JP5309294B2 - ジョイスティック - Google Patents
ジョイスティック Download PDFInfo
- Publication number
- JP5309294B2 JP5309294B2 JP2009552090A JP2009552090A JP5309294B2 JP 5309294 B2 JP5309294 B2 JP 5309294B2 JP 2009552090 A JP2009552090 A JP 2009552090A JP 2009552090 A JP2009552090 A JP 2009552090A JP 5309294 B2 JP5309294 B2 JP 5309294B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- joystick
- plane
- joint
- spring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000003638 chemical reducing agent Substances 0.000 claims description 8
- 230000009471 action Effects 0.000 claims description 5
- 230000008878 coupling Effects 0.000 claims description 2
- 238000010168 coupling process Methods 0.000 claims description 2
- 238000005859 coupling reaction Methods 0.000 claims description 2
- 230000004044 response Effects 0.000 claims description 2
- 230000001133 acceleration Effects 0.000 description 3
- 238000010924 continuous production Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/12—Hand levers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
- B62D5/006—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback power actuated
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G5/00—Means for preventing, limiting or returning the movements of parts of a control mechanism, e.g. locking controlling member
- G05G5/03—Means for enhancing the operator's awareness of arrival of the controlling member at a command or datum position; Providing feel, e.g. means for creating a counterforce
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/04766—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks providing feel, e.g. indexing means, means to create counterforce
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20256—Steering and controls assemblies
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20576—Elements
- Y10T74/20582—Levers
- Y10T74/20612—Hand
- Y10T74/20618—Jointed
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Control Devices (AREA)
- Position Input By Displaying (AREA)
Description
Claims (12)
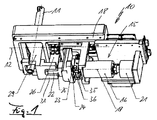
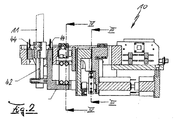
- 2自由度を有している継手によって種々の方向へ動かすことのできるアクチュエータ(11)を有しており、それによって第一の平面内で生じる前記アクチュエータ(11)の前後の動きが電動機(16)及び減速機の形をとる能動的力フィードバックを受け、前記第一の平面に垂直な第二の平面内で生じる前記アクチュエータ(11)の前後の動きがばね作用復帰装置の形をとる受動的力フィードバックを受け、前記減速機(23、24)の出力が、前記前後の動きの方向へ前記第一の平面内で一緒に動く様に前記アクチュエータ(11)に接続されている継手部(29)に、前記減速機(23、24)の出力側に連結されている回動レバー(25)を接続する板ばね装置(26、28)を経由して、前記アクチュエータ(11)に接続されている、機械及び/または車両の機能を制御するためのジョイスティック(10)。
- 前記電動機(16)の出力軸に回転不能に支持されており、且つ前記回動レバー(25)に取り付けられている内歯環状歯車セグメント(24)に作用する、歯車(23)を前記減速機が有している、請求項1に記載のジョイスティック。
- 前記電動機(16)の出力軸に摩擦車(35)が回転不能に搭載されており、二つのばねで支持されているブレーキパッドつまり摩擦パッド(36)を前記摩擦車に押し付け可能である、請求項1または2に記載のジョイスティック。
- 前記ブレーキパッド(36)が、調節ねじ(37)によって軸の周りへ付勢されているばねによって作用させられている、請求項3に記載のジョイスティック。
- 前記回動レバー(25)が延長アーム(22)を有しており、この延長アーム(22)に第一の板ばね(26)が取り付けられており、第二の板ばね(28)が取り付けられている構成要素(27)に前記第一の板ばね(26)がその反対端部において接続されており、前記第二の板ばね(26)がその反対端部において前記継手部(29)に接続されている、請求項1〜4の何れか一項に記載のジョイスティック。
- 前記回動レバー(25)の軸が前記アクチュエータ(11)の回転軸(12)内に位置づけられている、請求項5に記載のジョイスティック。
- 前記継手部(29)の軸が前記アクチュエータ(11)の回転軸(12)内に位置づけられている、請求項5または6に記載のジョイスティック。
- 前記アクチュエータ(11)が動きの一つの平面内で前記継手部(29)に固定的に結合されている、請求項1〜7の何れか一項に記載のジョイスティック。
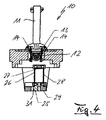
- 前記アクチュエータ(11)が、ばね弾性方式で前後に回動することができる様に、動きの別の平面内で前記継手部(29)に支持されている、請求項1〜8の何れか一項に記載のジョイスティック。
- 前記アクチュエータ(11)が板ばね(42)によって前記継手部(29)に支持されている、請求項9に記載のジョイスティック。
- 直径方向に磁化されておりホール感知器(14)と連係する環状磁石(13)が前記アクチュエータ(11)の回転軸(12)上の一つの平面内に配置されている、請求項1〜10の何れか一項に記載のジョイスティック。
- 前記アクチュエータ(11)の動きに応答して、前記継手部(29)上に配置されているホール感知器(44)と連係する永久磁石が、前記アクチュエータ(11)上に設けられている、請求項1〜11の何れか一項に記載のジョイスティック。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007012278A DE102007012278A1 (de) | 2007-03-09 | 2007-03-09 | Joystick |
| DE102007012278.2 | 2007-03-09 | ||
| PCT/EP2008/001396 WO2008110255A1 (de) | 2007-03-09 | 2008-02-22 | Joystick |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010521027A JP2010521027A (ja) | 2010-06-17 |
| JP2010521027A5 JP2010521027A5 (ja) | 2013-04-04 |
| JP5309294B2 true JP5309294B2 (ja) | 2013-10-09 |
Family
ID=39322384
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009552090A Expired - Fee Related JP5309294B2 (ja) | 2007-03-09 | 2008-02-22 | ジョイスティック |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8100030B2 (ja) |
| EP (1) | EP2117905B1 (ja) |
| JP (1) | JP5309294B2 (ja) |
| AT (1) | ATE474760T1 (ja) |
| DE (2) | DE102007012278A1 (ja) |
| WO (1) | WO2008110255A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103026322B (zh) | 2010-05-18 | 2017-10-31 | 希科泰克股份有限公司 | 用户接口设备、装置和方法 |
| US10121617B2 (en) | 2010-08-20 | 2018-11-06 | SeeScan, Inc. | Magnetic sensing user interface device methods and apparatus |
| JP5577211B2 (ja) * | 2010-10-05 | 2014-08-20 | アルプス電気株式会社 | 力覚付与型多方向入力装置 |
| WO2012051357A1 (en) | 2010-10-12 | 2012-04-19 | Mark Olsson | Magnetic thumbstick user interface devices |
| US9134817B2 (en) | 2010-11-08 | 2015-09-15 | SeeScan, Inc. | Slim profile magnetic user interface devices |
| EP2671129B1 (en) | 2010-12-02 | 2016-03-09 | SeeScan, Inc. | Magnetically sensed user interface apparatus and devices |
| US9678577B1 (en) | 2011-08-20 | 2017-06-13 | SeeScan, Inc. | Magnetic sensing user interface device methods and apparatus using electromagnets and associated magnetic sensors |
| US8924098B2 (en) * | 2012-03-27 | 2014-12-30 | Topcon Positioning Systems, Inc. | Automatic control of a joystick for dozer blade control |
| US8834272B2 (en) | 2012-09-28 | 2014-09-16 | Wms Gaming, Inc. | Dynamically reconfigurable joystick |
| JP5995366B2 (ja) * | 2013-02-15 | 2016-09-21 | アルプス電気株式会社 | 力覚付与型平面スライド入力装置 |
| KR101488209B1 (ko) * | 2013-05-09 | 2015-01-30 | 신준협 | 조이스틱을 이용한 위치제어장치 |
| WO2014186806A1 (en) | 2013-05-17 | 2014-11-20 | SeeScan, Inc. | User interface devices |
| US9501084B1 (en) * | 2013-10-10 | 2016-11-22 | SD Technologies, LLC | Wearable electronic device with force feedback |
| JP6239755B2 (ja) * | 2013-12-04 | 2017-11-29 | インテル コーポレイション | ウェアラブルなマップ及び画像ディスプレイ |
| US9435101B2 (en) | 2014-04-24 | 2016-09-06 | Topcon Positioning Systems, Inc. | Semi-automatic control of a joystick for dozer blade control |
| DE102019115329B4 (de) * | 2019-06-06 | 2021-03-25 | Grammer Aktiengesellschaft | Manuell bedienbare Steuervorrichtung |
| CN115155053A (zh) | 2022-05-10 | 2022-10-11 | 深圳市拳霸科技开发有限公司 | 一种可拆卸式游戏摇杆及其拆卸收纳方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4275611A (en) * | 1979-03-29 | 1981-06-30 | Atari, Inc. | Joystick controller |
| US4607159A (en) * | 1983-12-27 | 1986-08-19 | North American Philips Consumer Electronics Corp. | Optical joystick controller with intersecting spring means |
| US4723458A (en) * | 1986-08-29 | 1988-02-09 | N.V. Industrie-En Handelmaatschappi | Control mechanism |
| JPH0613654Y2 (ja) * | 1987-09-04 | 1994-04-13 | 三菱農機株式会社 | 作業車輌におけるレバー装置 |
| JPH06102950A (ja) * | 1991-02-25 | 1994-04-15 | Sony Corp | 制御レバー装置 |
| DE4209668A1 (de) * | 1992-03-25 | 1993-09-30 | Rexroth Mannesmann Gmbh | Steuergerät, insbesondere zur Fernbedienung von hydraulischen Komponenten |
| US6002351A (en) * | 1995-11-10 | 1999-12-14 | Nintendo Co., Ltd. | Joystick device |
| US6639581B1 (en) * | 1995-11-17 | 2003-10-28 | Immersion Corporation | Flexure mechanism for interface device |
| DE19713245C2 (de) * | 1997-03-29 | 2001-02-15 | Mercedes Benz Lenkungen Gmbh | Kraftfahrzeug mit zumindest einem über wenigstens einen Bedienhebel in Form eines sogenannten Side-stick steuerbaren Teil |
| US5969520A (en) * | 1997-10-16 | 1999-10-19 | Sauer Inc. | Magnetic ball joystick |
| US6104382A (en) * | 1997-10-31 | 2000-08-15 | Immersion Corporation | Force feedback transmission mechanisms |
| JPH11154029A (ja) | 1997-11-20 | 1999-06-08 | Kayaba Ind Co Ltd | 操作装置 |
| US6573885B1 (en) * | 1999-03-22 | 2003-06-03 | Logitech Europe S.A. | Folded gear drive force feedback mechanism with direct drive sensors |
| JP2001290594A (ja) * | 2000-02-02 | 2001-10-19 | Next:Kk | レバー式操作装置 |
| US6429849B1 (en) * | 2000-02-29 | 2002-08-06 | Microsoft Corporation | Haptic feedback joystick |
| JP2002149256A (ja) * | 2000-11-13 | 2002-05-24 | Sensatec Co Ltd | スティックコントローラ |
| JP2002160642A (ja) * | 2000-11-28 | 2002-06-04 | Honda Motor Co Ltd | 車両の運転操作装置 |
| JP4868105B2 (ja) * | 2001-09-14 | 2012-02-01 | トヨタ自動車株式会社 | 運転操作装置 |
| JP3852381B2 (ja) | 2001-11-29 | 2006-11-29 | トヨタ自動車株式会社 | 車両操作装置 |
| JP3897293B2 (ja) | 2002-07-08 | 2007-03-22 | 本田技研工業株式会社 | 車両の運転操作装置 |
| US20050057031A1 (en) * | 2003-08-01 | 2005-03-17 | Bruce Ahnafield | Joystick-operated driving system |
| DE10343141A1 (de) | 2003-09-18 | 2005-04-21 | Daimler Chrysler Ag | Vorrichtung zur Kompensation des Spiels eines Bedienelements |
| JP2005332039A (ja) * | 2004-05-18 | 2005-12-02 | Alps Electric Co Ltd | 力覚付与型入力装置 |
-
2007
- 2007-03-09 DE DE102007012278A patent/DE102007012278A1/de not_active Ceased
-
2008
- 2008-02-22 AT AT08715948T patent/ATE474760T1/de active
- 2008-02-22 JP JP2009552090A patent/JP5309294B2/ja not_active Expired - Fee Related
- 2008-02-22 US US12/449,251 patent/US8100030B2/en active Active
- 2008-02-22 DE DE502008000991T patent/DE502008000991D1/de active Active
- 2008-02-22 EP EP08715948A patent/EP2117905B1/de active Active
- 2008-02-22 WO PCT/EP2008/001396 patent/WO2008110255A1/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010521027A (ja) | 2010-06-17 |
| DE102007012278A1 (de) | 2008-09-18 |
| US8100030B2 (en) | 2012-01-24 |
| US20100011903A1 (en) | 2010-01-21 |
| ATE474760T1 (de) | 2010-08-15 |
| EP2117905B1 (de) | 2010-07-21 |
| DE502008000991D1 (en) | 2010-09-02 |
| WO2008110255A1 (de) | 2008-09-18 |
| EP2117905A1 (de) | 2009-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5309294B2 (ja) | ジョイスティック | |
| JP2010521027A5 (ja) | ||
| EP1698538B1 (en) | Haptic feedback device | |
| KR101145533B1 (ko) | 능동형 가속페달의 엑츄에이터 장치 | |
| EP2572959B1 (en) | Steering apparatus for vehicle | |
| CN106536327B (zh) | 机电动力转向系统 | |
| JP2002023872A (ja) | 制御信号を発生する非接触式ペダル位置センサを備えたペダル組立体 | |
| CN113039116A (zh) | 反作用力产生装置和转向装置 | |
| CN107021131A (zh) | 转向装置 | |
| JP4894413B2 (ja) | ステアリング装置 | |
| JP4835952B2 (ja) | 車両用ドアロック駆動装置 | |
| JPH0730455Y2 (ja) | 車輌用操舵装置 | |
| JP6581235B1 (ja) | リンク機構 | |
| JP2014078174A (ja) | 車両用ペダル装置 | |
| CN107339415B (zh) | 线控换挡执行器及换挡装置 | |
| US9823686B1 (en) | Three-axis motion joystick | |
| KR100927695B1 (ko) | 능동형 페달 장치 | |
| JP2008309516A (ja) | 張力センサおよび同張力センサを採用した車両用電動パーキングブレーキ装置 | |
| JP5071841B2 (ja) | 油圧アクチュエータの操作用レバー装置 | |
| JP2000326754A (ja) | 自動車用アクセルペダル装置 | |
| JP4248390B2 (ja) | ステアリング操作装置 | |
| US6816770B1 (en) | Direction and speed control device for a motor vehicle | |
| JP2015216038A (ja) | 操作レバー装置 | |
| TWI851788B (zh) | 接收駕駛者之油門操作的油門握柄裝置 | |
| JP2014031035A (ja) | 原動機付き鞍乗型車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100917 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120821 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121114 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121121 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121220 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121228 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130118 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130125 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20130214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130517 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130614 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5309294 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |