JP4892151B2 - エスカレータの駆動装置のための電源側と周波数変換器側との間での切り換えプロセス - Google Patents
エスカレータの駆動装置のための電源側と周波数変換器側との間での切り換えプロセス Download PDFInfo
- Publication number
- JP4892151B2 JP4892151B2 JP2001545180A JP2001545180A JP4892151B2 JP 4892151 B2 JP4892151 B2 JP 4892151B2 JP 2001545180 A JP2001545180 A JP 2001545180A JP 2001545180 A JP2001545180 A JP 2001545180A JP 4892151 B2 JP4892151 B2 JP 4892151B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- switching
- frequency converter
- line
- netz
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B25/00—Control of escalators or moving walkways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B25/00—Control of escalators or moving walkways
- B66B25/003—Methods or algorithms therefor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J3/00—Circuit arrangements for ac mains or ac distribution networks
- H02J3/007—Arrangements for selectively connecting the load or loads to one or several among a plurality of power lines or power sources
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/0077—Characterised by the use of a particular software algorithm
Description
【技術分野】
本発明は、負荷運転とアイドル運転との間で切り換え可能な、エスカレータや動く歩道として構成された搬送装置の駆動を制御するための方法および装置に関する。このような搬送装置は、ほぼ一定の周波数を供給するライン電圧接続部と、電気駆動モータ(特に誘導モータもしくは同期モータとして構成されたもの)と、運転状態の切り換えの要求を示す信号を発生する搬送要求信号発生装置と、を備えている。
【0002】
【背景技術】
エスカレータや動く歩道として構成された一般的な乗員搬送用搬送装置は、互いに隣接して端部のないベルトを構成する複数の踏板を備えており、これらの踏段は、駆動モータにより移動させられる。
【0003】
このような搬送装置の電力消費量および摩耗や裂傷を減少させるために、このような搬送装置を必要なときにだけ搬送移動させかつこれ以外のときには停止させる方法が開発されてきた。このような目的のために、搬送の要求を示す信号を発生する搬送要求信号装置が配置されており、これによって、搬送の要求が発生していることが検出される。例えば人が踏板を歩いたことにより搬送要求が発生している場合、搬送装置は、所定時間の間、搬送運転させられ、所定時間内に更なる搬送要求が発生しなかった場合には、再び停止状態に切り換えられる。
【0004】
搬送装置の始動および停止を頻繁に行う際のピーク負荷を回避するために、WO98/18711には、切り換え時に、駆動モータのオン・オフ状態を急峻に切り換えるのではなく、駆動モータの回転数(RPM)を線形的に増加もしくは減少させることが開示されている。このような搬送装置には、誘導モータが最も頻繁に利用される。誘導モータのRPMは交流電圧源の周波数に依存し、このことは、誘導モータが一定のライン周波数を有する交流電圧回路網に直接に接続されている場合は、誘導モータのRPMが一定であることを意味している。従って、制御可能な周波数変換器が用いられ、これに接続されるライン周波数が、このライン周波数とは異なる出力周波数に制御可能に変換されるようになっている。
【0005】
周波数変換器のコストは、周波数変換器から発生させるべき出力の増大とともに著しく増大するため、負荷運転状態でエスカレータもしくは動く歩道の駆動モータに接続することが可能な周波数変換器は高コストとなる。
【0006】
装置のコストおよび運転コストを低く維持するために、WO98/18711においては、搬送装置が、負荷運転状態でのみ全搬送速度で駆動され、搬送要求が発生していないスタンバイ運転時つまりアイドル運転時には減速されたアイドル運転速度で駆動されるようにすることが提案されている。さらに、駆動モータが、アイドル運転時および切り換えプロセス中にのみ周波数変換器に接続され、負荷運転時にはライン電圧源に直接に接続されるようにすることが提案されている。このことによって、その最大出力がはるかに低くなるように周波数変換器を設計することが可能となり、これによって、最大出力が搬送ベルトの負荷運転状態に適合された周波数変換器と比較して、コストが著しく抑えられる。WO98/18711に開示されている搬送装置は、搬送サービスを実行した後に搬送要求がさらに送られない場合には、アイドル運転に切り換えられ、アイドル運転に切り換えられた後の所定時間の間に搬送要求がさらに送られない場合にのみ、停止される。
【0007】
上述した方法によって、搬送装置のピーク負荷および急峻な速度変化は著しく緩和される。しかし、駆動モータをライン側と周波数変換器側との間で切り換える際に過度な過渡電流がなお生じる。このことは、駆動モータ自体の電圧が、周波数変換器を過負荷状態にしかつ搬送装置の移動を不規則にし得るものであることに起因する。本発明は、このような問題に対処するものである。
【0008】
【発明の開示】
このことは、請求項1の発明の方法および請求項11の発明の装置によって達成される。従属項には、このような方法および装置を更なる改善した発明が、記載されている。
【0009】
本発明の方法によると、負荷運転状態では、駆動モータにライン電圧が供給され、アイドル運転状態では、駆動モータに周波数変換器の出力電圧が供給される。本発明の目的を達成するために、ライン電圧と周波数変換器の出力電圧とが周波数および位相に関して互いに比較され、周波数変換器の出力周波数が、ライン周波数から所定の間隔だけずれた値に設定される。搬送装置を負荷運転状態からアイドル運転状態へもしくはこの逆に切り換えることを要求する信号が搬送要求信号発生装置から発生されると、このような運転状態の切り換えを要求する信号が発生した後でかつ周波数変換器の出力周波数がライン周波数に対して所定の間隔だけずれておりかつ周波数変換器の出力周波数とライン周波数との間に所定の位相間隔が存在する時点で、駆動モータを周波数変換器側とライン側との間で切り換える信号が発生される。
【0010】
ライン側と周波数変換器側との間での切り換えのために利用されるスイッチング装置(通常は、接触器)の動作には遅れが伴い、さらに、一方の接触器をオフに切り換えてから他方の接触器をオンに切り換えるまでの間に零電流時間を設けることによって周波数変換器を介したラインの短絡を防止する必要がある。切り換え信号が発生する時点と、先に導通状態にあった接触器がオフ状態に切り替わる時点と、他方の接触器がオン状態に切り替わる時点と、の間には、ある固有の動作遅れが存在し、これは、所定の搬送装置の所定の構成要素に依存する。
【0011】
従って、ライン電圧および周波数変換器の出力電圧を監視して周波数および位相を整合させ、このような整合が達成された時点で切り換え信号を発生させることによっては、周波数変換器側とライン側との間での切り換えをスムーズに行なうことができない。固有の動作遅れの後に実際に切り換えが行なわれるまでの間に、周波数および位相のずれが既に生じるため、ライン側と周波数側との間での切り換えをスムーズに行なうことができない。
【0012】
従って、本発明によれば、切り換えプロセスを「先立って」行なう。すなわち、本発明は、ライン周波数と周波数変換器の出力周波数との間で切り換える際に、動作遅れ、およびこのような動作遅れの間に生じる周波数変化および位相変化を見越すものである。このような目的のために、本発明は、特定の搬送装置に対して、固有の動作遅れと、動作遅れの間に生じる、モータ電圧の周波数の変化と、動作遅れの間に生じる、ライン周波数と周波数変換器の出力周波数との間の位相差の変化と、を求め、ライン電圧と周波数変換器の出力電圧との間に所定の周波数間隔および所定の位相間隔が存在した時点で、先立って切り換え制御信号を発生させる。このようにすることによって、スムーズに切り換えるために必要な、周波数および位相が整合した状態は、動作遅れの終りの時点で得られる。
【0013】
所定の周波数間隔の符号は、切り換え方向に依存する。搬送装置に固有の摩擦損失に起因して、駆動モータがラインにも周波数変換器にも接続されない零電流時間の間に、モータのRPMが減少する。ライン周波数は一定であり、切り換えプロセスの終りの時点でモータのRPMがこれと一致するようにしなければならないため、所定の周波数間隔は、周波数変換器側からライン側へと切り換えられる場合には、ライン周波数を上回るものであり、ライン側から周波数変換器側へと切り換えられる場合には、ライン周波数を下回るものである。
【0014】
本発明の方法は、負荷運転とアイドル運転との間で切り換え可能な搬送装置(特にエスカレータもしくは動く歩道)の駆動装置を制御するための電気式制御装置によって実行される。前記搬送装置は、ほぼ一定のライン周波数を有するライン電圧接続部と、駆動モータと、運転状態の切り換えの要求を示す信号を発生する搬送要求信号発生装置と、を備えている。前記制御装置は、出力周波数が設定可能な周波数変換器と、負荷運転回路(駆動モータがライン電圧接続部に接続される)およびアイドル運転回路(駆動モータが周波数変換器を介してライン電圧に接続される)を有する制御可能な切り換え装置と、周波数変換器の出力周波数を設定するシンクロナイザと、を備えている。ライン電圧接続部の出力電圧と周波数変換器の出力電圧とが、周波数および位相に関して互いに比較され、周波数変換器の出力周波数が、ライン周波数に対して所定の間隔だけずれた値に設定され、運転状態の切り換えの要求を示す信号が発生された後でかつ周波数変換器の出力電圧とライン電圧接続部の出力電圧との間に所定の周波数間隔および所定の位相間隔が存在した時点で、切り換え装置に信号が送られる。
【0015】
本発明の好適な実施例によると、切り換え装置のスイッチング装置は、接触器である。エスカレータや動く歩道に必要とされるようなスイッチング装置として設計された接触器は、通常、スイッチオフ信号を受信してから実際に非導通状態に切り替わるまでの間に固有のスイッチオフ遅れを有し、さらに、スイッチオン信号を受信してから実際に導通状態に切り替わるまでの間に固有の起動遅れを有する。このような場合、切り換え装置の固有の動作遅れは、導通状態にあった接触器を解放する際の遅れと、駆動モータに電力が供給されない零電流時間と、非導通状態にあった接触器を導通させる際の遅れと、からなる。
【0016】
切り換え信号が発生する時点で存在すべき、ライン電圧および周波数変換器の出力電圧の間の所定の周波数間隔および所定の位相間隔は、実際の搬送装置における各零電流時間および各スイッチオフ遅れに基づいて、経験的に決定される。このために、零電流時間の間に駆動モータの端子電圧の周波数および位相が変化する量およびスイッチオフ遅れの長さが求められる。これによって、切り換え装置が導通状態になった時点で、モータ端子電圧と切り換え装置に接続されたモータの電源との間で周波数および位相が少なくとも実質的に整合されるように、切り換え信号を発生すべき時点が求められる。
【0017】
各零電流時間中の駆動モータのRPMの減少量を考慮するために、搬送装置が負荷運転状態にあるかアイドル運転状態にあるかに依存して、周波数変換器の出力周波数が、ライン周波数よりも所定の周波数間隔だけ上回るか下回る値に設定される。いずれの場合にも、このような周波数間隔は、これが各切り換えプロセスの零電流時間中の駆動モータのRPMの減少量に対応したものとなるように、決定される。
【0018】
切り換えプロセスにおいて、本発明の一実施例によると、増加勾配および減少勾配によって、周波数変換器の出力周波数が制御される。好ましくは、このような勾配の極限において、周波数変換器の出力周波数が、ライン周波数に対して所定の周波数間隔だけずれた値に設定される。このために、2段階の調整が行なわれる。負荷状態における駆動モータのRPMに急速に到達させるとともに、停止状態から負荷運転へと切り換える際の調整プロセスの時間を短くするために、本発明の一実施例では、周波数変換器の出力周波数が、ライン周波数より低い所定の間隔における第1の部分の急勾配によって設定され、このような間隔を超えると、緩い勾配によって設定される。
【0019】
本発明の一実施例の制御装置は、負荷運転とアイドル運転との間で切り換えるための切り換え装置を備えており、この切り換え装置は、好ましくは、2つの接触器と、周波数変換器の出力周波数を設定するためのシンクロナイザと、を備えており、ライン電圧と周波数変換器の出力周波数とが周波数および位相に関して互いに比較され、周波数変換器が、ライン周波数に対して所定の間隔を有する値に設定され、運転状態の切り換えの要求を示す信号が発生した後でかつ周波数変換器の出力周波数とライン周波数との間に所定の間隔が存在しかつ周波数変換器の出力電圧とライン電圧との間に所定の位相間隔が存在する時点で、切り換え信号が発生される。
【0020】
【発明を実施するための最良の形態】
本発明の搬送システムの例として、部分切欠斜視図である図1に示されたエスカレータについて説明する。
【0021】
図1に示されているエスカレータ10は、下方乗場12、上方乗場14、支持フレーム構造16、連続的に連結されて連続したベルトを構成している複数の踏板18、踏板18を駆動するドラッグチェーン22、連続した踏板18の両側に延びた一対の手摺り24、ドラッグチェーン22に駆動的に連結された駆動モータ26、駆動モータ26と同時に動作する制御装置28、および搬送要求信号発生装置(乗員検出器32)を備えている。乗員検出器32としては、例えば、光電性リレー(photosensitive relay)を用いることが可能である。踏板18によって、2つの乗場12,14の間で乗員を搬送するためのプラットフォームが構成されている。2本の手摺り24は、それぞれ、踏板18と同じ速度で駆動される可動ハンドレール34を備えている。
【0022】
制御装置28によって、駆動モータ26に供給される電力が決定され、これによって、駆動モータ26のRPM、ひいては踏板18の移動速度が制御される。
【0023】
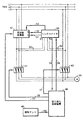
図2は、本発明の制御装置の構成を含む電気回路図である。この電気回路は、周波数変換器42、シンクロナイザ44、第1接触器K1、第2接触器K2、切り換え制御装置46、および搬送要求信号発生装置としての接触マット48を備えている。この回路構成全体は、三相回路として設計されており、三相ラインL1,L2,L3によって三相交流回路網に接続されている。
【0024】
周波数変換器42の入力側は、三相回路網のラインL1〜L3に接続されている。駆動モータ26は、接触器K1を介して周波数変換器42の出力側に接続されており、接触器K2を介してラインL1〜L3に接続されている。3本の制御ラインS1,S2,S3によって、シンクロナイザ44が周波数変換器42の制御入力に接続されている。さらに、ラインS4によって、シンクロナイザ44が切り換え制御装置46の制御入力に接続されている。制御ラインS5によって、切り換え装置46が周波数変換器42のもう一つの制御入力に接続されている。制御ラインS6によって、切り換え制御装置46が接触器K1の制御入力に接続され、制御入力S7によって、切り換え制御装置46が接触器K2の制御入力に接続されている。制御ラインS8によって、接触マット48が切り換え制御装置46の制御入力に接続されている。制御ラインS9によって、切り換え制御装置46がシンクロナイザ44の制御入力に接続されている。
【0025】
制御ラインS5,S6,S7によって、オン/オフ制御信号が周波数変換器42もしくは接触器K1,K2に送られる。制御ラインS3によって、ランプ制御信号がシンクロナイザ44から周波数変換器44に送られる。制御ラインS4によって、切り換えパルスがシンクロナイザ44から切り換え制御装置46に送られる。制御ラインS8によって、搬送要求信号が接触マット48から切り換え制御装置46に送られる。
【0026】
切り換え制御装置46は、好ましくは、マイクロプロセッサを備えており、これによって、周波数変換器42および2つの接触器K1,K2が、接触マット48から受信された搬送要求信号もしくはシンクロナイザ44から受信された切り換え信号に応じて切り換えられるようになっている。
【0027】
シンクロナイザ44は、制御ラインS9を介してシンクロナイザ44に送られた制御信号に応じて、制御ラインS1,S2を介して周波数変換器42の出力周波数を増加もしくは減少させる。シンクロナイザ44の測定入力E1,E2は、一対のライン50もしくは一対のライン52を介して、周波数変換器の2本の出力ラインもしくは回路網の2本の対応するラインに接続されている。これらの測定入力E1,E2は、回路網の位相および周波数と、周波数変換器の出力の対応する相の位相および周波数と、を測定するのに利用される。シンクロナイザ44は、測定入力E1,E2に接続された比較器を備えており、これによって、ライン電圧と周波数変換器の出力電圧が周波数および位相に関して互いに比較されるようになっている。
【0028】
本発明の一実施例において、シンクロナイザ44は、ダニッシュ(Danish)社製の特別仕様の同期継電器DEIF(部品識別番号GAS−113DG)である。
【0029】
切り換えパルスが発生される時点に関して、以下のパラメータを考慮する必要がある。
【0030】
a)切り換えパルスが発生した時点と接触器を非導通状態に切り換えるオフ信号が発生した時点との間の固有の遅れ
b)接触器がオフ信号を受信した時点とこれが非導通状態に切り替わる時点との間の、接触器に固有の遅れ
c)一方の接触器が非導通状態に切り替わる時点と他方の接触器が導通状態に切り替わる時点との間の零電流時間である固有の遅れ
d)接触器がオン切り換え信号を受信した時点とこれが導通状態に切り換わる時点との間の、接触器に固有の遅れ
e)駆動モータが回路網にも周波数変換器にも接続されない零電流時間の間の、搬送装置の固有の摩擦に起因した、駆動モータのRPMの減少
f)駆動モータの端子電圧(その位相および振幅は、モータの時定数および切り換えに要する時間に依存する)
駆動モータとして誘導モータが利用される場合は、
g)駆動モータの滑り
このようなパラメータは、全て、特定の搬送装置に対して経験的に求めることができる。このことによって、ライン周波数に対する所定の間隔(これに対して周波数変換器の出力周波数を調整する必要がある)および先に非導通状態にあった接触器を導通状態にする切り換えパルスを発生すべき時点を求めるとともに、ライン電圧とモータ端子電圧との間で周波数および位相を整合させることが可能となる。
【0031】
シンクロナイザ44は、ライン周波数から所定の間隔だけずれた値に、周波数変換器の出力周波数を設定するよう機能し、かつ測定されたラインの相と周波数変換器42の対応する相との間の位相差を求めることによって所定の位相間隔が得られる時点を確定する。以下の2つの条件が満たされた場合に、切り換えパルスがシンクロナイザ44から発生させられる。
【0032】
1.周波数変換器42の出力周波数とライン周波数との間の差が、所定の間隔に対して規定された許容範囲内にある。
【0033】
2.切り換えパルスが発生してからある決定可能な時間が経過した後に、回路網の監視された相と周波数変換器42の対応する相との間の位相角度が0になる。
【0034】
特定の搬送装置におけるある位相変化に対して必要な時間を求めることが可能であるため、所望の位相整合を達成するのに要する、切り換えパルスのリードタイムを求めることができる。
【0035】
ここで、図3および図4を参照しながら、図2の回路図の動作について詳細に説明する。図3には、停止状態から負荷運転への切り換えプロセスが示されており、図4には、負荷運転からアイドル運転つまりスタンバイ運転への切り換えが示されている。図3および図4には、周波数の変化、接触器K1,K2のスイッチング状態、および切り換えパルスSPの発生時が、時間の関数として示されている。図3および図4において、fNetzは、ライン周波数であり、Δfupは、fNetsを上回る所定周波数間隔であり、Δfdownは、fNetzを下回る所定の周波数間隔である。
【0036】
まず最初に、図3を参照しながら、搬送装置を停止状態から負荷運転へと切り換えるプロセスについて説明する。搬送装置が、接触マット48からの搬送要求信号によってオンに切り換えられた後、駆動モータ26は、導通している接触器K1を介して周波数変換器42に接続され、図3に示された、周波数変換器42の出力周波数の2段階の増加勾配に従って、固定子の回転する磁界により加速される。0HzからFNetz−1.5Hzまでは、急勾配の第1の部分に従って急激に加速され、続いて、FNetz−1.5HzからFNetzを通過してFNetz+Δfupに到達するまで、緩やかに加速される。
【0037】
シンクロナイザ44は、ライン周波数を連続的に測定し、これによって、可変周波数変換器42の出力周波数を設定するためにそれ自体を較正するため、ライン周波数の変化が補償される。。
【0038】
同期化のための条件が全て満たされると、周波数変換器42の出力周波数がfNetz+Δfupでありかつ固有のスイッチオフ遅れ時間Δtdおよび零電流時間Δtiの合計時間によって位相差が0となる状態が得られているため、時間t1で切り換えパルスが発生される。接触器K1に固有のスイッチオフ遅れ時間Δtdが経過した後、時間t2において、接触器K1が導通状態から非導通状態に切り替わり、駆動モータ26が零電流状態になる。誘導機に必然的に生じる滑りに起因して、モータ電圧の周波数が急激に減少する。続いて、駆動モータ26および搬送装置の摩擦損失に起因して、モータ電圧の周波数が減少する。このような滑りおよびモータ端子電圧の周波数の減少を考慮してΔfupが選択されているため、時間t3において、モータ端子電圧の周波数の減少は終了する。時間t3において、接触器K2が導通状態に切り換えられ、接触器K2を介して駆動モータ26にライン周波数fNetzが供給される。
【0039】
駆動モータ26が周波数変換器42から分離されると、駆動モータ26の固定子巻線内部の電流は0になるが、磁界はなお存在する。このような磁界によって、残留電圧が固定子巻線に発生し、このような残留電圧は、時間が経過するにつれて指数関数的に減少する。搬送装置に用いられる駆動モータの時定数は大きいため、電力が再び駆動モータ26に供給される時点では、このような残留電圧は高いままである。
【0040】
時間t3において、接触器K3が導通状態に切り替わり、これによって、駆動モータ26が回路網に接続されるため、この時点から、駆動モータ26を全負荷状態で運転することができる。
【0041】
周波数変換器42の出力周波数の周波数間隔Δfupによって、モータの滑りに起因した、モータ端子電圧の周波数の急激な減少、および摩擦損失に起因した、モータ端子電圧の周波数の減少が補償される。
【0042】
時間t1〜t3までの時間遅れに起因して、ライン電圧とモータ端子における残留電圧との間にはある位相シフトが生じる。接触器K2が導通状態に切り換えられた後に大きな過渡電流が発生することを防止するために、このような位相シフトが考慮される。このような理由により、ライン電圧とモータ端子電圧との間で位相が厳密に整合した時点ではなく、駆動モータがライン電力を受け始める時点よりも所定のリードタイムだけ前の時点で、切り換えパルスが発生される。
【0043】
図4に示された、負荷運転からアイドル運転への切り換えプロセスは、所定時間の間に新たな搬送要求信号が発生しない場合には、図3に示された切り換えプロセスと同様なものとなる。主な違いは、切り換えプロセス前に、周波数変換器42の出力周波数が、ライン周波数fNetzよりも所定の周波数間隔Δfdownだけ下回る値に調整される点である。周波数変換器42の出力周波数をこのような出力周波数に切り換えることは、例えば、最後に搬送要求信号が発生してからある時間が経過した後に行われる。
【0044】
周波数間隔Δfdownは、零電流時間Δtiの間にモータ端子電圧の周波数がライン周波数fNetzに対して減少する量に対応する。通常は、同一の接触器がK1,K2として利用されるため、固有のスイッチオフ遅れΔtdおよび零電流時間Δtiは、図3に示されたものと同じである。従って、切り換えパルスが発生する時間t4と接触器K2が非導通状態から導通状態に切り換えられる時間t6との間のリードタイムは、図3に示されたものと同じである。
【0045】
図4に示されているように、駆動モータ26が周波数変換器に切り換えられた後、周波数変換器42の出力周波数、ひいては駆動モータの固定子における回転磁界の周波数は、25Hzにまで減少する。このように到達したアイドル運転中の搬送装置の速度は、負荷運転状態での速度の半分である。
【0046】
このようなアイドル運転は、新たな搬送要求信号が発生するまでいかなる時間の間でも継続することができる。しかし、アイドル運転に到達してから所定時間以内に新たな搬送要求信号が発生しなければ、搬送装置を完全に停止させることができる。
【0047】
図5aおよび図5bには、本発明の搬送装置の全運転がフロー図によって示されている。このフロー図の最初においては、搬送装置は、負荷運転されておらず、停止状態(周波数変換器の出力周波数は0)もしくはアイドル運転つまりスタンバイ運転(周波数変換器の出力周波数は0より大きい)されている。搬送要求信号が発生した時点で搬送装置が停止状態にあるかアイドル運転状態にあるかに依存して、接触器K1が起動されて周波数変換器の出力周波数が0Hzから増加されるか、接触器K1が起動されたまま周波数変換器の出力周波数がその瞬時の周波数から増加され始める。シンクロナイザ44は、周波数変換器の瞬時的な周波数がfNetz−1.5Hzを下回るか上回るかを判断する。図3に示されているように、シンクロナイザ44は、前者の場合は、周波数の増加勾配を大きく設定し、後者の場合は、周波数の増加勾配を小さく設定する。シンクロナイザ44が周波数fNetz+Δfupに到達したと判断するまで、このように周波数が増加され続ける。周波数fNetz+Δfupに到達すると、シンクロナイザ44は、ライン電圧と周波数変換器の出力電圧との間に所定の位相差が存在するか否かを調べ、このような位相差が存在する場合は、切り換えパルスを発生させる。所定の位相差が得られた時点で切り換えパルスSPが発生することによって、オフ信号が接触器K1に送られ、オン信号が接触器2に送られる。時間τ1(固有のスイッチオフ遅れ時間Δtdと零電流時間Δtiとの合計)が経過した後、接触器K2が導通状態に切り替わり、ラインを介して駆動モータ26に電力が加わり、搬送装置が負荷運転状態になる。
【0048】
図5bのフロー図の最上部において、負荷運転に切り換えられてから所定時間Δt1の間に新たな搬送要求信号が受信されたか否かが判断される。このような場合、シンクロナイザ44は、周波数変換器42の周波数をfNetz−Δdownまで減少させる。周波数変換器の周波数がこのような値まで減少され、シンクロナイザ44が、ライン周波数と周波数変換器の電圧との間に所定の位相差が存在していると判断すると、シンクロナイザ44から切り換えパルスが発生される。これによって、K2にオフ信号が送られ、K1にオン信号が送られる。切り換えパルスが発生してから時間τ2が経過した後で、接触器K1が導通状態に切り替わり、これによって、周波数変換器42から駆動モータ26への電力の供給が開始される(時間t6)。シンクロナイザ44は、続いて、周波数変換器の周波数をスタンバイ周波数(図4において25Hz)にまで減少させる。時間Δt2の間に搬送要求信号がさらに受信された場合は、周波数変換器の周波数がアイドル運転周波数(25Hz)から再び増大させられる。時間Δt2以内に新たな搬送要求信号が受信されない場合は、搬送装置を停止状態に切り換える命令が発生しているか否かが判断される。このような命令が発生している場合は、オフ信号がK1,K2に送られ、これによって、両接触器K1,K2がオフ状態に切り替わる。すなわち、これらの接触器が非導通状態に切り替わり、駆動モータ26には電流が供給されなくなる。
【図面の簡単な説明】
【図1】 エスカレータの部分切欠斜視図。
【図2】 本発明の制御装置を示す、一部がブロック図である電気回路図。
【図3】 停止状態から負荷運転への切り換えプロセスを示すタイムチャート。
【図4】 負荷運転からアイドル運転への切り換えプロセスを示すタイムチャート。
【図5a】 本発明の制御プロセスを示すフロー図。
【図5b】 本発明の制御プロセスを示すフロー図。
Claims (22)
- 負荷運転とアイドル運転との間で切り換え可能な、エスカレータ(10)もしくは動く歩道として構成された搬送装置の駆動装置を制御する方法であって、前記搬送装置は、駆動モータ(26)と、出力が制御可能な周波数変換器(42)と、を備えており、負荷運転状態では、ほぼ一定のライン周波数(fnetz)を有するライン電圧が駆動モータ(26)に供給され、アイドル運転状態では、周波数変換器(42)の出力電圧が前記駆動モータ(26)に供給されるものにおいて、前記方法は、
ライン電圧と前記周波数変換器の出力電圧とを周波数および位相に関して互いに比較し、
前記周波数変換器(42)の出力周波数がライン周波数(fnetz)から所定の周波数間隔(Δfup,Δfdown)だけずれた値になるように、前記周波数変換器(42)を調整し、
運転状態の切り換えの要求を示す信号が搬送要求信号発生装置(48)から発生されると、このような運転状態の切り換えを要求する信号が発生した後でかつ前記周波数変換器(42)の出力周波数がライン周波数(fnetz)に対して所定の間隔(Δfup,Δfdown)だけずれておりかつ前記周波数変換器(42)の出力電圧とライン周波数(fnetz)との間に所定の位相間隔が存在する時点(t1,t4)で、駆動モータ(26)を周波数変換器側とライン側との間で切り換える切り換え信号(58)を発生させることを特徴とする方法。 - ライン側と周波数変換器側との間での切り換えが行われる前の所定の零電流時間(Δti)の間は、駆動モータ(26)が電流を受けずに運転されることを特徴とする請求項1記載の方法。
- 前記切り換え信号(SP)を、周波数変換器側とライン側との間での切り換えが起こるべき時間(t3,t6)よりもあるリードタイムだけ前の時点で発生させ、前記リードタイムは、前記零電流時間(Δti)に対応することを特徴とする請求項2記載の方法。
- 切り換え信号(SP)を受信した時点に対して固有のスイッチオフ遅れ(Δtd)を有する切り換え装置(K1,K2)によって切り換えを行い、周波数変換器側とライン側との間での切り換えが起こるべき時間(t3,t6)よりもあるリードタイムだけ前の時点で、周波数変換器側とライン側との間での切り換えの要求を発生し、前記リードタイムは、前記スイッチオフ遅れ(Δtd)と前記零電流時間(Δti)との合計時間であることを特徴とする、搬送装置を制御するための請求項2記載の方法。
- 前記周波数変換器(42)の出力周波数を、ライン周波数(fnetz)に対して周波数間隔(Δfup,Δfdown)だけずれた値に設定し、前記周波数間隔は、各零電流時間中の、前記駆動モータ(26)の回転数(RPM)の減少量に対応するものであることを特徴とする請求項2〜4のいずれかに記載の方法。
- 前記リードタイムの間のモータ端子電圧の位相変化量を前記の所定の位相間隔として用い、これによって、前記リードタイムの終わりの時点で、モータ端子電圧と周波数変換器の出力電圧との間で位相を実質的に整合させることを特徴とする請求項3〜5のいずれかに記載の方法。
- 負荷運転からアイドル運転への切り換え時に、前記周波数変換器(42)の出力周波数を、ライン周波数(fnetz)よりも所定の周波数間隔(Δfdown)だけ低い値からアイドル運転周波数(25Hz)まで、所定の減少勾配に従って設定することを特徴とする請求項1〜6のいずれかに記載の方法。
- 停止状態、負荷運転およびアイドル運転との間で切り換え可能な搬送装置に対して、前記搬送装置が停止している状態では、前記周波数変換器の出力周波数を0に設定し、搬送装置の停止状態から負荷運転への切り換え時には、前記周波数変換器(42)の出力周波数を、0からライン周波数(fnetz)よりも所定の周波数間隔(Δfup)だけ上回る値まで、所定の勾配に従って増加させることを特徴とするとする請求項1〜7のいずれかに記載の方法。
- 前記周波数変換器(42)の出力周波数を、ライン周波数(fnetz)に対して所定の周波数間隔(Δfup,Δfdown)だけずれた値に調整することを特徴とする請求項1〜8のいずれかに記載の方法。
- 前記搬送装置の停止状態から負荷運転への切り換え時に、前記周波数変換器(42)の出力周波数を、まず最初に、ある急な勾配に従って、ライン周波数(fnetz)よりも所定の周波数間隔だけ下回る値まで増加させ、続いて、緩やかな勾配に従って、ライン周波数(fnetz)よりも所定の周波数間隔(Δfup)だけ上回る値まで増加させることを特徴とする請求項9記載の方法。
- ほぼ一定のライン周波数(fnetz)を有するライン電圧接続部(Netz)と、駆動モータ(26)と、切り換え可能な搬送装置の負荷運転とアイドル運転との間での切り換えの要求を示す信号を発生させる搬送要求信号発生装置(48)と、のための駆動装置を制御するための電気式制御装置であって、前記搬送装置は、エスカレータもしくは動く歩道として構成されたものにおいて、前記制御装置は、出力周波数が制御可能な周波数変換器(42)と、前記駆動モータ(26)がライン電圧接続部(Netz)に直接に接続される負荷運転スイッチング状態および前記駆動モータ(26)が周波数変換器(42)を介してライン電圧接続部(Netz)に接続されるアイドル運転スイッチング状態を有する制御可能な切り換え装置(K1,K2)と、前記周波数変換器の出力周波数を制御するためのシンクロナイザ(44)と、を備えており、前記ライン電圧接続部(Netz)の出力電圧と前記周波数変換器(42)の出力電圧とが周波数および位相に関して比較可能であり、前記周波数変換器(42)の出力周波数がライン周波数(fnetz)から所定の周波数間隔(Δfup,Δfdown)だけずれた値になるように前記周波数変換器(42)を設定することが可能であり、切り換えの要求を示す信号が発生した後でかつ周波数変換器の出力電圧とライン電圧接続部の出力電圧との間に所定の周波数間隔および所定の位相間隔が得られた時点(t1,t4)で、切り換え信号(SP)が前記切り換え装置(K1,K2)に送られることを特徴とする装置。
- 前記切り換え装置(K1,K2)は、前記駆動モータを前記周波数変換器に接続する第1の制御可能なスイッチング装置(K1)と、前記駆動モータを前記ライン電圧接続部(Netz)に接続する第2のスイッチング装置(K2)と、を備えており、
これらの2つのスイッチング装置(K1,K2)のうちの一方のみが一度に導通し得るようになっており、導通状態にあったスイッチング装置(K1,K2)がオフ状態に切り替わってから所定の零電流時間(Δti)が経過した後にのみ、非導通状態にあったスイッチング装置(K1,K2)がオン状態に切り替わることを特徴とする請求項11記載の装置。 - 両スイッチング装置が、互いに対してブロックされており、これによって、先に導通状態にあったスイッチング装置(K1,K2)が非導通状態に切り替わってから零電流時間(Δti)が経過した後にのみ、非導通状態にあったスイッチング装置(K1,K2)が導通状態に切り替わることを特徴とする請求項12記載の装置。
- 非導通状態にあるスイッチング装置(K1,K2)を導通させるべき時点(t3,t6)よりもリードタイムだけ前の時点で、前記スイッチング装置(K1,K2)のスイッチング状態を切り換える切り換え信号(SP)を発生させるものとして、前記シンクロナイザ(44)が設計されており、前記リードタイムは、前記零電流時間(Δti)に対応するものであることを特徴とする請求項12〜13のいずれかに記載の制御装置。
- 両スイッチング装置は、スイッチオフ信号を受信した場合に、時間(t1,t4)に対して固有のスイッチオフ遅れ(Δtd)を有し、前記シンクロナイザ(44)は、非導通状態にあるスイッチング装置(K1,K2)を導通させるべき時点(t3,t6)よりもリードタイムだけ前の時点で、前記スイッチング装置(K1,K2)のスイッチング状態を切り換える切り換え信号(SP)を発生させるものとして設計されており、前記リードタイムは、前記スイッチオフ遅れ(Δtd)と前記零電流時間(Δti)との合計時間に対応するものであることを特徴とする請求項12〜13のいずれかに記載の制御装置。
- 前記シンクロナイザ(44)は、前記周波数変換器(42)の出力周波数を、前記ライン周波数(fnetz)からある周波数間隔(Δfup,Δfdown)だけずれた値に設定するものとして設計されており、前記周波数間隔は、各零電流時間(Δti)の間に前記駆動モータ(26)の回転数(RPM)が減少する量に対応することを特徴とする請求項12〜15のいずれかに記載の制御装置。
- 前記シンクロナイザ(44)は、前記の所定の位相間隔を、前記リードタイムの間の前記モータ端子電圧の位相変化に対応する値に設定するものとして設計されており、これによって、前記リードタイムの終わりの時点では、モータ端子電圧の位相と前記周波数変換器の出力電圧の位相とが実質的に整合されることを特徴とする請求項16記載の制御装置。
- 前記シンクロナイザ(44)は、前記搬送装置が負荷運転からアイドル運転へと切り換えられる場合に、前記周波数変換器(42)を、所定の減少勾配に従って、ライン周波数(fnetz)よりも所定の周波数間隔(Δfdown)だけ下回る値からアイドル運転周波数まで設定するものとして設計されていることを特徴とする請求項11〜17のいずれかに記載の制御装置。
- 停止状態、負荷運転およびアイドル運転との間で切り換え可能な搬送装置のための請求項11〜18のいずれかに記載の制御装置。
- 前記搬送装置の停止状態つまり0の周波数値まで前記周波数変換器(42)を調整するものとして設計されており、前記シンクロナイザ(44)は、前記搬送装置が停止状態から負荷運転へと切り換えられる場合に、周波数変換器(42)を、所定の勾配に従って、0の周波数からライン周波数(fnetz)よりも所定の周波数間隔(Δfup)だけ上回る値まで増加させるものとして設計されていることを特徴とする請求項19記載の制御装置。
- 前記シンクロナイザ(44)は、前記周波数変換器(42)の出力周波数をライン周波数(fnetz)から所定の周波数間隔(Δfup,Δfdown)だけずれた値に調整するものとして設計されていることを特徴とする請求項20記載の制御装置。
- 前記シンクロナイザ(44)は、前記搬送装置が停止状態から負荷運転に切り換えられる場合に、まず最初に、ライン周波数(fNetz)を所定の周波数間隔だけ下回る値(fNetz−1.5Hz)までは、前記周波数変換器(42)の出力周波数を、急な増加勾配で設定し、続いて、ライン周波数(fNetz)を所定の周波数間隔(fup)だけ上回る値までは、前記周波数変換器(42)の出力周波数を、緩やかな増加勾配で設定するものとして設計されていることを特徴とする請求項21記載の制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19960491.6 | 1999-12-15 | ||
| DE19960491A DE19960491C5 (de) | 1999-12-15 | 1999-12-15 | Vorrichtung und Verfahren zur Regelung des Antriebs einer Fördereinrichtung |
| PCT/US2000/033744 WO2001044083A1 (en) | 1999-12-15 | 2000-12-13 | Process for switching between mains supply and a frequency inverter and vice versa for an escalator drive |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004501038A JP2004501038A (ja) | 2004-01-15 |
| JP4892151B2 true JP4892151B2 (ja) | 2012-03-07 |
Family
ID=7932759
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001545180A Expired - Fee Related JP4892151B2 (ja) | 1999-12-15 | 2000-12-13 | エスカレータの駆動装置のための電源側と周波数変換器側との間での切り換えプロセス |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6626279B2 (ja) |
| EP (1) | EP1268323B1 (ja) |
| JP (1) | JP4892151B2 (ja) |
| KR (1) | KR100655827B1 (ja) |
| BR (1) | BRPI0016019B1 (ja) |
| DE (1) | DE19960491C5 (ja) |
| ES (1) | ES2556618T3 (ja) |
| WO (1) | WO2001044083A1 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4757390B2 (ja) * | 2001-01-22 | 2011-08-24 | 三菱電機株式会社 | マンコンべアの制御装置 |
| CN1281475C (zh) * | 2001-04-27 | 2006-10-25 | 通力股份公司 | 用以减小行人传送系统的换向区中的多边形效应的方法与装置 |
| DE10128840A1 (de) | 2001-06-15 | 2003-01-09 | Otis Elevator Co | Verfahren und Vorrichtung zur Steuerung des Antriebs einer Fördereinrichtung |
| DE10128839B4 (de) * | 2001-06-15 | 2006-11-23 | Otis Elevator Co., Farmington | Verfahren und Vorrichtung zur Steuerung des Antriebs einer Fördereinrichtung |
| US6848562B2 (en) * | 2003-05-27 | 2005-02-01 | Barry Jay Viola | Device for removal of controller assembly from escalator pit |
| JP2007521206A (ja) * | 2003-11-04 | 2007-08-02 | オーチス エレベータ カンパニー | 乗客用コンベヤの自動低速運転 |
| FR2916094B3 (fr) * | 2007-05-10 | 2009-07-03 | David Luo | Procede et dispositif de distribution et gestion d'electricite parametrable. |
| DE102009017076B4 (de) * | 2009-04-09 | 2012-06-28 | Kone Corp. | Einrichtung zum Personentransport |
| EP2651811B1 (en) | 2010-12-17 | 2020-05-20 | Otis Elevator Company | Regenerative power control for passenger conveyors |
| CN105656389B (zh) * | 2016-03-25 | 2019-03-12 | 无锡市优利康电气有限公司 | 一种工频与变频切换方法 |
| US20180118522A1 (en) * | 2016-10-28 | 2018-05-03 | Otis Elevator Company | Sensor on escalator landing plate |
| CN108609470B (zh) * | 2016-12-13 | 2021-09-03 | 通力股份公司 | 人移动输送机系统 |
| CN109510471B (zh) | 2017-09-15 | 2022-11-04 | 奥的斯电梯公司 | 变频器、旁路变频控制系统及其切换控制方法 |
| US11001448B2 (en) | 2018-12-14 | 2021-05-11 | Walmart Apollo, Llc | Conveyor liftgate systems and methods |
| EP3730445B1 (en) * | 2019-04-23 | 2022-03-23 | KONE Corporation | Method and passenger conveyor |
| USD918521S1 (en) * | 2019-05-21 | 2021-05-04 | Inventio Ag | Escalator balustrade transition section |
| CN110255345B (zh) * | 2019-06-28 | 2024-01-02 | 快意电梯股份有限公司 | 扶梯楼层板检测装置及检测方法 |
| CN112173569A (zh) * | 2020-11-05 | 2021-01-05 | 嘉峪关索通预焙阳极有限公司 | 一种石油焦上料斗提减速机变频控制系统 |
| US11539319B2 (en) | 2021-01-22 | 2022-12-27 | Regal Beloit America, Inc. | Controller and drive circuit for electric motors |
| US11387762B1 (en) | 2021-03-15 | 2022-07-12 | Regal Beloit America, Inc. | Controller and drive circuits for electric motors |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61291390A (ja) * | 1985-06-18 | 1986-12-22 | 三菱電機株式会社 | エスカレ−タの制御装置 |
| JPH04245958A (ja) * | 1991-01-31 | 1992-09-02 | Tsudakoma Corp | 織機の中速度起動方法 |
| JPH08225282A (ja) * | 1995-02-23 | 1996-09-03 | Toshiba Corp | エスカレータ制御装置及びマンコンベア制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4631467A (en) * | 1985-05-28 | 1986-12-23 | Otis Elevator Company | Escalator passenger flow control |
| JPH0729749B2 (ja) * | 1989-07-21 | 1995-04-05 | 株式会社日立製作所 | 乗客コンベアの制御装置 |
| JP2523927B2 (ja) * | 1990-04-11 | 1996-08-14 | 株式会社日立製作所 | 乗客コンベアの制御装置 |
| US5708416A (en) * | 1995-04-28 | 1998-01-13 | Otis Elevator Company | Wireless detection or control arrangement for escalator or moving walk |
| US5704464A (en) * | 1996-06-28 | 1998-01-06 | Otis Elevator Company | Passenger sensor for an escalator or moving walk |
| US6049189A (en) | 1996-10-29 | 2000-04-11 | Otis Elevator Company | Variable speed passenger conveyor and method of operation |
| US5785165A (en) * | 1996-10-30 | 1998-07-28 | Otis Elevator Company | Data collection and analysis system for passenger conveyors |
| US6155401A (en) * | 1998-02-13 | 2000-12-05 | Inventio Ag | Drive for an escalator |
-
1999
- 1999-12-15 DE DE19960491A patent/DE19960491C5/de not_active Expired - Fee Related
-
2000
- 2000-12-13 BR BRPI0016019-9A patent/BRPI0016019B1/pt not_active IP Right Cessation
- 2000-12-13 JP JP2001545180A patent/JP4892151B2/ja not_active Expired - Fee Related
- 2000-12-13 WO PCT/US2000/033744 patent/WO2001044083A1/en active Application Filing
- 2000-12-13 US US10/130,121 patent/US6626279B2/en not_active Expired - Lifetime
- 2000-12-13 KR KR1020027006745A patent/KR100655827B1/ko not_active IP Right Cessation
- 2000-12-13 ES ES00984291.5T patent/ES2556618T3/es not_active Expired - Lifetime
- 2000-12-13 EP EP00984291.5A patent/EP1268323B1/en not_active Expired - Lifetime
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61291390A (ja) * | 1985-06-18 | 1986-12-22 | 三菱電機株式会社 | エスカレ−タの制御装置 |
| JPH04245958A (ja) * | 1991-01-31 | 1992-09-02 | Tsudakoma Corp | 織機の中速度起動方法 |
| JPH08225282A (ja) * | 1995-02-23 | 1996-09-03 | Toshiba Corp | エスカレータ制御装置及びマンコンベア制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20020059795A (ko) | 2002-07-13 |
| US20020162726A1 (en) | 2002-11-07 |
| EP1268323A1 (en) | 2003-01-02 |
| DE19960491B4 (de) | 2006-02-16 |
| EP1268323B1 (en) | 2015-09-23 |
| EP1268323A4 (en) | 2009-06-17 |
| BRPI0016019B1 (pt) | 2015-06-23 |
| KR100655827B1 (ko) | 2006-12-11 |
| US6626279B2 (en) | 2003-09-30 |
| BR0016019A (pt) | 2004-07-20 |
| ES2556618T3 (es) | 2016-01-19 |
| DE19960491A1 (de) | 2001-07-05 |
| JP2004501038A (ja) | 2004-01-15 |
| DE19960491C5 (de) | 2010-06-10 |
| WO2001044083A8 (en) | 2001-10-04 |
| WO2001044083A1 (en) | 2001-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4892151B2 (ja) | エスカレータの駆動装置のための電源側と周波数変換器側との間での切り換えプロセス | |
| JP3993793B2 (ja) | 搬送装置の駆動装置を制御する方法および制御装置 | |
| JP4024864B2 (ja) | 乗客運搬装置の制御システム | |
| JP4605414B2 (ja) | 三相交流誘導モータを制御する方法 | |
| EP2661407B1 (en) | Method and conveyor system | |
| JPH055752B2 (ja) | ||
| JP4094348B2 (ja) | 搬送装置の駆動装置を制御する方法および制御装置 | |
| JP4757390B2 (ja) | マンコンべアの制御装置 | |
| JPH06144765A (ja) | マンコンベア制御装置 | |
| US5869795A (en) | Elevator floor arrival correction control | |
| JPH08512273A (ja) | 人員コンベヤ装置の電子制御方法 | |
| JPH08225282A (ja) | エスカレータ制御装置及びマンコンベア制御装置 | |
| JP3585393B2 (ja) | 乗客コンベアの改造方法 | |
| US20230406675A1 (en) | Control device for a passenger transport system | |
| JP4626124B2 (ja) | 電動機の制御装置 | |
| JP4400066B2 (ja) | エスカレータ等の制御装置 | |
| CN108609470A (zh) | 人移动输送机系统 | |
| CN106744225A (zh) | 输送机系统 | |
| JPH11228042A (ja) | エレベータの制御装置 | |
| JPH08326343A (ja) | 立体駐車装置 | |
| JPH0367953B2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110322 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110621 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110621 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111219 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |