいて、該第1のグラフ(20)上で該頂点(23、24、25、27、28、32、33)から上記目的地(22)までのルートを検索することを含む、項目1〜項目23のいずれか一項に記載の方法。
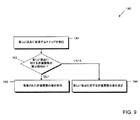
上記第2のステップにおいて上記ルート(61)を検索することは、上記第1のステップにおいて所与の頂点(29)に対する評価関数の値が決定されたかどうかを決定することを含み、該第1のステップにおいて評価関数の値が決定されていない場合には、該所与の頂点(29)に対する評価関数の値を決定することを含む、項目1〜項目24のいずれか一項に記載の方法。
上記第1のグラフ(20)および上記第2のグラフ(20;20’)は、道路網、コンピュータネットワーク、またはインフラストラクチャネットワークのうちの1つを表現する、項目1〜項目25のいずれか一項に記載の方法。
上記方法は、車両上のナビゲーションシステム(1)によって実行される、項目1〜項目26のいずれか一項に記載の方法。
目的地、特に道路網上の目的地(22;82;132)までのルートを決定するためのデバイスであって、
グラフデータ(4)を格納する格納ユニット(3)であって、該グラフデータ(4)は、第1のグラフ(20)および第2のグラフ(20;20’)のうちの少なくとも1つの頂点(21〜33)およびエッジ(41〜55)を定義する、格納ユニット(3)と、
該格納ユニット(3)に接続されたプロセッサ(2)であって、該プロセッサ(2)は、該グラフデータ(4)を抽出し、該プロセッサは、第1のステップにおいて、該第1のグラフ(20)に基づいて、複数の頂点(23、24、25,27、28,32、33)に対する評価関数の値を決定し、頂点(21〜33)に対する評価関数の値は、該頂点(21〜33)から該目的地(22;82;132)までのルートに関連するコストの下限を表現しており、該プロセッサは、第2のステップにおいて、該第1のステップにおいて決定された該評価関数の値に基づいて、第2のグラフ(20;20’)上で、出発点(21;81;131)から該目的地(22;82;132)までのルート検索を実行する、プロセッサ(2)と
を備えている、デバイス。
上記プロセッサ(2)は、上記第1のグラフ(20)上でルート検索を実行し、上記評価関数の値を決定する、項目28に記載のデバイス。
上記プロセッサ(2)は、上記目的地(22;82;132)から出発して上記出発点(21;81;131)まで延長するルート検索を実行し、上記評価関数の値を決定する、項目28または項目29に記載のデバイス。
上記第2のステップにおいて、上記プロセッサ(2)は、上記第1のステップにおいて決定された上記評価関数の値に基づいて、上記目的地(22;82;132)までの少なくとも1つのさらなるルート検索を実行する、項目28〜項目30のいずれか一項に記載のデバイス。
さらなる格納ユニット(3)を含み、上記プロセッサ(2)は、該さらなる格納ユニット(3)に接続されており、上記第1のステップにおいて決定された上記評価関数の値(5)を該さらなる格納ユニット(3)に格納し、上記第2のステップを実行するために該さらなる格納ユニット(3)から該評価関数の値(5)を抽出する、項目28〜項目31のいずれか一項に記載のデバイス。
上記プロセッサ(2)は、第1のコストモデルに基づいて、上記第1のステップにおいて上記評価関数の値を決定し、第2のコストモデルに基づいて、上記第2のステップにおいて上記出発点(21;81;131)から上記目的地(22;82;132)までのルート検索を実行する、項目28〜項目32のいずれか一項に記載のデバイス。
上記第1のコストモデルにしたがう、上記第1のグラフ(20)の上記頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは時間に関係せず、上記第2のコストモデルにしたがう、上記第2のグラフ(20;20’)の頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストは可変である、項目33に記載のデバイス。
上記第1のコストモデルにしたがう、上記第1のグラフ(20)の上記頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは、上記第2のコストモデルにしたがう、上記第2のグラフ(20;20’)の対応する頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストの下限を表現する、項目33または項目34に記載のデバイス。
ユーザ入力を受信する入力ユニット(6)を含み、上記プロセッサ(2)は、該入力ユニット(6)に接続されており、該ユーザ入力に基づいて、上記第2のコストモデルのコストを調整する、項目33〜項目35のいずれか一項に記載のデバイス。
時刻および/または日付を決定するクロックユニット(10)を含み、上記プロセッサ(2)は、該クロックユニット(10)に接続されており、該時刻および/または日付に基づいて、上記第2のコストモデルのコストを調整する、項目33〜項目36のいずれか一項に記載の方法。
交通情報信号を受信する交通メッセージ受信器(9)を含み、上記プロセッサ(2)は、該交通メッセージ受信器(9)に接続されており、該交通情報信号に基づいて、上記第2のコストモデルのコストを調整する、項目33〜項目37のいずれか一項に記載の方法。
上記プロセッサ(2)は、少なくとも1つの頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に対し、上記第1のコストモデルに対して上記第2のコストモデルのコストを増加させ、該第2のコストモデルのコストを調整する、項目36〜項目38のいずれか一項に記載のデバイス。
現在の車両の位置(135)を決定する位置決定手段(8)を含み、上記プロセッサ(2)は、該位置決定手段(8)に接続されており、該現在の車両の位置(135)を上記出発点(21;81;131)から上記目的地(22;82;132)までの上記ルート(61)と比較し、該比較の結果に基づいて、上記第2のグラフ(20;20’)上での該現在の車両の位置(135)から該目的地(132)までのさらなるルート検索を実行する、項目28〜項目39のいずれか一項に記載のデバイス。
上記第1のグラフ(20)は、該第1のグラフ(20)上のルート検索が、平均で、該第2のグラフ(20’)上のルート検索よりも速くなるように定義される、項目28〜項目40のいずれか一項に記載のデバイス。
上記プロセッサ(2)は、項目1〜項目27のいずれか一項に記載の方法を実行するように構成されている、項目28〜項目41のいずれか一項に記載のデバイス。
ルートを決定する項目28〜項目42のいずれか一項に記載のデバイスと、
該ルート上の情報を出力する出力ユニット(7)と
を含む、ナビゲーションシステム。
データ格納媒体であって、該データ格納媒体上に命令を有しており、該命令は、ナビゲーションシステム(1)のプロセッサ(2)によって実行されたときに、該ナビゲーションシステム(1)に、項目1〜項目27のいずれか一項に記載の方法を実行するように命令する、データ格納媒体。
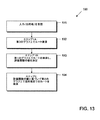
目的地(特に、道路網上の目的地)までのルートを決定するための方法およびデバイスが提供される。この方法は、ステップ(72)において、第1のグラフに基づいて複数の頂点に対する評価関数の値を決定し、頂点から目的地までのルートに関連するコストの下限を表現する頂点に対する評価関数の値を決定することと、第2のステップ(73)において、第1のステップ(72)において決定された評価関数の値に基づいて、第2のグラフ上で出発点から目的地までのルートを検索することとを含む。
本明細書において以後、本発明の実施形態が、図面を参照して説明される。以下の記載は、本発明をより良く説明する目的のためにのみ与えられ、限定的な意味で解釈されるべきではないことが理解されるべきである。特に断りがない限り、以下に記載される様々な実施形態の特徴は、互いに組み合わされ得るということもまた、理解されるべきである。

3 格納ユニット
4 グラフデータ
5 データ
6 入力ユニット
7 出力ユニット
8 位置決定手段
9 交通メッセージ受信器
10 クロックユニット
20 第1のグラフ
20,20’ 第2のグラフ
22、82、132 目的地
21、81、131 出発点
61 ルート
Claims (16)
- 目的地(22;82;132)までのルートを決定するためのデバイスであって、
グラフデータ(4)を格納する格納ユニット(3)であって、該グラフデータ(4)は、第1のグラフ(20)および第2のグラフ(20;20’)のうちの少なくとも1つの頂点(21〜33)およびエッジ(41〜55)を定義する、格納ユニット(3)と、
該格納ユニット(3)に接続されたプロセッサ(2)であって、該プロセッサ(2)は、該グラフデータ(4)を抽出し、
該プロセッサは、
第1のステップにおいて、第1の領域を有する該第1のグラフ(20)に基づいて、複数の頂点(23、24、25,27、28,32、33)に対する評価関数の値を決定することであって、頂点(21〜33)に対する評価関数の値は、該頂点(21〜33)から該目的地(22;82;132)までのルートに関連するコストの下限を表現しており、該第1のステップにおいて自身に対する該評価関数の値が決定される該複数の頂点は、該第1の領域内に存在し、かつ第1の基準またはアルゴリズムに基づいて決定される、ことと、
第2のステップにおいて、該第1のステップにおいて決定された該評価関数の値に基づいて、該第1の領域と少なくとも部分的に重複する第2の領域を有する第2のグラフ(20;20’)上で、出発点(21;81;131)から該目的地(22;82;132)までのルート検索を実行することと
を行う、プロセッサ(2)と
を備え、
該第1の領域および該第2の領域の重複部分内の該第2のグラフの頂点(21〜33;171〜174;177、178)は、該第1のグラフの頂点(21〜33)またはエッジ(41〜55)に対応し、該第2のステップにおいて自身に対する評価関数の値が必要とされる該第2のグラフの該頂点は、該第1の基準またはアルゴリズムとは異なる第2の基準またはアルゴリズムによって決定され、
該プロセッサは、該第2のステップにおいて該ルート検索を行うときに、該第1のステップにおいて該第2のグラフの該頂点のうちの所与の頂点(29)に対する評価関数の値が決定されたかどうかを決定し、該第1のステップにおいて評価関数の値が決定されていない場合には、該所与の頂点(29)に対する評価関数の値を決定する、デバイス。 - 前記プロセッサ(2)は、前記第1のグラフ(20)上でルート検索を実行し、前記評価関数の値を決定する、請求項1に記載のデバイス。
- 前記プロセッサ(2)は、前記目的地(22;82;132)から出発して前記出発点(21;81;131)まで延長するルート検索を実行し、前記評価関数の値を決定する、請求項1または請求項2に記載のデバイス。
- 前記第2のステップにおいて、前記プロセッサ(2)は、前記第1のステップにおいて決定された前記評価関数の値に基づいて、前記目的地(22;82;132)までの少なくとも1つのさらなるルート検索を実行する、請求項1〜請求項3のいずれか一項に記載のデバイス。
- さらなる格納ユニット(3)を含み、前記プロセッサ(2)は、該さらなる格納ユニット(3)に接続されており、前記第1のステップにおいて決定された前記評価関数の値(5)を該さらなる格納ユニット(3)に格納し、前記第2のステップを実行するために該さらなる格納ユニット(3)から該評価関数の値(5)を抽出する、請求項1〜請求項4のいずれか一項に記載のデバイス。
- 前記プロセッサ(2)は、第1のコストモデルに基づいて、前記第1のステップにおいて前記評価関数の値を決定し、第2のコストモデルに基づいて、前記第2のステップにおいて前記出発点(21;81;131)から前記目的地(22;82;132)までのルート検索を実行する、請求項1〜請求項5のいずれか一項に記載のデバイス。
- 前記第1のコストモデルにしたがう、前記第1のグラフ(20)の前記頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは時間に関係せず、前記第2のコストモデルにしたがう、前記第2のグラフ(20;20’)の頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストは可変である、請求項6に記載のデバイス。
- 前記第1のコストモデルにしたがう、前記第1のグラフ(20)の前記頂点(21〜33)および/またはエッジ(41〜55)に関連するコストは、前記第2のコストモデルにしたがう、前記第2のグラフ(20;20’)の対応する頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に関連するコストの下限を表現する、請求項6または請求項7に記載のデバイス。
- ユーザ入力を受信する入力ユニット(6)を含み、前記プロセッサ(2)は、該入力ユニット(6)に接続されており、該ユーザ入力に基づいて、前記第2のコストモデルのコストを調整する、請求項6〜請求項8のいずれか一項に記載のデバイス。
- 時刻および/または日付を決定するクロックユニット(10)を含み、前記プロセッサ(2)は、該クロックユニット(10)に接続されており、該時刻および/または日付に基づいて、前記第2のコストモデルのコストを調整する、請求項6〜請求項9のいずれか一項に記載のデバイス。
- 交通情報信号を受信する交通メッセージ受信器(9)を含み、前記プロセッサ(2)は、該交通メッセージ受信器(9)に接続されており、該交通情報信号に基づいて、前記第2のコストモデルのコストを調整する、請求項6〜請求項10のいずれか一項に記載のデバイス。
- 前記プロセッサ(2)は、少なくとも1つの頂点(21〜33;171〜178)および/またはエッジ(41〜55;181〜185)に対し、前記第1のコストモデルに対して前記第2のコストモデルのコストを増加させ、該第2のコストモデルのコストを調整する、請求項9〜請求項11のいずれか一項に記載のデバイス。
- 現在の車両の位置(135)を決定する位置決定手段(8)を含み、前記プロセッサ(2)は、該位置決定手段(8)に接続されており、該現在の車両の位置(135)を前記出発点(21;81;131)から前記目的地(22;82;132)までの前記ルート(61)と比較し、該比較の結果に基づいて、前記第2のグラフ(20;20’)上での該現在の車両の位置(135)から該目的地(132)までのさらなるルート検索を実行する、請求項1〜請求項12のいずれか一項に記載のデバイス。
- 前記第1のグラフ(20)は、該第1のグラフ(20)上のルート検索が、平均で、該第2のグラフ(20’)上のルート検索よりも速くなるように定義される、請求項1〜請求項13のいずれか一項に記載のデバイス。
- 前記決定されたルートは道路網上にある、請求項1〜14のいずれか一項に記載のデバイス。
- ルートを決定する請求項1〜請求項15のいずれか一項に記載のデバイスと、
該ルート上の情報を出力する出力ユニット(7)と
を含む、ナビゲーションシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP07009032.9 | 2007-05-04 | ||
| EP20070009032 EP1988362B1 (en) | 2007-05-04 | 2007-05-04 | Route determination method and device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008275621A JP2008275621A (ja) | 2008-11-13 |
| JP2008275621A5 JP2008275621A5 (ja) | 2011-06-16 |
| JP5448367B2 true JP5448367B2 (ja) | 2014-03-19 |
Family
ID=38535633
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008119334A Active JP5448367B2 (ja) | 2007-05-04 | 2008-04-30 | ルート決定方法およびデバイス |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9129530B2 (ja) |
| EP (1) | EP1988362B1 (ja) |
| JP (1) | JP5448367B2 (ja) |
| AT (1) | ATE479075T1 (ja) |
| DE (1) | DE602007008690D1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100131184A1 (en) * | 2008-11-21 | 2010-05-27 | Richard Stanton | Method for creating suggested pathways for helping pedestrians cross open spaces |
| US8417414B2 (en) * | 2008-12-11 | 2013-04-09 | Infosys Technologies Limited | Method and system for managing passenger and vehicle safety |
| JP4873042B2 (ja) | 2009-04-13 | 2012-02-08 | トヨタ自動車株式会社 | 車両制御装置および車両制御方法 |
| US8581900B2 (en) | 2009-06-10 | 2013-11-12 | Microsoft Corporation | Computing transitions between captured driving runs |
| WO2012092519A1 (en) | 2010-12-30 | 2012-07-05 | Telenav, Inc. | Navigation system with constrained resource route planning optimizer and method of operation thereof |
| US8538677B2 (en) | 2010-12-30 | 2013-09-17 | Telenav, Inc. | Navigation system with constrained resource route planning mechanism and method of operation thereof |
| US20120265374A1 (en) * | 2011-04-15 | 2012-10-18 | Thomas Edward Yochum | Aircraft vertical trajectory optimization method |
| US20130101159A1 (en) * | 2011-10-21 | 2013-04-25 | Qualcomm Incorporated | Image and video based pedestrian traffic estimation |
| US8311741B1 (en) | 2011-11-04 | 2012-11-13 | Google Inc. | Method and system for generating travel routes based on wireless coverage |
| JP5925070B2 (ja) * | 2012-06-26 | 2016-05-25 | 株式会社デンソーアイティーラボラトリ | 地図更新システム、地図更新方法およびプログラム |
| JP2014215941A (ja) * | 2013-04-30 | 2014-11-17 | インターナショナル・ビジネス・マシーンズ・コーポレーションInternational Business Machines Corporation | 経路情報の処理方法、コンピュータ・プログラム及びコンピュータ。 |
| DE102013211602A1 (de) * | 2013-06-20 | 2014-12-24 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zum Ermitteln einer Route |
| GB201316013D0 (en) * | 2013-09-09 | 2013-10-23 | Tomtom Dev Germany Gmbh | Methods and systems for generating alternative routes |
| US9592828B2 (en) * | 2015-04-13 | 2017-03-14 | Nec Corporation | Long term driving danger prediction system |
| US11015948B2 (en) * | 2016-02-17 | 2021-05-25 | Mitsubishi Electric Corporation | Information provision device, information provision server, and information provision method |
| CN108009666B (zh) * | 2016-10-28 | 2020-04-10 | 武汉大学 | 基于动态路网的层级优先最优路径计算方法 |
| CN109961162B (zh) * | 2017-12-22 | 2023-04-07 | 株式会社日立制作所 | 路径规划方法和路径规划装置 |
| US11035681B2 (en) * | 2018-07-20 | 2021-06-15 | Verizon Patent And Licensing Inc. | Preserving original route information after recalculation of a route |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4176211B2 (ja) * | 1998-11-02 | 2008-11-05 | 文雄 溝口 | 時間制限付き経路探索方法 |
| US6643699B1 (en) * | 1999-03-10 | 2003-11-04 | International Business Machines Corporation | Computerized method for computing the overall splitting cost of a data structure using blocking island contour map of a network-level graph |
| US6477515B1 (en) | 1999-08-11 | 2002-11-05 | The United States Of America As Represented By The Secretary Of The Navy | Efficient computation of least cost paths with hard constraints |
| JP2002081952A (ja) * | 2000-09-11 | 2002-03-22 | Fumio Mizoguchi | ナビゲーションシステム |
| US6892133B2 (en) * | 2001-02-26 | 2005-05-10 | Alk Technologies, Inc. | Thin-client navigation and route guidance system |
| JP4400104B2 (ja) * | 2003-06-18 | 2010-01-20 | 株式会社エクォス・リサーチ | 最短時間経路探索方法 |
| US7467154B2 (en) * | 2005-06-29 | 2008-12-16 | Microsoft Corporation | Producing a locally optimal path through a lattice by overlapping search |
| US20070263590A1 (en) * | 2006-04-25 | 2007-11-15 | Microsoft Corporation | Optimization scheme for routing based on data latency |
| US7739040B2 (en) * | 2006-06-30 | 2010-06-15 | Microsoft Corporation | Computation of travel routes, durations, and plans over multiple contexts |
| GB2443472A (en) * | 2006-10-30 | 2008-05-07 | Cotares Ltd | Method of generating routes |
| US9009177B2 (en) * | 2009-09-25 | 2015-04-14 | Microsoft Corporation | Recommending points of interests in a region |
-
2007
- 2007-05-04 AT AT07009032T patent/ATE479075T1/de not_active IP Right Cessation
- 2007-05-04 DE DE200760008690 patent/DE602007008690D1/de active Active
- 2007-05-04 EP EP20070009032 patent/EP1988362B1/en active Active
-
2008
- 2008-04-30 JP JP2008119334A patent/JP5448367B2/ja active Active
- 2008-05-05 US US12/115,445 patent/US9129530B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9129530B2 (en) | 2015-09-08 |
| EP1988362A1 (en) | 2008-11-05 |
| JP2008275621A (ja) | 2008-11-13 |
| DE602007008690D1 (de) | 2010-10-07 |
| ATE479075T1 (de) | 2010-09-15 |
| EP1988362B1 (en) | 2010-08-25 |
| US20090276150A1 (en) | 2009-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5448367B2 (ja) | ルート決定方法およびデバイス | |
| JP4981395B2 (ja) | タイリングを用いた最適ルートの決定 | |
| JP6257313B2 (ja) | 道路網動的適応ヒエラルキーおよびルーティングのための方法およびシステム | |
| JP5661782B2 (ja) | Gps軌跡を用いた付加的マップ生成、改良および拡張 | |
| US10989553B2 (en) | Method, apparatus and computer program product for determining likelihood of a route | |
| JP5053705B2 (ja) | 推定関数を使用する最適ルート決定 | |
| JP3928962B2 (ja) | 通信型車両ナビゲーションシステムのサーバ装置及び車載端末装置 | |
| JP3078520B2 (ja) | 車両ナビゲーションシステムにおけるルート生成方法および装置 | |
| JP5906837B2 (ja) | 経路探索方法、経路探索装置、及びプログラム | |
| US20200249033A1 (en) | Method for producing alternative route suggestions | |
| WO2019057668A1 (en) | METHOD, APPARATUS AND COMPUTER PROGRAM PRODUCT FOR GENERATING A ROUTE USING TIME AND SPACE | |
| JP2021524018A (ja) | 駐車ルートを生成する方法およびシステム | |
| KR102523185B1 (ko) | 안전한 복귀 범위의 결정 방법 및 시스템 | |
| JP6912859B2 (ja) | 地図更新装置、地図更新方法、コンピュータプログラム及びコンピュータプログラムを記録した記録媒体 | |
| CN116465425A (zh) | 一种局部优化和双向计算的启发式路径规划方法 | |
| JP5349023B2 (ja) | ナビゲーション装置 | |
| CN114383617A (zh) | 基于地图神经网络导航算路方法、装置、设备及存储介质 | |
| JP6307270B2 (ja) | 経路探索装置 | |
| JP6859925B2 (ja) | 情報処理装置、情報提供システム、情報提供方法、及びプログラム | |
| JP2009156940A (ja) | 経路探索方法 | |
| JP4677767B2 (ja) | ナビゲーション装置及び情報提示方法 | |
| JP5875488B2 (ja) | 待ち合わせ支援装置およびナビゲーション装置 | |
| KR101262227B1 (ko) | 보행자 경로 안내 방법 및 장치 | |
| JP5737170B2 (ja) | 経路探索システム、方法およびプログラム | |
| JP2004012312A (ja) | 経路探索装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110428 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110428 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5448367 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |