JP4899367B2 - 俯瞰画像表示システム及び俯瞰画像の表示方法 - Google Patents
俯瞰画像表示システム及び俯瞰画像の表示方法 Download PDFInfo
- Publication number
- JP4899367B2 JP4899367B2 JP2005217042A JP2005217042A JP4899367B2 JP 4899367 B2 JP4899367 B2 JP 4899367B2 JP 2005217042 A JP2005217042 A JP 2005217042A JP 2005217042 A JP2005217042 A JP 2005217042A JP 4899367 B2 JP4899367 B2 JP 4899367B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- overhead
- bird
- ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 28
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 152
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 151
- 238000012545 processing Methods 0.000 claims description 123
- 238000001514 detection method Methods 0.000 claims description 21
- 230000015572 biosynthetic process Effects 0.000 claims description 18
- 238000003786 synthesis reaction Methods 0.000 claims description 18
- 239000000203 mixture Substances 0.000 claims description 7
- 238000003384 imaging method Methods 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 description 79
- 230000006399 behavior Effects 0.000 description 21
- 230000015654 memory Effects 0.000 description 14
- 239000002131 composite material Substances 0.000 description 12
- 238000010586 diagram Methods 0.000 description 3
- 230000001131 transforming effect Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 2
- 230000002194 synthesizing effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images















Description
そして、被撮影領域の重複する部分において、2つの俯瞰画像を構成する各画素を所定の割合で交互に配置して1つの俯瞰画像として合成する際に、車両の挙動を表す車両情報が車両の前進、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向の重複部分において、前方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合を後方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両情報が車両の後退、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向と逆側の重複部分において、操舵方向と逆側の側方カメラの撮影画像を変換した俯瞰画像の割合を前方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定する。
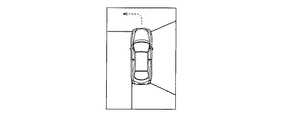
まず、本発明の第1の参考形態について説明する。本参考形態の俯瞰画像表示システムは、4つの車載カメラで撮影された撮影画像を俯瞰画像に変換すると共に繋ぎ合わせることで、車両周囲全域を表す1つの連続した俯瞰表示画像を作成して表示するにあたり、車両の挙動に応じて俯瞰表示画像の繋ぎ目位置を最適な位置に設定して、運転者が確実に確認しておきたい領域で画像に不連続性が生じることのない俯瞰表示画像を表示できるようにしたものである。
次に、本発明の第2の参考形態について説明する。本参考形態の俯瞰画像表示システムは、4つの車載カメラで撮影された撮影画像を俯瞰画像に変換すると共に繋ぎ合わせることで、車両周囲全域を表す1つの連続した俯瞰表示画像を作成して表示するにあたり、車両の乗員の操作入力に応じて俯瞰表示画像の繋ぎ目位置を最適な位置に設定して、運転者が確実に確認しておきたい領域で画像に不連続性が生じることのない俯瞰表示画像を表示できるようにしたものである。なお、本参考形態の俯瞰画像表示システムにおけるその他の部分は上述した第1の参考形態の俯瞰画像表示システムと同様であるので、以下、第1の参考形態と同様の部分については同一の符号を付して重複した説明を省略し、本参考形態に特徴的な部分についてのみ説明する。
次に、本発明の第1の実施形態について説明する。本実施形態の俯瞰画像表示システムは、4つの車載カメラで撮影された撮影画像を俯瞰画像に変換し、隣り合う車載カメラの被撮影領域が重複する各オーバーラップエリアOA1,OA2,OA3,OA4においては隣り合う車載カメラの撮影画像を変換した俯瞰画像を合成して、車両周囲全域を表す1つの連続した俯瞰表示画像を作成して表示するにあたり、車両の挙動に応じて俯瞰表示画像の合成部分における合成の割合を最適な値に設定して、運転者が確実に確認しておきたい領域で画像に不連続性が生じることのない俯瞰表示画像を表示できるようにしたものである。なお、本実施形態の俯瞰画像表示システムにおけるその他の部分は上述した第1の参考形態の俯瞰画像表示システムと同様であるので、以下、第1の参考形態と同様の部分については同一の符号を付して重複した説明を省略し、本実施形態に特徴的な部分についてのみ説明する。
次に、本発明の第3の参考形態について説明する。本参考形態の俯瞰画像表示システムは、4つの車載カメラで撮影された撮影画像を俯瞰画像に変換し、隣り合う車載カメラの被撮影領域が重複する各オーバーラップエリアOA1,OA2,OA3,OA4においては隣り合う車載カメラの撮影画像を変換した俯瞰画像を合成して、車両周囲全域を表す1つの連続した俯瞰表示画像を作成して表示するにあたり、車両の乗員の操作入力に応じて俯瞰表示画像の合成部分における合成の割合を最適な値に設定して、運転者が確実に確認しておきたい領域で画像に不連続性が生じることのない俯瞰表示画像を表示できるようにしたものである。なお、本参考形態の俯瞰画像表示システムにおけるその他の部分は上述した第1の実施形態の俯瞰画像表示システムと同様であるので、以下、第1の実施形態と同様の部分については同一の符号を付して重複した説明を省略し、本参考形態に特徴的な部分についてのみ説明する。
12 後方カメラ
13 右側方カメラ
14 左側方カメラ
21 舵角センサ
22 車速センサ
23 シフト位置センサ
30 画像処理装置
34 変換処理部
35 記憶部
Claims (8)
- 一部が重複する車両周囲の複数の被撮影領域の画像を各々撮影する複数の車載カメラと、
前記複数の車載カメラにより撮影された撮影画像をそれぞれ俯瞰画像に変換し、前記被撮影領域の重複する部分においてこれら俯瞰画像を合成して、1つの連続した俯瞰表示画像を作成する画像処理装置と、
前記画像処理装置により作成された俯瞰表示画像を表示する表示装置とを備えた俯瞰画像表示システムであって、
前記画像処理装置は、前記被撮影領域の重複する部分において、2つの俯瞰画像を構成する各画素を所定の割合で交互に配置して1つの俯瞰画像として合成するものであり、前記俯瞰表示画像の合成部分における前記割合を任意に設定する合成割合設定手段と、
車両の挙動を表す車両情報を検出する車両情報検出手段と、を有し、
前記合成割合設定手段は、
前記車両情報検出手段により検出された車両情報が前進、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向の重複部分において、前方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合を後方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、
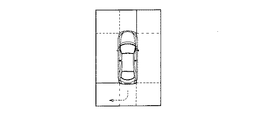
前記車両情報検出手段により検出された車両情報が後退、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向と逆側の重複部分において、操舵方向と逆側の側方カメラの撮影画像を変換した俯瞰画像の割合を前方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定することを特徴とする俯瞰画像表示システム。 - 前記車両情報検出手段により検出された車両情報が前進、且つ所定角度以上の右方向操舵角を示している場合には、車両前方の右方向の重複部分において、前方カメラの撮影画像を変換した俯瞰画像の割合を右側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の右方向の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を右側方カメラの撮影画像を変換した俯瞰画像の割合より小さくなるように設定することを特徴とする請求項1に記載の俯瞰画像表示システム。
- 前記車両情報検出手段により検出された車両情報が前進、且つ所定角度以上の左方向操舵角を示している場合には、車両前方の左方向の重複部分において、前方カメラの撮影画像を変換した俯瞰画像の割合を左側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の左方向の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を左側方カメラの撮影画像を変換した俯瞰画像の割合より小さくなるように設定することを特徴とする請求項1に記載の俯瞰画像表示システム。
- 前記車両情報検出手段により検出された車両情報が後退、且つ所定角度以上の右方向操舵角を示している場合には、車両左前方の重複部分において、左側方カメラの撮影画像を変換した俯瞰画像の割合を前方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両右後方の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を右側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定することを特徴とする請求項1に記載の俯瞰画像表示システム。
- 前記車両情報検出手段により検出された車両情報が後退、且つ所定角度以上の左方向操舵角を示している場合には、車両右前方の重複部分において、右側方カメラの撮影画像を変換した俯瞰画像の割合を前方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両左後方の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を左側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定することを特徴とする請求項1に記載の俯瞰画像表示システム。
- 前記車両情報検出手段により検出された車両情報が停止または直進を示している場合には、前記重複領域の全てにおいて前記割合が等しくなるように設定することを特徴とする請求項1乃至5の何れか1項に記載の俯瞰画像表示システム。
- 前記車両情報検出手段により検出された車両情報が所定速度以上の前進を示している場合には、車両右前方及び車両右後方の前記重複領域において、右側方カメラの撮影画像を変換した俯瞰画像の割合を車両前方カメラまたは車両後方カメラの撮影画像を変換した俯瞰画像の割合よりも大きくなるように設定し、また、車両左前方及び車両左後方の前記重複領域において、左側方カメラの撮影画像を変換した俯瞰画像の割合を車両前方カメラまたは車両後方カメラの撮影画像を変換した俯瞰画像の割合よりも大きくなるように設定することを特徴とする請求項1乃至6の何れか1項に記載の俯瞰画像表示システム。
- 一部が重複する車両周囲の複数の被撮影領域の画像を複数の車載カメラで各々撮影し、これら複数の車載カメラにより撮影された撮影画像をそれぞれ俯瞰画像に変換し、前記被撮影領域の重複する部分においてこれら俯瞰画像を合成して、1つの連続した俯瞰表示画像として表示装置に表示する俯瞰画像の表示方法であって、
前記被撮影領域の重複する部分において、2つの俯瞰画像を構成する各画素を所定の割合で交互に配置して1つの俯瞰画像として合成する際に、車両の挙動を表す車両情報が車両の前進、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向の重複部分において、前方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合を後方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、
前記車両情報が車両の後退、且つ所定角度以上の操舵角を示している場合には、車両前方の操舵角方向と逆側の重複部分において、操舵方向と逆側の側方カメラの撮影画像を変換した俯瞰画像の割合を前方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定し、車両後方の操舵角方向の重複部分において、後方カメラの撮影画像を変換した俯瞰画像の割合を操舵方向の側方カメラの撮影画像を変換した俯瞰画像の割合より大きくなるように設定することを特徴とする俯瞰画像の表示方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005217042A JP4899367B2 (ja) | 2005-07-27 | 2005-07-27 | 俯瞰画像表示システム及び俯瞰画像の表示方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005217042A JP4899367B2 (ja) | 2005-07-27 | 2005-07-27 | 俯瞰画像表示システム及び俯瞰画像の表示方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007036668A JP2007036668A (ja) | 2007-02-08 |
| JP4899367B2 true JP4899367B2 (ja) | 2012-03-21 |
Family
ID=37795375
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005217042A Active JP4899367B2 (ja) | 2005-07-27 | 2005-07-27 | 俯瞰画像表示システム及び俯瞰画像の表示方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4899367B2 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5112998B2 (ja) | 2008-09-16 | 2013-01-09 | 本田技研工業株式会社 | 車両周囲監視装置 |
| JP5182042B2 (ja) | 2008-11-28 | 2013-04-10 | 富士通株式会社 | 画像処理装置、画像処理方法及びコンピュータプログラム |
| JP5405809B2 (ja) * | 2008-12-04 | 2014-02-05 | アルパイン株式会社 | 車両周辺監視装置およびカメラ位置・姿勢判定方法 |
| JP2010183170A (ja) | 2009-02-03 | 2010-08-19 | Denso Corp | 車両用表示装置 |
| JP5439890B2 (ja) | 2009-03-25 | 2014-03-12 | 富士通株式会社 | 画像処理方法、画像処理装置及びプログラム |
| JP5077307B2 (ja) * | 2009-08-05 | 2012-11-21 | 株式会社デンソー | 車両周囲画像表示制御装置 |
| CN101995239B (zh) * | 2009-08-11 | 2012-05-23 | 财团法人车辆研究测试中心 | 利用鸟瞰影像判断障碍物的系统及方法 |
| TWI392366B (zh) | 2009-12-31 | 2013-04-01 | Ind Tech Res Inst | 全周鳥瞰影像距離介面產生方法與系統 |
| JP5479956B2 (ja) | 2010-03-10 | 2014-04-23 | クラリオン株式会社 | 車両用周囲監視装置 |
| JP5548002B2 (ja) | 2010-03-25 | 2014-07-16 | 富士通テン株式会社 | 画像生成装置、画像表示システム及び画像生成方法 |
| JP5592138B2 (ja) | 2010-03-31 | 2014-09-17 | 富士通テン株式会社 | 画像生成装置、画像表示システム及び画像生成方法 |
| JP5476216B2 (ja) * | 2010-06-01 | 2014-04-23 | クラリオン株式会社 | 車両用周囲監視装置 |
| JP5699679B2 (ja) | 2011-02-24 | 2015-04-15 | 富士通セミコンダクター株式会社 | 画像処理装置、画像処理システム、及び画像処理方法 |
| WO2013046593A1 (ja) * | 2011-09-30 | 2013-04-04 | パナソニック株式会社 | 俯瞰画像生成装置、俯瞰画像生成方法、および俯瞰画像生成プログラム |
| US10046700B2 (en) | 2012-05-22 | 2018-08-14 | Mitsubishi Electric Corporation | Image processing device |
| TWI578271B (zh) | 2012-10-23 | 2017-04-11 | 義晶科技股份有限公司 | 動態影像處理方法以及動態影像處理系統 |
| TWI494899B (zh) | 2012-12-19 | 2015-08-01 | Ind Tech Res Inst | 影像內週期性雜訊修補方法 |
| JP6349637B2 (ja) * | 2013-07-11 | 2018-07-04 | 株式会社デンソー | 車両用画像合成装置 |
| JP6321977B2 (ja) * | 2014-01-23 | 2018-05-09 | クラリオン株式会社 | 重機用周辺監視装置 |
| JP6620733B2 (ja) * | 2016-12-13 | 2019-12-18 | 株式会社デンソー | 認識装置 |
| JP7231825B2 (ja) * | 2019-04-18 | 2023-03-02 | 日本電信電話株式会社 | 映像処理装置、映像処理方法及び映像処理プログラム |
| KR102281609B1 (ko) * | 2020-01-16 | 2021-07-29 | 현대모비스 주식회사 | 어라운드뷰 합성 시스템 및 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04119087A (ja) * | 1990-09-07 | 1992-04-20 | Nippon Telegr & Teleph Corp <Ntt> | 画像情報合成端末装置 |
| JP3300337B2 (ja) * | 2000-04-28 | 2002-07-08 | 松下電器産業株式会社 | 画像処理装置および監視システム |
| JP3372944B2 (ja) * | 2000-07-19 | 2003-02-04 | 松下電器産業株式会社 | 監視システム |
| JP3695319B2 (ja) * | 2000-11-30 | 2005-09-14 | トヨタ自動車株式会社 | 車両周辺モニタ装置 |
| JP4466117B2 (ja) * | 2003-04-09 | 2010-05-26 | ヤマハ株式会社 | 画像合成装置 |
-
2005
- 2005-07-27 JP JP2005217042A patent/JP4899367B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007036668A (ja) | 2007-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4899367B2 (ja) | 俯瞰画像表示システム及び俯瞰画像の表示方法 | |
| JP4807104B2 (ja) | 車両周囲監視システム及び画像表示方法 | |
| US8305204B2 (en) | Vehicle surrounding confirmation apparatus | |
| JP3695319B2 (ja) | 車両周辺モニタ装置 | |
| JP4661917B2 (ja) | 駐車支援装置および駐車支援方法 | |
| JP4548322B2 (ja) | 駐車支援システム | |
| JP3298851B2 (ja) | 多機能車載カメラシステムと多機能車載カメラの画像表示方法 | |
| JP4725233B2 (ja) | 俯瞰画像表示システム | |
| JP5500369B2 (ja) | 車両周辺画像生成装置 | |
| JP5003946B2 (ja) | 駐車支援装置 | |
| JP5347257B2 (ja) | 車両用周辺監視装置および映像表示方法 | |
| JP4945177B2 (ja) | 車両の運転支援装置 | |
| WO2017159863A1 (ja) | 情報処理装置 | |
| JP2006050246A (ja) | 車両周辺視認装置 | |
| JP2006131213A (ja) | 自動二輪車の後方視認装置 | |
| JP3943363B2 (ja) | 駐車支援装置 | |
| JP5400316B2 (ja) | 駐車支援装置 | |
| JP2007126028A (ja) | 駐車支援システム | |
| JP2010006129A (ja) | 車両後方情報表示装置および車両後方情報表示方法 | |
| JP2007290433A (ja) | 駐車支援システム | |
| JP2007251880A (ja) | 車両用画像表示装置および画像合成方法 | |
| JP2007096496A (ja) | 車両周囲表示システム | |
| KR20150062277A (ko) | 주차 보조 장치 및 방법 | |
| JPH0983999A (ja) | 車載用監視カメラ装置 | |
| JP4023478B2 (ja) | 駐車支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110222 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111027 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20111104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4899367 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150113 Year of fee payment: 3 |