JP5328530B2 - 締付部材装填装置 - Google Patents
締付部材装填装置 Download PDFInfo
- Publication number
- JP5328530B2 JP5328530B2 JP2009161636A JP2009161636A JP5328530B2 JP 5328530 B2 JP5328530 B2 JP 5328530B2 JP 2009161636 A JP2009161636 A JP 2009161636A JP 2009161636 A JP2009161636 A JP 2009161636A JP 5328530 B2 JP5328530 B2 JP 5328530B2
- Authority
- JP
- Japan
- Prior art keywords
- bolt
- head
- unit
- holding
- fastening member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
Description
例えば、この締付装置は、ロボットアームと、このロボットアームの先端に設けられたナットランナと、を備える。
ところで、このナットランナのソケットにボルトを保持させるため、ボルト装填装置が用いられる。
ボルト装填装置は、予め整列されたボルトに対し、ボルトの上方からソケットを回転しながらボルトの頭部に接近させ、ボルトの頭部と位相を合わせることにより、ボルトとソケットを嵌合させる(例えば、特許文献1参照)。
そして、この発明によれば、保持部と締付部材との相対距離が第1所定値未満となった場合に、締付部材が保持部に嵌合したと判定した。したがって、従来のように締付部材の先端を保持部に完全に挿入しなくても、僅かに挿入しただけで、締付部材が保持部に嵌合したと判定できるので、締付部材と保持部との位相合わせが完了した後、直ちに、保持部の回転の停止等の次の動作を実行でき、タイムロスを低減できる。
そこで、この発明によれば、保持部と締付部材との相対距離が第2所定値未満となった場合には、締付部材が保持部に嵌合していないと判定した。したがって、締付部材が存在していないにもかかわらず締付部材を保持しようとした場合でも、迅速に次に動作に移ることができる。
よって、例えば、締付部材の位相と保持部の位相とが一致しないにもかかわらず、保持部のマグネットによりこの締付部材を吸着すると、この締付部材が保持部に対して傾斜した姿勢となる場合があるが、このような事態を回避できる。また、締付部材と保持部との嵌合が失敗した場合でも、保持部を締付部材から一旦離し、その後、保持部を締付部材に接近させて、再び締付部の保持を試みるリトライが可能となる。
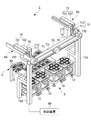
図1は、本発明の一実施形態に係る締付部材装填装置が適用されたボルト装填システム1の概略を示す斜視図である。
このボルト装填システム1は、マガジン10に締付部材としてのボルトBを装填する装置であり、ボルトBが載置されたボルト載置テーブル2と、マガジン10が載置された4つのマガジン載置テーブル3と、マガジン載置テーブル3でマガジン10を保持し、このマガジン10にボルト載置テーブル2に載置されたボルトBを装着する締付部材装填装置としての一対のボルト装填装置4A、4Bと、これらを制御する制御部としての制御装置80と、を備える。
ボルト装填装置4Aは、マガジン10を保持し、直下に位置するボルトBをマガジン10に装着するボルト装着機構70と、ボルト装着機構70を上下に移動させる第1移動機構71と、この第1移動機構71を水平な所定方向に移動させる第2移動機構72と、この第2移動機構72を水平かつ所定方向に交差する方向に移動させる第3移動機構73と、を備える。
第1移動機構71によれば、スライド機構712を駆動することで、ボルト装着機構70をスライドレール711に沿って上下に移動できる。
第2移動機構72によれば、スライド機構722を駆動することで、ボルト装着機構70をスライドレール721に沿って水平な所定方向に移動できる。
このスライドレール731は、ボルト装填装置4Aとボルト装填装置4Bとで共通となっている。
第3移動機構73によれば、スライド機構732を駆動することで、ボルト装着機構70をスライドレール731に沿って水平かつ所定方向に交差する方向に移動できる。
マガジン10は、円盤形状の基部11と、この基部11の背面側の中央に設けられた着脱部12と、基部11の外周面に沿って配置された8個の保持部としてのヘッド20と、を備える。
基部11には、8個の貫通孔が外周に沿って所定間隔置きに形成されており、これら貫通孔は、それぞれ、ヘッド収納部111となっている。
着脱部12は、いわゆるオートツールチェンジャである。
ボルト装着機構70は、ソケット41と、このソケット41を回転駆動する回転駆動部40と、この回転駆動部40をソケット41の回転軸に沿って進退させる進退駆動部50と、マガジン10を回転させてヘッド20のうちの1つを選択的にソケット41の回転軸上に位置させる切換部30と、を備えている。
マガジン駆動部31は、上述のように、第1移動機構71のスライドレール711にスライド可能に支持されている。
切換部30によれば、マガジン10の着脱部12を切換部30の着脱部32に装着して、マガジン駆動部31を駆動することにより、マガジン10が中心軸を回転軸Yとして回転し、ヘッド20が移動する。
モータ43とソケット41との間には、ソケット41をフローティングさせるためのスプリング44が介装されている。
この回転駆動部40は、モータ43を駆動することにより、ソケット41を、中心軸を回転軸Xとして回転させる。この回転駆動部40の回転軸Xは、マガジン10の回転軸Yに略平行となっている。
進退駆動部50は、シリンダ機構51を駆動することにより、回転駆動部40を回転軸Xに沿って前進あるいは後退させる。
ボルト収納ケース60は、複数のボルトBが頭部を上端側にして整列して保持している(図3参照)。このボルト収納ケース60は、ボルトBの首部が挿通される貫通孔611が複数形成されたケース本体61と、このケース本体61の内部に設けられて各ボルトBの下端側を把持する複数の把持部62と、を備える。
各把持部62は、一対の挟持片621を接近または離間することにより、ボルトBの下端側を把持する。
マガジン10のヘッド収納部111の内周面のうち正面側の3箇所には、突没可能なボール113を有するプランジャ112が設けられている。ボール113は、図示しないばねにより、ヘッド収納部111の内周面から突出する方向に付勢されている。
ヘッド収納部111の内周面のうちマガジン10の背面側の位置には、ピン114が突出している。
ヘッド20の先端面には、六画形状の凹部が形成されており、この凹部は、ボルトBの頭部が嵌合するボルト保持部23となっている。このボルト保持部23の底面には、磁石24が取り付けられており、この磁石24の磁力により、ボルトBを保持する。
この凹部221のヘッド20の先端側の壁面は、ヘッド20の軸方向に略垂直な垂直面222であり、凹部221のヘッド20の基端側の壁面は、ヘッド20の軸方向に対して傾斜したテーパ面223である。
このヘッド保持部411の内周面には、上述のプランジャ211のボール212が係合する凹部412が形成されている。
この凹部412のソケット41の先端側の壁面は、ソケット41の軸方向に対して傾斜したテーパ面413であり、凹部412のソケット41の基端側の壁面は、ソケット41の軸方向に略垂直な垂直面414である。
また、ソケット41の外周面には、マガジン10のピン114が嵌合するキー溝415がソケット41の回転軸に沿って形成されている。
制御装置80は、ボルト装着機構移動部81と、ボルト装着機構制御部82と、ボルト保持判定部83と、ボルト収納ケース制御部84と、を備える。
ボルト装着機構移動部81は、第1移動機構71、第2移動機構72、および第3移動機構73を制御して、ボルト装着機構70を所定の位置に移動する。
具体的には、回転駆動部40によりヘッド20を回転させながら、進退駆動部50によりヘッド20を前進させてボルトBに接近させ、ボルト保持判定部83によりボルトBがヘッド20に嵌合したと判定した場合には、進退駆動部50によりヘッド20を後退させる。
すなわち、ヘッド20の先端面がボルトBの頭部をなめている場合、ヘッド20の位相とボルトBの位相とは一致しておらず、ボルトBがヘッド20に嵌合している、とはいえない。しかしながら、図8(b)に示すように、ボルトBの頭部がヘッド20のボルト保持部23の内部に僅かに挿入されて、相対距離dがd1となった場合には、ヘッド20の位相とボルトBの位相とは一致しており、ボルトBがヘッド20に嵌合している、といえる。
すなわち、図8(c)に示すように、ボルトBの頭部がヘッド20のボルト保持部23の内部に完全に挿入されると、ボルトBの前進が停止し、相対距離dはd3となる。
したがって、d3以下の値であるd2を第2所定値とすると、相対距離dが第2所定値d2未満となった場合には、ヘッド20の直下にボルトBが存在していない可能性がある。
すなわち、上述のように、ボルトBの頭部がヘッド20のボルト保持部23の内部に僅かに挿入されると、相対距離dはd1となる。したがって、相対距離dが第1所定値d1以上である状態では、ヘッド20の先端面がボルトBの頭部をなめているので、このような状態が所定時間に亘っている場合、何らかの不具合が生じた可能性がある。
なお、この場合、ヘッド20を後退させて、ヘッド20をボルトBから一旦離し、その後、再びヘッド20を前進させてボルトBの保持にリトライしてもよい。リトライを行うことにより、ヘッド20にボルトBが嵌合する確率が高くなり、ボルトBをヘッド20にさらに確実に保持させることができる。
まず、ステップS1では、図10に示すように、制御装置80により、第1移動機構71、第2移動機構72、第3移動機構73を制御して、ボルト装填システム1を所定の種類のボルトBが収納されたボルト収納ケース60に接近させ、ボルト装填システム1のソケット41の回転軸X上にこのボルトBが位置するように移動する。
また、切換部30を駆動してマガジン10を回転させ、この所定の種類のボルトBに応じたヘッド20を選択的にソケット41とボルトBとの間に配置させておく。
さらに、進退駆動部50を駆動して、ソケット41をさらに下降させて、このソケット41をヘッド収納部111に貫通させる。このとき、ヘッド20の凹部221とマガジン10のプランジャ112との係合が解除されて、ヘッド20は、マガジン10から脱離して、ソケット41とともにマガジン10の下方に移動する。
その後、ソケット41を下降させて、このヘッド20を所定位置まで移動する。
ステップS9では、力覚センサによるヘッド20のトルク反力Fの検出、および、タイマによる経過時間の計測を終了し、ステップS10では、回転駆動部40によるヘッド20の回転を停止する。
ステップS11では、進退駆動部50を駆動して、ヘッド20を下降から上昇に切り替える。すると、ソケット41とともにヘッド20が後退し、ヘッド20の凹部221とマガジン10のプランジャ112とが係合し、ヘッド20がマガジン10に再び保持される。
(1)ヘッド20とボルトBとの相対距離dが第1所定値d1未満となった場合に、ボルトBがヘッド20に嵌合したと判定した。したがって、従来のようにボルトの先端をヘッド20に完全に挿入しなくても、僅かに挿入しただけで、ボルトBがヘッド20に嵌合したと判定できるので、ボルトBとヘッド20との位相合わせが完了した後、直ちにヘッド20の回転を停止できるから、タイムロスを低減できる。
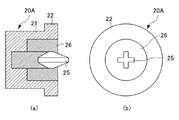
例えば、本実施形態では、ヘッド20を、ボルトBを保持する構造としたが、これに限らず、図10に示すように、ヘッド20Aを、ねじを保持する構造としてもよい。すなわち、ヘッド20Aの先端面には、略十字形状の突出部が形成されており、この突出部は、ねじの頭部が嵌合するねじ保持部25となっている。また、このねじ保持部25の周囲には、磁石26が取り付けられており、この磁石26の磁力により、ねじを保持する。
20、20A ヘッド(保持部)
40 回転駆動部
50 進退駆動部
62 把持部
80 制御装置(制御部)
B ボルト(締付部材)
d 相対距離
d1 第1所定値
d2 第2所定値
F トルク反力
Claims (4)
- 締付部材の一端側が嵌合可能な保持部と、
当該保持部を回転させる回転駆動部と、
前記保持部を回転軸に沿って進退させる進退駆動部と、
前記回転駆動部により前記保持部を回転させながら、前記進退駆動部により前記保持部を前進させて前記締付部材に接近させ、前記保持部と前記締付部材との相対距離が第1所定値未満となり、かつ、前記保持部の反力が所定値以上となった場合に、前記締付部材が前記保持部に嵌合したと判定する制御部と、
を備えることを特徴とする締付部材装填装置。 - 請求項1に記載の締付部材装填装置において、
前記制御部は、前記保持部と前記締付部材との相対距離が第1所定値よりも小さい第2所定値未満となった場合には、前記締付部材が前記保持部に嵌合していないと判定することを特徴とする締付部材装填装置。 - 請求項1または2に記載の締付部材装填装置において、
前記制御部は、前記締付部材が前記保持部に嵌合したと判定した場合には、前記進退駆動部により前記保持部を後退させることを特徴とする締付部材装填装置。 - 請求項1から3のいずれかに記載の締付部材装填装置において、
前記締付部材の他端側を把持する把持部をさらに備え、
前記制御部は、前記締付部材が前記保持部に嵌合したと判定した場合には、前記把持部による前記締付部材の把持を解除することを特徴とする締付部材装填装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009161636A JP5328530B2 (ja) | 2009-07-08 | 2009-07-08 | 締付部材装填装置 |
| CN200980150205.5A CN102245347B (zh) | 2008-12-16 | 2009-10-01 | 紧固装置 |
| GB1110782.8A GB2478101B (en) | 2008-12-16 | 2009-10-01 | Fastening device |
| US13/139,395 US8904615B2 (en) | 2008-12-16 | 2009-10-01 | Fastening device, method of loading fastening member, and device for loading fastening member |
| PCT/JP2009/067157 WO2010070966A1 (ja) | 2008-12-16 | 2009-10-01 | 締付装置、締付部材装填方法、および締付部材装填装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009161636A JP5328530B2 (ja) | 2009-07-08 | 2009-07-08 | 締付部材装填装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011016187A JP2011016187A (ja) | 2011-01-27 |
| JP5328530B2 true JP5328530B2 (ja) | 2013-10-30 |
Family
ID=43594386
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009161636A Expired - Fee Related JP5328530B2 (ja) | 2008-12-16 | 2009-07-08 | 締付部材装填装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5328530B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7047729B2 (ja) | 2018-11-29 | 2022-04-05 | トヨタ自動車株式会社 | 自動運転車両 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015145058A (ja) * | 2014-02-04 | 2015-08-13 | 三菱電機株式会社 | ネジ締め装置 |
| JP6356636B2 (ja) * | 2015-06-09 | 2018-07-11 | しげる工業株式会社 | 自動ネジ締め装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63283830A (ja) * | 1987-05-18 | 1988-11-21 | Honda Motor Co Ltd | ボルトの自動セツト装置 |
| JP2682229B2 (ja) * | 1990-11-15 | 1997-11-26 | トヨタ自動車株式会社 | ボルト供給装置 |
| JPH0666931U (ja) * | 1993-03-05 | 1994-09-20 | 関東自動車工業株式会社 | ナット供給装置 |
| JP3146774B2 (ja) * | 1993-07-30 | 2001-03-19 | スズキ株式会社 | 締付装置 |
-
2009
- 2009-07-08 JP JP2009161636A patent/JP5328530B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7047729B2 (ja) | 2018-11-29 | 2022-04-05 | トヨタ自動車株式会社 | 自動運転車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011016187A (ja) | 2011-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2010070966A1 (ja) | 締付装置、締付部材装填方法、および締付部材装填装置 | |
| JP6078413B2 (ja) | 工具交換方法及び工作機械 | |
| US9522451B2 (en) | Vertical machining center | |
| JP5328530B2 (ja) | 締付部材装填装置 | |
| JP2017127940A (ja) | ロボット装置 | |
| US9969040B2 (en) | Tool changer | |
| JPS6258860B2 (ja) | ||
| JP5474205B2 (ja) | 工具差替え装置、工具マガジンおよび工作機械 | |
| JP6146154B2 (ja) | ボルト締結方法及びボルト締結装置 | |
| JP4787311B2 (ja) | 締付装置 | |
| JP5185201B2 (ja) | 締付装置 | |
| JP5210143B2 (ja) | 締付部材装填方法 | |
| JP5351589B2 (ja) | 部材着脱装置および部材着脱方法 | |
| JP7339117B2 (ja) | 工作機械 | |
| JP4984301B2 (ja) | ボルト締付け方法及び装置 | |
| JPS6246291B2 (ja) | ||
| JP5341873B2 (ja) | ソケット | |
| JP5266149B2 (ja) | 回転抑制装置および回転抑制装置を用いた締結方法 | |
| JP3086330B2 (ja) | 工具交換装置 | |
| JP2884863B2 (ja) | チャック爪自動交換装置 | |
| JP5211575B2 (ja) | 工具収納装置 | |
| US20200180085A1 (en) | Fastening System | |
| JP6729329B2 (ja) | 工作機械 | |
| JPH0732238A (ja) | 工具交換装置 | |
| JP5728294B2 (ja) | 多軸ヘッド用搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130702 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130723 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |