本発明は、電子写真プロセス、静電記録プロセス、磁気記録プロセス等の画像形成プロセスを用いて記録材に画像を形成する複写機、プリンタ、ファクシミリ装置及びワードプロセッサー等の画像形成装置に用いる定着装置に関する。
従来、電子写真プロセス等の画像形成プロセスを用いて記録材に画像を形成する画像形成装置は、未定着画像(トナー画像)が形成された記録材を加熱する画像加熱装置としての定着装置を備えている。この定着装置に用いられる代表的な定着方式としては、熱ローラ方式やフィルム加熱方式が知られている。
熱ローラ方式の定着装置は、加熱体としてハロゲンランプ等を使用し、所定の温度範囲内に温度制御された加熱ローラと、この加熱ローラに記録材を密着させる加圧ローラとを有している。
更に、この加熱ローラ、加圧ローラはともに金属パイプ上にゴム等の弾性体層を有している。そして、前記加熱ローラと加圧ローラとで記録材を挟持搬送しつつ、この記録材に圧力と熱を付与することで、記録材上に形成されている未定着画像を定着させている。
また、フィルム加熱方式の定着装置は、加熱体としてセラミックヒータを内包し、加熱体に対向圧接しつつ搬送される耐熱フィルムからなる加熱ユニットと、この加熱ユニットに記録材を密着させる加圧部材とを有している。
更に、この耐熱フィルム表面および加圧部材表面にゴム等の弾性体層を有する構成も実用化されている。そして、前記加熱ユニットと加圧部材とで記録材を挟持搬送しつつ、前記加熱体の熱を耐熱フィルムを介して記録材へ付与することで、記録材上に形成されている未定着画像を定着させている。
上述した代表的な定着装置においては、加熱ローラと加圧ローラ及び加熱ユニットと加圧部材は圧接することで両者間に圧接ニップ部が形成され、この圧接ニップ部で圧力と熱を記録材に与えることで未定着画像を定着する。なお、この定着させるための圧力は数N〜数十Nとなっている。
このような構成の定着装置で記録材を定着中に、何らかの原因でジャムが発生した場合には、記録材が圧接ニップ部で挟持されている状態であるため、ジャムした記録材を取り除くのが著しく困難である。
また、各定着装置の各圧接ニップ部では数N〜数十Nの荷重が加えられているため、長期間放置されると、圧接ニップ部の弾性体層に永久変形が生じ、圧接ニップ部の荷重を開放しても弾性体層の変形が元に戻らなくなってしまうことがある。
これらを防止するために画像形成時以外においても定着装置を定期的に回転させる手法がある。また、ジャムした記録材を取り除きやすくするために圧接ニップ部の挟持状態を解除する手動レバーを備える構成もある。
しかしながら、定期的に回転させる構成では、装置本体の電源を切っている状態では定着装置を定期的に回転させることはできない。また手動レバーを備える構成では、ユーザのレバー戻し忘れ等が発生する可能性がある。これらを回避するために以下の構成が開示されている。
特許文献1には、定着装置が有する弾性体層に永久変形が生じるのを防止し、また定着装置にジャムした記録材を容易に取り除くことが出来るようにすることを目的とし、圧接ニップ解除にモータを用い、定着装置の圧力を解除する構成が開示されている。
しかしながら、上述した特許文献1の技術においては、圧接ニップ解除用に設けられたカムの位置決めを圧接ニップの形成を行う加圧部材で行っている。この加圧部材はその機能上、位置は不安定である。
すなわち、上述した従来の技術においては、圧接ニップ解除用カムの位置制御を正確に行うことが難しいという事情がある。
本発明の技術的課題は、前記のような事情に鑑みてなされたものであり、その目的は、装置の高コスト化及び大型化を招くことなく、圧接ニップ解除用カムの正確な位置制御を行うことができる定着装置を提供することにある。
前記目的を達成するため、本発明に係る定着装置の代表的な構成は、未定着画像を担持する記録材を挟持搬送する定着ニップ部を形成するニップ部形成部材と、前記定着ニップ部に圧力を掛ける圧力付与機構と、前記圧力付与機構に作用するカム部材を有し前記カム部材の回転により前記定着ニップ部に作用する圧力を変更する圧力変更機構と、を有する定着装置において、前記カム部材には、前記装置に設けられた前記圧力付与機構とは別部品である位置決め部と当接する回転止め部と、前記カム部材を駆動するモータからの動力を遮断するワンウェイクラッチと、が設けられており、前記回転止め部と前記位置決め部の少なくとも一方が両者の当接により弾性変形し退避する構造となっており、前記カム部材が前記ワンウェイクラッチ内の摩擦による空回転トルクにより一方の方向に回転すると前記回転止め部が前記位置決め部に突き当たり前記ワンウェイクラッチの作用により前記カム部材のそれ以上の回転が止められて前記カム部材の位相が決まり、前記カム部材が前記モータからの動力により他方の方向に回転すると前記退避可能な構造により前記回転止め部が前記位置決め部を乗り越えて前記カム部材が回転できる構成となっていることを特徴とする。
本発明によれば、装置の高コスト化及び大型化を招くことなく、圧接ニップ解除用カムの正確な位置制御を行うことができる。
以下、本発明の実施の形態を図面に基づいて詳細に説明する。ただし、以下の実施形態に記載されている構成部品の寸法、材質、形状、それらの相対配置などは、本発明が適用される装置の構成や各種条件により適宜変更されるべきものである。従って、特に特定的な記載がない限りは、本発明の範囲をそれらのみに限定する趣旨のものではない。
本発明の第1実施形態について図1から図8に基づいて説明する。なお、本実施形態では、画像加熱装置として、画像形成装置における定着ユニットを例示している。また、画像形成装置としては、レーザビームプリンタを例示している。
図1は、本発明の一実施の形態に係る定着ユニットへの動力伝達手段および経路を示す斜視図である。図2は、定着ユニットへの動力伝達手段および経路を示す略断面図である。図3は、定着ユニットが圧接ニップを形成し通常動作時の略断面図である。
図4は、定着ユニットが圧接ニップを解除した状態の略断面図である。図5は、非解除状態へのカムの動きを示すカム近傍詳細図である。図6は、圧接ニップ状態とセンサ検知状態のタイミングを示す略図である。図7は画像形成装置の概略構成断面図である。図8は定着ユニットの概略構成断面図である。
まず、記録材Sの流れに沿って概略的な構成を説明する。図7に示すように、装置本体Eは電子写真方式によって画像を形成するものであり、給送搬送手段1によって記録材Sを画像形成手段2へ搬送してトナー像を転写し、その記録材Sを定着手段3へ搬送してトナー定着したあと、排出部へと排出するものである。
具体的には、装置下部に記録材Sを積載収納するカセット11が装填されている。給送搬送手段1を構成するカセット11内に積載収納されている記録材Sが、時計回り方向に回転する給送ローラ12によって最上位の記録材から順に繰り出され、搬送ローラ対13,14により画像形成手段2に送られる。
画像形成手段2の近傍には記録材の通過を検知するセンサレバー15、フォトインタラプタ16が設けられている。フォトインタラプタ16は光透過型であり、発光側と受光側の間にセンサレバー15の遮光部が位置し、記録材がセンサレバー15を回動させることによって遮光部が退避し記録材を検知する。
また、センサレバー15は弾性部材(不図示)により付勢されていることにより、記録材が通過し終わると初期位置に戻る。この記録材Sの通過を検知した後、所定時間経過後にレーザースキャナ21によって、画像情報に応じたレーザー光が反時計回り方向に回転している感光体22上に照射され、感光体22上には静電潜像が形成される。
この静電潜像はプロセスカートリッジP内の現像部にてトナー現像される。感光体22上に形成されたトナー画像は、転写ローラ24により未定着画像として記録材Sに転写される。未定着画像を担持した記録材Sは、定着手段3に送られ、定着手段3における定着ユニットTにて定着処理がなされる。
定着手段3を通過して定着処理を終えた記録材Sは排出搬送ローラ対33により搬送され、装置上部の排出部に排出される。なお、図7において、4は装置の電源部および装置を制御する制御基板を有する電装部である。
記録材Sの表裏両面記録時について説明する。記録材Sの両面に記録を行う場合には、前記定着手段3を通過して表面側に画像記録された記録材Sを排出搬送ローラ対33の逆転駆動および搬送ローラ31によりスイッチバック搬送する。更に前記記録材Sを搬送ローラ対41,42により再び画像形成手段2に搬送する。そして前述と同様に記録材Sの裏面側に画像記録を行った後に排出される。
手差し給送部5から給送を行う場合には、手差しトレイ51を開放し、手差しトレイ51上に記録材Sを積載する。この手差しトレイ51に積載された記録材Sが反時計回り方向に回転する手差し給送ローラ52によって最上位の記録材から順に繰り出され、搬送ローラ対14により画像形成手段2に送られる。画像形成手段2に送られた後は前述と同様のため省略する。
本実施形態における定着ユニットTの構成ついて図8を用いてより詳しく説明する。
図8に示す定着ユニットTにおいて、ヒータ70は、アルミナまたは窒化アルミからなるセラミック基板上に銀合金からなる通電発熱体、通電電極等をスクリーン印刷した加熱体である。
通電発熱体はAC通電制御回路に接続されている。ヒータ70上には温度検知手段であるサーミスタ71が取り付けられており、ヒータ70の温度検知を行う。また、ヒータ70上にはサーモプロテクタであるところの温度ヒューズまたはサーモスイッチ72が設けられており、通電発熱体と直列にAC電源に接続されている。
定着フィルム73は、円筒状のポリイミド樹脂またはステンレスにシリコンゴム、フッ素ゴム等からなる弾性体ゴム層およびフッ素系樹脂が形成されている。または、弾性体ゴム層のない構成の定着フィルム73もある。
この定着フィルム73内に、PPS、PEEK、液晶ポリマー等の耐熱樹脂から形成されヒータ70を支持するフィルムガイド74、ヒータ70、補強板75が内装され、加熱ユニットを構成している。
加圧ローラ38は、アルミ、鉄等からなる軸にシリコンゴム、フッ素ゴム等からなる弾性層を形成した加圧部材である。定着フィルム73は定着フィルム73の長手方向両端部に対向するように配置されたフランジ60,61の外周面または内周面により走行軌跡を規制されている。
本実施形態においてはフランジの内周面で定着フィルムの長手方向への移動、及び定着フィルム両端部の走行軌跡を規制している。定着フィルム73の内面に電圧を印加するため、または定着フィルム73を接地するための接点バネ76、定着フィルム73の内面の温度検知を行うための内面サーミスタ77が弾性を有する構成で定着フィルム73の内面に当接し、定着フィルムと摺動している。
定着フィルム73内にフィルムガイド74、ヒータ70、補強板75などが内装された加熱ユニットと加圧ローラ38は、後述の圧力付与機構により圧力が付与されることで加熱ニップ部としての圧接ニップ部(加熱ニップ部)Nを形成する。この圧接ニップ部Nを記録材Sが通過することによって、記録材S上の未定着画像が定着される。
次に、圧接ニップ部Nを形成するための加圧構成について図1から図5及び図8を用いて説明する。加圧ローラ(ニップ部形成部材)38の両軸部は定着ユニットT内に固定された定着側板(不図示)に回転可能にそれぞれ支持されている。
加熱ユニットは加圧ローラ38との圧接方向に移動可能に定着側板(不図示)によって支持されている。この加熱ユニットのフランジ60,61を加圧板(圧力付与機構の一部)65,66で荷重することにより圧接ニップ部Nを形成する。
加圧板65,66の一端部は定着ユニットTのフレームの一部である定着上板64に掛けてあり、フランジ60,61を荷重する加圧バネ(圧力付与機構の一部)62,63が定着上板64と加圧板65,66との間に設けられている。
定着ユニットTは上述の他に、加熱ユニットと加圧ローラ38の記録材搬送方向の下流近傍に、記録材に接触する回転体としての搬送ローラ31を有する。定着ユニットTは、装置本体Eに固定されたステー39に着脱可能に取り付けられており、レバー67,68を動作させることでユーザによって容易に着脱可能である。
なお、加熱ユニットの両端部近傍に位置するフランジ60,61、加圧板65,66、加圧バネ62,63、および加圧ローラ38の両端部近傍に位置するレバー67,68については、一端側のみの図示しており、他端側は図示していない。
このように、圧接ニップ部Nを形成するための圧力を掛ける圧力付与機構は、前述した定着上板64、加圧バネ62,63、加圧板65,66など圧力付与に関わる部材によって構成されている。なお、圧力付与機構は、前述した構成に限定されるものではない。圧力付与機構は、圧接ニップ部Nを形成するための圧力を掛ける構成であれば、その他の構成であっても良い。
<定着ユニットの動作>
次に本実施形態における定着ユニットの画像形成時および圧接ニップ解除/非解除動作時について説明する。
図1及び図2に示すように、定着ユニットTは駆動源としてのモータ180によって駆動される。このモータ180は正回転および逆回転の可能なDCモータやステッピングモータなどが用いられる。モータ180の動力は装置本体Eに設けられたギア181〜184により定着ユニットTへ伝達される。定着ユニットTにはギア185〜187が設けられユニット化されている。
また、モータ180の駆動力はギア181を介してギア195〜198により装置本体Eへ伝達される。定着ユニットTへの駆動伝達経路は定着ユニットTの一端側のみに設けられた1種類のギア列しかなく、モータの正回転時および逆回転時は同一のギア列で定着ユニットTへ動力を伝達する。従って、定着ユニットTの駆動用および圧接ニップ解除用にそれぞれ別にギア列を設ける必要がない。
定着ユニットTは、圧接ニップ部Nに掛かる圧力を変更する圧力変更機構を有している。圧力変更機構は圧力付与機構に作用するカム部材としてのカム191,192を有しており、カム191,192の回動により圧接ニップ部Nに掛かる圧力を変更できる。
本実施形態のカム部材191,192は圧力付与機構の一部である加圧板65,66に作用する。本実施形態では、圧力変更機構は、前記カム191,192のほか、加圧ローラ38を駆動するモータ180など圧力変更に関わる部材によって構成されている。
以下、詳しく説明する。なお、圧力変更機構は、前述した構成に限定されるものではない。圧力変更機構は、前記圧力付与機構に作用するカム191,192を有し、前記カム191,192の回動により前記圧接ニップ部Nに掛かる圧力を変更する構成であれば、その他の構成であっても良い。
前記圧力付与機構に作用するカム部材としてのカム191,192はワンウェイクラッチ(ワンウェイクラッチ機構)を有し、定着ユニットTに設けられており記録材と接触する回転体の回転軸に設けられている。
本実施形態では、カム191,192は、記録材搬送方向において前記圧接ニップ部Nとは異なる位置に設けられた、前記搬送ローラ31の回転軸32上に設けられている。従って、モータ180の正回転時(矢印a方向)には搬送ローラ31の回転軸32からカム191,192へはワンウェイクラッチの空転トルクのみが伝達される。そして、モータ180の逆回転時(矢印b方向)には搬送ローラ31の回転軸32からカム191,192へはワンウェイクラッチがロックすることにより動力が伝達される。
なお、ここでいうモータ180の正回転時とは搬送ローラ31が記録材を排出する方向(記録材搬送方向)に回転する時であり、モータ180の逆回転時とは搬送ローラ31が前記記録材搬送方向とは逆方向へ回転する時である。
このように両側のカム191,192への動力伝達は搬送ローラ31の回転軸を用いて行う。このようにカム191,192への動力伝達に搬送ローラ31の回転軸32を用いるために、カム191,192に動力を伝達する部材を新たに設ける必要がない。
カム191,192は加圧板65,66の位置を制御するカム面191a,192aを有する。また、カム191,192は圧接ニップ部Nの状態を検出/制御するためのカム面191b,192bを有する。さらに、カム191,192は位置決めを行うために設けられた回転止め部191c,192cと、定着ユニットTに設けられた後ろ板190の位置決め部190a,190bにより初期位置が決められる。この回転止め部191c,192cはスナップフィット構成で弾性力を有しており、加圧板65,66および位置決め部190a,190bとの接触時には退避可能な構成となっている。
位置決め部190a,190bを装置本体Eに設けるのではなく、定着ユニットT内の後ろ板190に共に設けているため精度の良いカムの位置決め及び両側のカム191,192の位相合わせが可能となる。尚、本実施例では位置決め部190a,190bを定着ユニットT内の後ろ板190に設けているが、定着ユニットT内に固定されている構成であるならば、他の構成でも精度の良いカムの位置決め及び両側のカム191,192の位相合わせが可能となる。
このように、回転止め部を設け弾性体とすることで、正回転時にはカムの正確な位置決めが可能であり、逆回転時にはカムの回動を妨げないため、省スペースかつ低コストな構成でカムの正確な位置制御が出来る。
このカム191,192のカム面191b,192bと、カムセンサレバー194,199、カムセンサ193及び装置本体Eの電装部(制御部)4により圧接ニップ部Nの解除/非解除の制御を行う。カムセンサ193は透過型センサであり、発光部と受光部間をカムセンサレバー194の遮光部で遮光/非遮光を行うことで圧接ニップ部Nの解除/非解除の状態を検知する。
また、カムセンサレバー199はカムセンサレバー194と係合しカム192の状態を検知する構成であり、カムセンサ193はカム191,192の少なくともどちらか一方が解除状態であることを検出可能である。カムセンサレバー194,199、カムセンサ193は定着ユニットT内に設けられている。
定着ユニットT内の圧接ニップ部Nの状態を検知するセンサ構成を、装置本体Eに設けるのではなく定着ユニットT内に設けているため、装置本体を大きくすることなく、さらにはセンサでの圧接ニップ部Nの状態検出精度が向上している。
<画像形成時の動作>
図2および図3に示すように、画像形成時にはモータ180が矢印a方向へ回転し、ギア181〜184により動力が加圧ローラ38及び搬送ローラ31へ伝達される。加圧ローラ38、搬送ローラ31は正回転方向(矢印a方向)に回転することで、記録材上の未定着画像の定着および記録材の搬送を行う。
この時、加熱ユニットが定着上板64、加圧バネ62,63、加圧板65,66により加圧ローラに対して加圧されることで圧接ニップ部Nを形成している。
前述したように、本実施形態のカム191,192はワンウェイクラッチ(ワンウェイクラッチ機構)を介して搬送ローラ31の回転軸32に取り付けられている。後述するが、このカム191,192は、搬送ローラ31の回転軸32が矢印b方向に回転する時のみ加圧バネ62,63の力に抗して加圧板65,66を持ち上げるように回動する。
搬送ローラ31の回転軸32が矢印a方向へ回転する時にはワンウェイクラッチ内の摩擦により空回転トルクが発生する。この空回転トルクによりカム191,192も矢印a方向への回転力が発生する。
このカム191,192の矢印a方向への回転力は、回転止め部191c,192cと、位置決め部190a,190bとにより止められ両側のカムは初期位置となる。
このように、モータ180が矢印a方向へ回転すると、モータ回転開始時のカム191,192の位相が初期位置の場合、カム191,192は回動しない。
しかしながら、モータ回転開始時のカム191,192の位相が初期位置より矢印b方向へずれていた場合(位相がずれている場合も含む)は、カム191,192に対してワンウェイクラッチの空回転トルクが伝達し、位相が初期位置になるまでカムは回動する。
このように、位置決め部190a,190bは定着ユニットT内に設けられ、さらに同一部品に設けられている。このため、精度の良いカムの位置決め及び両側のカム191,192の精度良い位相合わせが可能となり、省スペースかつ低コストな構成でカムの正確な位置制御が出来る。
この圧接ニップ部Nの非解除を検出するためにはカム191,192に設けられたカム面191b,192bにカムセンサレバー194,199が当接し、カムセンサ193が受光状態となることで圧接ニップの非解除を検出する。
<圧接ニップ部Nの解除時の動作>
次に圧接ニップ部Nを解除する必要が発生した時には、モータ180が逆回転(矢印b方向)を行う。図2及び図4に示すように、モータ180の逆回転による動力はギア181〜184により定着ユニットTへ伝達される。
逆回転時の動力伝達は、正回転時の動力伝達ギア列と同一のギア列で伝達する。ギア185よりギア187、搬送ローラ31の回転軸32へ伝達された逆回転方向(矢印b方向)の動力はワンウェイクラッチを介してカム191,192へ伝達され、カム191,192は回転する。
カム191,192のカム面191a,192aにより加圧板65,66は加圧バネ62,63の力に抗して移動し、圧接ニップ部Nを解除する。この時,回転止め部191c,192cは加圧板65,66に当接するがスナップフィット構成で弾性体であるため、加圧板65,66によって押され退避し回転を妨げることはない。また、カム191,192の初期位置決めを正確に行っているため、カム191,192の正確な位相制御も可能である。
圧接ニップ部Nを解除したことをカム191,192の位置検出カム面191b,192b、カムセンサレバー194,199、カムセンサ193により検知し、モータ180の回転を止める。圧接ニップ部Nを解除した状態では、加圧ローラ38の弾性体層の永久変形を抑えることができ、また定着ユニットでジャムした記録材を容易に取り除くことが出来る。
したがって本実施形態では、圧接ニップ部の解除は画像形成装置本体の電源をOFFする時及び記録材のジャムが発生した時に自動的に行われる。
<圧接ニップ部Nの解除状態から非解除状態への動作>
圧接ニップ部Nを解除状態から非解除状態へ戻す必要が発生した時には、さらにモータ180を逆回転(矢印b方向)へ回転させる。
モータ180からの動力が伝達されカム191,192は逆回転(矢印b方向)を行い、圧接ニップ部Nは非解除状態(圧接状態)となる。
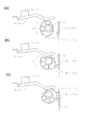
図5に示すように、モータ180の逆回転(矢印b方向)によって搬送ローラ31の回転軸32は一定角速度で矢印b方向に回転し、カム191,192も同一方向、同一角速度で回転する。この時の角速度をω1とする(図5(a))。
カム面191a,192aが加圧板65,66を加圧バネ62,63の力に抗して移動させる領域を過ぎると、加圧バネ62,63の力と加圧板65,66によってカム191,192は矢印b方向に押され回転する。この時のカムの角速度をω2とする(図5(b))。この時の角速度はω2>>ω1となり、カム191,192は加圧バネ62,63と加圧板65,66によって押されることによって発生した慣性力でワンウェイクラッチの空転トルクに抗して回転する。
この慣性力で回転中のカム191,192の回転止め部191c,192cは後ろ板190の位置決め部190a,190bに当接するがスナップフィット構成で弾性体であるため、退避し回転を妨げることはない。このままカム191,192は回転を続け加圧板65,66に当接し止められる(図5(c))。
圧接ニップ部Nが非解除状態に戻ったことをカム191,192の位置検出カム面191b,192b、カムセンサレバー194,199、カムセンサ193により検知し、モータ180の回転を止める。
圧接ニップ部Nが非解除状態になった後にモータ180を正回転(矢印a方向)させることでカム191,192内のワンウェイクラッチの空回転トルクによりカム191,192も矢印a方向へ回転する。そして、回転止め部191c,192cと、位置決め部190a,190bにより両側のカムは初期位置となる。
圧接ニップ部Nの解除は圧力を完全に解除しなくとも軽減することでもよい。これはカム191,192の加圧板位置制御用カム面191a,192aの形状設定により容易に実施できる。また、カム191,192は正確な位相への位置決めおよび両側カムの位相合わせが正確に行われているため、カム面191a,192aの形状設定とカム回転角の制御により加圧力を制御することが可能である。
このように、カム面191a,192aの形状設定により様々な加圧力の異なるパターンを用意し、加圧力を変更することの出来る定着ユニットTも可能である。
<圧接ニップ部Nの解除/非解除検知タイミング>
ここで、図6を用いて圧接ニップ部Nの状態を検知するタイミングについて説明する。圧接ニップ部Nの解除/非解除状態とカム面191b,192b、センサレバー194,199、センサ193による圧接ニップ部Nの検知状態は、図6に示す(1)〜(5)で説明する。
図6に示すように、(1)モータ180の回転(図3の矢印b方向)を開始する。そして、(2)センサ193が解除を検知した後に圧接ニップ部Nの解除動作が開始する。そして、(3)センサ193の解除を検知した後、所定時間後にモータ180の回転を停止する。
この時には圧接ニップ部Nは解除状態である。そして、(4)モータ180の回転(図3の矢印b方向)を開始した後、圧接ニップ部Nが非解除状態となった後にセンサ193が非解除を検知する。
そして、(5)センサ193の非解除を検知した後、所定時間後にモータ180の回転を停止する。この時には圧接ニップ部Nは非解除状態である。このように圧接ニップ部Nの解除状態や解除動作中を検知できる構成となっている。
上述したように、本実施形態によれば、圧接ニップ部Nを形成するための圧力を掛ける圧力付与機構に作用するカム191,192を、定着ユニットTが有する搬送ローラ31の回転軸32に設けている。この構成により、定着ユニットTひいては装置本体Eの高コスト化及び大型化を招くことなく、圧接ニップ部Nに掛かる圧力を変更できる。
また、前記搬送ローラ31と前記カム191,192は、圧接ニップ部Nを形成するニップ部形成部材としての加圧ローラ38を駆動するモータ180の動力で回動するので、駆動源および駆動列を新たに設ける必要がない。このため装置本体E、定着ユニットTは省スペースかつ低コストで構成することが可能である。
さらに、カムの回転止め部を弾性体とすることで、正回転時にはカムの正確な位置決めが可能であり、逆回転時にはカムの回動を妨げなないため、省スペースかつ低コストな構成でカムの正確な位置制御が出来る。
実施形態2
本発明の第2実施形態について図9から図13に基づいて説明する。なお、本実施形態において、前述した第1実施形態で説明したものと同じ構成には同一の符号を示す。また、第1実施形態と同様の構成および機能についての説明は省略し、本実施形態の特徴部分についてのみ説明する。
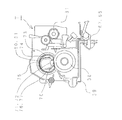
図9は、定着ユニットへの動力伝達手段および経路を示す斜視図である。図10は、定着ユニットへの動力伝達手段および経路を示す略断面図である。図11は、定着ユニットが圧接ニップを形成している画像形成動作時の略断面図である。図12は、定着ユニットが圧接ニップを解除した状態の略断面図である。図13は、非解除状態へのカムの動きを示すカム近傍詳細図である。
図9から図13を用いて、本実施形態における定着ユニットTの構成ついて詳しく説明する。第1実施形態と異なる点は、圧力変更のためのカム291が加熱ニップ部を形成する回転体(定着ローラ273)の回転軸に設けられている点である。
定着ローラ273は、金属パイプの外周部にシリコンゴム、フッ素ゴム等からなる弾性体ゴム層を有する。この定着ローラ273にハロゲンランプ(不図示)等を内装した構成で加熱ユニットを構成する。
また、加圧ローラ238は、定着ローラと同様に金属パイプの外周部にシリコンゴム、フッ素ゴム等からなる弾性体ゴム層が形成されている。定着ローラ273内にハロゲンヒータ等の加熱体が内装された加熱ユニットと加圧ローラ238は、後述の圧力付与機構により圧力が付与されることで加熱ニップ部としての圧接ニップ部Nを形成する。
この圧接ニップ部Nを記録材Sが通過することによって、記録材S上の未定着画像が定着される。
次に、圧接ニップ部Nを形成するための加圧構成について説明する。定着ローラ273の両端軸部は定着ユニットT内に固定された定着側板(不図示)に回転可能にそれぞれ支持されている。
加圧ローラ238は加圧板265,266に両端軸部を回転可能に揺動支持されている。また、加圧板265,266は定着側板(不図示)に固定された支持軸295により揺動可能に支持されている。
この加圧板265,266を加圧バネ262,263で荷重することにより圧接ニップ部Nを形成する。定着ユニットTは上述の他に、加熱ユニットと加圧ローラ238の記録材搬送方向の下流近傍に搬送ローラ231を有する。
なお、加熱ユニットの両端部近傍に位置する加圧板265,266、加圧バネ262,263については、一端側のみの図示しており、他端側は図示していない。
このように、圧接ニップ部Nを形成するための圧力を掛ける圧力付与機構は、前述した加圧バネ262,263、加圧板265,266、定着下板264など圧力付与に関わる部材によって構成されている。なお、圧力付与機構は、前述した構成に限定されるものではない。圧力付与機構は、圧接ニップ部Nを形成するための圧力を掛ける構成であれば、その他の構成であっても良い。
<定着ユニットの動作>
次に本実施形態における定着ユニットの画像形成時および圧接ニップ解除/非解除動作時について説明する。
図9及び図10に示すように、定着ユニットTは駆動源としてのモータ280によって駆動される。このモータ280は正回転および逆回転の可能なDCモータやステッピングモータなどが用いられる。
モータ280の動力は装置本体Eに設けられたギア281〜283により定着ユニットTへ伝達される。定着ユニットTにはギア285〜287が設けられユニット化されている。また、モータ280の駆動力はギア281を介してギア295〜298により装置本体Eへ伝達される。
定着ユニットTへの駆動伝達経路は1種類のギア列しかなく、モータの正回転時及び逆回転時は同一のギア列で定着ユニットTへ動力を伝達する。
従って、定着ユニットTの駆動用および圧接ニップ解除用にそれぞれ別にギア列を設ける必要がない。ギア285は定着ローラ273に駆動伝達可能に固定されており、モータ180の駆動力はギア285を介して定着ローラ273へ伝達される。ギア286,287は搬送ローラ231への動力伝達を行う。
定着ユニットTは、圧接ニップ部Nに掛かる圧力を変更する圧力変更機構を有している。圧力変更機構は圧力付与機構に作用するカム部材としてのカム291,292を有しており、カム291,292の回動により圧接ニップ部Nに掛かる圧力を変更できる。
本実施形態のカム部材291,292は圧力付与機構の一部である加圧板265,266に作用する。本実施形態では、圧力変更機構は、前記カム291,292のほか、定着ローラ273を駆動するモータ280など圧力変更に関わる部材によって構成されている。
以下、詳しく説明する。なお、圧力変更機構は、前述した構成に限定されるものではない。圧力変更機構は、前記圧力付与機構に作用するカム291,292を有し、前記カム291,292の回動により前記圧接ニップ部Nに掛かる圧力を変更する構成であれば、その他の構成であっても良い。
前記圧力付与機構に作用するカム291,292はワンウェイクラッチ(ワンウェイクラッチ機構)を介して記録材と接触する回転体の回転軸に設けられている。本実施形態では、カム291,292は、記録材に接触する回転体であり且つ加熱ニップ部を形成する回転体としての定着ローラ273の回転軸274上に設けられている。
従って、モータ280の正回転時(矢印a方向)には定着ローラ273の回転軸274の動力がカム291,292へはワンウェイクラッチの空転トルクのみが伝達される。そして、モータ280の逆回転時(矢印b方向)には定着ローラ273の回転軸274からカム291,292へはワンウェイクラッチがロックすることにより動力は伝達される。
なお、ここでいうモータ280の正回転時とは定着ローラ273が記録材を排出する方向(記録材搬送方向)に回転する時であり、モータ280の逆回転時とは定着ローラ273が前記記録材搬送方向とは逆方向へ回転する時である。
このように両側のカム291,292への動力伝達は定着ローラ273の回転軸274を用いて行う。このようにカム291,292への動力伝達に定着ローラ273の回転軸274を用いるために、カム291,292に動力を伝達する部材を新たに設ける必要がない。
カム291,292は加圧板265,266の位置を制御するカム面291a,292aを有する。また、加圧板265は圧接ニップ部Nの状態を検出/制御するためのセンサ遮光部265aを有する。
さらに、カム291,291は位置決めを行うために設けられた回転止め部291c,292cと定着上板64に設けられた位置決め部290a,290bにより初期位置が決められる。この回転止め部291c,292cは、定着ローラ273長手方向において加圧板265,266を逃げた位置にあるため回動を妨げることはない。
また、位置決め部290a,290bは弾性体290cにより付勢されており、回転止め部291c,292cとの接触時には退避可能な構成となっている。
位置決め部290a,290bを装置本体Eに設けるのではなく、定着ユニットT内の定着上板64に共に設けているため精度の良いカムの位置決め及び両側のカム291,292の位相合わせが可能となる。
このように、位置決め部を設け弾性体とすることで、正回転時にはカムの正確な位置決めが可能であり、逆回転時にはカムの回動を妨げないため、省スペースかつ低コストな構成でカムの正確な位置制御が出来る。
この加圧板265のセンサ遮光部265aと、カムセンサ293、及び装置本体Eの電装部(制御部)4により圧接ニップ部Nの解除/非解除の制御を行う。カムセンサ293は透過型センサであり、発光部と受光部間をセンサ遮光部265aで遮光/非遮光を行うことで圧接ニップ部Nの解除/非解除の状態を検知する。
また、カムセンサ293は定着ユニットT内に設けられている。定着ユニットT内の圧接ニップ部Nの状態を検知するセンサ構成を、装置本体Eに設けるのではなく定着ユニットT内に設けているため、装置本体を大きくすることなく、さらにはセンサでの圧接ニップ部Nの状態検出精度が向上している。
<画像形成時の動作>
図10及び図11に示すように、画像形成時には、モータ280の矢印a方向の動力が、ギア281〜283を介して定着ユニットTへ伝達される。定着ローラ273、搬送ローラ231は正回転方向(矢印a方向)に回転することで、記録材上の未定着画像の定着および記録材の搬送を行う。
この時、加圧ローラ238が加圧板265,266、加圧バネ262,263、定着下板264により定着ローラ273に対して付勢されることで圧接ニップ部Nを形成している。
ギア285が矢印a方向に回転すると、定着ローラ273の回転軸274からカム291,292へはワンウェイクラッチの空回転トルクが伝達される。
この空回転トルクによりカム291,292も矢印a方向への回転力が発生する。このカム291,292の矢印a方向への回転力は,回転止め部291c,292cと,位置決め部290a,290bにより止められ両側のカムは初期位置となる。
このように、モータ180が矢印a方向へ回転すると、モータ回転開始時のカム291,292の位相が初期位置の場合,カム291,292は回動しない。
しかしながら、モータ回転開始時のカム291,292の位相が初期位置より矢印b方向へずれていた場合(位相がずれている場合も含む)は、カム291,292に対してワンウェイクラッチの空回転トルクが伝達し、位相が初期位置になるまでカムは回動する。
このように、位置決め部290a,290bは定着ユニットT内に設けられ、さらには同一部品に設けられている。このため、精度の良いカムの位置決め及び両側のカム291,292の精度良い位相合わせが可能となり、 省スペースかつ低コストな構成でカムの正確な位置制御が出来る。尚、位置決め部290a,290bを定着ユニットT内に固定されている構成であるならば、他の構成でも精度の良いカムの位置決め及び両側のカム291,292の位相合わせが可能となる。
この圧接ニップ部Nの非解除を検出するために加圧板265に設けられたセンサ遮光部265aが、カムセンサ293を遮光し遮光状態となることで圧接ニップ部Nの非解除を検出する。
<圧接ニップ部Nの解除時の動作>
次に圧接ニップ部Nを解除する必要が発生した時には、モータ280が逆回転(矢印b方向)を行う。図10及び図12に示すように、モータ280の逆回転による動力はギア281〜283により定着ユニットTへ伝達される。
逆回転時の動力伝達は、正回転時の動力伝達ギア列と同一のギア列で伝達する。ギア285より定着ローラ273の回転軸274へ伝達された逆回転方向(矢印b方向)の力は、ワンウェイクラッチを介してカム291,292へ伝達され、カム291,292は矢印b方向へ回転する。カム291,292のカム面291a,292aは加圧板265,266の曲げ加工により設けられた面に作用する。
この結果、加圧板265,266は加圧バネ262,263の力に抗して移動し、圧接ニップ部Nを解除する。また、カム291,292の初期位置決めを正確に行っているため、カム291,292の正確な位相制御も可能である。
圧接ニップ部Nの解除と同時に加圧板265に設けられたセンサ遮光部265aが退避すると、カムセンサ293が受光状態になり加圧板265,266の移動が検知される。この結果を受けて制御部4はモータ280の回転を止める。
圧接ニップ部Nを解除した状態では、定着ローラや加圧ローラの弾性体層の永久変形を抑えることができ、また定着ユニットでジャムした記録材を容易に取り除くことが出来る。したがって本実施形態では、圧接ニップ部の解除は画像形成装置本体の電源をOFFする時及び記録材のジャムが発生した時に自動的に行われる。
<圧接ニップ部Nの解除状態から非解除状態への動作>
圧接ニップ部Nを解除状態から非解除状態へ戻す必要が発生した時には、さらにモータ280を逆回転(矢印b方向)へ回転させる。そして、上述と同様に、モータ280からの動力が伝達され、カム291,292は逆回転(矢印b方向)を行い、圧接ニップ部Nは非解除状態(圧接状態)となる。
この時、回転止め部291c,292cは定着ローラ273長手方向において加圧板265,266を逃げた位置にあるため回動を妨げることはない。
図13に示すように、モータ280の逆回転(矢印b方向)によって定着ローラ273の回転軸274は一定角速度で矢印b方向に回転し、カム291,292も同一方向、同一角速度で回転する。この時の角速度をω1とする(図13(1))。カム面291a,292aが加圧板265,266を加圧バネ262,263の力に抗して移動させる領域を過ぎると、加圧バネ262,263の力と加圧板265,266によってカム291,292は矢印b方向に押される。
この時のカムの角速度をω2とする(図13(2))。この時の角速度はω2>>ω1となり、カム291,292は加圧バネ262,263と加圧板265,266によって押されることによって発生した慣性力でワンウェイクラッチの空転トルクに抗して回転する。この慣性力で回転中のカム291,292の回転止め部291c,292cは位置決め部290a,290bに当接するが位置決め部290a,290bは弾性体290cにより弾性付勢されているため、退避し回転を妨げることはない。このままカム291,292は回転を続け加圧板265,266に当接し止められる(図13(3))。
圧接ニップ部Nが非解除状態に戻ったことをカムセンサ293が検知すると、制御部4はモータ280の回転を止める。圧接ニップ部Nが非解除状態になった後にモータ280を正回転(矢印a方向)させることでカム291,292内のワンウェイクラッチの空回転トルクによりカム291,292も矢印a方向へ回転する。そして、回転止め部291c,292cと、位置決め部290a,290bとにより両側のカムは初期位置となる。
圧接ニップ部Nの解除は圧力を完全に解除しなくとも軽減することでもよい。これはカム291,292の加圧板位置制御用カム面291a,292aの形状設定により容易に実施できる。
また、カム291,292は正確な位相への位置決めおよび両側カムの位相合わせが正確に行われているため、カム面291a,292aの形状設定とカム回転角の制御により加圧力を制御することが可能である。
このように、カム面291a,292aの形状設定により様々な加圧力の異なるパターンを用意し、加圧力を替えることの出来る定着ユニットTも可能である。
また、本実施形態においては定着ローラの回転軸上にカムを有する構成としたが、加圧ローラの回転軸上にカムを有する構成を適応し得ることは明らかである。
上述したように、本実施形態によれば、圧接ニップ部Nを形成するための圧力を掛ける圧力付与機構に作用するカム291,292を、定着ユニットTが有する定着ローラ273の回転軸274に設けている。
この構成により、定着ユニットT、ひいては装置本体Eの高コスト化及び大型化を招くことなく、圧接ニップ部Nに掛かる圧力を変更できる。
また、前記カム291,292は、定着ローラ273を駆動するモータ280の動力および駆動列で回動するので、駆動源および駆動列を新たに設ける必要がない。このため装置本体E、定着ユニットTは省スペースかつ低コストで構成することが可能である。
さらに、カムの位置決め部を弾性付勢することで、正回転時にはカムの正確な位置決めが可能であり、逆回転時にはカムの回動を妨げなないため、省スペースかつ低コストな構成でカムの正確な位置制御が出来る。
他の実施形態
前述した実施形態では、像加熱装置としてプリンタや複写機等の画像形成装置に搭載される加熱定着装置を例示した。しかしながら、本発明はこのような加熱定着装置に限られるものではなく、例えば、記録材に形成された画像の光沢性を向上させる光沢付与装置等にも適用できる。また、画像形成装置に搭載されない像加熱装置にも適用できる。
また,定着装置の加圧ニップ部にかかる圧力を変更できる構成について例示した。しかし、その他の圧接ローラ等の圧接力変更制御にも適応しうることは明らかである。
本発明の第1の実施形態に係る定着ユニットへの動力伝達手段及び経路を示す斜視図である。
本発明の第1の実施形態において、定着ユニットへの動力伝達手段及び経路を示す略断面図である。
本発明の第1の実施形態において、定着ユニットが圧接ニップを形成し通常動作時の略断面図である。
本発明の第1の実施形態である定着ユニットが圧接ニップを解除した状態の略断面図である。
(a)〜(c)は、本発明の第1の実施形態において、非解除状態へのカムの動きを示すカム近傍詳細図である。
本発明の第1の実施形態において、圧接ニップ状態とセンサ検知状態のタイミングを示す略図である。
本発明の第1の実施形態において、電子写真画像形成装置の概略構成断面図である。
本発明の第1の実施形態である定着ユニットの概略構成断面図である。
本発明の第2の実施形態において、定着ユニットへの動力伝達手段及び経路を示す斜視図である。
本発明の第2の実施形態において、定着ユニットへの動力伝達手段及び経路を示す略断面図である。
(a)、(b)は、本発明の第2の実施形態において、定着ユニットが圧接ニップを形成している画像形成動作時の略断面図である。
(a)、(b)は、本発明の第2の実施形態において、定着ユニットが圧接ニップを解除した状態の略断面図である。
(a)〜(c)は、本発明の第2の実施形態において、非解除状態へのカムの動きを示すカム近傍詳細図である。
符号の説明
31 搬送ローラ(回転体)
32 回転軸
38 加圧ローラ(ニップ部形成部材)
60,61 フランジ
62,63 加圧バネ
64 定着上板
65,66 加圧板
73 定着フィルム
180 モータ(駆動源)
190a,190b 位置決め部
191,192 カム(カム部材)
191a,192a カム面
191b,192b カム面
191c,192c 回転止め部
193 カムセンサ
194,199 カムセンサレバー
195〜198 ギア
231 搬送ローラ
238 加圧ローラ
262,263 加圧バネ
264 定着下板
265,266 加圧板
265a センサ遮光部
273 定着ローラ(回転体)
274 回転軸
280 モータ(駆動源)
290a,290b 位置決め部
290c 弾性体
291,292 カム(カム部材)
291c,292c 回転止め部
293 カムセンサ
E 電子写真画像形成装置本体
N 圧接ニップ部(加熱ニップ部)
P プロセスカートリッジ
S 記録材
T 定着ユニット(像加熱装置)