JP4973382B2 - 位置推定方法、及び位置推定システム - Google Patents
位置推定方法、及び位置推定システム Download PDFInfo
- Publication number
- JP4973382B2 JP4973382B2 JP2007212198A JP2007212198A JP4973382B2 JP 4973382 B2 JP4973382 B2 JP 4973382B2 JP 2007212198 A JP2007212198 A JP 2007212198A JP 2007212198 A JP2007212198 A JP 2007212198A JP 4973382 B2 JP4973382 B2 JP 4973382B2
- Authority
- JP
- Japan
- Prior art keywords
- position estimation
- target terminal
- estimated
- terminal
- anchor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 28
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 230000005540 biological transmission Effects 0.000 description 26
- 238000004364 calculation method Methods 0.000 description 20
- 238000010586 diagram Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000007476 Maximum Likelihood Methods 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000003252 repetitive effect Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000005562 fading Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
Description
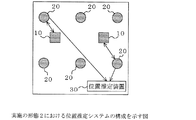
図1は実施の形態1における位置推定システムの構成を示す図である。図1において、位置推定システムは、無線信号を送受信するターゲット端末10と、既知の位置に複数配置され、無線信号を送受信するアンカー端末20と、ターゲット端末10の位置を推定する位置推定装置30とにより構成される。
アンテナ201は、無線信号を送受信するためのアンテナである。受信回路202は、アンテナ201により受信された無線信号が入力され、無線信号を処理しデジタル情報に変換し、受信データとして受信データ処理部203に出力する。また、受信回路202は、入力された無線信号をデジタル情報に変換する際に、無線信号の受信電力・遅延時間など、送信端末との距離を推定するために必要な物理量を測定し、測定した物理量の情報を受信データ処理部203に出力する。受信データ処理部203は、受信回路202より入力された受信データを処理し、送信データ生成部205に対して、受信回路202により測定された受信電力値の情報及び送信端末符号(後述)を含めた送信データ(情報信号)の作成を指示する。送信データ生成部205は、受信データ処理部203からの指示により受信データ処理部203から入力された物理量の情報及び送信端末符号、並びに当該端末固有の受信端末符号(後述)を含めた情報信号を生成し、送信回路204へ出力する。送信回路204は、送信データ生成部205で生成された情報信号(送信データ)を無線信号に変換しアンテナ201へ出力する。
次に、ターゲット端末10は、各アンカー端末20から送信された位置推定用信号を受信し、受信した位置推定用信号の受信電力値を計測して、計測した受信電力値の情報、位置推定用信号を送信した送信端末符号、位置推定用信号を受信した当該ターゲット端末10固有の識別符号(以下、「受信端末符号」という)、及び必要に応じて送信電力の情報を含めた情報信号を位置推定装置30に送信する。
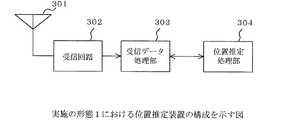
位置推定装置30は、情報信号を受信すると、受信回路302で復号処理を行い、受信データ処理部303で当該情報信号に含まれる情報を取り出す。この情報は位置推定処理部304に送られる。
次に位置推定装置30の位置推定動作の詳細について図4により説明する。
位置推定装置の位置推定処理部304は、情報信号を受信すると位置推定を開始する。まず、位置推定計算で用いる位置推定を行う領域の伝搬特性を示すパラメータである伝搬路パラメータの初期値を設定する(S101)。つまり、初回は事前に設定された所定の初期パラメータを用いる。また、後述する動作により、位置推定を行った後の場合には、ステップS105において更新された伝搬路パラメータを初期パラメータとして用いることもできる。
ここで、Pは受信電力、Tは送信電力、Rは端末間距離である。Cとαが伝搬路パラメータである。αは距離の変化に対する受信電力の変動を示すパラメータであり、一般に減衰係数と呼ばれる。Cは送受信端末間の距離を特定の距離で固定した場合の減衰量を示すパラメータである。また、位置推定用の授受信号(位置推定用信号)に遅延波が存在する場合には、遅延波数K、及び遅延プロファイルD(例えば遅延波毎の減衰係数)を推定することで、受信電力値と端末間距離とをより正確に推定することができる。また、非常に多くの無線信号が存在する場合には、平均的な特性を示すパラメータ(例えば受信電力の分散を示す係数σ)を用いることも可能である。
尚、以下で述べる伝搬路パラメータは、式1に示した2つのパラメータだけではなく、一般的に3つ以上の変数からなるパラメータの集合を指すものである。
ここで、Pは受信電力、Paveは距離をRに固定した場合における平均受信電力である。すなわち式2は、特定のアンカー端末20とターゲット端末10間の距離(以下、「送受信端末間距離R」という)における受信電力の分布は、平均受信電力を平均値とする指数分布となることを示している。
このような演算例を次に説明する。
次に、この送受信端末間距離Rを前提としたときに、当該ターゲット端末10と当該アンカー端末20との間で授受された受信電力値が、情報信号から得られた受信電力値の実測値Pとなる確率を求める。このような演算を各アンカー端末20との送受信端末間距離Rについて行い、各アンカー端末20について得られた確率を全て掛け合わせることで、はじめに仮定したターゲット端末10の位置における尤度(仮定した位置にターゲット端末10が存在する確率)が求められる。
以上の演算を位置推定の対象となる領域すべての位置について行い、尤度の最も高い点をターゲット端末10の推定位置とする。
上述したステップS102では、伝搬路パラメータを固定し、送受信端末間距離Rを変数とした空間において尤度が最大となる点を導出した。ここでは、同一の尤度を示す関数(例えば、上記式1,2)において、送受信端末間距離Rを固定し、伝搬路パラメータを変数とした空間において尤度が最大となる点を導出する。すなわち得られた受信電力値と、ステップS102で推定したターゲット端末10の位置とを前提とした場合に、最も尤度が高くなる伝搬路パラメータを推定する。
(判断1)ターゲット端末10の推定位置と、伝搬路パラメータの推定結果とが収束したと判断した場合。例えば、前回ステップS102,S103を実行した際の結果を保持しておき、前回の結果と今回の結果との差分が一定以下に達した場合は終了する。
(判断2)ステップS102,S103の演算回数が、予め決められた繰り返し演算回数に到達した場合。
(判断3)尤度関数値が繰り返しによって減少したと判断した場合(関数の種類によっては増加の場合もある。このときは存在確率が減少した場合)。
尚、保存した伝搬路パラメータの値は、後に再度位置推定を実行するときに繰り返し演算の1回目(ステップS101)の初期パラメータに用いる。これは定期的に位置推定を行っている状況においては伝搬路パラメータの大幅な変動はないと予想されることによる。従って、前回得られた伝搬路パラメータを利用することで繰り返し演算回数の削減が可能となる。
・参照用の端末が不要となる。
・エリアを分割する必要がない。
・伝搬路の特性が連続的に変化する状況においても対応が可能となる。
・位置推定対象領域のレイアウト変更などに伴う、エリアの再分割、再設定作業が不要となる。
例えば、ターゲット端末10が周辺の端末に対して位置推定用信号を送信し、アンカー端末20が情報信号を位置推定装置30に対して送信する用にしても良い。
また、ターゲット端末10が位置推定装置30の機能を有する構成とし、アンカー端末20が位置推定用信号を周辺のターゲット端末10に向けて送信し、ターゲット端末10が情報信号を送信することなく、自端末内部で自らの位置推定を実行する用にしても良い。
(1)受信データ処理部303が過去に受け取った情報信号を保存する機能を持ち、新たに情報信号を受け取った際に、当該新たに受け取った情報信号に含まれる受信電力値などの端末間の距離を推定するためのデータが、同一のアンカー端末20、ターゲット端末10間でやりとりされた過去のデータと著しく異なる場合、例えば、当該2つのデータの差分が予め定めた閾値を超えている場合などは、位置推定処理部304にデータを送らない構成とする。これにより、授受情報に大きな誤差を含む場合に当該情報を位置推定演算から除外することができ、より位置推定の精度を向上させることができる。
(a)アンカー端末20とターゲット端末10間の推定距離が一定値以上の場合。
(b)アンカー端末20とターゲット端末10が属する部屋・領域が異なる場合。
(c)アンカー端末20とターゲット端末10の推定距離から想定される受信電力値と情報信号に含まれる受信電力値との差分が一定値以上の場合。
これにより、授受情報に大きな誤差を含む場合に当該情報を位置推定演算から除外することができ、より位置推定の精度を向上させることができる。
上記実施の形態1においては、ターゲット端末10の位置を別個に推定したが、本実施の形態2では、複数のターゲット端末10の位置を同時に推定する。
次に本実施の形態2における位置推定動作の詳細について図6により説明する。
位置推定装置30の位置推定処理部304は、まず、上述した実施の形態1と同様に位置推定計算で用いる伝搬路パラメータの初期値を設定する(S201)。そして、情報信号を受信し(S202)、後述する選択方法により、以下の設定1〜3の何れかの伝搬路パラメータを選択して、当該選択した伝搬路パラメータを設定する(S203)。
(設定1)当該ターゲット端末10の過去の位置推定時に同時に推定された伝搬路パラメータを設定する。
(設定2)他のターゲット端末10の位置推定時に同時に推定された伝搬路パラメータを設定する。
(設定3)初期伝搬路パラメータを設定する。
(選択条件1)当該ターゲット端末10の推定位置がすでに存在する。
(選択条件2)一定範囲内に他のターゲット端末10の推定位置が存在し、当該ターゲット端末10の推定時間よりも後に推定されている。
上記選択条件1及び2のいずれの条件も満たす場合には、選択条件2の条件を満たしている他のターゲット端末10の位置推定時に得られた伝搬路パラメータを用いる。
選択条件1の条件のみを満たす場合には、当該ターゲット端末10の前回の位置推定時に得られた伝搬路パラメータを利用する。
いずれの条件も満たさない場合で、他のターゲット端末10の推定結果が存在している場合には、他のターゲット端末10の推定結果のうち、最も現在時刻に近い推定演算時の伝搬路パラメータを用いる。尚、現在時刻から一定の時間内に複数のデータが存在する場合には、伝搬路パラメータの平均値を用いる構成を取ることも可能である。そして、他のターゲット端末10の推定結果が存在しない場合には、初期伝搬路パラメータを用いる。
尚、このほかに、過去の位置推定時の尤度関数値を用いる方法もある。
また、過去に得られた複数の伝搬路パラメータから、最も確からしい伝搬路パラメータを用いて位置推定を行うことができるため、ターゲット端末10の推定位置の精度を向上させることができる。
(1)当該ターゲット端末10の過去の推定位置の情報が存在する場合
以下の(a),(b)双方の条件を満たすデータから、尤度関数値が最も大きいデータに含まれている伝搬路パラメータを利用する。
(a)位置推定実行時から一定範囲の時間のデータ
(b)過去の推定位置から一定範囲の領域と推定されたデータ
(2)当該ターゲット端末10の過去の推定位置が存在しない場合
位置推定実行時から一定範囲の時間のデータから、尤度関数値が最も大きいデータに含まれている伝搬路パラメータを利用する。
上記実施の形態1,2においては、ターゲット端末10の位置を推定する際に、当該ターゲット端末10と周辺のアンカー端末20との間で授受された情報を全て利用したが、本実施の形態3では、全ての情報を利用しないことによって、より正確にターゲット端末10の位置を推定する。
尚、本実施の形態3の動作においても、アンカー端末20とターゲット端末10間で授受した無線信号の受信電力値を用いた位置推定方式に、本発明を適応した例を記載するが、本発明は複数のアンカー端末20とターゲット端末10からなり、何らかの方法で位置を推定するシステムであり、各アンカー端末20とターゲット端末10との距離を何らかの方法で推定することが可能な全ての位置推定システムに適応可能である。
尚、本実施の形態3は、上記実施の形態1,2のいずれに対しても適応可能であるが、以下ではより一般的な記述とするために上記実施の形態2に対して適応した動作について説明する。
次に本実施の形態3における位置推定動作の詳細について図7により説明する。
(判断1)不使用端末として選択したアンカー端末20の数が規定数に達した場合。
(判断2)不使用端末以外のアンカー端末20(利用するアンカー端末20)の数が規定数に達した場合。
(判断3)ターゲット端末10の位置推定時の尤度関数値を、位置推定に用いたアンカー端末20の数で正規化した数値が減少に転じた場合。
(判断4)ターゲット端末10の推定位置の変化が一定値を下回る場合。例えば、前回の推定位置の結果と、今回の推定位置の結果との差分が一定以下に達した場合。
ステップS306までに得られたターゲット端末10の位置推定結果(以下、「ターゲット端末10の推定位置」という)から、各アンカー端末20とターゲット端末10の推定位置との間の距離(以下、この距離をDとする)を求めることができる。一方で、端末間で授受された情報(例えば受信電力値)から、各アンカー端末20とターゲット端末10との間の最も確からしい距離(以下、この距離をRとする)を求めることができる。
そして、例えば、|R−D|が最大となるアンカー端末20を不使用端末として選択する。
尚、不使用端末の選択数は、1つに限らず複数のアンカー端末20を不使用端末として選択しても良い。また、一旦、不使用端末として選択したアンカー端末20を変更し、不使用端末と不使用端末以外のアンカー端末20(利用するアンカー端末20)との組み合わせを変更して、再度位置推定を行うようにしても良い。
(例1)ターゲット端末10を取り付けた位置推定対象物が障害物となっている場合。
(例2)ターゲット端末10の位置によって特定のアンカー端末20との間に障害物が存在する状況。例えば位置推定平面内に柱が立っている場合などが考えられる。
(例3)特定のターゲット端末10の送信出力が何らかの原因で想定している出力と異なる場合。
Claims (11)
- ターゲット端末と、既知の位置に複数配置されるアンカー端末とが無線信号を授受し、位置推定を行う領域の伝搬特性を示すパラメータを用いて前記ターゲット端末の位置を推定する位置推定方法であって、
前記伝搬特性を示すパラメータは、無線信号から取得される前記位置推定に必要な情報から、当該無線信号を授受した前記ターゲット端末と前記アンカー端末との距離を導出するパラメータからなり、
前記ターゲット端末と前記複数のアンカー端末とが授受した無線信号から取得される位置推定に必要な情報と、前記アンカー端末の位置とに基づき、前記伝搬特性を示すパラメータを用いて、前記アンカー端末と任意の位置における前記ターゲット端末との距離を変数とし、前記位置推定に必要な情報が得られる尤度を、位置推定を行う領域の各地点について求め、位置推定を行う領域のうち、最も前記尤度が高い位置を前記ターゲット端末の推定位置として求めるステップと、
前記位置推定に必要な情報と、前記アンカー端末の位置と、前記ターゲット端末の推定位置とに基づき、前記アンカー端末と前記推定位置における前記ターゲット端末との距離を用いて、前記伝搬特性を示すパラメータを変数とし、前記位置推定に必要な情報が得られる尤度が最も高くなるパラメータを、当該推定位置における前記伝搬特性を示すパラメータとして推定するステップと、
前記伝搬特性を示すパラメータを推定したとき、当該伝搬特性を示すパラメータを用いて、前記ターゲット端末の推定位置を再度求め、当該推定位置における前記伝搬特性を示すパラメータを再度推定し、所定の条件を満たすまで前記ターゲット端末の推定位置を繰り返し求めるステップと
を有することを特徴とする位置推定方法。 - 無線信号を送受信するターゲット端末と、
既知の位置に複数配置され、無線信号を送受信するアンカー端末と、
位置推定を行う領域の伝搬特性を示すパラメータを用いて前記ターゲット端末の位置を推定する位置推定装置と
を備え、
前記伝搬特性を示すパラメータは、無線信号から取得される前記位置推定に必要な情報から、当該無線信号を授受した前記ターゲット端末と前記アンカー端末との距離を導出するパラメータからなり、
前記位置推定装置は、
前記ターゲット端末と前記複数のアンカー端末とが授受した無線信号から取得される位置推定に必要な情報と、前記アンカー端末の位置とに基づき、前記伝搬特性を示すパラメータを用いて、前記アンカー端末と任意の位置における前記ターゲット端末との距離を変数とし、前記位置推定に必要な情報が得られる尤度を、位置推定を行う領域の各地点について求め、位置推定を行う領域のうち、最も前記尤度が高い位置を前記ターゲット端末の推定位置として求め、
前記位置推定に必要な情報と、前記アンカー端末の位置と、前記ターゲット端末の推定位置とに基づき、前記アンカー端末と前記推定位置における前記ターゲット端末との距離を用いて、前記伝搬特性を示すパラメータを変数とし、前記位置推定に必要な情報が得られる尤度が最も高くなるパラメータを、当該推定位置における前記伝搬特性を示すパラメータとして推定し、
前記伝搬特性を示すパラメータを推定したとき、当該伝搬特性を示すパラメータを用いて、前記ターゲット端末の推定位置を再度求め、当該推定位置における前記伝搬特性を示すパラメータを再度推定し、所定の条件を満たすまで前記ターゲット端末の推定位置を繰り返し求める
ことを特徴とする位置推定システム。 - 前記位置推定装置は、
前記ターゲット端末の推定位置を所定回数繰り返し求めた場合、前記ターゲット端末の推定位置が収束したと判断した場合、及び、前記ターゲット端末の推定位置の確からしさを示す尤度が減少したと判断した場合、の少なくとも1つを満たしたと判断したとき、前記所定の条件を満たしたと判断することを特徴とする請求項2記載の位置推定システム。 - 前記位置推定装置は、
前記伝搬特性を示すパラメータを推定する度に、該伝搬特性を示すパラメータの情報を保存し、
保存した前記伝搬特性を示すパラメータを用いて、前記ターゲット端末の位置を推定することを特徴とする請求項2又は3記載の位置推定システム。 - 前記位置推定装置は、
前記ターゲット端末の推定位置の情報又は前記位置推定に必要な情報を保存し、当該保存された情報を用いて、新たに取得した前記位置推定に必要な情報を前記ターゲット端末の位置推定に利用するか否かを判断することを特徴とする請求項2〜4の何れかに記載の位置推定システム。 - 前記位置推定装置は、
新たに取得した前記位置推定に必要な情報に基づき求めた前記ターゲット端末の推定位置と、保存された前記ターゲット端末の推定位置又は保存された前記位置推定に必要な情報に基づき求めた前記ターゲット端末の推定位置との距離差が、所定値以上のとき、
新たに取得した当該位置推定に必要な情報を前記ターゲット端末の位置推定に利用しないことを特徴とする請求項5記載の位置推定システム。 - 前記位置推定装置は、
前記位置推定に必要な情報を取得する度に保存し、任意の前記アンカー端末又は前記ターゲット端末からの前記位置推定に必要な情報が得られないとき、保存された前記位置推定に必要な情報を用いて、前記ターゲット端末の位置を推定することを特徴とする請求項2〜6記載の位置推定システム。 - 前記ターゲット端末を複数備え、
前記位置推定装置は、
前記複数のターゲット端末のうち、任意のターゲット端末の推定位置を求め、当該推定位置における前記伝搬特性を示すパラメータを推定して、該伝搬特性を示すパラメータの情報を保存し、
保存した前記伝搬特性を示すパラメータの情報を用いて、当該ターゲット端末以外の他のターゲット端末の推定位置を求めることを特徴とする請求項2〜7の何れかに記載の位置推定システム。 - 前記位置推定装置は、
前記ターゲット端末の推定位置を求めたとき、当該推定位置の推定の確からしさを示す尤度を保存し、
保存した前記尤度を用いて、保存された前記伝搬特性を示すパラメータの情報を選択し、
選択した当該伝搬特性を示すパラメータの情報を用いて、前記ターゲット端末の推定位置を求めることを特徴とする請求項8記載の位置推定システム。 - 前記位置推定装置は、
前記複数のアンカー端末のうち、1又は複数のアンカー端末を不使用端末として選択し、
前記選択した不使用端末以外の前記複数のアンカー端末と前記ターゲット端末とが授受した無線信号から取得される位置推定に必要な情報を利用して、前記ターゲット端末の推定位置を求めることを特徴とする請求項2〜9の何れかに記載の位置推定システム。 - 前記位置推定装置は、
前記不使用端末の選択を変更し、前記不使用端末と当該不使用端末以外の前記アンカー端末との組み合わせを変更して、所定の条件を満たすまで前記ターゲット端末の推定位置を繰り返し求めることを特徴とする請求項10記載の位置推定システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007212198A JP4973382B2 (ja) | 2007-08-16 | 2007-08-16 | 位置推定方法、及び位置推定システム |
| US12/219,039 US7791538B2 (en) | 2007-08-16 | 2008-07-15 | Location estimation method and system, and wireless device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007212198A JP4973382B2 (ja) | 2007-08-16 | 2007-08-16 | 位置推定方法、及び位置推定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009047487A JP2009047487A (ja) | 2009-03-05 |
| JP4973382B2 true JP4973382B2 (ja) | 2012-07-11 |
Family
ID=40362564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007212198A Active JP4973382B2 (ja) | 2007-08-16 | 2007-08-16 | 位置推定方法、及び位置推定システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7791538B2 (ja) |
| JP (1) | JP4973382B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5332878B2 (ja) * | 2009-04-28 | 2013-11-06 | 富士通株式会社 | 測位システム |
| US8521429B2 (en) | 2009-06-17 | 2013-08-27 | Microsoft Corporation | Accuracy assessment for location estimation systems |
| US8698671B2 (en) * | 2009-10-16 | 2014-04-15 | Qualcomm Incorporated | Binning venues into categories based on propagation characteristics |
| WO2012095922A1 (en) * | 2011-01-13 | 2012-07-19 | Panasonic Corporation | Method for determination of wireless terminals positions and associated system and apparatus thereof |
| US8504288B2 (en) | 2011-05-11 | 2013-08-06 | Google Inc. | Quality control of mapping data |
| US8583400B2 (en) | 2011-05-13 | 2013-11-12 | Google Inc. | Indoor localization of mobile devices |
| CA2840250C (en) * | 2011-06-30 | 2019-05-21 | Trusted Positioning Inc. | An improved system and method for wireless positioning in wireless network-enabled environments |
| US8386422B1 (en) | 2011-07-08 | 2013-02-26 | Google Inc. | Using constructed paths to supplement map data |
| US8548738B1 (en) | 2011-07-08 | 2013-10-01 | Google Inc. | Constructing paths based on a particle model |
| EP2584372B1 (en) * | 2011-10-17 | 2016-05-18 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | RSS based positioning method with limited sensitivity receiver |
| EP2584371B1 (en) * | 2011-10-17 | 2016-12-21 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | Range estimation method based on RSS measurement with limited sensitivity receiver |
| EP2584849B1 (en) | 2011-10-17 | 2019-02-27 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | Method for node positioning for a wireless network |
| JP2013250213A (ja) * | 2012-06-01 | 2013-12-12 | Ricoh Co Ltd | 通信装置、情報処理端末及び通信システム |
| KR101756819B1 (ko) | 2013-12-16 | 2017-07-17 | 한양대학교 기술지주회사(주) | Range-Free방식의 노드 측위 방법 |
| KR101591423B1 (ko) | 2014-08-19 | 2016-02-04 | 주식회사 아이티원 | 위치 추정 방법 및 그 장치 |
| JP6641778B2 (ja) * | 2015-08-14 | 2020-02-05 | 沖電気工業株式会社 | 位置推定システム、位置推定方法及び無線装置 |
| JP6575002B2 (ja) * | 2015-09-29 | 2019-09-18 | 公立大学法人大阪 | 位置推定装置、位置推定方法、及び位置推定プログラム |
| JP6634350B2 (ja) * | 2016-06-24 | 2020-01-22 | 株式会社東芝 | 推定装置、方法、及び推定システム |
| US10627479B2 (en) * | 2017-05-17 | 2020-04-21 | Zerokey Inc. | Method for determining the position of an object and system employing same |
| JP7135427B2 (ja) * | 2018-05-15 | 2022-09-13 | 日本電気株式会社 | 処理装置、方法、プログラム及びシステム |
| CN113196099B (zh) * | 2018-12-14 | 2023-12-29 | 电装国际美国公司 | 确定实时位置的系统和方法 |
| US20220269962A1 (en) * | 2019-07-16 | 2022-08-25 | Nippon Telegraph And Telephone Corporation | Estimating device, estimating method, and estimating program |
| JP7313008B2 (ja) * | 2019-08-02 | 2023-07-24 | パナソニックIpマネジメント株式会社 | 位置推定装置、位置推定システム、及び、位置推定方法 |
| JP7604463B2 (ja) | 2019-08-29 | 2024-12-23 | エルジー エレクトロニクス インコーポレイティド | 無線通信システムにおけるユーザ機器による方法 |
| JP7361087B2 (ja) * | 2021-12-01 | 2023-10-13 | ソフトバンク株式会社 | 測位システム、設置補助装置、管理装置、測位方法及びプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001359146A (ja) * | 2000-06-14 | 2001-12-26 | Nippon Telegr & Teleph Corp <Ntt> | 無線移動端末の位置検出方法 |
| JP3777299B2 (ja) * | 2000-11-20 | 2006-05-24 | 日本電信電話株式会社 | 無線移動端末の位置検出方法 |
| US6473038B2 (en) | 2001-01-05 | 2002-10-29 | Motorola, Inc. | Method and apparatus for location estimation |
| JP2006003187A (ja) * | 2004-06-17 | 2006-01-05 | Hitachi Ltd | 無線ネットワークシステム |
| JP4444879B2 (ja) | 2005-05-24 | 2010-03-31 | 日本電信電話株式会社 | 位置検出方法、位置検出システム、位置検出プログラム及びそのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| US20080220780A1 (en) * | 2007-03-07 | 2008-09-11 | Honeywell International Inc. | Method for the automatic calibration of location anchors |
| JP2009076958A (ja) * | 2007-09-18 | 2009-04-09 | Oki Electric Ind Co Ltd | 無線通信制御装置、ノード、無線システム及び情報処理装置 |
-
2007
- 2007-08-16 JP JP2007212198A patent/JP4973382B2/ja active Active
-
2008
- 2008-07-15 US US12/219,039 patent/US7791538B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009047487A (ja) | 2009-03-05 |
| US7791538B2 (en) | 2010-09-07 |
| US20090046013A1 (en) | 2009-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4973382B2 (ja) | 位置推定方法、及び位置推定システム | |
| US20120184219A1 (en) | Method and apparatus for learning of the parameters of a fingerprint prediction map model | |
| US8692667B2 (en) | Methods and apparatus for distributed learning of parameters of a fingerprint prediction map model | |
| JP2008241684A (ja) | 位置推定方法、位置推定システム及び無線端末 | |
| US20130150073A1 (en) | Methods and apparatus for updating information used in generating a signal prediction map | |
| WO2013061586A1 (ja) | スペクトル制御システム、データベース、スペクトル制御方法及びスペクトル制御プログラムが格納された非一時的なコンピュータ可読媒体 | |
| JP6627752B2 (ja) | 無線通信システムにおける無線通信制御方法および装置、ならびに無線通信装置 | |
| JP6582945B2 (ja) | 無線通信システム、無線通信方法、送信装置、及び、送信方法 | |
| JP2012100153A (ja) | 電波伝搬特性推定システム、電波伝搬特性推定方法、およびコンピュータプログラム | |
| JP2017032469A (ja) | 無線機器配置推定装置、無線機器配置推定方法、無線機器配置推定プログラム | |
| JP6634350B2 (ja) | 推定装置、方法、及び推定システム | |
| JP7170893B2 (ja) | 電子装置、方法、プログラム、および通信システム | |
| JP6575002B2 (ja) | 位置推定装置、位置推定方法、及び位置推定プログラム | |
| JP5699544B2 (ja) | 電波伝搬特性推定システム、電波伝搬特性推定方法、およびコンピュータプログラム | |
| WO2017037985A1 (ja) | 移動無線端末および制御方法 | |
| JP6292296B2 (ja) | 周波数割り当て装置、周波数割り当て方法及び無線通信システム | |
| CN104507160A (zh) | 无线网络定位方法、接入点及定位服务器 | |
| JP2007306540A (ja) | 位置推定方法及び位置推定システム並びに無線通信端末 | |
| Mardeni et al. | Path loss model development for indoor signal loss prediction at 2.4 GHz 802.11 n network | |
| WO2020124343A1 (en) | Handling of impaired antenna branch | |
| WO2019239818A1 (ja) | 干渉源探索方法及び干渉源探索装置 | |
| KR101488378B1 (ko) | 와이파이 장치의 위치 추적을 위한 효과적인 채널 검색 장치 및 방법 | |
| JP5266976B2 (ja) | 端末位置決定方法、端末位置決定プログラム、端末位置決定装置 | |
| JP7082879B2 (ja) | 干渉電力推定装置および干渉電力推定方法 | |
| JP2017143407A (ja) | 通信管理装置、通信管理方法及び通信管理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111025 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120313 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120326 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4973382 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150420 Year of fee payment: 3 |