JP5149250B2 - 永久磁石同期モータの制御装置 - Google Patents
永久磁石同期モータの制御装置 Download PDFInfo
- Publication number
- JP5149250B2 JP5149250B2 JP2009162556A JP2009162556A JP5149250B2 JP 5149250 B2 JP5149250 B2 JP 5149250B2 JP 2009162556 A JP2009162556 A JP 2009162556A JP 2009162556 A JP2009162556 A JP 2009162556A JP 5149250 B2 JP5149250 B2 JP 5149250B2
- Authority
- JP
- Japan
- Prior art keywords
- permanent magnet
- synchronous motor
- magnet synchronous
- phase
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001360 synchronised effect Effects 0.000 title claims description 96
- 238000000034 method Methods 0.000 claims description 16
- 230000002441 reversible effect Effects 0.000 claims description 6
- 230000001133 acceleration Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 16
- 238000001514 detection method Methods 0.000 description 7
- 244000145845 chattering Species 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 238000007664 blowing Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/029—Restarting, e.g. after power failure
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/024—Synchronous motors controlled by supply frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/182—Circuit arrangements for detecting position without separate position detecting elements using back-emf in windings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2260/00—Function
- F05D2260/85—Starting
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Description
図1は、本発明の第一の実施形態における永久磁石同期モータの制御装置の構成図である。
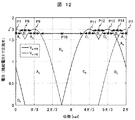
誘起電圧Eは、永久磁石同期モータ1とインバータIC2の接続部であるU相,V相,W相の端子に印加される。永久磁石同期モータ1の位相θの基準をU相巻線位置とし、また、永久磁石同期モータ1の中性点を基準電位とすれば、U相,V相,W相の相誘起電圧Vu,Vv,Vwは、(2)式で表される。
Vv=−E・sin{θ−(2π/3)} …………………………………(2)
Vv=−E・sin{θ+(2π/3)}
すなわち、図2に示すように、Vu,Vv,Vwは、振幅がEの正弦波であり、それぞれの位相は、2π/3づつ異なる。
(3)式が表す範囲、すなわち、図2での区間21において、誘起電圧最小相は、U相である。ここで、Vu−FRは、下アーム還流ダイオードの順電圧Vfの分だけ、基準電位よりも小さくなるが、実際の回路ではVfは微小であることから、(4)式で表される。
また、Vv−FRは、Vu−FRを基準として、線間電圧分だけ高い電圧となるから、(5)式で表される。
同様にして、Vw−FRも求められる。
このとき、(6)式が示す交点を図4のP31に示す。この交点P31は、縦軸(電圧)に関して、Vu−FR(実線)よりも上方に位置する。これは、以下の(7)式が成り立つことを意味する。
このとき、比較部8により、Vu−flagはLとなる。また、同様にVv−flagもLとなることが分かる。

この場合、誘起電圧Eに対して、閾値V0が大きすぎ、Vu−flagおよびVv−flagは、常にLとなってしまう。これを回避するため、本実施例では、次の(9)式の関係でV0を設定する。
しかし、ノイズを回避する観点から、V0の最小値には限度があり、現実には、低速域において、必ずしも(9)式を成り立たせることができるとは限らない。このとき、(9)式が成立しない範囲、すなわち、(8)式に(1)式を代入して得られる(10)式で示す低速域においては、本方式によっては、位相推定値θFRおよび回転速度推定値ωFRを正しく得ることができない。
そこで、(10)式で示す低速域においては、モータ1を一旦停止させ、再起動させる。このため、電圧指令演算部11は、直流位置決め、あるいは短絡ブレーキを用いるための、Vu*,Vv*,Vw*を出力し、永久磁石同期モータ1を一旦停止させてから再起動させる。この点については後述する。
図6には、回転方向が順方向(正転)であるときの領域の変化を、閾値V02とV03の場合について示している。領域の変化は、ρと1.5との大小関係によって異なる。これは、ρが1.5のときに誘起電圧最小相が変化する場合があるため、例えば、図6に示すP41およびP42において、Vu−flagまたはVv−flagが急峻に変化するからである。また、回転方向が逆方向(逆転)のとき、領域の変化は逆になる。
図7より、領域の変化に、C→Dの変化が含まれるのは、ρが1.5より小さく、かつ正転であるときに限られることが分かる。このように特定の変化パターンは、ρと1.5との大小関係および回転方向を推定する根拠となる。同様にして、それらを推定するための変化パターンを図7より抽出すると、例えば、表2に示すように整理できる。
これは、図6より分かるように、(13)式が成り立つとき、回転方向に関係なく、領域の変化は「A→B→A→B→C→B→C→B→A→…」を繰り返し、区別が付かないからである。
θ〜=5π/6 ……………………………………………………………(15)
同様にして、永久磁石同期モータ1が1回転するとき、図11に示すように、P1〜P6の6箇所が、Vu−flag,Vv−flagの立上り,立下り時点間の中間位置として分かるので、推定位相θ〜と時刻の関係を得ることができる。
(16)式を応用すれば、ノイズの影響を抑えられる。例えば、時刻T90およびθ90の代わりに、時刻と推定位相θ〜の関係を予め複数記憶しておき、その平均値を用いてもよい。
図14は、本発明の第二の実施形態における永久磁石同期モータ1の制御装置の部分構成図である。
図17は、本発明の第三の実施形態における永久磁石同期モータ1の制御装置の部分構成図である。
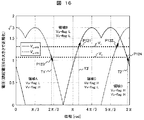
このときのVu−FRのEに対する比ηを、次の(18)式で定義する。
ηは、図18における縦軸の数値でもある。これは、図18において、Vu−FRをEで正規化して表現しているからである。ηは、位相θのみによって定まるから、推定位相θ〜に基づいてηを推定することができる。ηの推定値をη〜とすると、(1)式,(17)式,および(18)式より、次の(19)式を得る。
(19)式によって、Ke^を求めることができ、電圧指令演算部11においてKe*をKe^で同定できる。
Claims (12)
- 直流電源と、
前記直流電源より供給された直流電力を交流電力に変換するインバータと、
前記インバータの出力端子を通じて交流電力を供給される永久磁石同期モータとを備えた永久磁石同期モータの制御装置において、
前記永久磁石同期モータの空転時に、前記インバータの出力端子に生じる各相の電位の内の最小値を基準とした前記最小値を有する相と所定の相の線間電圧と、所定の閾値電圧との大小関係の変化に基づいて、前記永久磁石同期モータの回転磁極の位相を推定する手段を備え、
かつ、少なくとも2つの異なる線間電圧と、前記閾値電圧との大小関係に基づいて、空転している前記永久磁石同期モータの回転方向を推定することを特徴とする永久磁石同期モータの制御装置。 - 請求項1において、少なくとも1つの前記線間電圧と、前記閾値電圧との大小関係に基づいて、空転している前記永久磁石同期モータが生じる誘起電圧に対する前記閾値電圧の比あるいは大きさを推定することを特徴とする永久磁石同期モータの制御装置。
- 請求項1または2において、前記永久磁石同期モータが生じる誘起電圧に対する前記閾値電圧の比が√3より小さくなるように、前記閾値電圧を設定することを特徴とする永久磁石同期モータの制御装置。
- 請求項1〜3のいずれかにおいて、少なくとも2相の前記線間電圧と、前記閾値電圧との大小関係が逆転するタイミングに基づいて、空転している前記永久磁石同期モータの位相と時刻との関係を推定することを特徴とする永久磁石同期モータの制御装置。
- 請求項1〜4のいずれかにおいて、前記線間電圧と、前記閾値電圧との大小関係を、レベルシフト回路およびNOT回路を用いて検出することを特徴とする永久磁石同期モータの制御装置。
- 請求項1〜5のいずれかにおいて、前記線間電圧と、前記閾値電圧との大小関係を、レベルシフト回路およびシュミット回路を用いて検出することを特徴とする永久磁石同期モータの制御装置。
- 請求項4〜6のいずれかにおいて、空転している前記永久磁石同期モータの位相と時刻との関係に基づいて、前記永久磁石同期モータの回転速度を推定することを特徴とする永久磁石同期モータの制御装置。
- 請求項7において、空転している前記永久磁石同期モータの位相と時刻との関係および回転速度の推定値に基づいて、任意の時刻における前記永久磁石同期モータの位相を推定することを特徴とする永久磁石同期モータの制御装置。
- 請求項8において、空転している前記永久磁石同期モータの回転速度の推定値の絶対値が予定値よりも小さい場合に、直流位置決めまたは短絡ブレーキを行い、回転速度の推定値の絶対値が予定値よりも大きい場合に、前記永久磁石同期モータの位相の推定値と、回転速度の推定値とに基づいて、同期運転またはベクトル制御を開始することを特徴とする永久磁石同期モータの制御装置。
- 請求項9において、同期運転またはベクトル制御の開始後において、前記永久磁石同期モータの回転方向が逆方向である場合には、前記永久磁石同期モータを停止させ、および/または、その後、順方向へ加速させることを特徴とする永久磁石同期モータの制御装置。
- 請求項9または10において、前記永久磁石同期モータが空転している段階において、前記閾値電圧と、前記永久磁石同期モータの位相の推定値と、回転速度の推定値とに基づいて、前記永久磁石同期モータの誘起電圧係数を同定することを特徴とする永久磁石同期モータの制御装置。
- 請求項1〜11のいずれかにおいて、前記インバータとして三相インバータICを備えていることを特徴とする永久磁石同期モータの制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009162556A JP5149250B2 (ja) | 2009-07-09 | 2009-07-09 | 永久磁石同期モータの制御装置 |
| US12/827,736 US8436563B2 (en) | 2009-07-09 | 2010-06-30 | Control unit and control method for permanent magnet synchronous motor |
| EP10006801.4A EP2273665B1 (en) | 2009-07-09 | 2010-07-01 | Control unit and control method for permanent magnet synchronous motor |
| CN2010102269423A CN101951213B (zh) | 2009-07-09 | 2010-07-08 | 永磁同步电动机的控制装置以及控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009162556A JP5149250B2 (ja) | 2009-07-09 | 2009-07-09 | 永久磁石同期モータの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011019348A JP2011019348A (ja) | 2011-01-27 |
| JP5149250B2 true JP5149250B2 (ja) | 2013-02-20 |
Family
ID=43036962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009162556A Active JP5149250B2 (ja) | 2009-07-09 | 2009-07-09 | 永久磁石同期モータの制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8436563B2 (ja) |
| EP (1) | EP2273665B1 (ja) |
| JP (1) | JP5149250B2 (ja) |
| CN (1) | CN101951213B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11168916B2 (en) | 2018-06-11 | 2021-11-09 | Broan-Nutone Llc | Ventilation system with automatic flow balancing derived from a neural network and methods of use |
| JP7350820B2 (ja) | 2021-10-29 | 2023-09-26 | 大王製紙株式会社 | 吊り下げ具及び吊り下げ具形成用シート |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5762794B2 (ja) * | 2011-03-31 | 2015-08-12 | 株式会社荏原製作所 | モータ駆動用の電力変換装置 |
| JP6229167B2 (ja) | 2012-07-27 | 2017-11-15 | パナソニックIpマネジメント株式会社 | ブラシレスdcモータを搭載した送風装置 |
| ES2922730T3 (es) | 2012-07-30 | 2022-09-19 | Daikin Ind Ltd | Dispositivo de detección de posición de rotación y acondicionador de aire |
| CN103001569B (zh) * | 2012-11-13 | 2015-10-07 | 安徽颐和新能源科技股份有限公司 | 高压变频电机空转转速跟踪方法 |
| CN103199778A (zh) * | 2013-04-09 | 2013-07-10 | 江苏协昌电子科技有限公司 | 无传感器的直流无刷电机的转子位置检测方法 |
| JP2014231823A (ja) * | 2013-05-30 | 2014-12-11 | 株式会社荏原製作所 | ポンプ装置 |
| JP6158114B2 (ja) * | 2014-02-18 | 2017-07-05 | 株式会社東芝 | ブラシレスモータ駆動回路、および、ブラシレスモータ駆動システム |
| CN104104297B (zh) * | 2014-07-16 | 2016-09-07 | 东南大学 | 一种基于磁通切换直线电机的轨道交通速度脉动抑制方法 |
| US9705438B2 (en) | 2015-07-14 | 2017-07-11 | Infineon Technologies Austria Ag | Controller for a free-running motor |
| JP6288121B2 (ja) * | 2016-02-22 | 2018-03-07 | ダイキン工業株式会社 | 回転方向特定装置 |
| JP6568626B1 (ja) * | 2018-07-05 | 2019-08-28 | エクセン株式会社 | コンクリートバイブレータ用ブラシレスモータの制御装置 |
| CN112737462B (zh) * | 2020-12-30 | 2023-03-24 | 杭州士兰微电子股份有限公司 | 永磁同步电机初始状态的辨识方法及装置 |
| CN113726256B (zh) * | 2021-08-31 | 2023-09-19 | 中车株洲电机有限公司 | 瞬时电压基波信号的重构系统及交流电机驱动控制装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62178189A (ja) * | 1986-01-31 | 1987-08-05 | Hitachi Ltd | インバ−タの瞬停再投入装置 |
| JPS63178189A (ja) * | 1987-01-19 | 1988-07-22 | Hitachi Ltd | ベアリングとベアリング取付部材の接着方法 |
| US4835448A (en) * | 1987-12-28 | 1989-05-30 | Sundstrand Corporation | Brushless DC motor torque control |
| JPH06253588A (ja) * | 1993-02-24 | 1994-09-09 | Toshiba Corp | ブラシレスモータの駆動装置 |
| TW349289B (en) * | 1994-03-15 | 1999-01-01 | Seiko Epson Corp | Brushless DC motor drive apparatus |
| KR100259375B1 (ko) * | 1997-11-10 | 2000-06-15 | 윤종용 | 센서리스 스위치드 릴럭턴스 모터 구동장치 및 그 구동방법 |
| US6121736A (en) * | 1998-07-10 | 2000-09-19 | Matsushita Electric Industrial Co., Ltd. | Control apparatus for motor, and motor unit having the control apparatus |
| WO2004006424A1 (ja) * | 2002-07-08 | 2004-01-15 | Kabushiki Kaisha Yaskawa Denki | 交流電動機のセンサレスベクトル制御方法及びその制御装置 |
| JP2004343833A (ja) * | 2003-05-13 | 2004-12-02 | Toshiba Corp | モータ制御装置 |
| US7242175B2 (en) * | 2003-08-08 | 2007-07-10 | Stmicroelectronics, Inc. | Determining rotation of a freewheeling motor |
| JP4406552B2 (ja) | 2003-10-30 | 2010-01-27 | 日立アプライアンス株式会社 | 電動機の制御装置 |
| JP4552466B2 (ja) * | 2004-03-12 | 2010-09-29 | 株式会社日立製作所 | 交流モータの制御装置,2チップインバータ及びワンチップインバータ。 |
| JP4049126B2 (ja) * | 2004-06-09 | 2008-02-20 | ソニー株式会社 | モータ駆動回路、電子機器およびモータ駆動方法 |
| JP4386815B2 (ja) * | 2004-10-04 | 2009-12-16 | パナソニック株式会社 | モータの駆動装置および駆動方法 |
| US7652441B2 (en) * | 2005-07-01 | 2010-01-26 | International Rectifier Corporation | Method and system for starting a sensorless motor |
| US7193383B2 (en) * | 2005-07-06 | 2007-03-20 | Honeywell International, Inc. | Enhanced floating reference frame controller for sensorless control of synchronous machines |
| JP5193421B2 (ja) * | 2005-12-09 | 2013-05-08 | 日立アプライアンス株式会社 | 電動機の制御装置 |
| JP2008005632A (ja) * | 2006-06-22 | 2008-01-10 | Matsushita Electric Ind Co Ltd | モータ駆動装置及びモータ駆動方法並びにディスク駆動装置 |
| JP2009055681A (ja) * | 2007-08-24 | 2009-03-12 | Ricoh Co Ltd | モータ起動装置及びモータ起動方法 |
-
2009
- 2009-07-09 JP JP2009162556A patent/JP5149250B2/ja active Active
-
2010
- 2010-06-30 US US12/827,736 patent/US8436563B2/en active Active
- 2010-07-01 EP EP10006801.4A patent/EP2273665B1/en active Active
- 2010-07-08 CN CN2010102269423A patent/CN101951213B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11168916B2 (en) | 2018-06-11 | 2021-11-09 | Broan-Nutone Llc | Ventilation system with automatic flow balancing derived from a neural network and methods of use |
| JP7350820B2 (ja) | 2021-10-29 | 2023-09-26 | 大王製紙株式会社 | 吊り下げ具及び吊り下げ具形成用シート |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101951213B (zh) | 2013-04-24 |
| CN101951213A (zh) | 2011-01-19 |
| EP2273665A3 (en) | 2018-03-28 |
| JP2011019348A (ja) | 2011-01-27 |
| EP2273665B1 (en) | 2019-04-17 |
| EP2273665A2 (en) | 2011-01-12 |
| US20110006715A1 (en) | 2011-01-13 |
| US8436563B2 (en) | 2013-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5149250B2 (ja) | 永久磁石同期モータの制御装置 | |
| JP6167982B2 (ja) | モータ駆動装置および電動圧縮機 | |
| JP6868772B2 (ja) | モータ制御装置およびモータ制御方法 | |
| US20070296371A1 (en) | Position sensorless control apparatus for synchronous motor | |
| US8754603B2 (en) | Methods, systems and apparatus for reducing power loss in an electric motor drive system | |
| JP2013021843A (ja) | 永久磁石同期電動機の初期磁極位置調整装置 | |
| WO2016006386A1 (ja) | 車両用回転電機の制御装置、及び制御方法 | |
| JP5986595B2 (ja) | 電力変換器制御装置及びそれを備えたモータシステム | |
| JP5910583B2 (ja) | 交流電動機の制御装置 | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| JP2011188615A (ja) | 車両用発電機 | |
| JP2006230049A (ja) | モータ制御装置およびモータ電流検出装置 | |
| JP2010088267A (ja) | ブラシレスモータの制御装置及び制御方法 | |
| JP4367279B2 (ja) | 同期モータの制御装置 | |
| JP2010088261A (ja) | 電動機の電流センサ異常検知装置 | |
| JP2012120320A (ja) | 回転センサレス制御装置 | |
| JP7196469B2 (ja) | 同期リラクタンスモータの制御装置 | |
| JP6031969B2 (ja) | モータ駆動装置 | |
| JP2018007390A (ja) | モータ制御装置 | |
| JP2012244740A (ja) | 駆動装置 | |
| JP2007282319A (ja) | 同期モータ制御装置 | |
| JP6108109B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2009278692A (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2010028981A (ja) | 同期モータの回転子位置推定方法および同期モータの制御装置 | |
| JP6681266B2 (ja) | 電動機の制御装置及びそれを備えた電動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110610 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5149250 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |