以下、添付の図面を参照して発明の実施の形態を説明する。
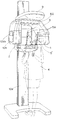
図1は、医療用X線CT撮影装置の例を示す。垂直方向に伸びる非常に剛性の高い支柱には昇降支持部が、支柱10eに沿って上下動自在に設けられている。また、昇降支持部の上フレーム9には2次元移動機構6aを介して逆U字型の旋回手段である旋回アーム3が設けられている。旋回アーム3は、その両端にX線発生器1とX線検出器2(2次元X線イメージセンサ)とを相互に対向した状態で保持し、回転制御モータ7(図6)により被写体4の頭部の周りを回転することによりX線発生器1とX線検出器2とを被写体4の周りで旋回させる。X線発生器1はX線ビームを発生し、後述するようにコーンビームX線用のスリットによりコーンビームX線を発生する。X線検出器2は、2次元検出面を備えるデジタルX線センサを備え、被写体を透過したコーンビームX線を検出する。2次元移動機構60は、旋回アーム3の内部にあり、上フレーム9で下垂保持される機械的回転軸3Aに対し、旋回アーム3を2次元に移動可能である。X線撮影の操作を行うための操作パネル10hは、旋回アームの一部、図示の例ではX線検出器2側、に設けられている。操作パネル10hには表示部10dsが設けられ、X線撮影の操作に関する表示を行う。
被写体4である患者は、旋回アーム3に設けられたX線発生器1とX線検出器2の間に立ち、顎固定装置(チンレスト)5’に顎を置き、頭部固定装置5Aによって固定される。顎固定装置5’や頭部固定装置5Aは、被写体固定手段の例である。
図2は、医療用X線CT撮影装置の他の例を示す。門型の非常に剛性の高い構造体である主フレーム10はX線CT撮影装置の全体を支持する。主フレーム10は、逆U字状の旋回アーム3を吊り下げ、回転軸により回転可能に支持する上フレーム10a、この上フレーム10aの基端部を固定保持している1対の横ビーム10b、この横ビーム10bを支えている一対の縦ビーム10c、一対の縦ビーム10cが固定載置され、この装置全体の基礎となっているベース10dから構成されている。3次元移動機構61は、ベース10dの上にあり、その上に椅子5を載置している。X線撮影の操作を行うための操作パネル10hは、一方の縦ビームの表面に設けられている。操作パネル10hには表示部10dsが設けられ、X線撮影の操作に関する表示を行う。旋回アーム3は、その両端にX線発生器1とX線検出器2(2次元X線イメージセンサ)とを相互に対向した状態で保持する。旋回アーム3は、X線発生器1とX線検出器2を被写体4(図示しない)の周りで旋回する旋回手段の1例である。旋回アーム3は、回転制御モータ7(図6)により機械的回転軸3Aの回転中心軸3aの周りに回転される。
一方、ベース10dには、3次元移動機構61が設置され、その上に患者固定用の椅子5が載置される。椅子5の上部にはヘッドレスト5aが設けられ、椅子5に座る被写体4の頭の位置を固定する。当該患者固定用の椅子5やヘッドレスト5aは、被写体固定手段の例である。したがって、被写体4の体軸4aは、旋回アーム3の回転中心軸3aに平行になり、被写体4の歯列は、回転中心軸3aに垂直な面内にある。すなわち、旋回アーム3の回転中心軸3aの被写体4の体軸4aに対する傾きは平行に維持される。
図3から図5には、旋回アーム3に設けられた2次元移動機構60の例を示す。2次元移動機構60はX軸制御モータ71とY軸制御モータ72とが独立して制御可能なように構成されている。(説明のために旋回アーム3の長手方向を図示のY軸方向とし、それに垂直な方向を図示のX軸方向とし、旋回アーム3をX軸方向、Y軸方向またはX軸方向とY軸方向を合成した方向に2次元移動可能にしているが、他の例として、2次元に移動可能な2つの軸を設けても良いことは言うまでもない。)機械的回転軸3Aは、Xテーブル71xに固定され、Xテーブル71xは移動部材71bに固定されている。Yテーブル72yに固定されたX軸制御モータ71の回転により駆動軸71aが回転する。回転した駆動軸71a上を移動部材71bが動き、図示の状態では、Yテーブル72yがX軸方向に移動され、旋回アーム3をX軸方向に動かす。また、同様にYテーブル72yは移動部材72bに固定され、梁3bに固定されたY軸制御モータ72の回転により駆動軸72aが回転し、回転した駆動軸72a上を移動部材72bが動き、図示の状態では、梁3bがY軸方向に移動する。梁3bは旋回アーム3に固定されているので、駆動軸71aと駆動軸72aの回転により、機械的回転軸3Aに対して、旋回アーム3がX軸方向、Y軸方向またはX軸方向とY軸方向を合成した方向に2次元移動可能である。機械的回転軸3Aは回転するので、Xテーブル71xとYテーブル72yの移動方向も機械的回転軸3Aの回転角度に合わせて角度変化する。
図3から図5では、旋回アーム3内に2次元移動機構60を設けた例を示した。その代わりに、X軸制御モータ71を旋回アーム3内に、Y軸制御モータ72を上フレーム9内に設けてもよいし、X軸、Y軸の両制御モータ71,72を上フレーム9内に設けてもよいし、また、図2に示す医療用X線CT撮影装置のように3次元移動機構61として患者固定椅子5に設けてもよい。図2に示す医療用X線CT撮影装置において、さらに旋回アーム3または上フレーム10aに図1と同様の2次元移動機構60を設けてもよい。図2に示す医療用X線CT撮影装置において、図示しないが、上フレーム10aを横ビーム10bに対して昇降可能とし、3次元移動機構61の代わりに2次元移動機構60をベース10dの上に配置し、その上に椅子5を載置して椅子5を2次元に移動制御するようにしてもよい。
図6に示す制御装置12は、CPU12a、記憶装置12b、入出力インタフェース12cなどを備え、CT撮影を制御する。操作者は、制御装置12に操作部13、キーボード14aまたはマウス14bにより指示を入力する。操作部13の位置設定手段13aは、椅子5の位置を設定する。なお、図示の例では操作部13の外にキーボード14a、マウス14bを図示しているが、キーボード14a、マウス14bも操作部13を構成する要素として機能しうる。CT撮影の際は、制御装置12は、旋回アーム3を旋回させる回転制御モータ7を等速度で駆動させて旋回アーム3を被写体4の周りに旋回する。X線発生器1が発生したコーンビームX線1aは、被写体に照射され、被写体を透過したX線がX線検出器2により投影データとして検出される。投影データを収集した後、演算処理手段15を用いて、投影データから被写体の3次元画像が再構成され、表示装置16に表示される。
図7において、(a)と(b)は、図1と図2のそれぞれの医療用X線撮影装置において、図6の制御装置12とX軸制御モータ71、Y軸制御モータ72、Z軸制御モータ73、回転制御モータ7とが接続される位置関係を模式的に示している。
図7の(a)は、図1の医療用X線撮影装置における制御装置12と、X軸制御モータ71、Y軸制御モータ72、Z軸制御モータ73、回転制御モータ7とが接続される位置関係を模式的に示す。上フレーム9は旋回アーム3の機械的回転軸3Aを回転可能に垂下保持する。上フレーム9の内部の回転制御モータ7は旋回アーム3の機械的回転軸3Aを回転駆動する。旋回アーム3の内部に2次元移動機構60が固設されており、X軸制御モータ71とY軸制御モータ72の駆動により、旋回アーム3を、機械的回転軸3Aに対して、より具体的には回転中心軸3aに対して、当該回転中心軸3aに直交する方向に2次元に移動可能である。支柱10eにはプーリ75が固定され、プーリ75にはワイヤ77が架けられ、ワイヤ77は上フレーム9を吊り下げている。ワイヤ77の上フレーム9と反対側の端部にはバランスウエイト76が吊り下げられている。ワイヤ77はZ軸制御モータ73により変位駆動され、上フレーム9と旋回アーム3を昇降させる。
図7の(b)は、図2の医療用X線撮影装置における制御装置12と、X軸制御モータ71、Y軸制御モータ72、Z軸制御モータ73、回転制御モータ7とが接続される位置関係を模式的に示す。上フレーム10aは旋回アーム3を回転可能に垂下保持し、上フレーム10aの内部の回転制御モータ7は機械的回転軸3Aを回転駆動する。ベース10dの内部に3次元移動機構61が固設されており、3次元移動機構61はX軸制御モータ71、Y軸制御モータ72、Z軸制御モータ73の駆動により、椅子5を3次元に移動させる。より具体的には、X軸制御モータ71、Y軸制御モータ72は、図3の2次元移動機構60と同様の構造の図示しない2次元移動機構60´により、機械的回転軸3Aの代わりに椅子5を回転中心軸3aに直交する方向に2次元に移動させ、Z軸制御モータ73は2次元移動機構60´全体を昇降させて椅子5を回転中心軸3aに平行な方向に移動させる。むろん、2次元移動機構60´上にZ軸制御モータ73を設け、Z軸制御モータ73が椅子5を昇降駆動するようにしてもよい。
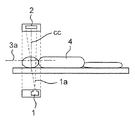
ここで、本発明の特徴であるX線発生器1とX線検出器2の位置関係について説明すると、図8に示すように、X線発生器1は、旋回アーム3の回転中心軸3aと垂直な方向に対して傾斜する方向にコーンビームX線1aを照射する。旋回アーム3の回転中心軸3aは被写体4の体軸4aに対して傾けておらず、方向が一致している。旋回アームの旋回中、X線発生器1から照射されるコーンビームX線1aの照射方向は、回転中心軸3aと垂直な方向HRに対して傾斜する一方向に向かうように設定される。そのため、旋回アームの旋回中、コーンビームX線1aは、常に回転中心軸3aと垂直な方向HRに対して一定角度で傾斜する方向に照射される。
このコーンビームX線1aを検出する位置にX線検出器2の2次元検出面2aが配置されている。すなわち、X線検出器2は、コーンビームX線1aが照射される位置に配置され、X線発生器1と対向している。このことをX線検出器2をもとにして考えると、X線検出器2に対して、X線発生器1は、コーンビームX線1aがX線検出器2を照射する位置に配置される。より厳密には、図8において、コーンビームX線1aの中心軸ccの軸方向が、回転中心軸3aと垂直な方向HRに対して傾斜している。
ここで、コーンビームX線1aの中心軸ccを説明する。図9の(a)は、コーンビームX線1aがX線検出器2の2次元検出面2aに照射される模様を、コーンビームX線1aの照射方向に直交する方向から模式的に示す。X線発生器1からのX線ビームBは、後述のように、たとえばスリット21により規制されて、コーンビームX線1aとなり、X線検出器2の2次元検出面2aに照射される。位置P1において、コーンビームX線1aの照射方向に直交する照射野RF1を想定し、位置P1と異なる位置P2において、コーンビームX線1aの照射方向に直交する照射野RF2を想定する。
図9の(b)は、コーンビームX線1aがX線検出器2の2次元検出面2aに照射される模様を示す模式的な斜視図である。図9の(c)は、照射野RF1と照射野RF2をそれぞれ正面から見た図である。照射野RF1の上下の辺の各中央において、照射野RF1の上下の辺から等距離(L1)にあり、かつ照射野RF1の左右の辺の各中央において、照射野RF1の左右の辺から等距離(H1)にある点を1c1とする。照射野RF2の上下の辺の各中央において、照射野RF2の上下の辺から等距離(L2)にあり、かつ照射野RF2の左右の辺の各中央において、照射野RF2の左右の辺から等距離(H2)にある点を1c2とする。コーンビームX線1aの中心軸ccは、点1c1、1c2を結ぶ線を形成する軸である。
X線検出器2の2次元検出面2aは、旋回アーム3の回転中心軸3aに平行に位置されるが、X線発生器1の発生するX線ビーム1aの方向は、X線検出器2の2次元検出面2aに垂直ではない。X線検出器2の2次元検出面2aは、回転中心軸3aと平行な方向に2次元の広がりを持っている。すなわち、X線発生器1は、発生するX線コーンビーム1aの方向を、旋回アーム3の回転中心軸3aに垂直な方向に対して傾けて配置される。すなわち、X線発生器1が、コーンビームX線1aの中心軸1a´が旋回アーム3の回転中心軸3aと垂直な方向に対して傾くように、旋回アーム3に配置されている。
図8の例では、被写体4の歯列は、旋回アーム3の回転中心軸3aにほぼ垂直な面内にある。そこで、X線は、被写体4の顔の斜め下側または斜め上側から関心領域R(斜線部分)の歯列に入射し、歯を透過して、斜め上方向または斜め下方向に抜けてX線検出器2に入射する。なお、X線検出器2は傾けられず、X線発生器1のみを傾けている。これにより、旋回アーム3を調整することなく、X線発生器1のみを調整してコーンビームX線1aの照射方向を調整できる。これに対して、特許文献1に記載されたCT撮影装置では、図10に参考に示すように、旋回アーム3の回転中心軸3a自体を被写体4の体軸4aに対して傾けており、X線発生器1とX線検出器2の両方を旋回アーム3ごと被写体4の体軸4aに対して傾けている。被写体4の歯列は、旋回アーム3の回転中心軸3aにほぼ垂直な面内にはなく、傾いたならび方をしている。コーンビームX線1aの照射方向は、回転中心軸3aと垂直な方向HRに対して傾斜する一方向に向かうように設定されていない。旋回アームの旋回中、コーンビームX線1aは、常に回転中心軸3aと垂直な方向HRに対して一定角度で傾斜する方向に照射されていない。
図10に記載されたCT撮影装置では、旋回アーム3の回転中心軸3aと垂直な方向と、コーンビームX線1aの中心軸ccの軸方向が一致する。図10記載のCT撮影装置で生じる問題点は、図13の説明で後述する。
このように、コーンビームX線1aの方向を旋回アーム3の回転中心軸3aに垂直な方向に対して傾けるのは、歯に装着された金属等による影響を少なくするためである。椅子5に座っている被写体4の歯列は、旋回アーム3の回転中心軸3aにほぼ垂直な面内にある。いま、歯に装着された金属等が関心領域内にたとえば複数箇所にある場合を考える。アーチファクトはX線の入射方向に沿って存在するため、コーンビームX線1aの方向を傾けない場合は、コーンビームX線1aの方向に複数箇所に金属等が存在する場合、それらの金属等の間にある部分の投影データ及び金属等の背後側の部分の投影データが失われる。このためアーチファクトが生じる。しかし、コーンビームX線1aの方向を傾けることにより、コーンビームX線1aの方向に複数の金属等が存在する確率が低下する。この確率は、複数の金属等の間隔が広がるほど低下する。これにより、画像再構成に使用できる投影データが増加するので、アーチファクトが減少する。
アーチファクトについてさらに図11と図12により説明すると、いま図11の(a)に示すように、歯列の一端側に金属部分(ハッチング部分)MTが存在していたとする。この例では、金属部分MTは2箇所の歯冠付近にあり、互いに隣り合っている。従来のように、X線発生器1からのコーンビームX線1aが回転中心軸3aに垂直な方向、図示の例ではX線検出器2の2次元検出面2aに垂直な方向に照射されるとする。旋回アーム3の回転中心軸3aは被写体4の体軸4aに対して傾けておらず、方向が一致している。このとき、(b)、(c)、(d)に図式的に斜視図、側面図、上面図を示す1例のように、アーチファクトAFは、回転を水平に横切る面において金属部分MTを中心として目立って発生する。これは、金属部分MTの陰になったところでX線吸収データが失われるためである。これに対して、1例として図12に示すように、同じ歯列に対して、X線発生器1からのコーンビームX線1aがX線検出器2の2次元検出面2aに対して斜め上方向に照射される場合、(b)、(c)、(d)に図式的に斜視図、側面図、上面図を示す1例のように、アーチファクトAFは、回転を水平に横切る面に対して、金属部分MTを中心として斜め上方向に(すなわち歯列の像が存在しない方向に)、さかづき状に伸びている。この場合、アーチファクトAFは図11の例に比べてかなり少なくなる。
図13は、図12の本願発明の構成と比較するため、図10の従来の技術による構成でCT撮影した場合の問題点を説明するための図である。(a)に示すように図11、図12の例と同様、歯列の一端側に金属部分(ハッチング部分)MTが存在している。X線発生器1は、(b)に示すように位置PL1からPL2、PL3へと回動する。位置PL1においては、(c)に示すように、X線発生器1からのコーンビームX線1aが上から下に打ち降ろすように照射されるので、アーチファクトAFも斜め下の方に延びて生じる。しかし、位置PL3においては、(d)に示すように、X線発生器1からのコーンビームX線1aが回転中心軸3aに垂直な方向、図示の例ではX線検出器2の2次元検出面2aに垂直な方向に照射されるので、アーチファクトAFも回転を水平に横切る面において金属部分MTを中心として目立って発生する。これを(e)で図式的に上面図として示すと、X線発生器1が位置PL1にあったときのアーチファクトAFは比較的少ないが、X線発生器1が位置PL3にあったときのアーチファクトAFが目だって生じるという問題がある。
好ましくは、旋回アーム3の回転中心軸3aと垂直な方向HRに対するX線発生器1の傾き角度αは−30°≦α<0°または0°<α≦30°である。30°を越えると、投影データへの金属等の影響の角度依存性は少なくなるが、歯牙の投影データ量も少なくなるので再構成に必要なデータが完全に収集できなくなってしまう。
なお、パノラマX線撮影装置においてもX線発生器1を傾けて照射を行っているが、これは、観察したい歯列の部分に下顎枝(骨)が拡大されて障害陰影となるのを防止し、歯列の画像と下顎枝の画像とが重ならないようにするためである。これに対して本発明はCT撮影に関するものであり、X線照射角度を傾ける目的及び得られる効果は異なる。CT撮影の場合、金属部分があると、その近傍の投影データも失われるので、金属部分のみならず、その周囲の正常な部分の画像再構成に大きな影響を及ぼす。もっとも、後述のように、本発明の医療用X線CT撮影装置において、パノラマX線撮影も可能にした場合、金属部分によるアーチファクト低減と、パノラマ撮影における上記の障害陰影防止との双方が可能なX線撮影装置を提供できる。
旋回アーム3の回転中心軸3aと垂直な方向に対して、コーンビームX線1aの中心軸ccのなす角度αを可変とするには、図14に示すようにX線発生器1を傾動可能とすればよい。具体的には、図14に示すように、X線発生器1の傾きを任意に変更できる傾き制御機構20を設ける。以下、詳述する。
図14において、旋回アーム3のX線発生器1側端部にはモータ74が固定されている。モータ74の駆動軸75aは旋回アーム3の旋回によりX線発生器1が旋回して行く方向とほぼ同じ方向に軸方向をとる。回転ギア75aの回動中心を貫通する回転支軸11aは駆動軸75aと同じ方向に軸方向をとり、旋回アーム3に固定されている。回転ギア75aは回転支軸11aに対し、回動可能であり、回転ギア75aの歯は駆動軸75aと噛み合って、駆動軸75aにより回動駆動される。回転ギア75aはX線発生器1の頂部に固定され、駆動軸75aにより駆動されることによりX線発生器1に回動力が伝達し、X線発生器1が図示のRD1、RD2の方向に揺動すなわち回動する。X線発生器1が回転支軸11aを中心に回動(揺動)することにより、X線発生器1から照射されるコーンビームX線1aも照射方向を変える。なお、X線発生器1は前面にスリット21を備え、X線発生器1から発生したX線ビームBはスリット21により規制され、コーンビームX線1aとなり、照射される。X線発生器1の回動操作は、操作部13の傾き設定手段13bにより行う。こうして、以上のモータ74、駆動軸75a、回転支軸11a、回転ギア75aは傾き制御機構20を構成し、旋回アーム3の回転中心軸3aと垂直な方向に対して、コーンビームX線1aの中心軸ccのなす角度αを可変できる。
また、図15は傾き制御機構20の他の実施例である。図に示すようにX線発生器1の位置は固定されており、X線発生器1と被写体4の間のX線発生部11内に配置されているコーンビームX線1aの照射範囲を限定するスリット21を、図示しないがX線発生部11内に設けられた駆動手段により上下方向に移動させることによっても、コーンビームX線1aの照射方向を、破線で示したコーンビームX線1a´の方向に変更できる。このとき、被写体4もスリット21の移動と同期して破線4´のように上下動するように構成すれば、コーンビームX線1aを水平に照射した時と同じ位置の撮影を行うことができる。上述のようにスリット21を上下方向に移動させた場合、駆動手段が小型化できるため、X線発生器自体も小型化できる利点がある。
旋回アーム3の回転中心軸3aと垂直な方向に対するX線発生器1のコーンビームX線1aの中心軸ccの、傾き角度αを可変にする場合、X線発生器1、被写体4及びX線検出器2の間の相互の相対的位置関係が変更される。これには、旋回アーム3の昇降および/または被写体4の位置の昇降と上述の傾き制御機構20とを用いればよい。旋回アーム3は、たとえば、図7に示されるワイヤ77、プーリ75、Z軸制御モータ73を用いて、支柱に対して旋回アーム3を昇降できる。また、被写体4の位置は、前述の被写体固定手段の変位により行うことができる。例えば、チンレスト5’を用いる場合(図1)、チンレスト5’の高さを変えるだけで移動できる。また、チンレストの代わりに椅子5を用いる場合(図2)、たとえば椅子5の昇降により被写体4の位置を昇降できる。
いま、図16の(a)〜(d)により、X線発生器1のビーム出射方向が調整可能な傾き制御機構20を用いた旋回アーム3の回転中心軸3aと垂直な方向に対するコーンビームX線1aの傾きの変更を説明する。(a)〜(d)において、X線発生器1から照射されるコーンビームX線1aは、たとえば図14に示す傾き制御機構20により照射方向を上下に変更できる。X線検出器2の2次元検出面2aは、コーンビームX線1aの照射野の縦幅より充分長い縦幅を有しており、コーンビームX線1aは、照射方向を変えて一定の範囲で照射野が上下に変化しても検出できる。
図16の(a)の状態では、コーンビームX線1aの中心軸ccの軸方向は、旋回アーム3の回転中心軸3aと垂直な方向と一致し、コーンビームX線1aは被写体4の関心領域Rを照射している。X線発生器1とX線検出器2は、旋回アーム3の回転中心軸3aに対して垂直な方向に互いに対向していて、X線発生器1は傾けられていない。
図16の(b)と(c)に示す状態では、傾き制御機構20によりX線発生器1の角度が変えられ、コーンビームX線1aの照射方向が上向きとなっている。コーンビームX線1aの中心軸ccの軸方向は、旋回アーム3の回転中心軸3aと垂直な方向に対し、上向きに傾いている。コーンビームX線1aはX線検出器2の2次元検出面2aの上の方を照射している。コーンビームX線1aの照射方向を変えると、そのままではコーンビームX線1aが関心領域Rを照射しなくなるので、コーンビームX線1aが関心領域Rを照射する位置にくるように、(b)と(c)に示すように旋回アーム3か被写体4の位置調整が必要である。そのために、(b)のように旋回アーム3を降下させてもよいし、(c)のように被写体4を移動させてもよい。被写体4の移動は、前述のように被写体固定手段により行うことができる。もちろん、またその双方を行ってもよい。これにより、X線発生器1、被写体4及びX線検出器2の間の相互位置関係が相対的に変更される。この状態で、(d)に示すように、X線発生器1は、コーンビームX線を斜め上方向に出射する。
図7において、旋回アーム3の昇降調整をするためのワイヤ77、プーリ75、Z軸制御モータ73、被写体の昇降調整をする被写体固定手段である図1のチンレスト5´、図2、図7の椅子5等は、旋回アーム3と被写体固定手段とを相対的に移動させる第1の移動機構の例である。旋回アーム3に対して被写体固定手段を移動させてもよいし、被写体固定手段に対して旋回アーム3を移動させてもよい。旋回アーム3と被写体固定手段とを双方移動させてもよい。
この第1の移動機構を、図16の実施例に適宜応用できる。
上述のようにX線検出器2のデジタルX線センサの2次元検出面2aが広い場合は、傾き角度αが大きくなっても、コーンビームX線1aの照射野が2次元検出面2a内に収まる。この場合、旋回アームと被写体の相対的位置関係を調整し、X線発生器1を傾けて傾き角度αを設定すればよい。
2次元検出面2aが広いデジタルX線センサは高価である。しかし、2次元検出面2aが狭いデジタルX線センサを用いる場合、傾き角度αが大きくなると、コーンビームX線1aの照射野の一部または前部が2次元検出面2aから外れてしまう。そのような場合に対応するため、X線発生器1および/またはX線検出器2をより広い範囲で上下に移動させる。これにより、コーンビームX線1aの照射野がデジタルX線センサの2次元検出面2aを外れないようにできる。
図17は、旋回アーム3において、X線発生器1とX線検出器2をそれぞれ旋回アーム3の本体に対して回転中心軸3aと平行な方向に相対的に移動させる例を示す。X線発生器1の側では、傾き制御機構20を含む筐体80が、旋回アーム3のX線発生器側の筐体部分82の中に、上下に昇降可能に取り付けられる。筐体部分82にはモータ83が固定されていて、傾き制御機構20を含む筐体80はモータ83によりねじ軸83aを回転して上下に昇降される。また、X線検出器2の側では、デジタルX線センサを含むカセット85が、旋回アーム3のX線検出器側の筐体部分86の中に、上下に昇降可能に取り付けられる。筐体部分86にはモータ87が固定されていて、カセット85はモータ87によりねじ軸87aを回転して上下に昇降される。この構成により、旋回アーム3を昇降せずに、X線発生器1および/またはX線検出器2の位置を移動できる。
また、図18は、図17に示す構成の変形例である。ここでは、X線検出器2の側において、カセット85を含むX線検出器2が、旋回アーム3のX線検出器側の筐体部分86’の中に、上下に昇降可能に取り付けられる。旋回アーム3にはモータ87’が固定されていて、筐体部分86’は、モータ87’によりねじ軸87a’を回転して上下に昇降される。X線検出器2はモータ87’により上下に昇降される。筐体80、モータ83、ねじ軸83aは、旋回アーム3の本体に対してX線検出器2の位置を回転中心軸3aと平行な方向に移動させる移動機構であり、モータ87、ねじ軸87a、筐体86´、モータ87´、ねじ軸87aは、旋回アーム3の本体に対してX線発生器1の位置を回転中心軸3aと平行な方向に移動させる移動機構である。双方の移動機構は、旋回アーム3の本体に対してX線発生器1および/またはX線検出器2を相対的に移動させる第2の移動機構の例である。
いまX線発生器1とX線検出器2がそれぞれ上述の第2の移動機構を備えている場合、X線検出器2のデジタルX線センサの2次元検出面2aが小さく、傾き角度αが大きくなったために、コーンビーム1aの照射野の一部または全部が2次元検出面2aから外れてしまう場合、たとえばX線発生器側でX線発生器1を上下に移動し、さらに、旋回アーム3および/または被写体を昇降して旋回アーム3と被写体の相対的位置(高さ)を調整する。この場合、X線検出器側でX線検出器2の位置を上下しなくてもよい。そして、傾き制御機構20によりX線発生器1をX線検出器2の検出面2aに対向させる。
または、X線検出器側でX線検出器2を上下に移動し、さらに、旋回アーム3および/または被写体を昇降して旋回アーム3と被写体の相対的位置(高さ)を調整する。この場合、X線発生器側でX線発生器1の位置を上下しなくてもよい。そして、傾き制御機構20によりデジタルX線センサをX線発生器1に対向させる。いうまでもないが、X線発生器側でX線発生器1を上下に移動し、かつ、X線検出器側でX線検出器2を上下に移動してもよい。
上述の例では、X線検出器側でX線検出器1の全体を昇降するための機構を説明したが、X線検出器1内でデジタルX線センサ104を昇降するようにしてもよい。図19に示すX線検出器2の、センサホルダーに着脱可能なX線カセット100では、長方形の基板101の中央に長方形の開口102が設けてある。開口102には、中央に上下方向にボールねじ(ねじ軸)103が取り付けられる。ボールねじ103は、デジタルX線センサ104を上下に貫通するねじ孔105と噛合している。また、デジタルX線センサ104の左右の側面に、突出部106が設けられていて、この突出部106は、開口102の両側部に設けられた凹溝107に嵌合している。ボールねじ103には、手指で回動させるリング108が設けられている。リング108を手動で回転すると、ボールねじ103が回勤し、突出部106が凹溝107に案内されて、デジタルX線センサ104が開口102の内部で上昇または下降する。なお、モータ109を設けると、ボールねじ103は自動的に駆動できる。このカセットを用いると、デジタルX線センサ104の位置調整の範囲がX線検出器内で行える。
図20は、X線検出器1内のデジタルX線センサを昇降する別の例を示す。このX線検出器2の具体的構造を示す。このX線検出器2は、上述の上下に移動可能なデジタルX線センサ104の側方に縦長の第2のデジタルX線センサ110が設けられる。この第2のX線センサ110は、パノラマ撮影のために用いられる。第2のX線センサ110で被写体を広範囲に走査撮影して第1のX線画像(パノラマ画像)を取得する。このパノラマ画像の中で操作者が関心領域を指定すると、その位置に合わせてデジタルX線センサ104を上下に昇降する。そして、指定された関心領域のCT画像を取得する。
なお、図19と図20の例では、開口102、ボールねじ103、ねじ孔105、突出部106、凹溝107、リング108またはモータ109は、X線カセット100に対してデジタルX線センサ104を移動させる第3の移動機構の1例を構成する。
また、旋回アーム3の回転中心軸3aは、本実施形態では鉛直方向に配置されているが、水平方向に配置する構成にしてもよい。たとえば図21に示す医療用X線CT撮影装置のように、ガントリにX線発生器1とX線検出器2が取り付けられ、被写体4がベッドに水平に仰臥する。ガントリは、被写体4の体軸4aに平行な回転中心の周りに回転される。ここでは、X線発生器1のみが、発生するX線ビーム1aの方向が回転軸に垂直な方向に対して斜めになるように設置され、旋回手段であるガントリの回転中心軸3aと垂直な方向に対して傾斜する方向にコーンビームX線1aの中心軸ccを設定してコーンビームX線1aが照射され、コーンビームX線1aを検出する位置にX線検出器2が配置される。Cアームを用いる場合も同様である。
以上のように、傾き制御機構はX線発生器1の傾き角度を可変にするものであってもよいが、その代わりに、X線発生器1自体の傾きを変えずとも、コーンビームX線1aが、より厳密にはコーンビームX線1aの中心軸ccが旋回アーム3の回転中心軸3aと垂直な方向に対して傾くように、たとえばコーンビームX線1aの照射方向をスリットにより可変とすれば、同じ目的は達成できる。以下、いくつかの例を述べる。
図22の(a)と(b)は、傾き制御機構20の別の実施形態を示す。X線発生器1側のハウジング内部で、X線発生器1は旋回アーム3に固定されている。X線発生器1内部のX線管(管電圧90kV、管電流10mA程度)1gからX線ビームBが照射され、後述のようにX線発生器1の前方に設けられた傾き制御機構20を構成するスリット板21cに形成されたスリット210、220、230に規制されて、さらに前方に照射されるようになっている。スリット210を通過したX線ビームBは、図示しないX線細隙ビームとなり、スリット220、230を通過したX線ビームBはコーンビームX線1aとなる。
傾き制御機構20は、固定ブロック250、モータ251、軸252、被駆動部材253、コロ固定用板254、4個のコロ255およびスリット板21cからなる。固定ブロック250は、X線発生器1に固定され、X線発生器1からのX線ビームBの通過を許容する。モータ251は、貫通孔250aを内部に有し、固定ブロック250に固定される。軸252は、モータ251により回転駆動されるネジ軸である。被駆動部材253は、内部にねじ切りされ、軸252と螺合し、軸252の回動により、軸252の軸方向に駆動され、固定ブロック250に対し、X線ビームBに交差する方向に変位する。コロ固定用板254は、固定ブロック250の前面の、X線発生器からのX線ビームBの通過を妨げない位置に固定される。コロ255は、コロ固定用板254に設けられ、スリット板21cは、コロ255に案内され、被駆動部材253に固定されて、被駆動部材253とともにX線ビームBに交差する方向に変位する。
駆動軸252により被駆動部材253を駆動すれば、スリット板21cがX線ビームBを横切る方向に変位する。スリット板21cの変位により、スリット210、220、230のいずれかが選択できる。そして、X線ビームBの照射野は、傾き制御機構20で選択されたスリット210、220、230に応じたものになる。特にスリット220、230のいずれかが選択されたときには、X線検出器2の2次元検出面2aに対し、回転中心軸3aの軸方向と平行な方向に変位することになる。
図23は、上述した傾き制御機構20の基本構成を具体的に示す。この傾き制御機構20では、図22で示すX線管1gからX線ビームBを照射するX線発生器1の照射方向前方に、スリット板21cが配置され、このスリット板21cは、図22で示すモータ251により左右にスライドできるようになっている。そして、スリット板21cには、パノラマ撮影用のX線細隙ビームを形成するための、回転中心軸3aの軸方向と平行な方向に伸長する形状のスリット210と、CT撮影用のコーンビームX線1aを形成するための、回転中心軸3aの軸方向と平行な方向に高さを異ならせた2つのスリット220、230が形成されている。このため、スリット板21cをX線の光軸に対し横方向にスライドすることによって、X線ビームBの照射野の傾きや形状が変更される。この図では、XビームBはスリット220で規制されており、コーンビームX線1aがX線発生器1から、前方に照射されている。
図24の(a)、(b)はそれぞれコーンビームX線1aの照射野の傾きを変更する様子を示している。図24において、(a)はX線ビームBがスリット220に規制されて前方の照射野220´を照射する様子を示し、(b)はX線ビームBがスリット230に規制されて照射野220´より図の上方に位置する照射野230´を照射する様子を示す。スリット230は、スリット220と同様、CT撮影用のコーンビームX線1aの形成のために用いられるが、スリット220よりも図示の高い位置に設けられており、コーンビームX線1aをスリット220の場合よりも上向きに照射するのに用いられる。傾き制御機構20では、これらスリット220、スリット230を選択することにより、コーンビームX線1aをX線検出器2の2次元検出面2aに対し、回転中心軸3aの軸方向と平行な方向に変位することになり、コーンビームX線1aの中心軸ccすなわち照射野中心が旋回アーム3の回転中心軸3aと垂直な方向に対して傾く。なお、スリット板21cの形状や、CT撮影用のスリットの個数は特に限定されず、複数であればよい。
図22、図23、図24の例は、回転中心軸3aの軸方向と平行な方向に高さを異ならせた複数のスリットをX線源9に対して変位させて照射野の位置を変更する例であるが、別の方式も有りうる。図25と図26は、いずれもその別の方式の例を原理的に示すが、図22、図23、図24の変形例なので、共通する点については説明を省略する。
図25は、傾き制御機構20の構造を原理的に説明する側面図であり、図26は傾き制御機構20の斜視図である。下記に説明する「前面」とは、X線発生器1からX線ビームBの照射を受ける方向から見た前面である。X線発生器1の前面に固定された固定ブロック250の前面の、X線源からのX線ビームBの通過を妨げない位置には、コロ固定用板254a、254bが固定される。そのうち、下側のコロ固定用板254bの底部には、モータ254cが回動するネジ軸である軸254dを下方に向けて固定される。スリット板21c1は、2枚のコロ固定用板254a、254bに設けられた4個のコロ266に案内されて、回転中心軸3aの軸方向と平行な方向に変位可能である。スリット板21c1には、X線ビームBがコーンビームX線1aになるよう規制するスリット225と、大きく開口した開口部226が形成されている。また、スリット板21c1には、内部にねじ切りされた被駆動部材254eが設けられていて、軸254dと螺合し、軸254dの回動により、軸254dの軸方向に駆動される。従って、軸254dを駆動すれば、スリット板21c1が図の上下、すなわち回転中心軸3aの軸方向と平行な方向に変位する。
コロ固定用板254a、254bの前面には、4本のピン261により、2枚のコロ固定用板262a、262bが、変位するスリット板21c1の移動を妨げないように挟む形で固定される。コロ固定用板262a、262bの前面には4個のコロ266が設けられている。上側のコロ固定用板262aの上部には、モータ262cが回動するネジ軸である軸262dを側方に向けて固定される。スリット板21c2には、回転中心軸3aの軸方向と平行な方向に伸長する形状のスリット210が形成されている。スリット210はパノラマ撮影用のスリットである。また、スリット板21c2には、大きく開口した開口部227が形成されている。
図1の医療用CTX線撮影装置と図2の医療用CTX線撮影装置は、いずれも旋回アーム3または被写体固定手段を回転中心軸3aに直交する2次元の方向に移動制御できるので、パノラマ撮影を行うことができる。この場合、スリット210でX線ビームBを規制して、X線細隙ビームを形成し、このX線細隙ビームが周知のパノラマ撮影の軌道を通るように2次元移動制御する。X線細隙ビームを、前述の図20に示すデジタルX線センサ104に設けた第2のX線センサ110に照射してパノラマ撮影を行ってもよいし、後述の図27に示すカセット2a´の2次元検出面2aの照射野210´に照射してパノラマ撮影を行ってもよい。
図26において、スリット板21c2の前面には、内部にねじ切りされた被駆動部材262eが設けられていて、軸262dと螺合し、軸262dの回動により、軸262dの軸方向に駆動される。従って、軸262dを駆動すれば、スリット板21c2がX線ビームBを横切る方向に変位する。このとき、コロ266は、スリット板21c2の変位を案内する。スリット板21c2に、図示するように、セファロスタット用(頭部X線規格写真撮影用)のスリット215を設けてもよい。なお、頭部X線規格写真撮影を行う装置構成は、例えば本出願人の出願に係る特開2002−17718号公報記載のX線撮影装置や、特開2003−245277号公報記載のX線撮影装置を適宜応用しうる。
スリット225はCT撮影用のスリットである。CT撮影の場合、スリット225がX線ビームBを規制する位置にくるよう、スリット板21c1をモータ254cにより変位させる。その変位量の調整により、回転中心軸3aの軸方向と平行な方向へのスリット225の変位調節が可能であり、そのためにX線ビームBはコーンビームX線1aになるよう規制され、X線検出器2の2次元検出面に対し、照射野を回転中心軸3aの軸方向と平行な方向に変更できる。この場合、開口部227がスリット225の前方に来るよう、スリット板21c2がモータ262cにより変位される。なお、開口部227はスリット225を通過したX線ビームBが通過を妨げられない大きさに設定されている。
パノラマ撮影の場合には、スリット210がX線ビームBを規制する位置にくるよう、スリット板21c2がモータ262cにより変位される。このとき、スリット210を通過するX線ビームBが通過を妨げられないように、開口部226がスリット210の背後にくるよう、スリット板21c1がモータ254cにより変位される。なお、開口部226はスリット210や開口部227を通過するX線ビームBが通過を妨げられない大きさに設定されている。
頭部X線規格写真撮影の場合は、上記のスリット210に代えてスリット215がX線ビームBを規制する位置にくるよう、スリット板21c1を変位させればよい。
開口部227の大きさは、X線ビームBの照射野が、後述する図27で示すカセット2´aの2次元検出面2aの全体またはほぼ全体を照射し、2次元検出面2a以外の箇所を照射しない形状となるよう規制する大きさに設定することもできる。開口部227を選択し、その背後に開口部226が位置するようスリット板21c1、21c2を変位調整することで、図27で示すカセット2´aの2次元検出面2aの全体またはほぼ全体をコーンビームX線で照射して、広い領域のCT撮影やX線透視画像の撮影をすることができる。
図27で示すカセット2´bを用いる場合は、開口部227の大きさは、X線ビームの照射野が、図27で示すカセット2´bの2次元検出面2aの全体またはほぼ全体を照射し、2次元検出面2a以外の箇所を照射しない形状となるよう規制する大きさに設定すればよい。このように、開口部227は、スリット227としても機能することが可能である。
図27は、旋回アーム3のX線検出器1側の内部の具体的構成を示した斜視図である。X線検出器2は、旋回アーム3に固着される基部88と、基部88内をX線検出器2の旋回方向とほぼ平行な方向に変位するセンサホルダとして機能する可動部89と、可動部89に装着されるカセット2´とから構成される。カセット2´は2次元検出面2aを備えている。基部88には可動部89に設けられた被案内部89bを案内する案内部88dが設けられ、可動部89は、たとえばモータ88aと回転軸88bからなるカセット移動手段88cにより変位駆動される。図示の例では、可動部89の上方に形成した溝の内部が回転軸88bに接して、回転軸88bの回転により可動部89が駆動される。この可動部89にはカセット2´を装着するための受入部89aが設けられ、そこにはカセット2´の1例として、図示のカセット2´aが装着される。別タイプのカセット2´bが装着されるようにしてもよい。
カセット2´a、2´bは、いずれも、受光したX線を検出する2次元検出面2aを備える。カセット2´aの2次元検出面2aの縦の幅は、パノラマ撮影に適した、たとえば14〜15cm程度に設定され、横の幅も縦と同じ程度に設定される。このカセット2´aの2次元検出面2aに対し、たとえば前述の図22や図26に示される傾き制御機構20を用いて、規制されたX線ビームを照射できる。
このカセット2´aの2次元検出面2aに対し、スリット板21cを変位調整して、X線ビームBをスリット210で規制してX線細隙ビームを形成して照射し、パノラマ撮影をすることができる。この場合、カセット2´aの2次元検出面2a上で、スリット210に対応した照射野210´の部分にX線細隙ビームが照射される。
図22に示される傾き制御機構を用いた場合、スリット板21cを変位調整して、X線ビームBをスリット220で規制してコーンビームX線を照射してCT撮影ができる。この場合、カセット2´aの2次元検出面2a上で、スリット220に対応した照射野220´の部分にX線細隙ビームが部分的に照射される。
同様に、スリット板21cを変位調整して、X線ビームBをスリット230で規制してコーンビームX線1aを照射してCT撮影をすることができる。この場合、カセット2´aの2次元検出面2a上で、スリット230に対応した照射野230´の部分にコーンビームX線1aが部分的に照射される。照射野230´は、照射野220´よりも2次元検出面2aの上では、上方に位置する。
図26に示される傾き制御機構を用いた場合、スリット板21c1、21c2を変位調整して、X線ビームBをスリット225で規制してコーンビームX線1aを照射してCT撮影することができる。この場合、カセット2´aの2次元検出面2a上で、スリット225に対応した照射野が、たとえば図28の220´の部分や230´の部分に部分的に照射される。スリット225は無段階で変位できるので、照射野220´、230´以外の部分も無段階に照射調整できる。
前述のように、開口部227の大きさを、X線ビームBの照射野が、カセット2´aの2次元検出面2aの全体またはほぼ全体を照射し、2次元検出面2a以外の箇所を照射しない形状となるよう規制する大きさに設定した場合は、コーンビームX線1aを2次元検出面2aの全体またはほぼ全体を示す照射野227´の部分に照射できる。
図27に示すカセット2´bは、2次元検出面2aの横の幅がカセット2´aにおける2次元検出面2aの横の幅と異なるのみであり、他は同じであるので、カセット2´aについて述べた事項の説明は繰り返さない。カセット2´aにおいては、2次元検出面2aの横の幅が照射野220´、照射野230´の幅よりも大きく設定されているところ、カセット2´bにおいては、2次元検出面2aの横の幅が照射野220´、照射野230´の幅と同じ、またはほぼ同じ幅に設定されているのみである。2次元検出面2aが大きいほどX線検出器2の価格は高額になるので、カセット2´bはカセット2´aに比べて低コストで提供できる。
スリット220で規制されたX線ビームの照射方向、スリット230で規制されたX線ビームの照射方向の少なくとも一方は、図8で示されたX線ビーム1aのように、X線検出器2の2次元検出面2aに垂直でない方向に設定される。同様に、スリット225で規制されたX線の照射方向は、スリット225の可動範囲の中で、少なくとも一部が図8で示されたX線ビーム1aのように、X線検出器2の2次元検出面2aに垂直でない方向をとるように設定される。
図28において、(a)は、図22、図26に記載の医療用X線CT撮影装置のX線発生器1と図27のX線検出器2のカセット2´の位置関係の1例を示し、(b)は、X線発生器1を(a)の配置とは異なる位置に配置した場合の位置関係の1例を示す。(a)においては、コーンビームX線1aが前述の照射野220´、照射野230´に照射される様子を示している。2次元検出面2aに垂直な方向、この例では旋回アーム3の回転中心軸3aに垂直な方向に対し、照射野220´についてはコーンビームX線1aの中心軸ccがα1の角度をなしている。照射野230´についてはコーンビームX線1aの中心軸ccがα2の角度をなしている。関心領域R1は、中心軸ccがα1の角度をなすコーンビームX線1aに照射される。関心領域R2は、中心軸ccがα2の角度をなすコーンビームX線1aに照射される。照射野220´におけるコーンビームX線1aの中心軸ccも、照射野230´におけるコーンビームX線1aの中心軸ccも、共に回転中心軸3aに垂直な方向ではなく、被写体4に対し、打ち上げるように下から上方に向かって入射していることがわかる。関心領域R1、関心領域R2ともに打ち上げるように下から上方に向かって照射される。2次元検出面2aはパノラマ撮影にも用いることができるので、後述のように、この配置でパノラマ撮影も可能である。
図28の(b)においても、コーンビームX線1aが前述の照射野220´、照射野230´に照射される様子を示している。回転中心軸3aに垂直な方向に対し、照射野230´についてはコーンビームX線1aの中心軸ccがα2の角度をなしているが、照射野220´についてはコーンビームX線1aの中心軸ccが回転中心軸3aに垂直な方向と一致している。すなわち回転中心軸3aに垂直な方向に対し、照射野220´についてのコーンビームX線1aの中心軸ccのなす角度α1はゼロである。関心領域R1は、中心軸ccがα1の角度をなすコーンビームX線1aに照射される。関心領域R2は、中心軸ccがα2の角度をなすコーンビームX線1aに照射される。関心領域R2は打ち上げるように下から上方に向かって照射されるが、関心領域R1は、回転中心軸3aに垂直な方向からコーンビームX線1aに照射される。照射野230´についてはコーンビームX線1aが回転中心軸3aに垂直な方向ではなく、被写体4に対し、打ち上げるように下から上方に向かって入射しており、照射野220´についてはコーンビームX線1aが回転中心軸3aに垂直な方向に入射している。照射野220´は2次元検出面2aの下端に位置するため、2次元検出面2aの大部分に対し、コーンビームX線1aは打ち上げるように下から上方に向かって入射してくる。このため、照射野230´に照射するように、少なくともコーンビームX線1aが上向きになる範囲で、被写体を打ち上げるように下から上方に向かってX線照射してX線撮影することも可能であるが、照射野220´に照射するように、回転中心軸3aに垂直な方向からコーンビームX線1aを照射して被写体をX線撮影することも可能である。2次元検出面2aはパノラマ撮影にも用いることができるので、後述のように、この配置でパノラマ撮影も可能である。
以上より、図22と図26の医療用X線CT撮影装置は、単一の2次元検出面2aにより、歯同士の重なりを避けて、好条件でパノラマ撮影が可能であると共に、金属アーチファクトを避けて好条件でCT撮影をすることが可能である。かつ、CT撮影において、2次元検出面2aに対し、CT撮影用の照射野を回転中心軸3aの軸方向と平行な方向に変更することが可能であるので、CT撮影したい対象部位のみを目標にして細かくコーンビームX線1aの照射ができ、余分なX線被爆を避けることができる。この構成は、CT撮影のための照射野の位置設定のために旋回アーム3を昇降しなくともよいという利点があり、図1の医療用X線CT撮影装置のように、チンレスト5’など被写体固定手段が旋回アーム3と共に昇降する構造において、特に有効である。本実施形態において、コーンビームX線1aは、被写体の一部である局所部位の撮影に用いることができる。
なお、局所照射X線CT撮影については、本出願人の出願に係る特開2000-139902号公報に詳細が説明されている。本発明においては、たとえば、この特開2000-139902号公報に記載された局所照射X線CT撮影方法や局所照射X線CT撮影装置を適宜用いることができる。
図29の(a)と(b)は、局所部位の撮影を示す。図29には被写体4である人間の頭部にある歯列弓Sが示され、歯列弓Sの一部を中心とした、撮影対象となる局所部位4Pが示されている。局所部位4Pは関心領域Rでもある。局所部位4Pの中心に旋回アーム3の回転中心軸3aを設定し、X線発生器1とX線検出器2が局所部位4Pを挟んで対向しつつ旋回し、X線発生器1から照射されたコーンビームX線1aが局所部位4Pを照射して、旋回アーム3が180°以上の旋回角度で旋回し、局所部位4Pの180°以上の分のX線投影データを2次元検出面2aで取得する。図29において、(a)では、旋回アーム3が旋回角度θ分旋回し、X線発生器1が位置PS1から位置PS2に移動した様子を模式的に示し、(b)では、図29の(a)のX線発生器1が位置PS2にあるときの様子を模式的に示している。(b)の(b−2)の部分は局所部位4PにコーンビームX線1aが照射される様子を平面視した図であり、(b−1)の部分は局所部位4Pを透過したコーンビームX線1aを2次元検出面2aで受けた投影データの値(例えばX線減衰量)を模式的に示している。なお、(b)は、2次元検出面2aでどのように局所部位4Pの投影データを得るかを視覚的に示すための図なので、(a)に示す局所部位4Pおよびその周囲の形状を忠実に再現していない。
2次元検出面2aは局所部位4Pに照射されたコーンビームX線1aの端から端までを、図29の(b)の(b−1)における−rからrの範囲において検出する。CTの断層画像を得るための再構成計算では、(b−1)における−rからrの範囲以外の投影データの値をゼロとして計算しても構わない。これは、局所部位4P以外の部分を通過するX線のデータが、常に照射される局所部位4Pに比べて一時的に照射される部分のデータであることから、誤差の範囲にとどまるためである。X線検出器2の2次元検出面2aが、局所部位4Pに対応する程度の面積であるとき、上記の局所部位の撮影が有効である。
図30の(a)は、図28の(a)のX線発生器1と図27に示すX線検出器2のカセット2´の位置関係により、X線発生器側でたとえば前述の図22、図26のスリット210を選択して、X線発生器1からのX線ビームBを規制してX線細隙ビーム1anを形成し、2次元検出面2aに照射する模様を示している。この状態で、パノラマ撮影を行うことができる。2次元検出面2a上では、図27に示す照射野210´にX線細隙ビーム1anが照射される。
図30の(a)の配置では、被写体に入射するX線は全てX線検出器2の2次元検出面2aに垂直な方向ではなく、被写体4に対し、打ち上げるように下から上方に向かって入射するので、歯同士の重複を避けてパノラマ画像を取得することができる。
図30の(b)は、図30の(a)と同様、図28の(a)のX線発生器1からのX線細隙ビーム1anを、図27に示すX線検出器2のカセット2´の2次元検出面2aに照射する模様を示している。図30の(a)と異なるのは、X線発生器1とX線検出器2のカセット2´の位置関係が図28の(a)の位置関係ではなく、図28の(b)の位置関係であるという点である。図30の(a)と異なり、図30の(b)の配置では、被写体に入射するX線の全てが被写体4に対し、打ち上げるように下から上方に向かって入射しているわけではないが、大部分のX線は被写体4に対し、打ち上げるように下から上方に向かって入射しているので、歯同士の重複をおおむね避けてパノラマ画像を取得することができる。
1 X線発生器、 1a コーンビームX線、 1an X線細隙ビーム、 2 X線検出器、 2a 2次元検出面、 3 旋回アーム(旋回手段)、 3a 回転中心軸、 4 被写体、 4a 被写体の体軸、 20 傾き制御機構、 5、5´、5A、5a 被写体固定手段、 74、75、73、5´、5 第1の移動機構、 80、83、83a、87、87a、86´、87´、87a 第2の移動機構、 102、103、105、106、107、108、109 第3の移動機構、 100、2´ カセット、 104 デジタルX線センサ、 21、210、215、220、225、230 スリット、 cc コーンビームX線の中心軸。