JP4817883B2 - 回転多面鏡制御装置 - Google Patents
回転多面鏡制御装置 Download PDFInfo
- Publication number
- JP4817883B2 JP4817883B2 JP2006051169A JP2006051169A JP4817883B2 JP 4817883 B2 JP4817883 B2 JP 4817883B2 JP 2006051169 A JP2006051169 A JP 2006051169A JP 2006051169 A JP2006051169 A JP 2006051169A JP 4817883 B2 JP4817883 B2 JP 4817883B2
- Authority
- JP
- Japan
- Prior art keywords
- polygon mirror
- signal
- speed
- rotary polygon
- counting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Laser Beam Printer (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Facsimile Scanning Arrangements (AREA)
- Control Of Electric Motors In General (AREA)
Description
前記レーザを検出しビーム検出信号を出力するビーム検出手段と、
前記ビーム検出信号の周波数を(1/m)に分周して前記回転多面鏡の速度制御クロック信号とする速度制御クロック生成手段と、
前記ビーム検出信号の周波数を(1/n)に分周して前記回転多面鏡の速度可変クロックとする可変速度クロック発生手段と、
前記回転多面鏡があらかじめ定めた回転数で回転する際の該ビーム検出信号の周期をm倍にした値を前記回転多面鏡の目標速度値として格納する目標速度設定手段と、
前記目標速度値を初期値とし前記速度可変クロックによりカウントアップあるいはカウントダウンすることにより回転多面鏡の目標速度を可変する目標速度可変手段と、
前記目標速度可変手段のカウントアップあるいはカウントダウン値を設定する可変範囲設定手段と、
基準クロック信号を生成する基準クロック信号発生手段と、
前記基準クロック信号を以って前記速度制御クロック信号の奇数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第1カウント手段と、
前記基準クロック信号を以って前記速度制御クロック信号の偶数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第2カウント手段とを有し、
前記第1カウント手段と前記第2カウント手段の両方がカウント停止している期間は回転多面鏡の駆動手段に加速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の両方がカウント動作をしている期間は回転多面鏡の駆動手段に減速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の一方がカウント動作をしている期間は回転多面鏡の駆動手段に加速命令信号及び減速命令信号の何れも出力しないことにより回転多面鏡の回転数を可変速制御する。
前記回転多面鏡の回転周期を検出し回転検出信号を出力する回転検出手段と、
前記回転検出信号の周波数を(1/p)に分周して前記回転多面鏡の速度制御クロック信号とする速度制御クロック生成手段と、
前記回転検出信号の周波数を(1/q)に分周して前記回転多面鏡の速度可変クロックとする可変速度クロック発生手段と、
前記回転多面鏡が所定回転数で回転する際の前記ビーム検出信号の周期をp倍にした値を前記回転多面鏡の目標速度値として格納する目標速度設定手段と、
前記目標速度値を初期値とし前記速度可変クロックによりカウントアップあるいはカウントダウンすることにより回転多面鏡の目標速度を可変する目標速度可変手段と、
前記目標速度可変手段のカウントアップあるいはカウントダウン値を設定する可変範囲設定手段と、
基準クロック信号を生成する基準クロック信号発生手段と、
前記基準クロック信号を以って前記速度制御クロック信号の奇数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第1カウント手段と、
前記基準クロック信号を以って前記速度制御クロック信号の偶数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第2カウント手段とを有し、
前記第1カウント手段と前記第2カウント手段の両方がカウント停止している期間は回転多面鏡の駆動手段に加速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の両方がカウント動作をしている期間は回転多面鏡の駆動手段に減速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の一方がカウント動作をしている期間は回転多面鏡の駆動手段に加速命令信号及び減速命令信号の何れも出力しないことにより回転多面鏡の回転数を可変速制御する。
<電子写真式画像形成装置>
図11は本実施形態に係るプリントシステムのブロック図である。プリントシステムは、ネットワークやシリアルインターフェース等を介して接続されたホストコンピュータ2104とレーザビームプリンタ2001とで構成される。プリンタコントローラ2103は、プリンタ2001全体を制御するコントローラである。プリンタコントローラ2103は、たとえばホストコンピュータ2104から受信した印刷データを2値ビットマップデータに展開し、必要な画像処理を施すなどの処理を行う。また、プリンタコントローラ2103は、エンジンコントローラ2002から出力されるタイミング信号(水平同期信号及び垂直同期信号及びドットクロック信号)従って画像データをエンジンコントローラに供給する。エンジンコントローラ2002は、エンジン部2003から送られる信号(ビーム検出信号や用紙検出信号)に基づいてタイミング信号を生成し、画像データをプリンタコントローラ2103から受信する。エンジンコントローラ2002はまた、受信した画像データをパルス幅変調したビデオ信号としてエンジン部2003に供給する。
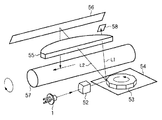
図4は本実施形態を含む光学走査ユニットの構成図である。光学走査ユニットはエンジン部2003の一部である。光学走査ユニットは、半導体レーザ51やポリゴンミラー54、回転多面鏡駆動回路53、感光ドラム57等を含み、感光ドラム57上に画像データに応じた静電潜像を形成するユニットである。半導体レーザ51から出射したレーザビームはシリンドリカルレンズ52を通って回転多面鏡53に到達する。回転多面鏡53は、スキャナモータを含む回転多面鏡駆動回路54によって等角速度で回転している。レーザビームは、回転多面鏡54の回転速度に同期して、画像信号によってパルス幅変調されている。回転多面鏡53に到達したレーザビームは回転多面鏡53によって偏向され、f−θレンズ55によって平面に投影された光の線速度が等速度となるように変換される。このためレーザビームは、感光ドラム57の表面を長手方向に等速で走査する。また、f−θレンズ55を通ったレーザビームは、感光ドラム57の画像が形成される領域(画像領域という)を照射しない位置に設けられたビーム検出(以下BDと略す)センサ58により受光される。画像領域では、レーザビームはf−θレンズ55を通って反射ミラー56により反射され、感光ドラム57上を照射する。感光ドラム57は予備的に帯電されており、レーザビームの照射によって静電潜像が形成される。感光ドラム57に形成された静電潜像はトナーにより現像されてトナー像となり、トナー像が用紙に転写され定着されて用紙上に画像が形成される。
図6は、回転多面鏡を回転させるスキャナモータを制御するためのモータ駆動装置の概略図である。図6において、回転多面鏡制御部2002aには、目標速度値608、基準信号であるSCNCLK信号26が入力される。このほか、速度制御開始信号や速度可変命令信号等も入力される。回転多面鏡制御部2002aは、加速命令信号44および減速命令信号45を出力する。加速命令信号44および減速命令信号45は回転多面鏡駆動回路602に入力される。回転多面鏡駆動回路602からは3相ブラシレスモータ601を駆動するための駆動電流603,604,605が出力される。3相ブラシレスモータ601には位置検出素子606が設けられている。位置検出素子606からは3本の位置検出信号607が回転多面鏡駆動回路602に入力される。回転多面鏡駆動回路602は、モータ601の回転等には、検出されたモータ601の回転位相に応じたタイミングで駆動電流を出力してモータ601に電流を供給して回転させる。以下、各ブロックについて説明する。ただし、回転多面鏡制御部2002aに関しては、最後に詳しく説明する。
図7は回転多面鏡駆動回路602のブロック図である。図8は回転多面鏡駆動回路のタイミングチャートである。図7において、701はチャージポンプ、702はチャージポンプコンデンサである。チャージポンプ701にアクティブ(この場合‘L’レベル)の加速命令信号44が入力されると、定電流がチャージポンプ701からチャージポンプコンデンサ702に流れて電荷が蓄積される(たとえば図8のタイミング801)。また、チャージポンプ701にアクティブ(この場合‘L’レベル)の減速命令信号45が入力されると、定電流がチャージポンプコンデンサ702からチャージポンプ701に流れ出して電荷を放電する(たとえば図8のタイミング802)。703は位相補償回路で、チャージポンプ出力708に対して、モータ特性に応じたゲイン及び位相調整を行う。マトリクス回路705は、予め設定した基準電圧710と比較し、位相補正出力709が基準電圧710より大きい時は駆動開始信号を出力する(たとえば図8のタイミング803)。位相補正出力709が基準電圧710より小さい時は駆動停止信号を出力する(たとえば図8のタイミング804)。両者が等しければ中立状態である(たとえば図8のタイミング805)。モータ素子駆動素子706は、マトリクス回路705からの駆動制御信号711に応じた駆動電流をモータ601に入力する。なお、駆動開始信号とは、駆動制御信号711によりモータを加速する信号状態にあるとき、その駆動制御信号711を指す。駆動停止信号とは、駆動制御信号711によりモータを減速する信号状態にあるとき、その駆動制御信号711を指す。
図1は第1の実施形態を示す回転多面鏡制御部2002aのブロック図である。回転多面鏡制御部2002aは、加速命令信号44および減速命令信号45を生成する。図2A−図2Cは、回転多面鏡制御部2002bの主要ブロックのタイミングチャートである。図2Bは例として回転数を減じる制御を行った場合の、図2Cは回転数を増す制御を行った場合の図である。
BD信号3は、ビームBDゲートブロック4に入力される。BD信号3から、LPFで構成される波形整形回路5でノイズ成分が除去された後、BDゲート発生回路7に入力される。BDゲート発生回路7は、速度可変カウント用BDゲート信号8及び速度制御用BDゲート信号9を生成する。速度可変カウント用BDゲート信号8の周波数はビーム出力信号6の周波数の1/nに、速度制御用BDゲート信号9の周波数はビーム出力信号6の周波数の1/mとなるように設定される。また、いずれのゲート信号も、アクティブ(負論理)の期間にビーム出力信号6がアクティブとなるように同期がとられている。図2A−図2Cに示すタイミング図では、例としてm=4、n=2に設定している。
目標速度設定レジスタ19には、kビットの目標速度初期値20を格納する。目標速度初期値20は回転多面鏡が所定回転数時に出力されるBD信号3の基本周期のm倍(m≧1)とし、スキャナクロックSCNCLK(以下SCNCLKと略す)26の周期の倍数で表される。これは後述する速度制御ブロック27の動作クロックとしてSCNCLK26を用いているためである。分周比mおよびSCNCLKの周期は一定に決められるから、目標速度初期値20は、目標となるBD信号3の周期に応じて決定される。目標速度初期値は、最終的には目標速度に応じた値まで増加されるカウント値24の初期値である。望ましくは、現在の回転多面鏡の回転数に応じた値が設定される。また図1ではレジスタに値を設定するための機構は設けられていないが、不図示の制御回路から値を設定することができる。これは目標速度初期値は現在のスキャナモータの回転数に応じた値が設定されるのが望ましく、スキャナモータの回転数は変更され得るためである。
分周器28は、速度制御BD信号13を2分周した分周器出力信号29を生成し、それをカウント開始信号a発生回路30およびカウント開始信号b発生回路34に入力する(図2B参照)。カウント開始信号a発生回路30は、例えば分周器出力信号29の立上りエッジに同期したカウント開始信号a31を生成する。一方、カウント開始信号b発生回路34は、たとえば分周器出力信号29の立下りエッジに同期したカウント開始信号b35を生成する。
図3は第1の実施形態における回転多面鏡制御部の動作概要図である。この例では、回転多面鏡53の現在の回転数Pは32000[rpm]、面数Nは12である。また、BD信号3の周期τbdは、τbd=1/(R×N/60)=1/(32000×12/60)=156.25[μs]となる。目標速度初期値20は、τbd×mをSCNCLKの1周期を単位として表した値であり、(τbd×m)/(SCNCLK26の周期)と表せる。速度制御BD信号13の分周設定値mは4であるから、SCNCLK26の周波数を16MHzとすると、目標速度初期値20は、156.25μs×4×16MHz=10000となる。
さてここで、図1の速度可変ブロック16の変形例を説明する。図1の速度可変カウンタ23はアップカウントするカウントとしているが、本例ではアップカウントとダウンカウントの切り替え信号を持つ。そして、目標速度初期値レジスタ19とともに、最終目標速度値レジスタを持つ。たとえば図3の例では、目標速度初期値レジスタ19に10000が、最終目標速度値レジスタに10100がセットされる。そして、目標速度初期値レジスタ19の値と、最終目標速度値レジスタの値とを比較する比較器をさらに備える。その比較の結果、目標速度初期値レジスタ19の値の方が大きければ(すなわち加速ならば)、カウンタ23の切り替え信号は「ダウンカウント」となる。逆であれば(すなわち減速ならば)、「アップカウント」となる。さらに、可変範囲設定回路21は、速度可変命令信号15がいったんアクティブにされると、不図示の可変範囲終了信号がアクティブになるまで可変範囲設定信号22をアクティブにするように構成される。速度可変カウンタ24の出力は、第1実施形態同様速度制御ブロック27に入力されると共に、比較器に入力される。比較器のもうひとつの入力には、最終目標速度値レジスタが接続されている。すなわちこの比較器は速度可変カウンタ24の値と最終目標速度値レジスタの値とを比較する。両者が等しければ、出力信号である可変範囲終了信号をアクティブにする。この結果、可変範囲設定信号22がインアクティブになって速度可変カウンタ23によるカウントは停止する。他の構成は前述した第1実施形態と同様である。
図5は、第3の実施形態における回転検出回路のブロック図である。60はスキャナモータ、61はホール素子で磁束密度の磁界を受感させることにより電位差が発生する。r1およびr2はホール素子61にバイアスを加えるバイアス抵抗である。スキャナモータ60の回転によりホール素子61から電圧が出力される。62のホール信号増幅部で、OPアンプ63により差動増幅回路を構成している。バイアス回路64は回転検出信号65の直流レベルを調整するが接地しても良い。ホール信号増幅部62にて所定の増幅率に増幅された回転検出信号65は第1の実施形態におけるBD信号3に変わる信号として回転多面鏡53の速度制御信号として用いる。動作については同様のため以下は省略する。
2 ビーム検出(BD)回路
4 ビーム検出(BD)信号ゲートブロック
7 ビーム検出(BD)ゲート信号発生回路
10 速度可変カウント用ビーム検出(BD)信号発生回路
12 速度制御用ビーム検出(BD)信号発生回路
16 速度可変ブロック
17 目標速度入力制御回路
19 目標速度設定レジスタ
21 可変範囲設定回路
23 速度可変カウンタ
25 スキャナクロック(SCCLK)発生回路
27 速度制御ブロック
28 分周器(1/2)
30 カウント開始信号a発生回路
32 カウンタa
33 可変速度値aラッチ
36 カウント開始信号b発生回路
38 カウンタb
39 可変速度値bラッチ
44 加速命令信号
45 減速命令信号
Claims (4)
- 画像信号に基づいて変調されたレーザの回転多面鏡による反射光で像担持体を走査することにより前記像担持体上に潜像を形成する画像形成装置において、前記回転多面鏡の回転周期を検出し、あらかじめ定めた回転数における回転周期を基準周期とし、該回転周期と基準周期を比較することにより加速命令信号あるいは減速命令信号を出力することにより回転多面鏡の回転数を制御する回転多面鏡制御装置であって、
前記レーザを検出しビーム検出信号を出力するビーム検出手段と、
前記ビーム検出信号の周波数を(1/m)に分周して前記回転多面鏡の速度制御クロック信号とする速度制御クロック生成手段と、
前記ビーム検出信号の周波数を(1/n)に分周して前記回転多面鏡の速度可変クロックとする可変速度クロック発生手段と、
前記回転多面鏡があらかじめ定めた回転数で回転する際の該ビーム検出信号の周期をm倍にした値を前記回転多面鏡の目標速度値として格納する目標速度設定手段と、
前記目標速度値を初期値とし前記速度可変クロックによりカウントアップあるいはカウントダウンすることにより回転多面鏡の目標速度を可変する目標速度可変手段と、
前記目標速度可変手段のカウントアップあるいはカウントダウン値を設定する可変範囲設定手段と、
基準クロック信号を生成する基準クロック信号発生手段と、
前記基準クロック信号を以って前記速度制御クロック信号の奇数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第1カウント手段と、
前記基準クロック信号を以って前記速度制御クロック信号の偶数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第2カウント手段とを有し、
前記第1カウント手段と前記第2カウント手段の両方がカウント停止している期間は回転多面鏡の駆動手段に加速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の両方がカウント動作をしている期間は回転多面鏡の駆動手段に減速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の一方がカウント動作をしている期間は回転多面鏡の駆動手段に加速命令信号及び減速命令信号の何れも出力しないことにより回転多面鏡の回転数を可変速制御することを特徴とする回転多面鏡制御装置。 - 前記速度制御クロック信号の前記ビーム検出信号に対する分周比mを前記回転多面鏡の面数と同一値、整数倍値あるいは前記回転多面鏡の面数内の因数値とし、
前記速度可変クロックの前記ビーム検出信号に対する分周比nを前記速度制御クロック信号の前記ビーム検出信号に対する分周比m以上とすることを特徴とする請求項1に記載の回転多面鏡制御装置。 - 画像信号に基づいて変調されたレーザの回転多面鏡による反射光で像担持体を走査することにより前記像担持体上に潜像を形成する画像形成装置において、回転多面鏡の回転周期を検出し、あらかじめ定めた回転数における回転周期を基準周期とし、該回転周期と基準周期を比較することにより加速命令信号あるいは減速命令信号を出力することにより回転多面鏡の回転数を制御する回転多面鏡制御装置であって、
前記回転多面鏡の回転周期を検出し回転検出信号を出力する回転検出手段と、
前記回転検出信号の周波数を(1/p)に分周して前記回転多面鏡の速度制御クロック信号とする速度制御クロック生成手段と、
前記回転検出信号の周波数を(1/q)に分周して前記回転多面鏡の速度可変クロックとする可変速度クロック発生手段と、
前記回転多面鏡があらかじめ定めた回転数で回転する際の前記ビーム検出信号の周期をp倍にした値を前記回転多面鏡の目標速度値として格納する目標速度設定手段と、
前記目標速度値を初期値とし前記速度可変クロックによりカウントアップあるいはカウントダウンすることにより回転多面鏡の目標速度を可変する目標速度可変手段と、
前記目標速度可変手段のカウントアップあるいはカウントダウン値を設定する可変範囲設定手段と、
基準クロック信号を生成する基準クロック信号発生手段と、
前記基準クロック信号を以って前記速度制御クロック信号の奇数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第1カウント手段と、
前記基準クロック信号を以って前記速度制御クロック信号の偶数番目にカウントを開始し、前記目標速度可変手段出力値までカウントする第2カウント手段とを有し、
前記第1カウント手段と前記第2カウント手段の両方がカウント停止している期間は回転多面鏡の駆動手段に加速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の両方がカウント動作をしている期間は回転多面鏡の駆動手段に減速命令信号を出力し、
前記第1カウント手段と前記第2カウント手段の一方がカウント動作をしている期間は回転多面鏡の駆動手段に加速命令信号及び減速命令信号の何れも出力しないことにより回転多面鏡の回転数を可変速制御することを特徴とする回転多面鏡制御装置。 - 前記速度制御クロック信号の前記回転検出信号に対する分周比mを前記回転多面鏡が1周する間に出力される前記回転検出信号のパルス数と同一値、整数倍値あるいは因数値とし、
前記速度可変クロックの前記回転検出信号に対する分周比qを前記速度制御クロック信号の前記ビーム検出信号に対する分周比p以上とすることを特徴とする請求項3に記載の回転多面鏡制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006051169A JP4817883B2 (ja) | 2006-02-27 | 2006-02-27 | 回転多面鏡制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006051169A JP4817883B2 (ja) | 2006-02-27 | 2006-02-27 | 回転多面鏡制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007236031A JP2007236031A (ja) | 2007-09-13 |
| JP2007236031A5 JP2007236031A5 (ja) | 2009-04-16 |
| JP4817883B2 true JP4817883B2 (ja) | 2011-11-16 |
Family
ID=38556062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006051169A Expired - Fee Related JP4817883B2 (ja) | 2006-02-27 | 2006-02-27 | 回転多面鏡制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4817883B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5765915B2 (ja) | 2009-12-22 | 2015-08-19 | キヤノン株式会社 | 画像形成装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4371628B2 (ja) * | 2002-04-01 | 2009-11-25 | キヤノン株式会社 | 画像形成装置、その制御方法 |
-
2006
- 2006-02-27 JP JP2006051169A patent/JP4817883B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007236031A (ja) | 2007-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5510125B2 (ja) | 画像形成装置及びブラシレスモータ制御プログラム | |
| JP6702768B2 (ja) | 画像形成装置 | |
| JP2011209565A (ja) | 画像形成装置 | |
| JP5246520B2 (ja) | 光走査装置、画像形成装置及び制御プログラム | |
| JPH1134390A (ja) | 画像形成装置 | |
| US8068751B2 (en) | Image forming apparatus | |
| JP4817883B2 (ja) | 回転多面鏡制御装置 | |
| JP4881012B2 (ja) | 画像形成装置 | |
| JP4850639B2 (ja) | モータ制御装置及びモータ制御方法と電子写真式画像形成装置 | |
| US10289020B2 (en) | Laser scanning device capable of detecting abnormal state, image forming apparatus, abnormality detection method | |
| JP6525571B2 (ja) | 画像形成装置 | |
| JP2014168907A (ja) | 画像形成装置、光源点灯制御方法及びプログラム | |
| JP2012113233A (ja) | 光ビーム走査装置、画像形成装置及び光ビーム走査方法 | |
| JP2001282052A (ja) | 画像形成装置 | |
| JP6781808B2 (ja) | モータ制御装置、シート搬送装置、原稿読取装置及び画像形成装置 | |
| JP2017171477A (ja) | 画像形成装置 | |
| JP2006154250A (ja) | 画像形成装置 | |
| JP2008026792A (ja) | 画像形成装置 | |
| JP2005168138A (ja) | モータ制御装置、画像形成装置、及びモータ制御方法 | |
| JP2008110517A (ja) | 画像形成装置 | |
| JP6350496B2 (ja) | 画像形成装置 | |
| JP2000289247A (ja) | 画像形成装置 | |
| JP5676994B2 (ja) | 画像形成装置 | |
| JP4823922B2 (ja) | 光走査システム | |
| JP2003224996A (ja) | ステッピングモータ駆動方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110617 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110826 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110830 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140909 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140909 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |