JP4882467B2 - 電動パワーステアリング制御装置 - Google Patents
電動パワーステアリング制御装置 Download PDFInfo
- Publication number
- JP4882467B2 JP4882467B2 JP2006107893A JP2006107893A JP4882467B2 JP 4882467 B2 JP4882467 B2 JP 4882467B2 JP 2006107893 A JP2006107893 A JP 2006107893A JP 2006107893 A JP2006107893 A JP 2006107893A JP 4882467 B2 JP4882467 B2 JP 4882467B2
- Authority
- JP
- Japan
- Prior art keywords
- power
- potential difference
- relay
- relay circuit
- power supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
ここで、電源リレーの溶着診断を、例えば電源リレーの負荷接続側のリレー接点の電圧を用いて行う場合、電源リレーが溶着している場合には、負荷接続側のリレー接点の電圧は電源リレーを介して電源電圧と等しくなることから、負荷接続側のリレー接点の電圧の大きさを監視することでリレー溶着を検出することができる。
しかしながら、エンジンクランキング時には電源電圧が変動し、この電源電圧により作動するプリチャージ回路によるプリチャージ量が安定しないことから、この状態でリレー溶着診断を行った場合には、リレー溶着していると誤判断する可能性がある。
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、リレー溶着診断における誤判断を回避し、より的確に突入電流の発生を抑制することの可能な電動パワーステアリング制御装置を提供することを目的としている。
この請求項3に係る発明では、異常の種類によってリレー接点両端間の電位差が取り得る値が異なることからこの電位差に基づいて異常検出を行うことで、より的確に異常検出を行うことができる。また、この異常検出は、プリチャージ終了後に行われるから、電源安定化用コンデンサの充電電圧及び電源電圧が安定した状態で異常検出が行われることになり電圧変動に起因する誤判断が回避される。
この請求項4に係る発明では、電源リレー回路は、電源リレー回路の接点間の電位差がしきい値より小さくなったとき閉じられるから、電源リレー回路が閉じた直後には、リレー接点両端間に電位差が生じるはずである。電源リレー回路が閉じた直後のリレー接点両端間に電位差がないということはすなわち電源リレー回路が制御される以前に導通状態であったとみなすことができるから、リレー溶着異常の可能性があるとみなすことが可能となる。
この請求項5に係る発明では、電源リレー回路が閉じた後には、電源リレー回路は導通状態となるため、電源リレー回路の接点間の電位差はしきい値よりも小さくなるはずであるから、この電位差がしきい値以上である場合には断線異常が何れかの箇所で生じているとみなすことが可能となる。
また、請求項5に係る電動パワーステアリング制御装置によれば、電源リレー回路が閉状態に切り換わった後のリレー接点両端間の電位差がしきい値以上であるかどうかを判断することで、地絡等の断線異常を容易に検出することができる。
さらに、請求項6に係る電動パワーステアリング制御装置によれば、異常検出手段は、異常を検出したとき前記電源リレー回路を規定回数開閉動作させるから、リレー溶着の程度等によっては、異常の回復を図ることができる。
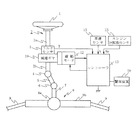
図1は、本発明の実施の形態を示す概略構成図であって、図中、1はステアリングホイールであり、このステアリングホイール1に運転者から作用される操舵力がステアリングシャフト2に伝達される。このステアリングシャフト2は、入力軸2aと出力軸2bとを有し、入力軸2aの一端がステアリングホイール1に連結され、他端はトルク検出手段としてのトルクセンサ3を介して出力軸2bの一端に連結されている。
このピニオンシャフト7に伝達された操舵力はステアリングギヤ8を介してタイロッド9に伝達され、図示しない転舵輪を転舵させる。ここで、ステアリングギヤ8は、ピニオンシャフト7に連結されたピニオン8aとこのピニオン8aに噛合するラック8bとを有するラックアンドピニオン形式に構成され、ピニオン8aに伝達された回転運動をラック8bで直進運動に変換している。
トルクセンサ3は、ステアリングホイール1に付与されて入力軸2aに伝達された操舵トルクを検出するもので、例えば、操舵トルクを入力軸2a及び出力軸2b間に介挿した図示しないトーションバーの捩れ角変位に変換し、この捩れ角変位を例えばポテンショメータで検出するように構成されている。このトルクセンサ3から出力されるトルク検出値Tは、コントローラ13に入力される。
そして、このリレー接点31と前記電界効果トランジスタFET1及びFET2の接続点との間に、電源安定化用コンデンサ35の一端が接続されその他端は接地される。
また、電源リレー回路33のリレー接点31のバッテリ側端子の電位及びリレー接点31のコンデンサ側の電位が電位差検出回路44に入力され、これらリレー接点31の両接点の電位差が検出され、これが図示しないA/D変換器を介して接点電位差としてマイクロコンピュータ16に入力される。
そして、車速センサ15及びトルクセンサ3の検出信号に基づいて公知の手順でモータ駆動制御処理を行い、運転者の操舵操作に応じた操舵補助力を発生する。
マイクロコンピュータ16では、まず、ステップS1で、イグニッションスイッチIGがオン状態となったかどうかを判断する。そして、イグニッションスイッチIGがオン状態となったならば、ステップS2に移行し、電源自己保持信号Skを出力し、電源自己保持用トランジスタ52をオン状態に制御する。これによって、イグニッションスイッチIGを介さずに、バッテリ36から直接電力供給が行われる。
このステップS6では、ステアリングホイール1を徐々に中立状態に戻す等、操舵補助制御終了時の所定の処理を行った後、ステップS7に移行し、電源リレー部30のトランジスタ34への電源リレー制御信号Srの出力を停止して、電源リレー回路33を開状態に制御する。次いで、ステップS8に移行して、電源自己保持信号Skの出力を停止して電源自己保持用トランジスタ52をオフ状態に切り換え、電源自己保持用トランジスタ52を介してのバッテリ36からの電力供給を遮断する。そして、ステップS1に戻り、イグニッションスイッチIGがオン状態となるのを監視する。
まず、ステップS11で、電源リレー回路33のリレー接点31の接点前段電圧、すなわち、バッテリ側接点電圧を読み込み、このバッテリ側接点電圧が予め設定したしきい値よりも高いかどうかを判断する。このしきい値は、バッテリ36のバッテリ電圧の大きさを判断するためのしきい値であって、例えばバッテリ36の初期のプリチャージ量に応じて設定される。
また、ステップS11で、バッテリ側接点電圧がしきい値よりも高いときには、ステップS12に移行し、プリチャージ制御信号Spを出力し、プリチャージを開始する。このとき、電源安定化用コンデンサ35のプリチャージ量が比較的増加度合の緩やかなパターンBの増加度合で増加し得るプリチャージ制御信号を出力する。
そして、電源リレー制御信号Srを出力した後、これに応じて電源リレー回路33が閉状態に切り換わるまでの所要時間が経過した時点で、ステップS23に移行し、電源リレー回路33の接点電位差を読み込み、接点電位差の有無を判断する。そして、接点電位差が無い場合には電源リレー回路33にリレー溶着が生じていると判断する。
このため、ステップS23で接点電位差がない場合には、電源リレー回路33の異常と判断し、ステップS25に移行する。
イグニッションスイッチがオン状態となると、マイクロコンピュータ16は、図3のステップS1からステップS2に移行し、電源自己保持信号Skを出力し、電源自己保持用トランジスタ52をオン状態に切り換える。そして、電源リレーオン制御処理を実行する(ステップS3)。
このときプリチャージ回路40には、イグニッションスイッチIG及び電源自己保持用トランジスタ52を介してバッテリ36から電力供給が行われるから、電源リレー回路33がオン状態となっていない状態であってもプリチャージが可能である。
そして、エンジン始動に伴う発電機36aの発電によりバッテリ側接点電圧が予め設定したしきい値よりも高くなったとき、ステップS11からステップS12に移行し、比較的緩やかな増加度合のパターンBでのプリチャージを開始する。
この状態から、イグニッションスイッチIGがオフに切り換わると、ステアリングホイール1を中立状態に戻す等の操舵制御処理終了時の処理が行われた後、電源リレー回路33がオフ状態に切り換えられ(ステップS7)、電源自己保持用トランジスタ52がオフ状態に切り換えられる(ステップS8)。
また、バッテリ側接点電圧が比較的高いかどうか、また、接点電位差が大きいかどうか、エンジン回転数が高いかどうかに応じて電源安定化用コンデンサ35のプリチャージ量の増加度合を制御し、バッテリ側接点電圧の変化状況及びコンデンサ側接点電圧の変化状況を考慮してプリチャージを行うことができるから、コンデンサ側接点電圧がバッテリ側接点電圧に近づき過ぎることを回避しつつ、速やかにプリチャージを行うことができ、プリチャージ時間の短縮を図ることができる。
ここで、上記実施の形態において、マイクロコンピュータ16で電源リレー制御信号Srを出力及び停止を行う処理がリレー制御手段に対応し、図4のステップS23及びステップS24の処理が異常検出手段に対応し、電位差検出回路44が電位差検出手段に対応している。
また、図4のステップS22、ステップS25及びステップS26の処理が開閉制御手段に対応している。
2 ステアリングシャフト
3 トルクセンサ
8 ステアリングギヤ
10 減速ギヤ
12 電動モータ
13 コントローラ
14 車速センサ
16 マイクロコンピュータ
18 モータ駆動回路
19 電流検出回路
20 Hブリッジ回路
21 FETゲート駆動回路
31 リレー接点
32 リレーコイル
33 電源リレー回路
35 電源安定化用コンデンサ
36 電源
42 プリチャージ制御用トランジスタ
43 突入電流抑制抵抗
44 電位差検出回路
50 警報装置
Claims (6)
- 操舵系に対して操舵補助力を付与する電動モータと、
当該電動モータを駆動するモータ駆動回路と、
当該モータ駆動回路に電源からの電力を供給する電源リレー回路と、
当該電源リレー回路を制御するリレー制御手段と、
当該電源リレー回路と前記モータ駆動回路との間に介挿された電源安定化用コンデンサと、
前記電源リレー回路を閉じる前に前記電源安定化用コンデンサを充電するプリチャージ回路と、
前記電源リレー回路のリレー接点両端間の電位差を検出する電位差検出手段と、
エンジンにより駆動されて発電し前記電源への充電を行う発電手段と、
前記エンジンが回転中か否かを検出するエンジン回転状態検出手段と、
当該エンジン回転状態検出手段での検出結果に基づきエンジンが回転中か否かに応じて前記電源安定化用コンデンサのプリチャージ量を制御するプリチャージ量制御手段と、を備え、
前記リレー制御手段は、前記電位差検出手段で検出した電位差が予め設定したしきい値より小さくなったとき前記電源リレー回路を閉状態に制御し、
前記プリチャージ量制御手段は、エンジンが非回転中は、回転中よりもより遅い速度でプリチャージを行うことを特徴とする電動パワーステアリング制御装置。 - 前記電源リレー回路の、前記電源側と接続される接点の電圧を検出する電源側接点電圧検出手段を備え、
前記プリチャージ量制御手段は、前記電源側接点電圧検出手段で検出される電源側接点電圧が予め設定したしきい値以下であり、且つ前記電位差検出手段で検出される電位差が予め設定したしきい値より小さいときには前記電源安定化用コンデンサを放電させることを特徴とする請求項1記載の電動パワーステアリング制御装置。 - 前記電位差検出手段で検出される、前記リレー接点両端間の電位差に基づいて異常検出を行う異常検出手段を備え、
当該異常検出手段は、前記電源リレー回路が閉状態に制御された後に、前記異常検出を行うことを特徴とする請求項1又は請求項2記載の電動パワーステアリング制御装置。 - 前記異常検出手段は、前記電位差検出手段の検出結果に基づき、前記電源リレー回路が閉状態に切り換わったと予測される時点での前記リレー接点両端間に電位差がないとき、リレー溶着異常と判断することを特徴とする請求項3記載の電動パワーステアリング制御装置。
- 前記異常検出手段は、前記電位差検出手段の検出結果に基づき、前記電源リレー回路が閉状態に切り換わった後の前記リレー接点両端間の電位差が予め設定したしきい値以上であるとき、断線異常であると判断することを特徴とする請求項3記載の電動パワーステアリング制御装置。
- 前記リレー制御手段は、前記異常検出手段で異常を検出したとき、前記電源リレー回路を開閉動作させる開閉制御手段を備え、
前記異常検出手段は、前記異常を検出したとき、前記開閉制御手段を作動させ、
前記電源リレー回路を規定回数開閉動作させても前記異常が検出されるとき、異常発生として確定することを特徴とする請求項3から請求項5の何れか1項に記載の電動パワーステアリング制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006107893A JP4882467B2 (ja) | 2006-04-10 | 2006-04-10 | 電動パワーステアリング制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006107893A JP4882467B2 (ja) | 2006-04-10 | 2006-04-10 | 電動パワーステアリング制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007276706A JP2007276706A (ja) | 2007-10-25 |
| JP4882467B2 true JP4882467B2 (ja) | 2012-02-22 |
Family
ID=38678614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006107893A Expired - Fee Related JP4882467B2 (ja) | 2006-04-10 | 2006-04-10 | 電動パワーステアリング制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4882467B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140065572A (ko) * | 2012-11-16 | 2014-05-30 | 현대모비스 주식회사 | 전동식 조향장치를 제어하기 위한 전자 컨트롤 유닛 및 그 운영 방법 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010074915A (ja) | 2008-09-17 | 2010-04-02 | Jtekt Corp | モータ制御装置及び電動パワーステアリング装置 |
| JP4720896B2 (ja) | 2008-10-08 | 2011-07-13 | 株式会社デンソー | 電源回路の異常診断装置、及び電源回路 |
| JP5402068B2 (ja) * | 2009-02-19 | 2014-01-29 | 日本精工株式会社 | モータ制御装置 |
| JP5444992B2 (ja) * | 2009-09-24 | 2014-03-19 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2011213255A (ja) * | 2010-03-31 | 2011-10-27 | Nsk Ltd | 電動パワーステアリング装置 |
| JP5311233B2 (ja) | 2010-12-27 | 2013-10-09 | 株式会社デンソー | モータ制御装置、および、これを用いた電動パワーステアリング装置 |
| JP2013091424A (ja) * | 2011-10-26 | 2013-05-16 | Omron Automotive Electronics Co Ltd | 電子制御装置 |
| JP5888101B2 (ja) * | 2012-05-09 | 2016-03-16 | 株式会社デンソー | 制御装置 |
| JP6244110B2 (ja) * | 2013-05-31 | 2017-12-06 | 日本電産エレシス株式会社 | 電子制御装置 |
| JP5683667B1 (ja) * | 2013-10-11 | 2015-03-11 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| KR102393011B1 (ko) * | 2018-08-27 | 2022-05-02 | 현대모비스 주식회사 | 엠디피에스용 기계식 릴레이의 고장 검출 및 대응방법 |
| JP7172306B2 (ja) | 2018-09-03 | 2022-11-16 | 株式会社ジェイテクト | 車両制御装置 |
| JP2020137196A (ja) * | 2019-02-15 | 2020-08-31 | 株式会社ミツバ | モータ制御装置及びモータ制御方法 |
| KR102897087B1 (ko) * | 2023-01-31 | 2025-12-08 | 에이치엘만도 주식회사 | 조향 제어 장치 및 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6062374A (ja) * | 1983-09-14 | 1985-04-10 | 松下電工株式会社 | 床下収納庫 |
| JP3839142B2 (ja) * | 1997-09-19 | 2006-11-01 | 本田技研工業株式会社 | 電動機駆動装置 |
| JP3595155B2 (ja) * | 1998-03-04 | 2004-12-02 | 本田技研工業株式会社 | 電動機駆動装置および電動パワーステアリング装置 |
| JP3560876B2 (ja) * | 1999-10-26 | 2004-09-02 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3511593B2 (ja) * | 2000-11-10 | 2004-03-29 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
-
2006
- 2006-04-10 JP JP2006107893A patent/JP4882467B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140065572A (ko) * | 2012-11-16 | 2014-05-30 | 현대모비스 주식회사 | 전동식 조향장치를 제어하기 위한 전자 컨트롤 유닛 및 그 운영 방법 |
| KR102004685B1 (ko) * | 2012-11-16 | 2019-07-30 | 현대모비스 주식회사 | 전동식 조향장치를 제어하기 위한 전자 컨트롤 유닛 및 그 운영 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007276706A (ja) | 2007-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2301822B1 (en) | Electric power steering system | |
| JP4882467B2 (ja) | 電動パワーステアリング制御装置 | |
| KR0178294B1 (ko) | 전동파워스티어링 제어장치 | |
| JP3511593B2 (ja) | 電動パワーステアリング制御装置 | |
| JP5092538B2 (ja) | モータ制御装置及びこれを用いた電動パワーステアリング制御装置 | |
| JP2019140883A (ja) | 電源装置 | |
| US20160087572A1 (en) | Motor Drive Device and Motor Drive Method for EPS System | |
| WO2010038702A1 (ja) | 電動パワーステアリング装置 | |
| JPWO1999017977A1 (ja) | 自動車用制御装置 | |
| JP5088473B2 (ja) | ステアリング装置 | |
| JP5402068B2 (ja) | モータ制御装置 | |
| JPWO2005081386A1 (ja) | リレー溶着防止装置およびモータ駆動装置 | |
| JP3595155B2 (ja) | 電動機駆動装置および電動パワーステアリング装置 | |
| JP5194630B2 (ja) | 電源制御装置 | |
| JP5407935B2 (ja) | 電動パワーステアリング装置 | |
| JP4876716B2 (ja) | 電動パワーステアリング制御装置 | |
| JP5683667B1 (ja) | 電動式パワーステアリング装置 | |
| JP4910561B2 (ja) | 電動パワーステアリング装置 | |
| JP4899668B2 (ja) | 電動パワーステアリング制御装置 | |
| JP2005088861A (ja) | パワーステアリング装置 | |
| JP2013091424A (ja) | 電子制御装置 | |
| JP2006051912A (ja) | 電動パワーステアリング装置 | |
| JP2006062616A (ja) | 車両の操舵アシスト装置 | |
| JP2011213255A (ja) | 電動パワーステアリング装置 | |
| JP4472584B2 (ja) | パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090212 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20101022 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110719 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110721 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110912 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111121 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4882467 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |