JP4982756B2 - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP4982756B2 JP4982756B2 JP2007242913A JP2007242913A JP4982756B2 JP 4982756 B2 JP4982756 B2 JP 4982756B2 JP 2007242913 A JP2007242913 A JP 2007242913A JP 2007242913 A JP2007242913 A JP 2007242913A JP 4982756 B2 JP4982756 B2 JP 4982756B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- pattern
- conductor pattern
- rotation angle
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/06—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices
- H02K29/12—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices using detecting coils using the machine windings as detecting coil
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/24—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets axially facing the armatures, e.g. hub-type cycle dynamos
Description
これに対して、さらに微細な制御を必要とする場合には、回転軸の角度を検出するレゾルバが使われる(例えば、特許文献1参照。)。
このブラシレスモータ50は、コイル53から成る固定子と、磁石55が取り付けられた回転子54とを備え、回転子54の円筒状の内面と回転軸56との間に、遊星ギアから成る減速ギア59が3個設けられて成る。
減速ギア59は、円柱形状で、回転軸56の継手57と、回転子54の内面とに、それぞれ歯車でかみ合わせている。減速ギア59の中央の軸58は、固定子(コイル)53の保持材(コイルのコア)52が取り付けられた基板51に取り付けられている。
これに対して、減速ギアを設けたブラシレスモータでは、モータのオリジナルの回転数と、回転軸の回転数が異なるため、遊星ギアによって減速された回転軸に直接レゾルバを設けると、細かい整流制御を行うことが難しくなる。
このとき、以下に挙げる問題点を生じる。
(2)減速ギアの外周よりも径が大きいレゾルバを用いることになるため、大きな座面加工が必要になることも含めて、コストが増大、かつ重量が増大する。
図8A及び図8Bに示すように、図7A〜図7Cに示した構成と比較して、回転子54を回転軸方向へリング状に突出させており、その突出部にレゾルバの回転子63が取り付けられている。さらにレゾルバの回転子63の外側にギャップを有して、レゾルバの固定子62が設けられている。この場合、図8Bに示すように、10個の固定子62が設けられている。
また、レゾルバは、モータのオリジナルの回転数即ち回転子54の回転数を検出するために、モータの回転子54の外側に設けられているので、大きい径のレゾルバ(回転子63、固定子62、取り付け部材61)を形成する必要があり、コストと重量が大きくなる。
また、導体パターンと、対向して設けられた回転角度検出センサ本体とから、回転体の回転角度を検出するので、回転体の全周360°に対して回転角度検出センサを設ける必要がなく、回転角度検出センサが占める空間を大幅に低減することができ、モータの設計の自由度が向上する。
従って、回転角度検出センサを有するモータの小型化や軽量化、センサの部品コストの低減が可能になる。
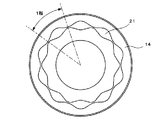
減速ギア19は、円柱形状で、回転軸16の継手17と、回転子14の内面とに、それぞれ歯車でかみ合わせている。減速ギア19の中央の軸18は、固定子(コイル)13の保持材(コイルのコア)12が取り付けられた基板11に取り付けられている。
磁石15は、回転子14の固定子13側の表面に取り付けられ、間にギャップを有して固定子13と対向している。
そして、導体パターン21及びセンサ本体22により、回転子14の回転角度を検出するセンサを構成している。
このセンサ本体22は、円弧に沿ってカーブした形状を有する箱になっており、この箱の内部に、詳細を後述する4つのパターンコイル31,32,33,34を備えている。箱は薄い板状の部材23に取り付けられていて、この板状の部材23の端部に取り付け用の穴24を有している。そして、図1Aに示す部材25に取り付けられる。
プリント回路基板等の基板30の上に、角型の渦巻形状を有する導体により、4つのパターンコイル31,32,33,34が形成されている。各パターンコイル31,32,33,34により、それぞれ、空芯のコイルが構成される。
なお、これら基板30及びパターンコイル31,32,33,34は、図2Bに示した箱の、導体パターン21と対向する側(図2Bの左側)に配置することが望ましい。
そして、好ましくは、さらに、導体パターン21と反対の側(図2Bの右側)に、演算処理用の回路や周辺回路等を設けることによって、回転角度検出センサのモジュール化を図ることができ、小型化が促進される。
従って、パターンコイル31,32,33,34に電流を流して発生する磁束を、なるべく多く導体パターン21に作用させるために、センサ本体22の箱を構成する部材には、非磁性で非導電性である材料を用いることが望ましい。
そして、図示しないが、例えば、第1のセンサシステム22aの2つのパターンコイル31,33を並列に接続し、第2のセンサシステム22bの2つのパターンコイル32,34を並列に接続し、これらのそれぞれのセンサシステム22a,22bから検出信号を得るように回路を構成する。
また、センサ本体22の箱の内部を、非磁性の充填材で満たして、パターンコイル31,32,33,34や回路を構成する回路部品を、充填材に埋め込むことも可能である。
それぞれのパターンコイル31,32,33,34は、導体パターン21の幅の周期的な変化の1/4周期(位相差90°)の間隔で配置されている。
これにより、第1のセンサシステム22aの各パターンコイル31,33に対して、第2のセンサシステム22bのパターンコイル32,34が、90°の角度変位をもって配置されている。
これにより、センサシステム22a,22bの各対に、差分信号を発生させることができる。この差分信号を利用して、回転子14の絶対位置を検出することができる。また、導体パターン21の移動方向、即ち回転子14の回転方向(右回り、或いは左回り)を検出することも、可能である。
導体パターン21は、回転子14の1周に対して、10周期のパターン(1周期が36°)に形成されている。センサ本体22の箱は導体パターン21の約3周期に対応する大きさであり、箱の約半分内に4つのパターンコイル31,32,33,34が設けられている。
図6に示すように、導体パターン21は、回転子14が回転すると、特定の位置において幅が周期的に増減する。
この図6においては、導体パターン21の幅の周期的な変化の1相分の範囲も示している。
また、図6のように連続的に幅が変化する構成の他に、段階的に幅が変化する構成としてもよい。
従って、遊星ギアから成る減速ギア19があっても、問題なくモータ10のオリジナルの回転角度を検出し、その角度情報をモータの電流制御にフィードバックさせ、高精度のモータ駆動を実現することができる。
従って、回転角度検出センサを有するブラシレスモータの小型化や軽量化が可能になる。
そして、回転子14において、回転軸と直交する表面に直接導体パターン21を形成するので、導体パターン21を回転子14に対して精度良く形成することが容易にできる。
加えて、本発明のモータに備えられた回転角度検出センサは、従来のレゾルバが必要としていた磁性体や鉄心を用いない構成であるために、モータから外乱磁気が、角度検出制度に対して与える影響が小さい、という格別の効果を得ることができ、結果として、高精度の検出及びモータの駆動電流制御を実現できる。
上述の実施の形態の構成のような、本発明のモータを採用することにより、モータを含む駆動部を車輪に組み込む場合においても、車輪の幅が広くならなくて済む、という利点がある。
最低限1対2個のコイルがあれば、回転子の回転角度を精度良く検出することが可能である。また、センサ本体の占有する空間が大きくならない範囲で、コイルの個数を増やすことも可能である。
例えば、上述の実施の形態のセンサ本体22は導体パターン21の3周期分の大きさを有するので、コイルを4対8個形成することも可能である。
Claims (4)
- 磁性体を有するモータの回転体と回転軸との間に、遊星ギアから成る減速ギアが設けられ、
前記モータの前記回転体において、前記回転軸と直交する表面に、幅が周期的に変化する導体パターンが形成され、
前記導体パターンに対向して、回転角度検出センサ本体が設けられ、
前記回転角度検出センサ本体が、複数のパターンコイルと、前記複数のパターンコイルを備え、非磁性非導電性材料からなる箱とを有している上に、磁性体及び鉄心を有していない
ことを特徴とするモータ。 - 前記複数のパターンコイルが、前記導体パターンの幅の周期に対応する間隔で形成されていることを特徴とする請求項1に記載のモータ。
- 前記回転角度検出センサ本体が、前記回転体の全周の1/4を占めることを特徴とする請求項1又は請求項2に記載のモータ。
- 前記パターンコイルの空芯部の長手方向の寸法は、前記導体パターンの最大幅寸法よりも大きいことを特徴とする請求項1〜請求項3のいずれか1項に記載のモータ。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007242913A JP4982756B2 (ja) | 2007-09-19 | 2007-09-19 | モータ |
| KR1020107005210A KR101065220B1 (ko) | 2007-09-19 | 2008-09-01 | 모터 |
| PCT/JP2008/065636 WO2009037957A1 (ja) | 2007-09-19 | 2008-09-01 | モータ |
| EP08831987A EP2192673A4 (en) | 2007-09-19 | 2008-09-01 | ENGINE |
| US12/679,166 US20100219725A1 (en) | 2007-09-19 | 2008-09-01 | Motor |
| CN2008801076299A CN101803154B (zh) | 2007-09-19 | 2008-09-01 | 电机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007242913A JP4982756B2 (ja) | 2007-09-19 | 2007-09-19 | モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009077500A JP2009077500A (ja) | 2009-04-09 |
| JP4982756B2 true JP4982756B2 (ja) | 2012-07-25 |
Family
ID=40467777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007242913A Active JP4982756B2 (ja) | 2007-09-19 | 2007-09-19 | モータ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20100219725A1 (ja) |
| EP (1) | EP2192673A4 (ja) |
| JP (1) | JP4982756B2 (ja) |
| KR (1) | KR101065220B1 (ja) |
| CN (1) | CN101803154B (ja) |
| WO (1) | WO2009037957A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9417098B2 (en) * | 2011-07-18 | 2016-08-16 | Honeywell International Inc. | Stationary magnet variable reluctance magnetic sensors |
| KR101899799B1 (ko) * | 2012-06-22 | 2018-11-02 | 엘지이노텍 주식회사 | 모터 |
| CN103595182B (zh) * | 2012-08-14 | 2016-12-21 | 常州至精精机有限公司 | 减速皮带轮 |
| GB2545627B (en) | 2015-10-16 | 2021-04-21 | Yasa Ltd | Axial flux machine arrangement |
| CN107733200B (zh) * | 2016-08-10 | 2022-01-14 | 广东德昌电机有限公司 | 一种永磁无刷电机及应用该永磁无刷电机的电动单车 |
| CN110462997B (zh) * | 2017-02-20 | 2021-11-05 | 到达有限公司 | 电动机 |
| GB2574792B (en) * | 2018-04-27 | 2021-12-15 | Intellitech Pty Ltd | Rotationally balanced electric motor with air-core stator coils |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3642678A1 (de) * | 1986-12-13 | 1988-06-16 | Bosch Gmbh Robert | Messeinrichtung fuer drehwinkel und/oder drehgeschwindigkeit |
| DE4412898A1 (de) * | 1994-04-14 | 1995-10-19 | Bernhard Dipl Ing Orlowski | Planetengetriebe mit integriertem Elektromotor |
| CN2206515Y (zh) * | 1994-08-15 | 1995-08-30 | 李宜和 | 辅助动力马达 |
| JP3103487B2 (ja) | 1994-12-27 | 2000-10-30 | 多摩川精機株式会社 | バリアブルリラクタンス型角度検出器 |
| JP2003269993A (ja) * | 2002-03-20 | 2003-09-25 | Yoshikazu Ichiyama | 精密位置検出器 |
| US7053602B2 (en) * | 2002-03-25 | 2006-05-30 | The Furukawa Electric Co., Limited | Rotation sensor and method for detecting a rotation angle of a rotating member |
| JP3910875B2 (ja) * | 2002-04-16 | 2007-04-25 | 古河電気工業株式会社 | 回転センサ |
| DE10231980A1 (de) * | 2002-07-15 | 2004-02-19 | Schubach, Rudolf, Dipl.-Ing. | Vorrichtung zum berührungslosen Messen einer linearen Verschiebung oder einer Drehlage |
| CN101299562B (zh) * | 2002-08-16 | 2010-12-29 | 雅马哈发动机株式会社 | 轴向间隙型旋转电机 |
| JP4028827B2 (ja) * | 2003-07-31 | 2007-12-26 | 日本サーボ株式会社 | 減速機付永久磁石形ステッピングモータ |
| US7372256B2 (en) * | 2003-08-07 | 2008-05-13 | The Furukawa Electric Co., Ltd. | Rotation sensor |
| JP2005186667A (ja) * | 2003-12-24 | 2005-07-14 | Ntn Corp | 電動式車輪駆動装置 |
| US7183761B2 (en) * | 2004-02-20 | 2007-02-27 | The Furukawa Electric Co., Ltd. | Rotation sensor |
| JP2005231564A (ja) * | 2004-02-23 | 2005-09-02 | Ntn Corp | 電動式車輪駆動装置 |
| DE102004033084A1 (de) * | 2004-07-08 | 2006-01-26 | Robert Bosch Gmbh | Wirbelstromsensor zur Weg- oder Winkelmessung nach dem Noniusprinzip |
| WO2007000952A1 (ja) * | 2005-06-26 | 2007-01-04 | Amiteq Co., Ltd. | 位置センサ |
| JP4862336B2 (ja) * | 2005-09-29 | 2012-01-25 | 日立電線株式会社 | 回転角度センサ |
| DE102006026543B4 (de) * | 2006-06-07 | 2010-02-04 | Vogt Electronic Components Gmbh | Lagegeber und zugehöriges Verfahren zum Erfassen einer Position eines Läufers einer Maschine |
| DE202006008962U1 (de) * | 2006-06-07 | 2006-10-05 | Vogt Electronic Components Gmbh | Lagegeber zum Erfassen einer Position eines Läufers einer Maschine |
| JP4862118B2 (ja) * | 2006-07-19 | 2012-01-25 | 多摩川精機株式会社 | 角度検出器 |
-
2007
- 2007-09-19 JP JP2007242913A patent/JP4982756B2/ja active Active
-
2008
- 2008-09-01 WO PCT/JP2008/065636 patent/WO2009037957A1/ja active Application Filing
- 2008-09-01 EP EP08831987A patent/EP2192673A4/en not_active Withdrawn
- 2008-09-01 US US12/679,166 patent/US20100219725A1/en not_active Abandoned
- 2008-09-01 CN CN2008801076299A patent/CN101803154B/zh active Active
- 2008-09-01 KR KR1020107005210A patent/KR101065220B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| EP2192673A1 (en) | 2010-06-02 |
| KR101065220B1 (ko) | 2011-09-16 |
| CN101803154B (zh) | 2012-08-15 |
| CN101803154A (zh) | 2010-08-11 |
| EP2192673A4 (en) | 2013-03-13 |
| WO2009037957A1 (ja) | 2009-03-26 |
| JP2009077500A (ja) | 2009-04-09 |
| US20100219725A1 (en) | 2010-09-02 |
| KR20100046254A (ko) | 2010-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4982756B2 (ja) | モータ | |
| JP5226694B2 (ja) | 渦電流式回転角度検出用センサ | |
| US8729887B2 (en) | Rotation angle sensor | |
| JP5062450B2 (ja) | 回転磁界センサ | |
| JP2007327940A (ja) | 回転角度検出用センサシステムおよび可動部の位置検出方法 | |
| CN102187181B (zh) | 用于检测旋转部件的旋转位置的传感装置 | |
| JP2011069635A (ja) | 回転角センサ、モータ、回転角検出装置、及び電動パワーステアリング装置 | |
| JP2009025319A (ja) | 回転角度検出装置及び回転機 | |
| JP2017015696A (ja) | 相対角度検出装置、トルクセンサ、電動パワーステアリング装置及び車両 | |
| JP2020153806A (ja) | 回転角度検出装置 | |
| JP5001309B2 (ja) | 検出装置及びパワーステアリング装置 | |
| JP5759867B2 (ja) | 磁気エンコーダ | |
| JP4900838B2 (ja) | 位置検出装置及び直線駆動装置 | |
| CN109075688B (zh) | 旋转电机 | |
| JP4991991B2 (ja) | レゾルバ | |
| JP4336070B2 (ja) | 回転型位置検出装置 | |
| JP5331505B2 (ja) | 回転角度検出装置及びステアリング装置 | |
| US20120200286A1 (en) | Resolver | |
| CN107645223B (zh) | 电机总成 | |
| US20180226862A1 (en) | Rotational position detection device and motor device | |
| JP5249174B2 (ja) | 回転角センサ | |
| JP5016625B2 (ja) | 検出装置及びパワーステアリング装置 | |
| JP4217423B2 (ja) | 軸受における回転位置検出装置 | |
| JP5135277B2 (ja) | 回転型位置検出装置 | |
| JP2023008007A (ja) | 電動パワーステアリング装置及びアキシャルギャップ型電動モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120329 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4982756 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |