JP5437147B2 - 回転角度検出装置 - Google Patents
回転角度検出装置 Download PDFInfo
- Publication number
- JP5437147B2 JP5437147B2 JP2010098731A JP2010098731A JP5437147B2 JP 5437147 B2 JP5437147 B2 JP 5437147B2 JP 2010098731 A JP2010098731 A JP 2010098731A JP 2010098731 A JP2010098731 A JP 2010098731A JP 5437147 B2 JP5437147 B2 JP 5437147B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- magnetic field
- magnetoelectric conversion
- detection device
- angle detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D9/00—Controlling engines by throttling air or fuel-and-air induction conduits or exhaust conduits
- F02D9/08—Throttle valves specially adapted therefor; Arrangements of such valves in conduits
- F02D9/10—Throttle valves specially adapted therefor; Arrangements of such valves in conduits having pivotally-mounted flaps
- F02D9/1035—Details of the valve housing
- F02D9/105—Details of the valve housing having a throttle position sensor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D9/00—Controlling engines by throttling air or fuel-and-air induction conduits or exhaust conduits
- F02D9/08—Throttle valves specially adapted therefor; Arrangements of such valves in conduits
- F02D9/10—Throttle valves specially adapted therefor; Arrangements of such valves in conduits having pivotally-mounted flaps
- F02D9/107—Manufacturing or mounting details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D11/00—Component parts of measuring arrangements not specially adapted for a specific variable
- G01D11/24—Housings ; Casings for instruments
- G01D11/245—Housings for sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W74/00—Encapsulations, e.g. protective coatings
- H10W74/01—Manufacture or treatment
- H10W74/016—Manufacture or treatment using moulds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/26—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor
- F02D41/28—Interface circuits
- F02D2041/281—Interface circuits between sensors and control unit
- F02D2041/285—Interface circuits between sensors and control unit the sensor having a signal processing unit external to the engine control unit
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D9/00—Controlling engines by throttling air or fuel-and-air induction conduits or exhaust conduits
- F02D9/08—Throttle valves specially adapted therefor; Arrangements of such valves in conduits
- F02D9/10—Throttle valves specially adapted therefor; Arrangements of such valves in conduits having pivotally-mounted flaps
- F02D9/1065—Mechanical control linkage between an actuator and the flap, e.g. including levers, gears, springs, clutches, limit stops of the like
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10W—GENERIC PACKAGES, INTERCONNECTIONS, CONNECTORS OR OTHER CONSTRUCTIONAL DETAILS OF DEVICES COVERED BY CLASS H10
- H10W74/00—Encapsulations, e.g. protective coatings
- H10W74/10—Encapsulations, e.g. protective coatings characterised by their shape or disposition
- H10W74/111—Encapsulations, e.g. protective coatings characterised by their shape or disposition the semiconductor body being completely enclosed
- H10W74/114—Encapsulations, e.g. protective coatings characterised by their shape or disposition the semiconductor body being completely enclosed by a substrate and the encapsulations
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
ここで、図15(A)〜(C)にて従来の回転角度検出装置140の外観及び断面の例を示し、図16(A)及び(B)にて従来の回転角度検出装置140を樹脂成形する製造方法の例を示す。
まず図15(A)〜(C)を用いて、従来の回転角度検出装置140の外観及び内部構造等について説明する。
図15(A)は従来の回転角度検出装置140の外観を示す斜視図であり、図15(B)は当該回転角度検出装置140の外観を示す正面図であり、図15(C)は当該回転角度検出装置140の内部構造を示す断面図である。
従来の回転角度検出装置140は、略円柱状の樹脂モールド部152の底面から複数の端子49が突出した形状を有している。そして樹脂モールド部152の内部には、磁気の変化を検出する磁気検出部145と、磁気検出部145からの検出信号を回転角度信号に変換する信号演算部147と、磁気検出部145と信号演算部147とを接続する導電体のリード146と、端子側リード148を介して信号演算部147に接続される端子49と、を有する磁電変換IC144が2個配置されている。
この回転角度検出装置140は、スロットルバルブと一体となって回転軸ZS回りに回転するスロットルギヤ(図5(A)のスロットルギヤ22と類似した形状である)の回転角度を検出するために、磁気検出部145を回転軸ZSに対して垂直に配置する必要があるため、信号演算部147に対して磁気検出部145がほぼ直角となるようにリード146をL字形状に湾曲させている。
またスロットルギヤに形成された比較的小さな磁場空間内に磁気検出部145を配置する必要があるため、径D100が、より小さくなるように形成されている。
樹脂モールド部152となる凹状空洞部163が形成された下金型162に、リード146をL字形状に曲げた磁電変換IC144を2個挿入して位置決めし、その上から凸状の支持型165を有する上金型160で蓋をした後、凹状空洞部163を樹脂で充填して冷却後、上金型160を抜き取って樹脂成形する。
磁電変換IC144の磁気検出部には凸状の位置決め部145c(図6(A)〜(C)に示す位置決め部45cと類似した形状である)が形成されており、この位置決め部145cを、凹状空洞部163の奥に形成されている位置決め溝166a〜166cに合致させて、磁気検出部145の位置決めを行っている。
また特許文献2に記載された従来技術には、磁電変換ICのリードをL字形状に曲げて信号演算部に対して磁場検出部を直角に設定し、金型に形成した凹状の空洞部に2個の磁電変換ICを位置決めして配置して樹脂成形した回転角度検出装置が開示されている。
また特許文献3に記載された従来技術には、磁電変換ICのリードをL字形状に曲げて信号演算部に対して磁場検出部を直角に設定し、ホルダに2個の磁電変換ICを固定して樹脂成形した回転検出センサが開示されている。
ところが、特許文献1〜特許文献3、及び図15〜図16に記載された従来技術では、樹脂成形した回転角度検出装置の径を、これ以上小さくしようとしても、磁電変換ICの寸法、及びリードをL字形状に曲げて信号演算部に対して磁場検出部を直角となる位置に設定した形状の寸法にて限界が決まってしまい、これ以上径を小さくすることは非常に困難である。
また、回転角度検出装置を樹脂モールドする場合については、特許文献1に記載された従来技術では、樹脂ホルダの面に磁電変換ICの磁場検出部の底面を載置するだけであり、位置決め精度が甘い。
また特許文献3に記載された従来技術では、磁場検出部を直接的に位置決めしていないので位置決め精度が甘い。
また特許文献2及び図15〜図16に記載された従来技術では、磁場検出部の位置決め部145cを用いて磁場検出部の位置決めをしているので、位置決め精度は良いが、磁電変換ICは長さが20[mm]程度の大きさであり、作業者は下金型の凹状の空洞部の奥に形成されている位置決め溝(小さな穴の奥にある小さな位置決め溝であり、更に薄暗くて見にくい個所)に、この位置決め部145cを合わせる必要があるので、作業性が良くない。
まず、本発明の第1の発明は、界磁部材を有して所定の回転軸回りに回転する回転部材との相対的な回転にともなう前記回転軸に直交する磁気の変化を検出する略平板形状の磁場検出部と、当該磁場検出部からの検出信号を処理して磁気の変化に応じた回転角度信号を出力する略平板形状の信号演算部と、を有するとともに、略平板形状の前記磁場検出部と略平板形状の前記信号演算部は、対向するように配置された互いの側面が導電体のリードにて接続されて、前記磁場検出部の底面と前記信号演算部の底面とがほぼ直角となるように前記リードが曲げられている、磁電変換ICを備えた回転角度検出装置である。
前記回転角度検出装置には、2個の前記磁電変換ICが用いられており、それぞれの前記磁電変換ICは、前記信号演算部の底面が前記回転軸に対して平行に配置され、且つ前記磁場検出部の底面が前記回転軸に対して垂直に配置され、それぞれの前記磁電変換ICの前記磁場検出部は、いずれも前記回転軸上に配置されている。
そして、それぞれの前記磁電変換ICにおける前記リードは、前記信号演算部から前記磁場検出部に至る間において、前記回転軸から遠ざかる方向に曲げられた第1湾曲部が形成された後、90度よりも大きな角度となるように逆方向に曲げられた第2湾曲部が形成され、2個所の湾曲部にて略S字形状に曲げられており、前記回転軸から前記リードの前記第2湾曲部の端部までの距離が小さくなるように、前記リードは前記磁場検出部から確保しなければならない直線状態の長さまで直線状態が維持された後で前記第2湾曲部が形成され、前記信号演算部が前記回転軸に近づけられている。
そして、略平板形状の前記磁場検出部の底面が略平板形状の信号演算部の底面に対してほぼ直角となるように前記リードを曲げ加工するステップ、凸状形状を有するとともに先端部に前記磁場検出部を案内するガイド溝が形成された下金型を用いて、前記リードを曲げ加工した磁電変換ICの磁場検出部を前記ガイド溝に合致させて載置するステップ、前記下金型を覆う凹状形状の封止空間が形成された上金型を用いて、前記磁電変換ICを載置した前記下金型の上から前記上金型を被せるステップ、前記封止空間内に樹脂を充填して前記磁電変換ICを樹脂成形にて封止するステップ、とからなる回転角度検出装置の製造方法である。
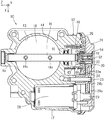
次に図1を用いて、自動車等の車両に搭載されている電子制御式のスロットル制御装置10の全体構成について説明する。なお、スロットル制御装置10の説明については、図1における上下左右を基準として説明を行い、左方向をZ軸方向、下方向をX軸方向、紙面の奥から手前に向かう方向をY軸方向としている。
スロットルボデー12はY軸方向に貫通するように形成された吸入空気の通路となる中空円筒状のボア13を形成するボア壁部14と、スロットルバルブ18を駆動する駆動モータ28を収容するモータハウジング部17と、右側部にギヤ収容部を備えている。
ボア壁部14には、ボア13を径方向に(この場合、Z軸方向)に横切る金属製のスロットルシャフト16が、左右に設けられた軸受部15にて回転可能に支持されている。
スロットルシャフト16には、円板状をなすバタフライ式のスロットルバルブ18がスクリュ18sにて固定されている。
スロットルバルブ18は、スロットルシャフト16と一体となって回転することにより、ボア13を開閉制御する。
スロットルギヤ22と、スロットルギヤ22と対向しているスロットルボデー12との間には、コイルスプリングからなるバックスプリング26が設けられており、バックスプリング26はスロットルギヤ22を常に閉じる方向に付勢している。
駆動モータ28は、運転者のアクセルペダルの踏み込み量等に基づいて、エンジン制御装置(図示省略)から出力される駆動信号により回転駆動される。
また駆動モータ28の出力回転軸は右方に突出されており、先端にはピニオンギヤ29が設けられている。
スロットルボデー12の右側面には、互いに平行な回転軸回りに回転可能に支持されたピニオンギヤ29、カウンタギヤ24、スロットルギヤ22が配置されている。そしてピニオンギヤ29はカウンタギヤ24の大径ギヤ部24aと噛合いされており、カウンタギヤ24の小径ギヤ部24bはスロットルギヤ22のギヤ部22w(図5(A)参照)と噛合いされている。
また、スロットルギヤ22の回転軸上(図1に示すスロットルギヤ22の右側)には、スロットルギヤ22の回転角度を検出するための回転角度検出装置40が配置されている。
そして、スロットルボデー12の右側から、回転角度検出装置40、スロットルギヤ22、カウンタギヤ24、ピニオンギヤ29を覆うセンサカバー30にて蓋がされている。
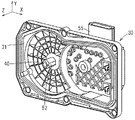
次に図2を用いてセンサカバー30の外観について説明する。図2はセンサカバー30におけるスロットルボデー12と対向する側から見た斜視図を示している。
センサカバー30のカバー本体31は例えば樹脂製であり、インサート成形により、略円柱形状の回転角度検出装置40が一体化されている。またセンサカバー30におけるスロットルボデー12と対向する側には、図2に示すように回転角度検出装置40が突出している。そして回転角度検出装置40の先端部は、図1及び図5(B)に示すように、スロットルギヤ22の磁場空間A1内に、同軸状に且つ遊嵌状に挿入されている。すなわち、回転角度検出装置40は、スロットルギヤ22の永久磁石41及びヨーク43に対して非接触の状態を保っている。
なお、回転角度検出装置40は、図3(A)〜(C)に示すように配線ターミナル54が接続された状態でインサート成形されており、センサカバー30には、配線ターミナル54の端部である接続端子部54aを他の機器と接続するためのコネクタ55が形成されている。
そして図4(A)に示すように、回転角度検出装置40の各端子49は、配線ターミナル54に接続されている。また、配線ターミナル54が接続された回転角度検出装置40の外観は図3(A)〜(C)に示すとおりである。なお、図3(B)及び(C)に示す図では、回転角度検出装置40の内部の空洞部に電子部品(コンデンサ等)を挿入して配線ターミナル54に接続している例を示している。後述するように回転角度検出装置40は下金型を抜き取ったあとの空洞部が形成されるので、この空洞部を利用して、配線ターミナル54に接続するべき電子部品を収容するとスペースメリットが大きい。
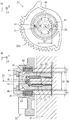
次に図5(A)を用いてスロットルギヤ22の外観及び構造を説明する。
図5(A)は図1の右側からスロットルギヤ22を見た図である。
スロットルギヤ22は、回転軸ZS回りに回転し、当該回転軸ZSの周囲は回転角度検出装置40を挿入するための円柱状空洞部である磁場空間A1が形成されている(図5(B)参照)。
この磁場空間A1の側面部には、磁性材料にて形成された円筒形状のヨーク43、及びヨーク43の内側に配置された一対の永久磁石41(界磁部材に相当)が一体的に設けられている。一対の永久磁石41は、対向するように固定されており、互いに異なる磁極を対向させている。
この構成により、磁場空間A1内には、図1(A)に示すように、N極を対向させている永久磁石41からS極を対向させている永久磁石41に向けて、回転軸ZSに直交する磁束線(図1(A)内で一点鎖線にて示す線)が発生している。
回転角度検出装置40は、図4に示すように略円柱形状であり、スロットルギヤ22の回転軸ZSと同軸上に配置され、スロットルギヤ22の磁場空間A1内に挿入されている。
回転角度検出装置40には、磁気の変化を検出する磁場検出部45(図6参照)と、磁場検出部からの検出信号を処理して磁気の変化に応じた回転角度信号を出力する信号演算部47(図6参照)と、を有する(2個の)磁電変換IC44(図6参照)が、樹脂モールド52にて封入されている。
この図5(B)に示す状態からスロットルギヤ22が、回転角度検出装置40に対して相対的に、回転軸ZS回りに回転すると、磁場空間A1内の磁束の方向が変化する。
そして変化した磁束の方向は磁場検出部45にて検出され、変化した磁束の方向に応じた回転角度信号が信号演算部47から出力される。
そのためには、希土類等を含んで磁力の大きな永久磁石41を使用するか、より大きな永久磁石41を使用するか、対向配置する2個の永久磁石41の間隔を小さくする必要がある。
図5(B)に示すように、本実施の形態にて説明するスロットル制御装置10では、永久磁石41の間隔(径D2)をより小さくし、且つ間隔を小さくした分、厚さ41Lがより厚い永久磁石41(すなわち、より大きな永久磁石)を使用することで磁束密度を大きくする。
従って、図5(B)に示すように磁場空間A1内の径D2がより小さくなるので、回転角度検出装置40の径D1もより小さくする必要がある。
ところが、回転角度検出装置40内に設ける磁電変換IC44の磁場検出部45の大きさは変わらない。
そこで、磁電変換IC44のリード46の曲げ形状を工夫することで、回転角度検出装置40の径D1を、より小さくする。
次に図6を用いて磁電変換ICの外観等について説明する。
磁電変換ICは既存のものであり、磁気の変化を検出する略平板状の磁場検出部45と、磁場検出部45からの検出信号を処理して磁気の変化に応じた回転角度信号を出力する略平板状の信号演算部47と、を有している。
また、略平板状の磁場検出部45と略平板状の信号演算部47は、対向するように配置された互いの側面が導電体のリード46にてストレート状に接続されている。また信号演算部47には、回転信号を出力する端子や電源等を供給する端子である端子側リード48が接続されている。
磁場検出部45は、例えばMR素子と呼ばれる磁気抵抗素子を備えており、当該磁気抵抗素子は、金属製の板状部材である位置決め部45cの中央部に取り付けられている。そして位置決め部45cは、磁場検出部45における対向する側面(リード46が接続されていない側面)の双方から突出している。
また図5(B)に示すように、平板状の磁場検出部45の上面と底面(磁場検出部45において最も面積が大きい面)は、スロットルギヤ22の回転軸ZSと直交するように配置され、且つ磁場検出部45内の磁気抵抗素子(位置決め部45cの中央)は回転軸ZS上に配置される。
このため、図6(B)及び(C)に示すように、信号演算部47の底面47M(磁場検出部において最も面積が大きい面)と磁場検出部45の底面45M(磁場検出部45において最も面積が大きい面)とがほぼ直角となるようにリード46を湾曲させる。
なお、リード46を曲げ加工する際、図7に示すように磁場検出部45から所定距離L2まで、及び信号演算部47から所定距離L3まで、は直線状態を確保しなければならない。また湾曲部R1、R2の径は、所定曲率以上を確保しなければならない。
本実施の形態におけるリード46の湾曲形状(図7に実線にて示す)は、従来のリード460の湾曲形状(点線にて示す)と比較して、回転角度検出装置40における径D1方向の長さ(図5(B)参照)を、より小さくすることができる。
これにより、図5(B)に示す回転角度検出装置40の径D1を従来よりも、より小さくすることができるので、永久磁石41の間隔(径D2)をより小さくすることが可能であり、間隔を小さくした分、永久磁石41のB−H曲線上の動作点が高くなる(パーミアンス係数が大きくなる(図14参照))。
従って、磁束密度をより大きくすることが可能であり、より安定的、且つより高精度に回転角度を検出することができる。また、永久磁石41の間隔を小さくすることで、従来では用いることができなかった安価な比較的性能の低い磁石や薄型の磁石を用いても、十分な磁束密度が得られ、コストの低減、スロットルギヤ22の小型化及び軽量化が可能となる。また、永久磁石41の間隔(径D2)を小さくした分、永久磁石41の厚さ41Lをより厚くすることも可能である。この場合、磁束密度をさらに大きくすることができ、角度検出の安定性及び精度がさらに向上する。また、従来と同じ厚さでも、永久磁石の動作点が上がるため、より高い磁束密度が得られる。
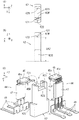
次に図8(A)〜(D)を用いて、磁電変換ICのリード46を略S字形状に曲げる手順について説明する。
まず図8(A)に示すように、磁場検出部45とリード46と信号演算部47と端子側リード48が直線状につながっている磁電変換IC44に対して、リード46における磁場検出部45に隣接する位置を、Z軸方向(磁電変換IC44の底面45Mに直交する方向)から治具J1、J2を用いて挟み込み、保持する。
そして図8(A)及び(B)に示すように、治具J3を用いて、治具J1に隣接するリード46を底面45Mの方向に押し込み、リード46の湾曲部R1(図7参照)の一部を形成する。
次に図8(C)及び(D)に示すように、リード46の湾曲部R2及び湾曲部R1の一部の形状(図7参照)を有する治具J4をX軸方向に移動させてリード46を押し込み、湾曲部R1の残りの形状と湾曲部R2の形状を形成する。なお、治具J5は信号演算部47の位置を規制するものであり、信号演算部47の底面が当接する治具である。
以上に説明した手順及び治具にて、磁電変換ICのリード46の形状を適切なS字形状に湾曲させることが容易にできる。
なお、以降の説明ではリード46をS字形状に湾曲させた磁電変換IC44を用いた例の製造方法を説明するが、従来のようにリード46をL字形状に湾曲させた磁電変換ICを用いた製造方法にも適用することができる。
次に図9〜図11を用いて回転角度検出装置40の第1の製造方法について説明する。第1の製造方法は、下金型K2の形状(図9(A)〜(C)参照)が第2の製造方法における下金型K3の形状(図12参照)とは異なる。
回転角度検出装置40の第1の製造方法は、図11(A)に示すように、下金型K2に2個の磁電変換IC44を位置決めして載置し、その上から上金型K1を被せ、注入口Inから封止空間52Kに樹脂を充填してインサート成形する方法である。
下金型K2は樹脂モールド部52の空洞空間K2K(図11(B)参照)を形成する金型であり、上方に向かって凸状に突出している。
そして下金型K2の先端部には、磁電変換IC44の位置決め部45cを案内する上下方向(この場合、Z軸に平行な方向)に形成されたガイド溝K2Mが形成されている。また、ガイド溝K2Mの先方(ガイド溝K2Mに沿って移動する移動先の方向、この場合、Z軸と反対方向)には、磁場検出部45の底面45Mの位置(Z軸方向の位置)を位置決めする底面基準面K23が形成されている。例えば底面基準面K23は、下金型K2の下端からZ軸方向に基準距離LK2となる位置に形成されている。
図10(A)〜(C)に示すように、ガイド溝K2Mにて、それぞれの磁電変換IC44の位置決め部45c(すなわち磁場検出部45)のX軸方向及びY軸方向の位置が位置決めされ、底面基準面K23にて下方の磁電変換IC44の磁場検出部45のZ軸方向の位置が位置決めされ、当該下方の磁電変換IC44(図10(A)の場合、左側の磁電変換IC44)の磁場検出部45の上面にて上方の磁電変換IC44(図10(A)の場合、右側の磁電変換IC44)のZ軸方向の位置が位置決めされる。
これにより、それぞれの磁場検出部45の磁気抵抗素子(位置決め部45cの中央に配置されている)は、いずれも回転軸ZS上に位置決めされる。
また、それぞれの磁電変換IC44の信号演算部47は、X軸方向(図10(A)の場合、左右方向)に底面を対向させて平行に、所定間隔となるように配置される。
図16(A)及び(B)に示す従来の製造方法では、作業者は図16(A)及び(B)に示す従来の下金型162の小さな径の薄暗い穴の奥に形成された位置決め位置に、磁場検出部45の位置決め部45cを一致させるように載置する必要があり、非常に繊細な作業が要求され、手間と時間がかかっている。
しかし、本実施の形態にて説明した製造方法では、下金型K2の凸形状部の先端、すなわち作業者から見て最も手前側となる位置に磁場検出部45の位置決め部45cを一致させればよいので、非常に容易に磁電変換IC44を下金型K2に載置することができる。また上金型K1を被せる際も、非常に容易に上金型K1を被せることができる。従って、従来と比較して、非常に作業効率が良い。
そして上金型K1の上方に形成された注入口Inから樹脂を注入し、封止空間52Kを樹脂で充填して樹脂モールド部52を形成する。なお、樹脂モールド部52を形成する樹脂には、例えば成形樹脂材料(ポリブチレンテレフタレート(PBT)樹脂等)に発泡剤が添加された発泡樹脂を用いる。
樹脂を充填している際、磁電変換IC44の磁場検出部45は力F1にて下金型K2の方向に押し付けられ、磁電変換IC44の信号演算部47は力F2にて下金型K2の方向に押し付けられるので、磁電変換IC44の位置がずれることはない。
次のステップでは、下金型K2のガイド溝K2Mにて磁場検出部45を位置決めし、下金型K2に2個の磁電変換IC44を載置する。
次のステップでは、磁電変換IC44を載置した下金型K2の上から、下金型K2を覆う封止空間52Kが形成された上金型K1を被せる。
そして次のステップでは、封止空間52K内に樹脂を充填して2個の磁電変換IC44を樹脂モールド部52にて封止する。
樹脂モールド部52は、略円柱形状に形成されており、2個の磁電変換IC44、及び端子49における信号演算部47の端子側リード48に接続した側をモールドしている。
また回転角度検出装置40には、下金型K2を抜き取った後の空洞空間K2Kが形成されている。図3(A)に示すように回転角度検出装置40に配線ターミナル54を接続した後、図13(C)に示すように配線ターミナル54に接続した電子部品を空洞空間K2Kに収容すると、非常に便利である。例えばセンサノイズ除去用のコンデンサを収容して接続すると、磁電変換ICに非常に近い位置で、より効果的にノイズ除去が可能であるとともに、図2に示すようにセンサカバー30にモールドした際、このコンデンサが他の部材に干渉するような位置に配置されることがない。
なお、回転角度検出装置40の樹脂モールド部52は、図11(A)に示すように2個の磁電変換IC44をすっぽりと覆う封止空間52Kを充填して形成されているので、略円柱形状の回転角度検出装置40の外側上面(端子49と反対側の端面)、及び外側側面(円柱形状の外周面)は、樹脂モールド部52で完全に密封され、磁電変換IC44のいずれの部分も露出しないので、図2に示すセンサカバー30としてインサート成形した後、外部からの水等の浸入を適切に防止できる。
次に図12、図13を用いて回転角度検出装置40の第2の製造方法について説明する。第2の製造方法は、下金型K3の形状(図12(A)〜(C)参照)が第1の製造方法の下金型K2の形状(図9参照)とは異なり、他は第1の製造方法と同じである。以下、この相違点について主に説明する。
次に図12(A)〜(C)を用いて下金型K3の外観について説明する。図12(A)は下金型K3の平面図を示しており、図12(B)は下金型K3の正面図を示しており、図12(C)は下金型K3に2個の磁電変換IC44を載置する様子を説明する斜視図を示している。
そして下金型K3の先端部には、磁電変換IC44の位置決め部45cを案内する上下方向(この場合、Z軸に平行な方向)に形成されたガイド溝K3Mが形成されている。第1の製造方法の下金型K2との相違点としては、ガイド溝K3Mの終端部に位置決め部45cのZ軸方向の位置を位置決めするガイド基準面K33が形成されている点と、第1の製造方法の下金型K2の底面基準面K23に対応する面K34から下金型K3の下端までのZ軸方向の距離LK34が、第1の製造方法における基準距離LK2よりも短い点である。
下金型K3においては、ガイド基準面K33から下金型K3の下端までのZ軸方向の距離が基準距離LK3(ただし、基準距離LK2とは長さが異なる)であり、面K34から下金型K3の下端までのZ軸方向の距離LK34は基準となる距離ではない。
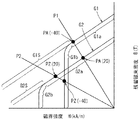
次に図14に示すB−Hカーブ特性を用いて、本実施の形態にて説明した回転角度検出装置40のメリットについて説明する。
図4に示すB−Hカーブ特性は、磁石の特性を示すものであり、縦軸は残留磁束密度B[T]、横軸は磁界強度H[kA/m]を示している。
例えば安価なフェライト系の永久磁石の場合、温度が20℃の場合はグラフG2の曲線の特性を示し、温度が−40℃の場合はグラフG1の曲線の特性を示す。
グラフG1において、領域G1aの部分では残留磁束密度の変化に応じて磁界強度がほぼリニアに変化する好ましい特性を示しているが、領域G1bでは残留磁束密度の変化に対して磁界強度の変化が無く好ましくない特性となる。グラフG2においても、領域G2aは好ましい特性であるが、領域G2bは好ましくない特性である。
これに対してレアメタル等を含む高価な永久磁石の場合、グラフG1の領域G1bは点線で示した領域G1Sのように修正され、グラフG2の領域G2bは点線で示した領域G2Sのように修正される。
これに対して本実施の形態にて説明した回転角度検出装置40は、図5(B)に示す径D1がより小さくなり、これにより、スロットルギヤ22の径D2がより小さくなり、永久磁石の間隔がより小さくなる。このため、パーミアンス線の位置が、例えば図14のパーミアンス線P1の位置へと変化する。この場合、20℃の磁石の動作点は好ましい領域G2a上のPA(20)であり、−40℃の磁石の動作点も好ましい領域G1a上のPA(−40)となる。この場合、環境温度が20℃から−40℃に変化した後、20℃に戻っても磁石の動作点がPA(20)に戻り、回転角度の検出精度が低下することはない。従って、特に高価な永久磁石を用いる必要がない。
また、本実施の形態の説明に用いた数値は一例であり、この数値に限定されるものではない。
12 スロットルボデー
13 ボア(吸気通路)
18 スロットルバルブ
22 スロットルギヤ
30 センサカバー
31 カバー本体
40 回転角度検出装置
41 永久磁石(界磁部材)
43 ヨーク
44 磁電変換IC
45 磁場検出部
45c 位置決め部
46 リード
47 信号演算部
48 端子側リード
49 端子
52 樹脂モールド部
54 配線ターミナル
A1 磁場空間
C1 電子部品
K1 上金型
K2、K3 下金型
K23 底面基準面
K33 ガイド基準面
K2K、K3K 空洞空間
K2M、K3M ガイド溝
ZS 回転軸
Claims (2)
- 界磁部材を有して所定の回転軸回りに回転する回転部材との相対的な回転にともなう前記回転軸に直交する磁気の変化を検出する略平板形状の磁場検出部と、当該磁場検出部からの検出信号を処理して磁気の変化に応じた回転角度信号を出力する略平板形状の信号演算部と、を有するとともに、略平板形状の前記磁場検出部と略平板形状の前記信号演算部は、対向するように配置された互いの側面が導電体のリードにて接続されて、前記磁場検出部の底面と前記信号演算部の底面とがほぼ直角となるように前記リードが曲げられている、磁電変換ICを備えた回転角度検出装置において、
前記回転角度検出装置には、2個の前記磁電変換ICが用いられており、
それぞれの前記磁電変換ICは、前記信号演算部の底面が前記回転軸に対して平行に配置され、且つ前記磁場検出部の底面が前記回転軸に対して垂直に配置され、
それぞれの前記磁電変換ICの前記磁場検出部は、いずれも前記回転軸上に配置されており、
それぞれの前記磁電変換ICにおける前記リードは、前記信号演算部から前記磁場検出部に至る間において、前記回転軸から遠ざかる方向に曲げられた第1湾曲部が形成された後、90度よりも大きな角度となるように逆方向に曲げられた第2湾曲部が形成され、2個所の湾曲部にて略S字形状に曲げられており、前記回転軸から前記リードの前記第2湾曲部の端部までの距離が小さくなるように、前記リードは前記磁場検出部から確保しなければならない直線状態の長さまで直線状態が維持された後で前記第2湾曲部が形成され、前記信号演算部が前記回転軸に近づけられている、
回転角度検出装置。 - 請求項1に記載の回転角度検出装置であって、
それぞれの前記磁場検出部の内部には、磁束の方向に応じた検出信号を出力する磁気抵抗素子が設けられており、いずれの前記磁気抵抗素子も前記回転軸上に配置されている、
回転角度検出装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010098731A JP5437147B2 (ja) | 2010-04-22 | 2010-04-22 | 回転角度検出装置 |
| FR1153361A FR2959307B1 (fr) | 2010-04-22 | 2011-04-19 | Capteur d'angle de rotation et procede de fabrication de ce capteur |
| DE102011018180A DE102011018180A1 (de) | 2010-04-22 | 2011-04-19 | Rotationswinkelsensoren und Herstellungsverfahren dafür |
| US13/089,432 US20110260719A1 (en) | 2010-04-22 | 2011-04-19 | Rotational angle sensors and manufacture methods thereof |
| CN201110102564.2A CN102252603B (zh) | 2010-04-22 | 2011-04-21 | 旋转角度检测装置及旋转角度检测装置的制造方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010098731A JP5437147B2 (ja) | 2010-04-22 | 2010-04-22 | 回転角度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011226982A JP2011226982A (ja) | 2011-11-10 |
| JP5437147B2 true JP5437147B2 (ja) | 2014-03-12 |
Family
ID=44751682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010098731A Expired - Fee Related JP5437147B2 (ja) | 2010-04-22 | 2010-04-22 | 回転角度検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20110260719A1 (ja) |
| JP (1) | JP5437147B2 (ja) |
| CN (1) | CN102252603B (ja) |
| DE (1) | DE102011018180A1 (ja) |
| FR (1) | FR2959307B1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5517083B2 (ja) * | 2011-04-22 | 2014-06-11 | 株式会社デンソー | 回転角センサ |
| CN102997840B (zh) * | 2011-09-14 | 2016-01-27 | 爱三工业株式会社 | 旋转角度检测装置 |
| JP5897387B2 (ja) * | 2012-04-19 | 2016-03-30 | 愛三工業株式会社 | 回転検出装置の製造方法 |
| JP5626298B2 (ja) * | 2012-09-18 | 2014-11-19 | 株式会社デンソー | 位置検出装置 |
| CN203132570U (zh) * | 2013-02-27 | 2013-08-14 | 大陆汽车电子(芜湖)有限公司 | 电子节气门的传感器部件及具有其的电子节气门 |
| JP5949672B2 (ja) * | 2013-06-10 | 2016-07-13 | 日立金属株式会社 | 検出装置、及び検出装置の製造方法 |
| JP6017401B2 (ja) * | 2013-11-05 | 2016-11-02 | 愛三工業株式会社 | 回転角度検出センサ |
| US11293355B2 (en) * | 2018-08-23 | 2022-04-05 | Mikuni Corporation | Electronically controlled throttle device for engine |
| JP2020189534A (ja) * | 2019-05-21 | 2020-11-26 | 株式会社デンソー | アクセル装置 |
| WO2022024961A1 (ja) * | 2020-07-27 | 2022-02-03 | 日本精機株式会社 | 位置検出装置 |
| JP2022024439A (ja) * | 2020-07-28 | 2022-02-09 | 株式会社デンソー | 回転検出装置 |
| KR102874140B1 (ko) * | 2024-12-23 | 2025-10-21 | 파크전자(주) | 비접촉식 자기장 기반 고정밀 각도 센서 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5021736A (en) * | 1989-09-19 | 1991-06-04 | Texas Instruments Incorporated | Speed/position sensor calibration method with angular adjustment of a magnetoresistive element |
| US5121289A (en) * | 1990-01-31 | 1992-06-09 | Honeywell Inc. | Encapsulatable sensor assembly |
| US5631557A (en) * | 1996-02-16 | 1997-05-20 | Honeywell Inc. | Magnetic sensor with encapsulated magnetically sensitive component and magnet |
| WO2005080922A2 (de) * | 2004-02-24 | 2005-09-01 | Prettl, Rolf | Sensorhalter und verfahren zu dessen herstellung |
| DE102005027767A1 (de) * | 2005-06-15 | 2006-12-28 | Infineon Technologies Ag | Integriertes magnetisches Sensorbauteil |
| JP4317841B2 (ja) * | 2005-09-28 | 2009-08-19 | 三菱電機株式会社 | 内燃機関の吸気制御装置 |
| JP4680136B2 (ja) | 2006-06-29 | 2011-05-11 | 愛三工業株式会社 | 回転角度検出装置 |
| DE102007030093A1 (de) * | 2006-06-29 | 2008-06-05 | Aisan Kogyo K.K., Obu | Drehwinkelerfassungsvorrichtungen |
| JP4696209B2 (ja) * | 2006-07-05 | 2011-06-08 | 多摩川精機株式会社 | 角度検出器 |
| US7946555B2 (en) * | 2006-11-16 | 2011-05-24 | Aisan Kogyo Kabushiki Kaisha | Rotational angle sensors and throttle devices |
| JP2008145258A (ja) | 2006-12-08 | 2008-06-26 | Keihin Corp | 回転検出センサ |
| ATE490474T1 (de) * | 2007-02-19 | 2010-12-15 | Nxp Bv | Sensorpaket |
| JP4851973B2 (ja) * | 2007-03-22 | 2012-01-11 | 本田技研工業株式会社 | 回転センサ及びその製造方法 |
-
2010
- 2010-04-22 JP JP2010098731A patent/JP5437147B2/ja not_active Expired - Fee Related
-
2011
- 2011-04-19 DE DE102011018180A patent/DE102011018180A1/de not_active Ceased
- 2011-04-19 FR FR1153361A patent/FR2959307B1/fr not_active Expired - Fee Related
- 2011-04-19 US US13/089,432 patent/US20110260719A1/en not_active Abandoned
- 2011-04-21 CN CN201110102564.2A patent/CN102252603B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102252603B (zh) | 2014-06-25 |
| CN102252603A (zh) | 2011-11-23 |
| JP2011226982A (ja) | 2011-11-10 |
| US20110260719A1 (en) | 2011-10-27 |
| FR2959307B1 (fr) | 2018-03-16 |
| DE102011018180A1 (de) | 2011-10-27 |
| FR2959307A1 (fr) | 2011-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5437147B2 (ja) | 回転角度検出装置 | |
| JP4433886B2 (ja) | 回転角度検出装置 | |
| CN101558285B (zh) | 用于制造具有角度传感器的支承部件的方法 | |
| JP4191940B2 (ja) | ロータリポジションセンサ | |
| JP5626298B2 (ja) | 位置検出装置 | |
| JP5189063B2 (ja) | 回転角検出装置及びスロットル制御装置 | |
| JP5225966B2 (ja) | 回転角検出装置の製造方法 | |
| JP4138527B2 (ja) | 非接触式液面レベルセンサの製造方法 | |
| JP2012145487A (ja) | センサモジュール | |
| US20070068491A1 (en) | Intake-air control device for internal combustion engine | |
| JP4794769B2 (ja) | エンジン制御装置、ECU(ElectronicControlUnit)およびECUケース | |
| CN110832753A (zh) | 马达装置的制造方法以及马达装置 | |
| JP2025188265A (ja) | ステーターユニット、電動弁および電動弁装置 | |
| WO2011083661A1 (ja) | 液面検出装置とその製造方法 | |
| JP2005091275A (ja) | 回転角センサ | |
| JP2005106779A (ja) | 回転角センサ | |
| JP2004332635A (ja) | スロットル制御装置 | |
| JP5730726B2 (ja) | 回転角度検出装置 | |
| JP2005106781A (ja) | 回転角センサ及びその製造方法 | |
| JP5035746B2 (ja) | 回転検出装置 | |
| JP2009098005A (ja) | 位置検出器 | |
| JP2011089949A (ja) | 回転角検出装置及びその製造方法並びにスロットル制御装置 | |
| JP2017044685A (ja) | 磁界検出装置 | |
| JP2004309448A (ja) | 磁気センサ | |
| JP2011102770A (ja) | 回転角検出装置及びスロットル制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5437147 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |