JP5321622B2 - モータ制御方法およびその装置 - Google Patents
モータ制御方法およびその装置 Download PDFInfo
- Publication number
- JP5321622B2 JP5321622B2 JP2011054314A JP2011054314A JP5321622B2 JP 5321622 B2 JP5321622 B2 JP 5321622B2 JP 2011054314 A JP2011054314 A JP 2011054314A JP 2011054314 A JP2011054314 A JP 2011054314A JP 5321622 B2 JP5321622 B2 JP 5321622B2
- Authority
- JP
- Japan
- Prior art keywords
- current
- motor
- overcurrent protection
- value
- inverter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Control Of Ac Motors In General (AREA)
- Protection Of Generators And Motors (AREA)
Description
本発明に係るモータ制御方法の第3の態様は、インバータからの出力をモータに供給してモータを駆動するとともに、インバータを制御するための電流検出機能および過電流保護機能を有するに当たって、DCリンクから電流検出した電流値に基づいて過電流保護を行い、さらに、電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正し、前記過電流保護のための設定値を、前記電流指令の最大値と電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータまたは前記インバータの最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定した方法である。
本発明に係るモータ制御装置の第3の態様は、インバータからの出力をモータに供給してモータを駆動するとともに、インバータを制御するための電流検出機能および過電流保護機能を有するものであって、DCリンクから電流検出した電流値に基づいて過電流保護を行う過電流保護手段と、電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正する補正手段とを含み、前記過電流保護のための設定値を、前記電流指令の最大値と前記フィードバック制御する電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータまたは前記インバータの最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定したものである。
本発明に係るモータ制御方法の第3の態様は、トルク急変などにより過電流保護に起因する停止を防止することができるほか、上記第1の態様と同様の効果を奏する。
本発明に係るモータ制御装置の第3の態様は、トルク急変などにより過電流保護に起因する停止を防止することができるほか、上記第1の態様と同様の効果を奏する。
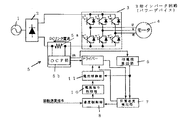
4 モータ
5 OCP部
10 電流指令制限部
11 電流制御部
26 相電流検出部
30 電流指令制限部
Claims (6)
- インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御方法であって、
DCリンクから電流検出した電流値に基づいて過電流保護を行い、さらに、電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正することを特徴とするモータ制御方法。 - インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御方法であって、
過電流保護のための電流検出とモータ相電流をフィードバック制御するための電流検出とを共用し、
前記過電流保護のための設定値を、前記フィードバック制御する電流制御系に供給すべき電流指令の最大値と前記電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータまたは前記インバータの最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定したモータ制御方法。 - インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御方法であって、
DCリンクから電流検出した電流値に基づいて過電流保護を行い、さらに、電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正し、
前記過電流保護のための設定値を、前記電流指令の最大値と電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータまたは前記インバータの最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定したモータ制御方法。 - インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御装置であって、DCリンクから電流検出した電流値に基づいて過電流保護を行う過電流保護手段(5)と、電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正する補正手段(30)とを含むことを特徴とするモータ制御装置。
- インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御装置であって、
モータ相電流をフィードバック制御する電流制御手段(11)と、
電流制御手段(11)に供給すべき電流指令の最大値を制限する電流指令制限手段(10)と
を含み、
過電流保護のための電流検出手段(5)と前記フィードバック制御のための電流検出手段(5)とを共用し、
前記過電流保護のための設定値を、前記電流指令の最大値と前記フィードバック制御する電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータ(4)または前記インバータ(3)の最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定したモータ制御装置。 - インバータ(3)からの出力をモータ(4)に供給してモータ(4)を駆動するとともに、インバータ(3)を制御するための電流検出機能および過電流保護機能を有するモータ制御装置であって、
DCリンクから電流検出した電流値に基づいて過電流保護を行う過電流保護手段(5)と、
電流検出した電流値に基づいて、モータ相電流をフィードバック制御するための電流指令の最大値を補正する補正手段(30)と
を含み、
前記過電流保護のための設定値を、前記電流指令の最大値と前記フィードバック制御する電流制御系の最大オーバーシュート電流とを加算した値に設定し、少なくとも前記モータ(4)または前記インバータ(3)の最大電流を前記過電流保護のための設定値に対して前記電流検出のばらつきで増加する上限値に設定したモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011054314A JP5321622B2 (ja) | 2011-03-11 | 2011-03-11 | モータ制御方法およびその装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011054314A JP5321622B2 (ja) | 2011-03-11 | 2011-03-11 | モータ制御方法およびその装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001300128A Division JP5124899B2 (ja) | 2001-09-28 | 2001-09-28 | モータ制御方法およびその装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011120471A JP2011120471A (ja) | 2011-06-16 |
| JP2011120471A5 JP2011120471A5 (ja) | 2011-07-28 |
| JP5321622B2 true JP5321622B2 (ja) | 2013-10-23 |
Family
ID=44285078
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011054314A Expired - Fee Related JP5321622B2 (ja) | 2011-03-11 | 2011-03-11 | モータ制御方法およびその装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5321622B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102545159A (zh) * | 2012-01-13 | 2012-07-04 | 马建如 | 一种无刷直流电机缺相短路保护装置 |
| JP5630494B2 (ja) | 2012-11-08 | 2014-11-26 | ダイキン工業株式会社 | 電力変換装置 |
| JP2017051070A (ja) * | 2015-09-04 | 2017-03-09 | ファナック株式会社 | Dcリンク電流検出機能を有するモータ駆動装置 |
| CN106849014B (zh) * | 2017-03-23 | 2019-10-08 | 马鞍山思卡瑞自动化科技有限公司 | 一种电机安全控制电路系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08322300A (ja) * | 1994-08-11 | 1996-12-03 | Meidensha Corp | 誘導電動機のベクトル制御装置 |
| JPH08163900A (ja) * | 1994-12-05 | 1996-06-21 | Nissan Motor Co Ltd | 誘導モータ制御装置 |
| JP4512211B2 (ja) * | 1999-01-25 | 2010-07-28 | 株式会社日立産機システム | 電流制御回路、インバータ制御装置、インバータ装置、および電力変換装置 |
| JP3546786B2 (ja) * | 1999-12-15 | 2004-07-28 | 株式会社日立製作所 | 空気調和機 |
-
2011
- 2011-03-11 JP JP2011054314A patent/JP5321622B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011120471A (ja) | 2011-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9455652B2 (en) | Motor drive | |
| EP2979356B1 (en) | Motor drive circuit and method of driving a motor | |
| KR100798511B1 (ko) | 인버터장치 및 그 전류제한방법 | |
| EP2725705A1 (en) | Motor control device and electric power steering device using same | |
| JP6107936B2 (ja) | 電力変換装置 | |
| JP5880420B2 (ja) | インバータ装置 | |
| WO2012160694A1 (ja) | モータ制御装置 | |
| JP2014064430A (ja) | 電動パワーステアリング装置 | |
| US10298162B2 (en) | Brushless-motor drive apparatus | |
| JP5321622B2 (ja) | モータ制御方法およびその装置 | |
| JP5124899B2 (ja) | モータ制御方法およびその装置 | |
| CN110574281A (zh) | 电动机的控制装置及电动助力转向系统 | |
| CN111418144B (zh) | 电动机的控制方法以及电动机的控制装置 | |
| JP2002238299A (ja) | インバータの故障検出方式 | |
| US12081155B2 (en) | Motor control device and abnormality detection method for current detector provided in motor control device | |
| JP6879188B2 (ja) | 駆動装置の異常判定装置 | |
| JP2013123288A (ja) | 電動機の制御装置 | |
| JP5595436B2 (ja) | モータ制御装置 | |
| WO2013094330A1 (ja) | 電力変換装置 | |
| JP4682746B2 (ja) | 電動機の制御装置 | |
| JP5325556B2 (ja) | モータ制御装置 | |
| JP2014138435A (ja) | 電力変換器制御装置 | |
| JP5555301B2 (ja) | 可変速発電電動機システム | |
| JP5595437B2 (ja) | モータ制御装置 | |
| JP2012130248A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110408 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110607 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130402 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130603 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130701 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5321622 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |