JP4641237B2 - 多自由度アクチュエータ - Google Patents
多自由度アクチュエータ Download PDFInfo
- Publication number
- JP4641237B2 JP4641237B2 JP2005280681A JP2005280681A JP4641237B2 JP 4641237 B2 JP4641237 B2 JP 4641237B2 JP 2005280681 A JP2005280681 A JP 2005280681A JP 2005280681 A JP2005280681 A JP 2005280681A JP 4641237 B2 JP4641237 B2 JP 4641237B2
- Authority
- JP
- Japan
- Prior art keywords
- output shaft
- axis
- swing
- casing
- connecting member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
前記第2の連結部材の両端部に回動可能に連結され、前記第2の曲面ガイドに揺動可能に支持される第2の移動子と、を有し、前記第1の揺動機構と前記第2の揺動機構は、前記第1の駆動部及び前記第2の駆動部の駆動力により前記出力軸が揺動動作する際、前記出力軸の揺動方向に応じて相対的に回動することを特徴とする。
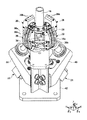
12 ケーシング
16 出力軸
18,208,308 第1の揺動機構
20,220,310 第2の揺動機構
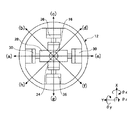
22,102,222,312 第1の駆動部
24,104,224,314 第2の駆動部
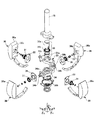
26 第1の曲面ガイド
28,228 第1の連結部材
30,230 第1の移動子
32 第2の曲面ガイド
34,234 第2の連結部材
36,236 第2の移動子
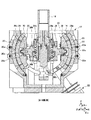
38 軸受部
31,37 軸受
40 ころがり軸受
68,70 位置センサ
48,50 サーボモータ
74 制御部
102,104 駆動部
106,108 固定子
114,116 永久磁石
226,232 球面ガイド
241〜244 エアシリンダ室(圧力室)
245〜248 ピストン
256 圧力制御弁
261〜264 4方電磁弁
270 制御部
304 テーブル
Claims (10)
- ケーシングと、
先端が該ケーシングの内部に挿入され、基端が前記ケーシングの開口部より外部に延在する出力軸と、
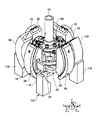
前記ケーシングの内部に収納され、前記出力軸の軸線と直交する軸回りに前記出力軸の基端を揺動可能に支持する第1の揺動機構と、
前記ケーシングの内部で前記第1の揺動機構と交差するように前記出力軸の軸線上に対向配置され、前記出力軸の軸線と直交する他方向の軸回りに前記出力軸の基端を揺動可能に支持する第2の揺動機構と、
前記第1の揺動機構を駆動して前記出力軸を一方向に揺動させる第1の駆動部と、
前記第2の揺動機構を駆動して前記出力軸を他方向に揺動させる第2の駆動部と、
を有し、
前記第1の揺動機構は、
前記出力軸の基端に対し直交する軸回りの揺動をガイドする第1の曲面ガイドと、
前記出力軸の基端が固定され、前記出力軸の軸線と直交する方向に延在形成された第1の連結部材と、
前記第1の連結部材の両端部に回動可能に連結され、前記第1の曲面ガイドに揺動可能に支持される第1の移動子と、を有し、
前記第2の揺動機構は、
前記出力軸の基端に対し前記第1の曲面ガイドと異なる位置で前記出力軸の基端に対し直交する他の軸回りの揺動をガイドする第2の曲面ガイドと、
前記出力軸の軸線上で前記第1の連結部材と交差するように対向配置され、前記第1の連結部材に対して相対的に回動可能に組み合わされた第2の連結部材と、
前記第2の連結部材の両端部に回動可能に連結され、前記第2の曲面ガイドに揺動可能に支持される第2の移動子と、
を有し、
前記第1の揺動機構と前記第2の揺動機構は、前記第1の駆動部及び前記第2の駆動部の駆動力により前記出力軸が揺動動作する際、前記出力軸の揺動方向に応じて相対的に回動することを特徴とする多自由度アクチュエータ。 - ケーシングと、
先端が該ケーシングの内部に挿入され、基端が前記ケーシングの開口部より外部に延在する出力軸と、
前記ケーシングの内部に設けられ、前記出力軸の基端に対し直交する軸回りの揺動をガイドする一対の第1の曲面ガイドと、
前記ケーシングの内部で前記出力軸の基端に対し前記一対の第1の曲面ガイドと異なる位置で前記出力軸の基端に対し直交する他の軸回りの揺動をガイドする一対の第2の曲面ガイドと、
前記出力軸の基端が固定され、前記出力軸の軸線と直交する方向に延在形成された第1の連結部材と、
前記出力軸の軸線上で前記第1の連結部材と交差するように対向配置され、前記第1の連結部材に対して相対的に回動可能に組み合わされた第2の連結部材と、
前記第1の連結部材の両端部に回動可能に連結され、前記一対の第1の曲面ガイドに揺動可能に支持される一対の第1の移動子と、
前記第2の連結部材の両端部に回動可能に連結され、前記一対の第2の曲面ガイドに揺動可能に支持される一対の第2の移動子と、
前記第1の移動子を駆動して前記出力軸を一方向に揺動させる第1の駆動部と、
前記第2の移動子を駆動して前記出力軸を他方向に揺動させる第2の駆動部と、
を有することを特徴とする多自由度アクチュエータ。 - 前記第1の移動子及び前記第2の移動子は、同一の曲率半径に沿って揺動させることを特徴とする請求項1または2の何れかに記載の多自由度アクチュエータ。
- 前記第1の連結部材と前記第2の連結部材は、前記出力軸と同軸上に配された前記第1の連結部材の中央孔及び前記第2の連結部材の中央孔を貫通する筒状軸受を介して回動可能に連結されたことを特徴とする請求項1乃至3の何れかに記載の多自由度アクチュエータ。
- 前記第1の曲面ガイド及び前記第2の曲面ガイドは、前記移動子の揺動位置を検出する位置検出手段を有することを特徴とする請求項1乃至4の何れかに記載の多自由度アクチュエータ。
- 前記第1の曲面ガイド及び前記第2の曲面ガイドは、同一中心からの曲率半径上に形成されたガイド面を有することを特徴とする請求項1乃至5の何れかに記載の多自由度アクチュエータ。
- 前記ガイド面には、前記移動子の揺動動作に伴う摺動抵抗を軽減する低摩擦部材が設けられたことを特徴とする請求項6に記載の多自由度アクチュエータ。
- 前記第1の駆動部及び前記第2の駆動部は、供給される印加電圧に応じた電磁力による駆動力を発生し、前記移動子を駆動する駆動手段を有することを特徴とする請求項1又は2に記載の多自由度アクチュエータ。
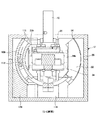
- 前記第1の駆動部及び前記第2の駆動部は、供給される作動流体の圧力により駆動力を発生し、前記移動子を駆動する駆動手段を有することを特徴とする請求項1又は2に記載の多自由度アクチュエータ。
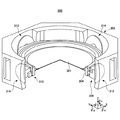
- ケーシングと、
該ケーシングの内部に挿入されたテーブルと、
前記ケーシングの軸線と直交する一方向の軸回りに前記テーブルを揺動可能に支持する第1の揺動機構と、
前記第1の揺動機構と交差するように前記テーブルの軸線上に対向配置され、前記テーブルの軸線と直交する他方向の軸回りに前記テーブルを揺動可能に支持する第2の揺動機構と、
前記一方向の軸回りに湾曲した第1のシリンダ室と、作動流体の圧力により前記第1のシリンダ室に沿って回動する第1のピストンとを有し、前記第1のピストンの回動と共に前記第1の揺動機構を駆動して前記テーブルを一方向に揺動させる第1の駆動部と、
前記他方向の軸回りに湾曲した第2のシリンダ室と、作動流体の圧力により該第2のシリンダ室に沿って回動する第2のピストンとを有し、前記第2のピストンの回動と共に前記第2の揺動機構を駆動して前記テーブルを他方向に揺動させる第2の駆動部と、
を有し、
前記第1の揺動機構と前記第2の揺動機構は、前記第1の駆動部及び前記第2の駆動部の駆動力により前記テーブルが揺動動作する際、前記テーブルの揺動方向に応じて相対的に回動することを特徴とする多自由度アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005280681A JP4641237B2 (ja) | 2005-09-27 | 2005-09-27 | 多自由度アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005280681A JP4641237B2 (ja) | 2005-09-27 | 2005-09-27 | 多自由度アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007097267A JP2007097267A (ja) | 2007-04-12 |
| JP4641237B2 true JP4641237B2 (ja) | 2011-03-02 |
Family
ID=37982281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005280681A Expired - Fee Related JP4641237B2 (ja) | 2005-09-27 | 2005-09-27 | 多自由度アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4641237B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101419831B1 (ko) * | 2012-02-17 | 2014-07-16 | 한양대학교 산학협력단 | 다자유도 구동장치 |
| CN108886316A (zh) * | 2016-03-30 | 2018-11-23 | 松下知识产权经营株式会社 | 致动器和线圈单元 |
| CN109983677A (zh) * | 2016-11-16 | 2019-07-05 | 松下知识产权经营株式会社 | 致动器和照相机装置 |
| CN110870182A (zh) * | 2017-07-18 | 2020-03-06 | 松下知识产权经营株式会社 | 致动器和相机装置 |
| CN110535285A (zh) * | 2019-08-05 | 2019-12-03 | 河北科技大学 | 多自由度电机 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0685630B2 (ja) * | 1984-03-28 | 1994-10-26 | 工業技術院長 | 3次元モ−タ |
| JPH0714269B2 (ja) * | 1986-03-22 | 1995-02-15 | 日本電信電話株式会社 | 球面モ−タ |
| JPH0516186U (ja) * | 1991-08-22 | 1993-03-02 | 三菱重工業株式会社 | 多自由度アクチユエーター |
| JPH06284673A (ja) * | 1993-03-24 | 1994-10-07 | Iwao Shibata | 多次元作動アクチュエータ |
| JP2003324936A (ja) * | 2002-04-25 | 2003-11-14 | Matsushita Electric Ind Co Ltd | 球面モータ |
| JP2004329726A (ja) * | 2003-05-12 | 2004-11-25 | Hitachi Ltd | 手術装置 |
| JP2005033989A (ja) * | 2003-06-20 | 2005-02-03 | Victor Co Of Japan Ltd | 多自由度振動型アクチュエータ |
-
2005
- 2005-09-27 JP JP2005280681A patent/JP4641237B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007097267A (ja) | 2007-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7281447B2 (en) | Articulated mechanism comprising a cable reduction gear for use in a robot arm | |
| JP3413730B2 (ja) | 水平多関節ロボット | |
| KR102838341B1 (ko) | 표면들의 로봇-보조 기계가공을 위한 장치 | |
| US20110113915A1 (en) | Parallel robot | |
| JP2014124742A (ja) | アーム駆動装置 | |
| JP2010532265A (ja) | 高い動力学のレーザ加工機 | |
| JP4641237B2 (ja) | 多自由度アクチュエータ | |
| JP6110620B2 (ja) | パラレルリンクロボット | |
| WO2016043302A1 (ja) | ロボットにおける回転駆動機構 | |
| JP5171119B2 (ja) | 往復運動機構及びピックアンドプレイス装置 | |
| JP2010076089A (ja) | 関節駆動装置、および多関節アーム装置 | |
| JP6921839B2 (ja) | クローズドセンタ圧力流量制御弁 | |
| JP6799445B2 (ja) | ロボットの関節構造体 | |
| KR100816360B1 (ko) | 내모멘트 대책 정압기체 베어링기구 | |
| CN120269604A (zh) | 一种客制化多电机驱动式机器人关节及电机双环控制方法 | |
| KR20050054821A (ko) | 로봇 | |
| JP6043561B2 (ja) | パラレルリンクロボット | |
| JP2020192625A (ja) | パラレルリンクロボット | |
| JP2547512B2 (ja) | 産業用ロボット | |
| JP7824183B2 (ja) | 作業機械システム | |
| JP2014065122A (ja) | パラレルリンクロボット | |
| JP2760581B2 (ja) | 位置決め装置 | |
| JP6783474B2 (ja) | テーブル駆動装置及び該テーブル駆動装置を具備した作業システム | |
| JPH0829513B2 (ja) | 産業用ロボツト | |
| JP6062305B2 (ja) | アクチュエータユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071016 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101124 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101126 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131210 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |