JP4635398B2 - ロボット装置 - Google Patents
ロボット装置 Download PDFInfo
- Publication number
- JP4635398B2 JP4635398B2 JP2001268129A JP2001268129A JP4635398B2 JP 4635398 B2 JP4635398 B2 JP 4635398B2 JP 2001268129 A JP2001268129 A JP 2001268129A JP 2001268129 A JP2001268129 A JP 2001268129A JP 4635398 B2 JP4635398 B2 JP 4635398B2
- Authority
- JP
- Japan
- Prior art keywords
- fpc
- robot apparatus
- flexible circuit
- shoulder
- circuit board
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Toys (AREA)
- Manipulator (AREA)
Description
【発明の属する技術分野】
本体部に対して可動する可動部を有し、該可動部を介して信号を伝達するロボット装置に関し、可撓性回路基板を用いて信号を可動部に伝導するロボット装置に関する。
【0002】
【従来の技術】
電気的又は磁気的な作用を用いて人間(生物)の動作に似た運動を行う機械装置を「ロボット」という。我が国においてロボットが普及し始めたのは、1960年代末からであるが、その多くは、工場における生産作業の自動化・無人化等を目的としたマニピュレータや搬送ロボット等の産業用ロボット(Industrial Robot)であった。
【0003】
最近では、人間のパートナーとして生活を支援する、すなわち住環境その他の日常生活上の様々な場面における人的活動を支援する実用ロボットの開発が進められている。このような実用ロボットは、産業用ロボットとは異なり、人間の生活環境の様々な局面において、個々に個性の相違した人間、又は様々な環境への適応方法を自ら学習する能力を備えている。例えば、犬、猫のように4足歩行の動物の身体メカニズムやその動作を模した「ペット型」ロボット、或いは、2足直立歩行を行う動物の身体メカニズムや動作をモデルにしてデザインされた「人間型」又は「人間形」ロボット(Humanoid Robot)等の脚式移動ロボットは、既に実用化されつつある。これらの脚式移動ロボットは、動物や人間の容姿にできるだけ近い外観形状を有し、産業用ロボットと比較して動物や人間の動作に近い動作を行うことができ、さらにエンターテインメント性を重視した様々な動作を行うことができるため、エンターテインメントロボットと呼称される場合もある。
【0004】
【発明が解決しようとする課題】
従来のロボット装置は、肩、肘、脚等の部位にアクチュエータを搭載することで可動とされ、より動物や人間に近い動作が表出できるようになっている。
【0005】
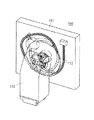
図20に従来のロボット装置の肩部分のアクチュエータの例を示す。アクチュエータ150は、胸部151と上腕部152とを備えており、両者が肩関節の周りを回って胸部にあるコネクタと接続された電線(ハーネス)153によって接続されていた。
【0006】
この方式では、ハーネス153の変形しやすさから、線材をロボット装置の構造材の隙間に自由に配置できるという利点がある反面、上腕部の繰り返し動作等によって、ロボット装置内におけるハーネス153の位置が所定位置に決まらない場合があった。この場合は、多くの固定部材を必要としていた。
【0007】
また、回転駆動部分では、変形する姿勢が一定に決まらず、組み立て時に生じるロボット装置毎のばらつきによって、局所的に過負荷が加わったり、湾曲した際の最小の曲率半径が小さくなり過ぎることで断線したりするおそれがあった。さらに線材としては、特殊な高可撓性線材を用いるため、製造コストが嵩んでいた。
【0008】
そこで本発明は、このような従来の実情に鑑みて提案されたものであり、信号伝達線のアクチュエータ動作による変形を設計時に制御し、断線等の不具合を防止するロボット装置を提供することを目的とする。
【0009】
【課題を解決するための手段】
本発明の説明に供するロボット装置は、本体部に対して可動する可動部を有し、該可動部を介して信号を伝達するロボット装置において、可動部と本体部との間で信号を伝達する可撓性回路基板と、可動部の動きに応じて可撓性回路基板が完全に折れ曲がることなく湾曲する空間を確保する領域と、可撓性回路基板の最小曲率半径を規定する構造材とを備える。
【0010】
本発明の説明に供するロボット装置において、可撓性回路基板は、矩形薄板形状を呈し、可撓性回路基板は、可動部を駆動する駆動手段に対して信号を伝達するために用いられる。
【0011】
上述した目的を達成するために、本発明に係るロボット装置は、本体部に対して可動する可動部を有し、該可動部を介して信号を伝達するロボット装置において、可動部と本体部との間で信号を伝達する複数の可撓性回路基板と、複数の可撓性回路基板を重ね合わせて固定する留め部材とを備え、上記複数の可撓性回路基板は、片端が位置決めされ、円弧状に湾曲され、位置決め及び抜け止め用係合部を備え、上記留め部材は、被係合部を備え、上記複数の可撓性回路基板を重ね合わせて円弧状に湾曲した際に、上記位置決め及び抜け止め用係合部と上記被係合部とが係合することにより、上記円弧の内側に位置する可撓性回路基板の曲率半径が外側に位置する可撓性回路基板の曲率半径よりも小となるように固定する。
【0013】
本発明に係るロボット装置において、可撓性回路基板は、矩形薄板形状を呈し、可撓性回路基板は、可動部を駆動する駆動手段に対して信号、電力を伝達するために用いられる。本発明に係るロボット装置では、可撓性回路基板には、位置決め及び抜け止め用係合部が設けられ、留め部材には、被係合部が設けられていることが好ましい。
【0014】
【発明の実施の形態】
本発明の具体例として示すロボット装置は、頭部と上肢と体幹部と下肢とを備え、上肢及び下肢、又は下肢のみを移動手段とする脚式移動ロボットである。脚式移動ロボットには、4足歩行の動物の身体メカニズムやその動きを模倣したペット型ロボットや、下肢のみを移動手段として使用する2足歩行の動物の身体メカニズムやその動きを模倣したロボット装置があるが、本実施の形態として示すロボット装置は、4足歩行タイプの脚式移動ロボットである。
【0015】
そして、本発明の具体例として示すロボット装置は、本体部に対して可動するの動きを制御する制御回路と、該制御回路からの制御信号を頭部、上肢、下肢等へ伝達する可撓性回路基板と、可動部の動きに応じて可撓性回路基板が撓曲する空間を確保する撓曲領域と、可撓性回路基板の最小撓曲半径を規定する円弧形状部材とを備えることにより、アクチュエータ動作による制御信号の伝導線の変形を設計時に制御でき、断線等の不具合を防止できるロボット装置である。また、このロボット装置は、内部状態に応じて自律動作するロボット装置である。
【0016】
このロボット装置は、住環境その他の日常生活上の様々な場面における人的活動を支援する実用ロボットであり、内部状態(怒り、悲しみ、喜び、楽しみ等)に応じて行動できるほか、4足歩行の動物が行う基本的な動作を表出できるエンターテインメントロボットである。
【0017】
このロボット装置は、特に、頭部、胴体部、上肢部、下肢部等を有している。
各部の連結部分及び関節に相当する部位には、運動の自由度に応じた数のアクチュエータ及びポテンショメータが備えられており、制御部の制御によって目標とする動作を表出できる。
【0018】
さらに、ロボット装置は、周囲の状況を画像データとして取得するための撮像部や、外部から受ける作用を検出するための各種センサや、外部から受ける物理的な働きかけ等を検出するための各種スイッチ等を備えている。撮像部には、小型のCCD(Charge-Coupled Device)カメラを使用する。センサには、角速度を検出する角速度センサ、CCDカメラによって撮像された対象物までの距離を計測する距離センサ等がある。各種スイッチには、主としてユーザによる接触を検出する押下式スイッチ、ユーザからの操作入力が可能な操作スイッチ等がある。これら各種センサ及び各種スイッチは、ロボット装置外部又は内部の適切な箇所に設置されている。
【0019】
以下、本発明の具体例として示すロボット装置について、図面を参照して説明する。
【0020】
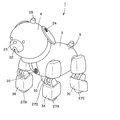
本実施の形態では、ロボット装置1は、図1に示すように、胴体部ユニット2の前後左右に脚部ユニット3A、3B、3C、3Dが連結され、胴体部ユニット2の前端部に頭部ユニット4が連結されて構成されている。また、胴体部ユニット2の後端部には、尻尾部5が設けられている。
【0021】
胴体部ユニット2には、図2に示すように、CPU(Central Processing Unit)10、DRAM(Dynamic Random Access Memory)11、フラッシュROM(Read Only Memory)12、PC(Personal Computer)カードインターフェイス回路13及び信号処理回路14が内部バス15を介して相互に接続されることにより形成されたコントロール部16と、このロボット装置1の動力源としてのバッテリ17とが収納されている。また、胴体部ユニット2には、ロボット装置1の向きや動きの加速度を検出するための角速度センサ18及び加速度センサ19が収納されている。また、胴体部ユニット2には、鳴き声等の音声又はメロディを出力するためのスピーカ20が設けられている。
【0022】
また、胴体部ユニット2の尻尾部5には、外部(ユーザ)からの入力を検出する機能として、操作スイッチ21が設けられている。本具体例では、例えば「誉める」、「叱る」等に対応する操作入力が予め決めらており、ユーザは、この操作スイッチ21を介して、これらを入力できるようになっている。
【0023】
頭部ユニット4には、外部の状況や対象物の色、形、動き等を撮像するためのCCD(Charge Coupled Device)カメラ22と、前方に位置する対象物までの距離を測定するための距離センサ23と、外部音を集音するためのマイク24と、例えばLED(Light Emitting Diode)を備えた発光部25等が、図1に示すように所定位置にそれぞれ配置されている。ただし、発光部25は、構成の説明等においては、必要に応じてLED25と示す。
【0024】
また、頭部ユニット4内部には、図1には図示しないが、ユーザの頭部ユニット4に対する接触を間接的に検出するための検出機構として頭部スイッチ26が備えられている。頭部スイッチ26は、例えば、ユーザの接触によって頭部が動かされた場合、その傾き方向を検出できるスイッチであって、ロボット装置1は、頭部スイッチ26によって検出される頭部の傾き方向に応じて、「誉められた」か「叱られた」かを認識している。
【0025】
各脚部ユニット3A〜3Dの関節部分、各脚部ユニット3A〜3Dと胴体部ユニット2との連結部分、頭部ユニット4と胴体部ユニット2との連結部分には、自由度数分のアクチュエータ281〜28n及びポテンショメータ291〜29nがそれぞれ配設されている。アクチュエータ281〜28nは、例えば、サーボモータを備えている。サーボモータの駆動により、脚部ユニット3A〜3Dが制御されて目標の姿勢、或いは動作に遷移する。各脚部ユニット3A〜3Dの先端の「肉球」に相当する位置には、主としてユーザからの接触を検出する検出機構としての肉球スイッチ27A〜27Dが設けられ、ユーザによる接触等を検出できるようになっている。
【0026】
ロボット装置1は、このほかにも、ここでは図示しないが、該ロボット装置1の内部状態とは別の動作状態(動作モード)を表すための発光部や、充電中、起動中、起動停止等、内部電源の状態を表す状態ランプ等を、適切な箇所に適宜備えていてもよい。
【0027】
ロボット装置1において、操作スイッチ21、頭部スイッチ26、肉球スイッチ27等の各種スイッチ、角速度センサ18、加速度センサ19、距離センサ23等の各種センサ、スピーカ20、マイク24、発光部25、各アクチュエータ281〜28n、各ポテンショメータ291〜29nは、それぞれ対応するハブ301〜30nを介してコントロール部16の信号処理回路14と接続されている。一方、CCDカメラ22及びバッテリ17は、それぞれ信号処理回路14と直接接続されている。
【0028】
信号処理回路14は、上述の各種スイッチから供給されるスイッチデータ、各種センサから供給されるセンサデータ、画像データ及び音声データを順次取り込み、これらをそれぞれ内部バス15を介してDRAM11内の所定位置に順次格納する。また信号処理回路14は、これらデータとともにバッテリ17から供給されるバッテリ残量を表すバッテリ残量データを順次取り込み、DRAM11内の所定位置に格納する。
【0029】
このようにしてDRAM11に格納された各スイッチデータ、各センサデータ、画像データ、音声データ及びバッテリ残量データは、CPU10が当該ロボット装置1の動作制御を行う際に使用される。
【0030】
CPU10は、ロボット装置1の電源が投入された初期時において、フラッシュROM12に格納された制御プログラムを読み出して、DRAM11に格納する。又は、CPU10は、図1に図示しない胴体部ユニット2のPCカードスロットに装着された半導体メモリ装置、例えば、メモリカード31に格納された制御プログラムをPCカードインターフェイス回路13を介して読み出してDRAM11に格納する。
【0031】
CPU10は、上述のように信号処理回路14よりDRAM11に順次格納される各センサデータ、画像データ、音声データ、及びバッテリ残量データに基づいて自己及び周囲の状況や、ユーザからの指示及び働きかけの有無を判断している。
【0032】
さらに、CPU10は、この判断結果とDRAM11に格納した制御プログラムとに基づく行動を決定する。CPU10は、当該決定結果に基づいてアクチュエータ281〜28nの中から必要とするアクチュエータを駆動することによって、例えば頭部ユニット4を上下左右に振らせたり、各脚部ユニット3A乃至3Dを駆動して歩行させたりする。また、CPU10は、必要に応じて音声データを生成し、信号処理回路14を介してスピーカ20に供給する。また、CPU10は、上述の発光部25におけるLEDの点灯及び消灯を指示する信号を生成し、LEDを点灯したり消灯したりする。
【0033】
このように、ロボット装置1は、自己及び周囲の状況や、ユーザからの指示及び働きかけに応じて自律的に行動するロボット装置である。
【0034】
続いて以下に、本発明の第1の具体例として示すロボット装置1の各脚部アクチュエータの構成を詳細に説明する。図3に、脚部ユニット3の内部の主要な構成を示す。
【0035】
脚部アクチュエータ構造100には、ロボット装置1の肩部分を駆動するアクチュエータと、肘部分を駆動するアクチュエータとが含まれる。胴体部ユニット2に設けられた回路基板101から各駆動部分に対する信号及び駆動のための電力をフレキシブルプリント回路基板(以下、FPCと記す)によって伝達している。
【0036】
回路基板101から導出されるFPCには、肩部及び肘部分を駆動するアクチュエータに対する信号及び電力が含まれるため、ここでは、肩肘部モータ用FPC102と表す。肩肘部モータ用FPC102は、一端が胴体部ユニット2部に格納される回路基板に接続され、後述する肩部及び肘部モータに延長されている。回路基板101から延長された肩肘部モータ用FPC102は、胸部出力軸103の周囲を周回した後、肩部ヒンジ104内に設けられたスリット105を通過し、肩部ヒンジ104内の肩部回動時に肩肘部モータ用FPC102が湾曲する空間を確保するためのFPC湾曲領域106内を周回している。
【0037】
肩肘部モータ用FPC102は、FPC湾曲領域106内を周回した後、ここでは図示しないが、肩部構造材に搭載された肩部回路基板108に接続コネクタ107aを介して接続されている。
【0038】
肩部回路基板108は、肩部モータ109及び肩部回動角度検出器110に接続されている。
【0039】
肩肘部モータ用FPC102は、ここでは図示されていないが、後述するFPCホルダ124に保持されているため、胸部出力軸103によって脚部全体が回動運動する際には、胸部出力軸103の周囲の空間で締まり及び緩みの動作をする。すなわち、胸部出力軸103に巻回された肩肘部モータ用FPC102は、肩部の回動運動に伴って、その湾曲度合い(曲率)が小さくなったり大きくなったり変化する。
【0040】
肩部回路基板108からは、接続コネクタ107bを介して肘部モータ用FPC111が導出されている。肘部モータ用FPC111は、肩部回路基板108と接続され、肘部ヒンジ111内のスリット112を通過し、肘部ヒンジ111内の肘部が回動する際に肩部モータ用FPC111が湾曲するための空間を確保するFPC湾曲領域113内を周回した後、図示しない肘部構造材に搭載された肘部回路基板114に接続されている。また、肘部回路基板114は、肘部モータ115及び肘部回動角度検出器116と接続されている。
【0041】
次に、肩部ヒンジ104内の回動時のFPC湾曲領域106における肩肘部モータ用FPC102の様子を図4、図5及び図6を用いて説明する。
【0042】
肩部ヒンジ104内のスリット105を通過した肩肘部モータ用FPC104は、肩部ヒンジ軸118の周りを周回した後、肩部構造材119に設けられたスリット120を紙面裏から表方向に通過して、肩部回路基板108に接続されている。ここでは、FPC肩部ヒンジ軸118には、円弧形状部材121が設けられている。
【0043】
図5(a)は、ロボット装置1の脚部ユニット3を胴体部ユニット2に対して内側方向に回動した場合の肩肘部モータ用FPC102の形状を表し、
図5(b)は、脚部ユニット3を胴体部ユニット2に対して外側方向に回動した場合の肩肘部モータ用FPC102の形状を表している。
【0044】
脚部ユニット3が胴体部ユニット2に対して、内側方向に回動した場合、図5(a)に示すように、肩肘部モータ用FPC102は、スリット105によってずれが制限されているため、脚部ユニット3の回動動作に伴って、ロボット装置の肩部ヒンジ軸118を締め付けることになる。このとき、円弧形状部材121は、その湾曲部の曲率半径が、FPCの折れ曲がりによる破損に耐えうる最小の曲率半径以下にならないよう変形形状を規定することができる。
【0045】
したがって、FPCの折れ曲がりによる破損を防止できる構造を設けることにより、ロボット装置1の信号及び電力供給にFPCを用いることができる。
【0046】
また、軽量で適度な可撓性を有するFPCを用いることによって、伝導線の変形が設計時に制御できる。そのため、動作中に断線等の不具合が発生することが防止されるとともにFPCの動きのコントロールが可能となり、電線を用いた場合と比べて耐久性が増し、電線を構造体に対して位置決めするような部品も大幅に減らすことが可能となる。
【0047】
続いて、2枚のFPCを重ねる場合について、図6(a)及び図6(b)に示す。図6(a)及び図6(b)は、肩部ヒンジ104とその中を通過する肩肘部モータ用FPC102を示している。両図は、互いに眺めている角度が異なっている。
【0048】
フレキシブルプリント回路基板は、設計上の自由度を増すために図中のW寸法、すなわち幅寸法を小さくする必要がある。しかし、一方、肩部及び肘部のアクチュエータを制御するには、ある程度制限された幅寸法のFPCでは、間に合わない場合がある。そのため、所定幅のFPCを複数枚重ね合わせて信号を導通する必要がある。そこで、図6(a)及び図6(b)に示すように、ロボット装置1に、複数枚のFPCを重ね合わせて固定するFPCホルダ124を適用する。FPCホルダ124は、胴体部ユニット2の外筐体に固定されている。
【0049】
以下では、2枚のFPCを用いる場合について説明する。肩肘部モータ用FPC102は、具体的に肩部モータ用FPC102aと肘部モータ用FPC102bとを含むがここでは、FPC102a、FPC102bと表記する。
【0050】
ロボット装置1に用いられるFPCの展開図を図7に示す。通常、本発明の具体例として示すロボット装置1の肩部分の配線をFPCで行うことを考慮すると、FPCは、図7(a)に示すように、略コ字形状として形成する必要がある。しかし、この形状のFPCを量産することは、FPCの取り数が減少するため、非効率的であり、製造にかかるコストが高騰する。
【0051】
そのため、FPCを図7(b)に示すような略L字形状とし、図7(c)のように湾曲部125によって湾曲させることで、図7(a)に示す略コ字形状FPCと同様の機能を有するFPCを得る。
【0052】
予め複雑な略コ字形状に成形する場合と異なり、略L字形状の一部を湾曲させて使用することで、安価に製作することができる。しかし、この湾曲作業を重ねられたFPCに施すと、図8に示すように、湾曲部125において、FPCがずれるため、湾曲部分においてFPCの湾曲形状に不具合が生じる場合がある。図9は、肩部分が図4に示した状態になっている場合、すなわち関節の全可動範囲の中間にある場合のFPCの湾曲形状を示している。また、図10(a)及び図10(b)は、肩部分が図5(a)に示した状態、すなわち肩関節が内側に回動する場合を示している。図10(a)は、内側のFPCが設計値より短く、図10(b)は、内側のFPCが設計値より長い場合を示している。図10(b)のように内側のFPCが長くなると、回動の際に、行き場を失ったFPCが予期しない形状に変形し、FPCの破壊許容曲率半径以下になる場合が生じる。
【0053】
そこで、2つのFPC102a及びFPC102bを湾曲部において内側に位置するFPCの曲率半径が外側に位置するFPCの曲率半径を超えないように、FPCホルダ124によって位置決めする。そのために、FPC102a、102bに、位置決めのため及びFPC102a、102bが後述するFPCホルダ124から抜け出すのを防止するための係合箇所を設ける。
【0054】
図11を用いて、FPCホルダ124の形状を説明する。FPCホルダ124は、各FPCとの係合部として、FPCホルダ124は、FPC102a、102bと略同長の幅寸法を有し、FPCを挟持するように一対の係合凹部126aと一対の係合凹部126bとを有した把持部を備えている。
【0055】
また、FPC102aは、FPCホルダ124と係合するためのホルダ係合部127に、係合FPCホルダ124の係合凹部126aと係合するための係合凸部128bを備え、FPC102bは、FPCホルダ124の係合凹部126bと係合するための係合凸部128aを備えている。
【0056】
FPC102aのホルダ係合部127に設けられた係合凸部128bは、FPC102aを図中矢印方向にスライドすることによって、FPCホルダ124に設けられた係合凹部126aと係合する。
【0057】
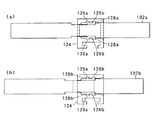
図12に、重ねられたFPC102a、102bとFPCホルダ124とFPCとの係合状態を示す。具体的に、図12(a)は、FPC102aを係合凸部128aと係合凹部126bとを係合することでFPCホルダ124に固定した場合を示し、図12(b)は、FPC102bを係合凸部128bと係合凹部126aとを係合することでFPCホルダ124に固定した場合を示す。これらFPC102aとFPC102bとを組み合わせて固定した様子を図13(a)及び図13(b)に示す。
【0058】
この構造により、円弧状に曲げられる2枚のFPCの内側の長さを外側より短くすることができ、FPCが耐え得る許容曲げ半径より小さく座屈することによる破損を防ぐことができる。
【0059】
ところで、本実施の形態として示すロボット装置1は、内部状態に応じて自律的に行動できるロボット装置である。ロボット装置1を制御する制御プログラムのソフトウェア構成の一例は、図14に示すようになる。この制御プログラムは、上述したように、予めフラッシュROM12に格納されており、ロボット装置1の電源投入初期時において読み出される。
【0060】
図14において、デバイス・ドライバ・レイヤ200は、制御プログラムの最下位層に位置し、複数のデバイス・ドライバからなるデバイス・ドライバ・セット201から構成されている。この場合、各デバイス・ドライバは、CCDカメラ22(図2)やタイマ等の通常のコンピュータで用いられるハードウェアに直接アクセスすることを許されたオブジェクトであり、対応するハードウェアからの割り込みを受けて処理を行う。
【0061】
また、ロボティック・サーバ・オブジェクト202は、デバイス・ドライバ・レイヤ200の最下位層に位置し、例えば上述の各種センサやアクチュエータ281〜28n等のハードウェアにアクセスするためのインターフェイスを提供するソフトウェア群でなるバーチャル・ロボット203と、電源の切換えなどを管理するソフトウェア群でなるパワーマネージャ204と、他の種々のデバイス・ドライバを管理するソフトウェア群でなるデバイス・ドライバ・マネージャ205と、ロボット装置1の機構を管理するソフトウェア群でなるデザインド・ロボット206とから構成されている。
【0062】
マネージャ・オブジェクト207は、オブジェクト・マネージャ208及びサービス・マネージャ209から構成されている。オブジェクト・マネージャ208は、ロボティック・サーバ・オブジェクト202、ミドル・ウェア・レイヤ210、及びアプリケーション・レイヤ211に含まれる各ソフトウェア群の起動や終了を管理するソフトウェア群であり、サービス・マネージャ209は、メモリカード31(図2)に格納されたコネクションファイルに記述されている各オブジェクト間の接続情報に基づいて各オブジェクトの接続を管理するソフトウェア群である。
【0063】
ミドル・ウェア・レイヤ210は、ロボティック・サーバ・オブジェクト202の上位層に位置し、画像処理や音声処理などのこのロボット装置1の基本的な機能を提供するソフトウェア群から構成されている。また、アプリケーション・レイヤ211は、ミドル・ウェア・レイヤ210の上位層に位置し、当該ミドル・ウェア・レイヤ210を構成する各ソフトウェア群によって処理された処理結果に基づいてロボット装置1の行動を決定するためのソフトウェア群から構成されている。
【0064】
なお、ミドル・ウェア・レイヤ210及びアプリケーション・レイヤ211の具体的なソフトウェア構成をそれぞれ図15に示す。
【0065】
ミドル・ウェア・レイヤ210は、図15に示すように、騒音検出用、温度検出用、明るさ検出用、音階認識用、距離検出用、姿勢検出用、接触検出用、操作入力検出用、動き検出用及び色認識用の各信号処理モジュール220〜229並びに入力セマンティクスコンバータモジュール230などを有する認識系250と、出力セマンティクスコンバータモジュール247並びに姿勢管理用、トラッキング用、モーション再生用、歩行用、転倒復帰用、LED点灯用及び音再生用の各信号処理モジュール240〜246等を有する出力系251とから構成されている。
【0066】
認識系250の各信号処理モジュール220〜229は、ロボティック・サーバ・オブジェクト202のバーチャル・ロボット203によりDRAM11(図2)から読み出される各スイッチデータ、各センサデータ、画像データ及び音声データのうちの対応するデータを取り込み、当該データに基づいて所定の処理を施して、処理結果を入力セマンティクスコンバータモジュール230に与える。ここで、例えば、バーチャル・ロボット203は、所定の通信規約によって、信号の授受或いは変換をする部分として構成されている。
【0067】
入力セマンティクスコンバータモジュール230は、これら各信号処理モジュール220〜228から与えられる処理結果に基づいて、「うるさい」、「暑い」、「明るい」、「ドミソの音階が聞こえた」、「障害物を検出した」、「転倒を検出した」、「叱られた」、「誉められた」、「動く物体を検出した」又は「ボールを検出した」等の自己及び周囲の状況や、ユーザからの指令及び働きかけを認識し、認識結果をアプリケーション・レイヤ211に出力する。
【0068】
アプリケーション・レイヤ211は、図16に示すように、行動モデルライブラリ260、行動切換モジュール261、学習モジュール262、感情モデル263及び本能モデル264の5つのモジュールから構成されている。
【0069】
行動モデルライブラリ260には、図17に示すように、「バッテリ残量が少なくなった場合」、「転倒復帰する場合」、「障害物を回避する場合」、「感情を表現する場合」、「ボールを検出した場合」などの予め選択されたいくつかの条件項目にそれぞれ対応させて、それぞれ独立した行動モデルが設けられている。
【0070】
そして、これら行動モデルは、それぞれ入力セマンティクスコンバータモジュール230から認識結果が与えられたときや、最後の認識結果が与えられてから一定時間が経過したときなどに、必要に応じて後述のように感情モデル263に保持されている対応する情動のパラメータ値や、本能モデル264に保持されている対応する欲求のパラメータ値を参照しながら続く行動をそれぞれ決定し、決定結果を行動切換モジュール261に出力する。
【0071】
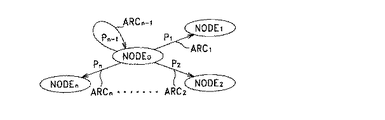
なお、本具体例として示すロボット装置1の場合、各行動モデルは、次の行動を決定する手法として、図18に示すような1つのノード(状態)NODE0〜NODEnから他のどのノードNODE0〜NODEnに遷移するかを有限確率オートマトンと呼ばれるアルゴリズムを用いて次の行動を決定している。有限確率オートマトンとは、ノードNODE0〜NODEnのうちの1つのノードから他のどのノードに遷移するか否かを各ノードNODE0〜NODEnの間を接続するアークARC1〜ARCnー1に対してそれぞれ設定された遷移確率P1〜Pnに基づいて確率的に決定するアルゴリズムである。
【0072】
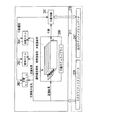
具体的に、各行動モデルは、それぞれ自己の行動モデルを形成するノードNODE0〜NODEnにそれぞれ対応させて、これらノードNODE0〜NODEn毎に図19に示すような状態遷移表270を有している。
【0073】
この状態遷移表270では、そのノードNODE0〜NODEnにおいて遷移条件とする入力イベント(認識結果)が「入力イベント名」の行に優先順に列記され、その遷移条件についてのさらなる条件が「データ名」及び「データ範囲」の行における対応する列に記述されている。
【0074】
したがって、図19の状態遷移表270で表されるノードNODE100では、「ボールを検出(BALL)」という認識結果が与えられた場合に、当該認識結果とともに与えられるそのボールの「大きさ(SIZE)」が「0から1000」の範囲であることや、「障害物を検出(OBSTACLE)」という認識結果が与えられた場合に、当該認識結果とともに与えられるその障害物までの「距離(DISTANCE)」が「0から100」の範囲であることが他のノードに遷移するための条件となっている。
【0075】
また、このノードNODE100では、認識結果の入力がない場合でも、行動モデルが周期的に参照する感情モデル263及び本能モデル264にそれぞれ保持された各情動及び各欲求のパラメータ値のうち、感情モデル263に保持された「喜び(Joy)」、「驚き(Surprise)」若しくは「悲しみ(Sadness)」のいずれかのパラメータ値が「50から100」の範囲であるときには他のノードに遷移することができるようになっている。
【0076】
また、状態遷移表270では、「他のノードヘの遷移確率」の欄における「遷移先ノード」の列にそのノードNODE0〜NODEnから遷移できるノード名が列記されているとともに、「入力イベント名」、「データ名」及び「データの範囲」の行に記述された全ての条件が揃ったときに遷移できるほかの各ノードNODE0〜NODEnへの遷移確率が「他のノードヘの遷移確率」の欄内の対応する箇所にそれぞれ記述され、そのノードNODE0〜NODEnに遷移する際に出力すべき行動が「他のノードヘの遷移確率」の欄における「出力行動」の行に記述されている。なお、「他のノードヘの遷移確率」の欄における各行の確率の和は100[%]となっている。
【0077】
したがって、図19の状態遷移表270で表されるノードNODE100では、例えば「ボールを検出(BALL)」し、そのボールの「SIZE(大きさ)」が「0から1000」の範囲であるという認識結果が与えられた場合には、「200[%]」の確率で「ノードNODE120(node 120)」に遷移でき、そのとき「ACTION1」の行動が出力されることとなる。
【0078】
各行動モデルは、それぞれこのような状態遷移表270として記述されたノードNODE0〜NODEnが幾つも繋がるようにして構成されており、入力セマンティクスコンバータモジュール230から認識結果が与えられたときなどに、対応するノードNODE0〜NODEnの状態遷移表を利用して確率的に次の行動を決定し、決定結果を行動切換モジュール261に出力するようになされている。
【0079】
図17に示す行動切換モジュール261は、行動モデルライブラリ260の各行動モデルからそれぞれ出力される行動のうち、予め定められた優先順位の高い行動モデルから出力された行動を選択し、当該行動を実行すべき旨のコマンド(以下、これを行動コマンドという。)をミドル・ウェア・レイヤ210の出力セマンティクスコンバータモジュール247に送出する。なお、この実施の形態においては、図19において下側に表記された行動モデルほど優先順位が高く設定されている。
【0080】
また、行動切換モジュール261は、行動完了後に出力セマンティクスコンバータモジュール247から与えられる行動完了情報に基づいて、その行動が完了したことを学習モジュール262、感情モデル263及び本能モデル264に通知する。
【0081】
学習モジュール262は、入力セマンティクスコンバータモジュール230から与えられる認識結果のうち、「叱られた」や「誉められた」等、ユーザからの働きかけとして受けた教示の認識結果を入力する。そして、学習モジュール262は、この認識結果及び行動切換モジュール261からの通知に基づいて、「叱られた」ときにはその行動の発現確率を低下させ、「誉められた」ときにはその行動の発現確率を上昇させるように、行動モデルライブラリ260における対応する行動モデルの対応する遷移確率を変更する。
【0082】
また、感情モデル263は、「喜び(Joy)」、「悲しみ(Sadness)」、「怒り(Anger)」、「驚き(Surprise)」、「嫌悪(Disgust)」及び「恐れ(Fear)」の合計6つの情動について、各情動毎にその情動の強さを表すパラメータを保持している。そして、感情モデル263は、これら各情動のパラメータ値を、それぞれ入力セマンティクスコンバータモジュール230から与えられる「叱られた」及び「誉められた」などの特定の認識結果と、経過時間及び行動切換モジュール261からの通知となどに基づいて周期的に更新する。
【0083】
具体的には、感情モデル263は、入力セマンティクスコンバータモジュール230から与えられる認識結果と、そのときのロボット装置1の行動と、前回更新してからの経過時間となどに基づいて所定の演算式により算出されるそのときのその情動の変動量を△E[t]、現在のその情動のパラメータ値をE[t]、その情動の感度を表す係数をkeとして、(1)式によって次の周期におけるその情動のパラメータ値E[t+1]を算出し、これを現在のその情動のパラメータ値E[t]と置き換えるようにしてその情動のパラメータ値を更新する。また、感情モデル263は、これと同様にして全ての情動のパラメータ値を更新する。
【0084】
【数1】

なお、各認識結果や出力セマンティクスコンバータモジュール247からの通知が各情動のパラメータ値の変動量△E[t]にどの程度の影響を与えるかは予め決められており、例えば「叱られた」といった認識結果は「怒り」の情動のパラメータ値の変動量△E[t]に大きな影響を与え、「誉められた」といった認識結果は「喜び」の情動のパラメータ値の変動量△E[t]に大きな影響を与えるようになっている。
【0086】
ここで、出力セマンティクスコンバータモジュール247からの通知とは、いわゆる行動のフィードバック情報(行動完了情報)であり、行動の出現結果の情報であり、感情モデル263は、このような情報によっても感情を変化させる。これは、例えば、「吠える」といった行動により怒りの感情レベルが下がるといったようなことである。なお、出力セマンティクスコンバータモジュール247からの通知は、上述した学習モジュール262にも入力されており、学習モジュール262は、その通知に基づいて行動モデルの対応する遷移確率を変更する。
【0087】
なお、行動結果のフィードバックは、行動切換モジュール261の出力(感情が付加された行動)によりなされるものであってもよい。
【0088】
また、本能モデル264は、「運動欲(exercise)」、「愛情欲(affection)」、「充電欲(以下、食欲(appetite)と記す。)」及び「好奇心(curiosity)」の互いに独立した4つの欲求について、これら欲求毎にその欲求の強さを表すパラメータを保持している。そして、本能モデル264は、これらの欲求のパラメータ値を、それぞれ入力セマンティクスコンバータモジュール230から与えられる認識結果や、経過時間及び行動切換モジュール261からの通知などに基づいて周期的に更新する。
【0089】
具体的には、本能モデル264は、「運動欲」、「愛情欲」及び「好奇心」については、認識結果、経過時間及び出力セマンティクスコンバータモジュール247からの通知などに基づいて所定の演算式により算出されるそのときのその欲求の変動量をΔI[k]、現在のその欲求のパラメータ値をI[k]、その欲求の感度を表す係数kiとして、所定周期で(2)式を用いて次の周期におけるその欲求のパラメータ値I[k+1]を算出し、この演算結果を現在のその欲求のパラメータ値I[k]と置き換えるようにしてその欲求のパラメータ値を更新する。また、本能モデル264は、これと同様にして「食欲」を除く各欲求のパラメータ値を更新する。
【0090】
【数2】
なお、認識結果及び出力セマンティクスコンバータモジュール247からの通知などが各欲求のパラメータ値の変動量△I[k]にどの程度の影響を与えるかは予め決められており、例えば出力セマンティクスコンバータモジュール247からの通知は、「疲れ」のパラメータ値の変動量△I[k]に大きな影響を与えるようになっている。
【0092】
なお、本実施の形態においては、各情動及び各欲求(本能)のパラメータ値がそれぞれ0から100までの範囲で変動するように規制されており、また係数ke、kiの値も各情動及び各欲求毎に個別に設定されている。
【0093】
ミドル・ウェア・レイヤ210の出力セマンティクスコンバータモジュール247は、図15に示すように、上述のようにしてアプリケーション・レイヤ211の行動切換モジュール261から与えられる「前進」、「喜ぶ」、「鳴く」又は「トラッキング(ボールを追いかける)」といった抽象的な行動コマンドを出力系251の対応する信号処理モジュール240〜246に与える。
【0094】
そしてこれら信号処理モジュール240〜246は、行動コマンドが与えられると当該行動コマンドに基づいて、その行動をするために対応するアクチュエータ281〜28n(図2)に与えるべきサーボ指令値や、スピーカ20(図2)から出力する音の音声データ及び/又は発光部25のLEDに与える駆動データを生成し、これらのデータをロボティック・サーバ・オブジェクト202のバーチャル・ロボット203及び信号処理回路14(図2)を介して対応するアクチュエータ281〜28n、スピーカ20、発光部25に順次送出する。
【0095】
このようにしてロボット装置1は、制御プログラムに基づいて自己(内部)及び周囲(外部)の状況や、ユーザからの指示及び働きかけに応じた自律的な行動ができる。
【0096】
また、上述したようなロボット装置1を制御する制御プログラムは、予めフラッシュROM12に格納されているものとして説明したが、ロボット装置が読取可能な形式で記録媒体に記録して提供してもよい。制御プログラムを記録する記録媒体としては、磁気読取方式の記録媒体(例えば、磁気テープ、磁気ディスク、磁気カード)、光学読取方式の記録媒体(例えば、CD−ROM、MO、CD−R、DVD)等が考えられる。記録媒体には、半導体メモリ((矩形型、正方形型等の形状は問わない。)、ICカード)等の記憶媒体も含まれる。また、制御プログラムは、いわゆるインターネット等の情報ネットワークを介して提供されてもよい。
【0097】
なお、本発明は、上述した実施の形態のみに限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能であることは勿論である。本実施の形態では、4足歩行の脚式移動ロボットに関して説明したが、ロボット装置は、内部状態に応じて動作するものであれば適用可能であって、移動手段は、4足歩行、さらには脚式移動方式に限定されない。
【0100】
【発明の効果】
上述した目的を達成するために、本発明に係るロボット装置は、本体部に対して可動する可動部を有し、該可動部を介して信号を伝達するロボット装置において、可動部と本体部との間で信号を伝達する複数の可撓性回路基板と、複数の可撓性回路基板を重ね合わせて固定する留め部材とを備えている。留め部材は、複数の可撓性回路基板を重ね合わせて円弧状に湾曲した際に、円弧の内側に位置する可撓性回路基板の曲率半径が外側に位置する可撓性回路基板の曲率半径よりも小となるように複数の可撓性回路基板を固定することにより、可撓性回路基板の折れ曲がりによる破損を防止し、動作中の断線等の不具合の発生が防止される。
【0101】
また、可撓性回路基板は重ね合わせて使用する際でも、折れ曲がりによる破損、また、該可撓性回路基板の耐久性を著しく低下させる形状に変形することを防止できる。
【図面の簡単な説明】
【図1】本発明の具体例として示すロボット装置の外観を示す外観図である。
【図2】本発明の具体例として示すロボット装置の構成を示す構成図である。
【図3】本発明の具体例として示すロボット装置の脚部アクチュエータ構成を示す斜視図である。
【図4】本発明の具体例として示すロボット装置の脚部アクチュエータにおける肩部分の正面図である。
【図5】本発明の具体例として示すロボット装置の脚部アクチュエータにおける肩部分の正面図である。
【図6】本発明の具体例として示すロボット装置の脚部アクチュエータにおける肩部分の外観を示す斜視図である。
【図7】本発明の具体例として示すロボット装置に適用するFPCの展開図である。
【図8】本発明の具体例として示すロボット装置に適用するFPCの展開図である。
【図9】本発明の具体例として示すロボット装置の脚部アクチュエータにおける肩部分の回動に伴って変形するFPCの様子を示す図である。
【図10】本発明の具体例として示すロボット装置の脚部アクチュエータにおける肩部分の回動に伴って変形するFPCの様子を示す図である。
【図11】本発明の具体例として示すロボット装置に適用されるFPC及びFPCホルダを説明する図である。
【図12】本発明の具体例として示すロボット装置に適用されるFPC及びFPCホルダを上面からみた平面図である。
【図13】(a)は、本発明の具体例として示すロボット装置に適用されるFPC及びFPCホルダを上面からみた平面図であり、(b)は、本発明の具体例として示すロボット装置に適用されるFPC及びFPCホルダの側面図である。
【図14】本発明の具体例として示すロボット装置の制御プログラムのソフトウェア構成を示す構成図である。
【図15】本発明の具体例として示すロボット装置の制御プログラムのうち、ミドル・ウェア・レイヤの構成を示す構成図である。
【図16】本発明の具体例として示すロボット装置の制御プログラムのうち、アプリケーション・レイヤの構成を示す構成図である。
【図17】本発明の具体例として示すロボット装置の制御プログラムのうち、行動モデルライブラリの構成を示す構成図である。
【図18】本発明の具体例として示すロボット装置の行動を決定するためのアルゴリズムである有限確率オートマトンを説明する模式図である。
【図19】本発明の具体例として示すロボット装置の行動を決定するための状態遷移条件を表す図である。
【図20】従来のロボット装置のアクチュエータ構造の概略を説明した斜視図である。
【符号の説明】
1 ロボット装置、2 胴体部ユニット、3A,3B,3C,3D 脚部ユニット、4 頭部ユニット、5 尻尾部、10 CPU、11 DRAM、12 フラッシュROM、13 PCカードインターフェイス回路、14 信号処理回路、15 内部バス、16 コントロール部、17 バッテリ、18 角速度センサ、19 加速度センサ、20 スピーカ、21 操作スイッチ、22 CCDカメラ、23 距離センサ、24 マイク、25、発光部、26 頭部スイッチ、27 肉球スイッチ、281〜28n アクチュエータ、291〜29n ポテンショメータ、301〜30n ハブ、31 メモリカード、100 脚部アクチュエータ構造、101 回路基板、102 肩肘部モータ用FPC、103 胸部出力軸、104 肩部ヒンジ、105 スリット、106 FPC湾曲領域、107a、107b 接続コネクタ、108 肩部回路基板、109 肩部モータ、110 肩部回動角度検出器、111 肘部モータ用FPC、112スリット、113 FPC湾曲領域、114 肘部回路基板、115 肘部モータ、116 肘部回動角度検出器、118 肩部ヒンジ軸、119 肩部構造材、120 スリット、121 円弧形状部材、122 回動軸、123 回動軸、124、FPCホルダ、125 湾曲部、126a、126b 係合凹部、127 ホルダ係合部、128 係合凸部
Claims (4)
- 本体部に対して可動する可動部を有し、該可動部を介して信号を伝達するロボット装置において、
上記可動部と上記本体部との間で信号を伝達する複数の可撓性回路基板と、
上記複数の可撓性回路基板を重ね合わせて固定する留め部材と
を備え、
上記複数の可撓性回路基板は、片端が位置決めされ、円弧状に湾曲され、位置決め及び抜け止め用係合部を備え、
上記留め部材は、被係合部を備え、上記複数の可撓性回路基板を重ね合わせて円弧状に湾曲した際に、上記位置決め及び抜け止め用係合部と上記被係合部とが係合することにより、上記円弧の内側に位置する可撓性回路基板の曲率半径が外側に位置する可撓性回路基板の曲率半径よりも小となるように固定する
ロボット装置。 - 上記可撓性回路基板は、矩形薄板形状を呈する請求項1記載のロボット装置。
- 上記可動部は、駆動手段を備え、
上記可撓性回路基板は、上記駆動手段に対して電力を供給する請求項1又は2記載のロボット装置。 - 上記位置決め及び抜け止め用係合部は、凸形状であり、上記被係合部は、凹形状である請求項1記載のロボット装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001268129A JP4635398B2 (ja) | 2001-09-04 | 2001-09-04 | ロボット装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001268129A JP4635398B2 (ja) | 2001-09-04 | 2001-09-04 | ロボット装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003071773A JP2003071773A (ja) | 2003-03-12 |
| JP4635398B2 true JP4635398B2 (ja) | 2011-02-23 |
Family
ID=19094157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001268129A Expired - Fee Related JP4635398B2 (ja) | 2001-09-04 | 2001-09-04 | ロボット装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635398B2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100794786B1 (ko) | 2003-05-02 | 2008-01-21 | 삼성전자주식회사 | 신호전달유닛과 힌지장치 및 영상 촬영장치 |
| JP4557153B2 (ja) * | 2004-12-02 | 2010-10-06 | トヨタ自動車株式会社 | リンク機構のケーブル配索方法及びリンク機構のケーブル配索構造 |
| JP4921087B2 (ja) * | 2006-09-08 | 2012-04-18 | キヤノン株式会社 | フレキシブル基板の固定装置 |
| JP5445664B2 (ja) * | 2009-03-17 | 2014-03-19 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5136480B2 (ja) * | 2009-03-17 | 2013-02-06 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5195551B2 (ja) * | 2009-03-17 | 2013-05-08 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5136479B2 (ja) * | 2009-03-17 | 2013-02-06 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5195778B2 (ja) * | 2009-03-17 | 2013-05-15 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5402748B2 (ja) * | 2010-03-18 | 2014-01-29 | 株式会社デンソーウェーブ | 産業用ロボットの回転関節用配線装置 |
| JP5402755B2 (ja) * | 2010-03-19 | 2014-01-29 | 株式会社デンソーウェーブ | ロボットの回転関節用配線装置 |
| JP5527115B2 (ja) * | 2010-08-31 | 2014-06-18 | 株式会社デンソーウェーブ | 産業用ロボットの回転関節用配線装置 |
| JP2015085453A (ja) * | 2013-10-31 | 2015-05-07 | セイコーエプソン株式会社 | ロボット |
| JP2015085454A (ja) * | 2013-10-31 | 2015-05-07 | セイコーエプソン株式会社 | ロボット |
| US10050359B2 (en) | 2013-10-31 | 2018-08-14 | Seiko Epson Corporation | Robot |
| EP3074190B8 (en) | 2013-11-28 | 2022-05-18 | ABB Schweiz AG | A rotary joint of a robot and the robot including the same |
| FR3024384A1 (fr) * | 2014-07-30 | 2016-02-05 | Aldebaran Robotics | Amelioration de l'assemblage d'un robot a caractere humanoide |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6114886A (ja) * | 1984-06-27 | 1986-01-23 | 株式会社東芝 | 関節装置 |
| JPS62122427U (ja) * | 1986-01-23 | 1987-08-04 | ||
| JPS63318285A (ja) * | 1987-06-16 | 1988-12-27 | 三菱電機株式会社 | 関節部の配線装置 |
| US4874908A (en) * | 1987-07-08 | 1989-10-17 | Minnesota Mining And Manufacturing Company | Wiring harness |
| JPH04206314A (ja) * | 1990-11-30 | 1992-07-28 | Yazaki Corp | 折曲部を有するワイヤハーネスの製造方法及びその製造方法により製造された折曲部を有するワイヤハーネス |
| JP2596349Y2 (ja) * | 1992-12-08 | 1999-06-14 | 三菱電線工業株式会社 | フラットケーブルの結束部 |
| JPH0683294U (ja) * | 1993-05-14 | 1994-11-29 | キヤノン株式会社 | ロボット |
| JPH07107650A (ja) * | 1993-09-30 | 1995-04-21 | Toyota Motor Corp | 旋回動作部へのケーブル・ホース類の取付け構造 |
| JPH09123083A (ja) * | 1995-10-31 | 1997-05-13 | Denso Corp | ロボットハンド装置 |
-
2001
- 2001-09-04 JP JP2001268129A patent/JP4635398B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003071773A (ja) | 2003-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635398B2 (ja) | ロボット装置 | |
| JP4032793B2 (ja) | 充電システム及び充電制御方法、ロボット装置、及び充電制御プログラム及び記録媒体 | |
| JP3714268B2 (ja) | ロボット装置 | |
| US6697711B2 (en) | Operational control method, program, and recording media for robot device, and robot device | |
| JP4609584B2 (ja) | ロボット装置、顔認識方法及び顔認識装置 | |
| US7062356B2 (en) | Robot apparatus, control method for robot apparatus, and toy for robot apparatus | |
| EP1151779A2 (en) | Robot and action deciding method for robot | |
| Han et al. | Dav: A humanoid robot platform for autonomous mental development | |
| JP2003159674A (ja) | ロボット装置、ロボット装置の外力検出方法及びロボット装置の外力検出プログラム、並びにロボット装置の外力検出のためのキャリブレーション方法及びロボット装置の外力検出のためのキャリブレーションプログラム | |
| US11833441B2 (en) | Robot | |
| JP2004298975A (ja) | ロボット装置、障害物探索方法 | |
| JP2002059384A (ja) | ロボットのための学習システム及び学習方法 | |
| JP2003071775A (ja) | ロボット装置 | |
| JP2004130427A (ja) | ロボット装置及びロボット装置の動作制御方法 | |
| JP4649806B2 (ja) | ロボット装置及びロボット装置の衝撃吸収方法 | |
| JP2003136456A (ja) | ロボット装置、ロボット装置の明るさ検出方法、明るさ検出プログラム及び記録媒体 | |
| JP2002239952A (ja) | ロボット装置、ロボット装置の行動制御方法、プログラム及び記録媒体 | |
| JP2003271958A (ja) | 画像処理方法、その装置、そのプログラム、その記録媒体及び画像処理装置搭載型ロボット装置 | |
| JP2002205289A (ja) | ロボット装置の動作制御方法、プログラム、記録媒体及びロボット装置 | |
| JP2003071756A (ja) | ロボット装置 | |
| JP4296702B2 (ja) | 動作表出装置及び玩具 | |
| JP4379052B2 (ja) | 動体検出装置、動体検出方法、及びロボット装置 | |
| JP2001157980A (ja) | ロボット装置及びその制御方法 | |
| JP2003071757A (ja) | ロボット装置 | |
| JP2001154707A (ja) | ロボット装置及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080819 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100817 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101008 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |