JP4931429B2 - 移動航跡表示装置 - Google Patents
移動航跡表示装置 Download PDFInfo
- Publication number
- JP4931429B2 JP4931429B2 JP2006033189A JP2006033189A JP4931429B2 JP 4931429 B2 JP4931429 B2 JP 4931429B2 JP 2006033189 A JP2006033189 A JP 2006033189A JP 2006033189 A JP2006033189 A JP 2006033189A JP 4931429 B2 JP4931429 B2 JP 4931429B2
- Authority
- JP
- Japan
- Prior art keywords
- wake
- information
- track information
- display
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Radar Systems Or Details Thereof (AREA)
Description
細線化処理指令を受けて、前記表示用メモリから原航跡情報を入力し、原航跡情報の中央部分を残す細線化処理を施して細線化航跡情報を作成し、この細線化航跡情報を前記表示用メモリへ出力し、対応する原航跡情報に代えて記憶させるデータ変換部を有し、
前記データ変換部は、
さらに直線化処理指令を受けて、前記表示用メモリから細線化航跡情報を入力し、抽出した抽出化直線をその始点と終点の位置を表す数値データに変換する直線化処理を施して直線化航跡情報を作成し、この直線化航跡情報に基づく直線を前記表示メモリへ出力し、対応する細線化航跡情報に代えて記憶させることを特徴とする。
細線化された細線化航跡情報を含む対象画像をスキャンして、値を持つピクセルを対象ピクセルとして、隣接する対象ピクセルを順次検出し、
一番目の対象ピクセルとn番目(n≧2)の対象ピクセルとを結ぶ直線を中心として幅がmピクセル(m≧2)の直線抽出帯を形成し、
前記n番目の対象ピクセルから前記直線抽出帯と重ならない対象ピクセルの直前の対象ピクセルと、一番目の対象ピクセルとを結ぶ直線を抽出して抽出化直線とすることを特徴とする。
前記データ変換部には、処理範囲指定信号が入力され、前記直線化処理及びまたは細線化処理を行う範囲を指定することを特徴とする。
細線化処理指令を受けて、前記表示用メモリから原航跡情報を入力し、原航跡情報の中央部分を残す細線化処理を施して細線化航跡情報を作成し、この細線化航跡情報を前記表示用メモリへ出力し、対応する原航跡情報に代えて記憶させるデータ変換部を有し、
前記細線化処理は、複数本の航跡情報が重畳した原航跡情報の各ピクセルのデータを互いに範囲が重ならない複数のデータ範囲に区分し、その各データ範囲毎に細線化処理を行って、細線化された航跡情報を得ることを特徴とする。
条件(1)P1=0且つP2=0且つP8=0且つP4≠0且つP5≠0且つP6≠0
条件(2)P1=0且つP8=0且つP7=0且つP3≠0且つP4≠0且つP5≠0
条件(3)P6=0且つP7=0且つP8=0且つP2≠0且つP3≠0且つP4≠0
この条件(1)〜(3)でのスキャンが終了したときに、ゼロ候補ピクセルとなっているピクセルのデータをゼロにする。
条件(4)P4=0且つP5=0且つP6=0且つP1≠0且つP2≠0且つP8≠0
条件(5)P3=0且つP4=0且つP5=0且つP1≠0且つP8≠0且つP7≠0
条件(6)P2=0且つP3=0且つP4=0且つP6≠0且つP7≠0且つP8≠0
この条件(4)〜(6)でのスキャンが終了したときに、ゼロ候補ピクセルとなっているピクセルのデータをゼロにする。
条件(7)P2=0且つP3=0且つP4=0且つP6≠0且つP7≠0且つP8≠0
条件(8)P1=0且つP2=0且つP3=0且つP5≠0且つP6≠0且つP7≠0
条件(9)P8=0且つP1=0且つP2=0且つP4≠0且つP5≠0且つP6≠0
この条件(7)〜(9)でのスキャンが終了したときに、ゼロ候補ピクセルとなっているピクセルのデータをゼロにする。
条件(10)P6=0且つP7=0且つP8=0且つP2≠0且つP3≠0且つP4≠0
条件(11)P5=0且つP6=0且つP7=0且つP1≠0且つP2≠0且つP3≠0
条件(12)P4=0且つP5=0且つP6=0且つP8≠0且つP1≠0且つP2≠0
この条件(10)〜(12)でのスキャンが終了したときに、ゼロ候補ピクセルとなっているピクセルのデータをゼロにする。
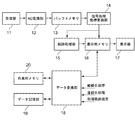
12 A/D変換部
13 バッファメモリ
14 信号処理座標変換部
15 航跡処理部
16 表示用メモリ
17 表示器
18 データ変換部
19 データ記憶部
20 作業用メモリ
A 原航跡情報
B 細線化航跡情報
C 直線化航跡情報
Claims (5)
- 送信信号を送信し物標からの反射波を受信する探知装置による受信信号に基づいて、前記探知装置の周囲に存在する物標の位置が、過去所定時間から現在までにどのように変化したかを表す原航跡情報を作成する航跡処理部と、該航跡処理部からの原航跡情報を記憶し、表示部へ出力し得る表示用メモリとを備える移動航跡表示装置において、
細線化処理指令を受けて、前記表示用メモリから原航跡情報を入力し、原航跡情報の中央部分を残す細線化処理を施して細線化航跡情報を作成し、この細線化航跡情報を前記表示用メモリへ出力し、対応する原航跡情報に代えて記憶させるデータ変換部を有し、
前記データ変換部は、
さらに直線化処理指令を受けて、前記表示用メモリから細線化航跡情報を入力し、抽出した抽出化直線をその始点と終点の位置を表す数値データに変換する直線化処理を施して直線化航跡情報を作成し、この直線化航跡情報に基づく直線を前記表示メモリへ出力し、対応する細線化航跡情報に代えて記憶させることを特徴とする、移動航跡表示装置。 - 前記直線化処理は、
細線化された細線化航跡情報を含む対象画像をスキャンして、値を持つピクセルを対象ピクセルとして、隣接する対象ピクセルを順次検出し、
一番目の対象ピクセルとn番目(n≧2)の対象ピクセルとを結ぶ直線を中心として幅がmピクセル(m≧2)の直線抽出帯を形成し、
前記n番目の対象ピクセルから前記直線抽出帯と重ならない対象ピクセルの直前の対象ピクセルと、一番目の対象ピクセルとを結ぶ直線を抽出して抽出化直線とすることを特徴とする、請求項1に記載の移動航跡表示装置。 - 前記抽出化直線の始点と終点の位置を表す数値データを、不揮発性のメモリを有するデータ記憶部に読み出し可能に記憶することを特徴とする、請求項1または2に記載の移動航跡表示装置。
- 前記データ変換部には、処理範囲指定信号が入力され、前記直線化処理及びまたは細線化処理を行う範囲を指定することを特徴とする、請求項1ないし3のいずれかに記載の移動航跡表示装置。
- 送信信号を送信し物標からの反射波を受信する探知装置による受信信号に基づいて、前記探知装置の周囲に存在する物標の位置が、過去所定時間から現在までにどのように変化したかを表す原航跡情報を作成する航跡処理部と、該航跡処理部からの原航跡情報を記憶し、表示部へ出力し得る表示用メモリとを備える移動航跡表示装置において、
細線化処理指令を受けて、前記表示用メモリから原航跡情報を入力し、原航跡情報の中央部分を残す細線化処理を施して細線化航跡情報を作成し、この細線化航跡情報を前記表示用メモリへ出力し、対応する原航跡情報に代えて記憶させるデータ変換部を有し、
前記細線化処理は、複数本の航跡情報が重畳した原航跡情報の各ピクセルのデータを互いに範囲が重ならない複数のデータ範囲に区分し、その各データ範囲毎に細線化処理を行って、細線化された航跡情報を得ることを特徴とする、移動航跡表示装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006033189A JP4931429B2 (ja) | 2006-02-10 | 2006-02-10 | 移動航跡表示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006033189A JP4931429B2 (ja) | 2006-02-10 | 2006-02-10 | 移動航跡表示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007212319A JP2007212319A (ja) | 2007-08-23 |
| JP4931429B2 true JP4931429B2 (ja) | 2012-05-16 |
Family
ID=38490898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006033189A Active JP4931429B2 (ja) | 2006-02-10 | 2006-02-10 | 移動航跡表示装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4931429B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8039532B2 (en) | 2007-08-16 | 2011-10-18 | Fujifilm Corporation | Heterocyclic compound, ultraviolet absorbent and composition containing the same |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5421191A (en) * | 1977-07-19 | 1979-02-17 | Koden Electronics Co Ltd | Wake recorder |
| JPS60157680A (ja) * | 1984-01-27 | 1985-08-17 | Matsushita Electric Ind Co Ltd | 細線化処理装置 |
| JPH0627801B2 (ja) * | 1988-06-01 | 1994-04-13 | 古野電気株式会社 | 航跡表示装置 |
| JPH0452583A (ja) * | 1990-06-21 | 1992-02-20 | Furuno Electric Co Ltd | 航跡記憶表示装置 |
-
2006
- 2006-02-10 JP JP2006033189A patent/JP4931429B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007212319A (ja) | 2007-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4917270B2 (ja) | レーダ装置および類似装置 | |
| JP5570786B2 (ja) | 信号処理装置、レーダ装置及び信号処理プログラム | |
| JP5658871B2 (ja) | 信号処理装置、レーダ装置、信号処理プログラム及び信号処理方法 | |
| JP5654223B2 (ja) | 画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム | |
| JP6150418B2 (ja) | 情報表示装置、魚群探知機及び情報表示方法 | |
| JP5416935B2 (ja) | レーダ装置および類似装置、画像表示方法 | |
| CN106997043B (zh) | 雷达装置以及物标追踪方法 | |
| CN102798841A (zh) | 影像显示装置以及雷达装置 | |
| WO1989012237A1 (en) | Track display apparatus | |
| JP4931429B2 (ja) | 移動航跡表示装置 | |
| JP5144005B2 (ja) | 水中探知装置 | |
| JP5662671B2 (ja) | 物標探知装置、物標探知方法、および物標探知プログラム | |
| JP7021025B2 (ja) | エコー信号処理装置、エコー信号処理システム、及びエコー信号処理方法 | |
| JP4164406B2 (ja) | レーダ装置および類似装置 | |
| JP6526531B2 (ja) | レーダ装置 | |
| JPWO2017163716A1 (ja) | レーダ装置及び航跡表示方法 | |
| JP3609150B2 (ja) | 海図表示方法 | |
| JP2003315439A (ja) | 舶用レーダ装置 | |
| JP6006750B2 (ja) | 信号処理装置、レーダ装置及び信号処理方法 | |
| JP4197635B2 (ja) | レーダ装置および類似装置 | |
| JP7216610B2 (ja) | データ処理装置、データ処理方法、およびプログラム | |
| JP4886502B2 (ja) | スキャンコンバータ、レーダ装置、及びスキャンコンバート方法 | |
| KR0142683B1 (ko) | 레이다 장치 | |
| JP2023183936A (ja) | 目標検出装置およびレーダ装置 | |
| JP4886622B2 (ja) | スキャンコンバータ、レーダ装置及びスキャンコンバート方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090127 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20090130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111122 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120214 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4931429 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |