JP4635368B2 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- JP4635368B2 JP4635368B2 JP2001121253A JP2001121253A JP4635368B2 JP 4635368 B2 JP4635368 B2 JP 4635368B2 JP 2001121253 A JP2001121253 A JP 2001121253A JP 2001121253 A JP2001121253 A JP 2001121253A JP 4635368 B2 JP4635368 B2 JP 4635368B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- vehicle
- speed
- crawler
- semi
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Arrangement And Driving Of Transmission Devices (AREA)
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
Description
【発明の属する技術分野】
本発明は作業車両に関するものであり、特に、後車軸にホイール型後輪またはセミクローラ型走行装置を選択的に装着可能な作業車両に関するものである。
【0002】
【従来の技術及び発明が解決しようとする課題】
従来、前車軸にホイール型前輪を装着し、後車軸にはホイール型後輪、若しくは、駆動スプロケットと従動スプロケット間にクローラを卷装したセミクローラ型走行装置を選択的に装着可能にした作業車両が知られている。ホイール型に設定した作業車両をセミクローラ型に変更する場合は、ホイールと駆動スプロケットの直径が異なることからホイール型後輪の周速度に対してクローラの周速度が変更され、このクローラの周速度に前輪の回転数を合わせる必要がある。
【0003】
しかし、従来の作業車両は、スペースが狭いので減速機構の取り付けが困難であった。或いは、ホイールベースを長くして減速機構を追加装備していた。従って、ホイール型とセミクローラ型との組み換え作業性が悪く、セミクローラ型での走行性が低下することもあった。
【0004】
そこで、後車軸にホイール型後輪若しくはセミクローラ型走行装置を選択的に装着可能な作業車両に於いて、ホイール型とセミクローラ型との組み換え作業性を容易にするとともに、セミクローラ型での走行性を向上するために解決すべき技術的課題が生じてくるのであり、本発明はこの課題を解決することを目的とする。
【0005】
【課題を解決するための手段】
本発明は上記目的を達成するために提案されたものであり、請求項1記載の発明は、前車軸(12)にはホイール型前輪(13)を装着し、後車軸(15)に、ホイール型後輪(16)、若しくは、駆動スプロケット(21)と従動スプロケット(23)間にクローラ24を巻装したセミクローラ型走行装置(20)を選択的に装着可能な作業車両であって、前記作業車両には、変速操作に伴い動力伝達を入り切りするクラッチ(34)を備え、動力伝達経路には、ホイール型後輪(16)若しくはセミクローラ型走行装置(20)を装着したときに、ミッションケース(14b)内に、前記前輪(13)の回転数を合わせる回転数切り換え部(40)と、この回転数切り換え部(40)よりも動力上手側のギヤの回転数を検出する車速検出部(41)とを備えるとともに、この車速検出部(41)の検出回転に基づいて車速を演算し、且つ、前記ホイール型後輪(16)若しくはセミクローラ型走行装置(20)の装着状態に応じて、前記クラッチ(34)の作動特性を変更する制御部(50)を備えた作業車両に於いて、
上記ホイール型後輪(16)とセミクローラ型走行装置(20)とで変速装置の湿式多板クラッチの作動特性の変更にあたり、
モード切り換え部(42)の設定により、
ホイールモード設定時には、車体発進時にクラッチ接続圧を比較的急速に上昇させ早い時間で昇圧を完了させ、
セミクローラモード設定時には、車体発進時にクラッチ接続圧を比較的緩慢に上昇させホイールモードよりも長い時間で昇圧を完了させるように、
制御させる作業車両、
及び、請求項2記載の発明は、上記モード切り換え部(42)の設定により、
上記ホイールモード設定時には、上記回転数切り換え部(40)のシフタが後方へスライドして前輪伝達軸(37)が前後一体に直結され、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されることなく前車軸(12)方向に伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示し、且つ、上記セミクローラモード設定時には、上記回転数切り換え部(40)のシフタが前方へスライドして、前輪伝達軸(37)の回転が減速機構(40a)に伝わり、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されて前車軸(12)方向へ伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示する請求項1記載の作業車両を提供するものである。
【0006】
【発明の実施の形態】
以下、本発明の一実施の形態を図面に従って詳述する。図1は作業車両の一例としてホイール型トラクタ10aを示し、車体の前部にエンジン11を搭載し、その下方部に設けた前車軸12にホイール型前輪13,13を装着している。一方、ミッションケース14の後部に設けた後車軸15にホイール型後輪16,16を装着している。
【0007】
前記ミッションケース14の上方部に運転席17を設置し、該運転席17の前方部に操向操作部であるステアリングハンドル18を設けてある。また、ステアリングハンドル18の近傍には、表示部であるモニタパネル19が取り付けられている。前記エンジン11の回転動力は、ミッションケース14内の変速装置により変速された後に、後車軸部分の減速機構(図示せず)にて更に減速されて後車軸15に伝達され、後輪16が回転駆動される。
【0008】
図2は作業車両の他の一例としてセミクローラ型トラクタ10bを示し、前述したホイール型トラクタ10aと同一構成部分には同一符号を付してその説明を省略する。このセミクローラ型トラクタ10bは、ホイール型後輪に代えて、後車軸15にセミクローラ型走行装置20を装着してある。
【0009】
このセミクローラ型走行装置20は、後車軸15に取り付けた駆動スプロケット21と、後車軸15を中心に前後に揺動するクローラフレーム22と、クローラフレーム22に枢着した従動スプロケット23と、これらを取り巻くように巻装されたクローラ24とから構成されている。前記エンジン11の回転動力は、ミッションケース14内の変速装置により変速された後に、後車軸部分の減速機構(図示せず)にて更に減速されて後車軸15に伝達され、駆動スプロケット21が回転してクローラ24が駆動される。
【0010】
同図に示すように、ボンネット25とリヤフェンダ26との間に設けられている乗降部27には、ナイロン等の透明な可撓性シート28を装着してある。該可撓性シート28は、ボンネット25側に固設したフレーム29にその一端部を蝶着し、その他端部にフック30を取り付けてリヤフェンダ26に係止する。セミクローラ型トラクタ10bは、一般的に湿田等の泥濘地での作業が多いため、クローラ24の表面に設けられているラグが土泥を跳ね上げて、オペレータが土泥で汚損されることがある。
【0011】
そこで、乗降部27に前記可撓性シート28を装着することにより、クローラ24が跳ね上げる土泥を遮断することができる。該可撓性シート28は透明であるので、オペレータの視認性を妨げることはない。また、フック30の係止を外すことにより、該可撓性シート28はフレーム26の蝶着部を中心に外側へ開放することができ、オペレータの乗降に支障を与えることもない。
【0012】
図3はミッションケース14内の変速装置の構成を示し、該ミッションケース14はフロントミッションケース14aとミッドミッションケース14cの間にスペーサミッションケース14bを介装してあり、ミッドミッションケース14cの後部にリヤミッションケース14dが接続されている。前記フロントミッションケース14aには、湿式多板のメインクラッチ31とPTOクラッチ32が設けられ、スペーサミッションケース14bには、ハイロー切り換えクラッチ33と前後進クラッチ34が設けられている。エンジン11の回転動力はメインクラッチ31とPTOクラッチ32とに分岐され、メインクラッチ31により走行系動力を入り切りし、PTOクラッチ32によりPTO系動力を入り切りする。走行系動力はメインクラッチ31を経て、ハイロー切り換えクラッチ33にて高低何れかに変速され、前後進クラッチ34にて前進若しくは後進に切り換わる。
【0013】
また、ミッドミッションケース14cには、油圧アクチュエータ(図示せず)の駆動でシフト位置が切り換わるシンクロメッシュ式の主変速装置35と、手動切り換え式の副変速装置36とが設けられ、更に、前輪13への動力を伝達する前輪伝達軸37には、等速四駆と倍速四駆とを切り換える四駆切り換えクラッチ38を設けてある。前記主変速装置35及び副変速装置36にて変速された走行系動力は、リヤミッションケース14dに設けたリヤデファレンシャル装置39を経て左右の後車軸部分の減速機構(図示せず)に伝達され、更に減速されて後車軸15が駆動される。
【0014】
ホイール型トラクタ10aとセミクローラ型トラクタ10bとでは、ホイール型後輪16と駆動スプロケット21の直径が異なることから、ホイール型後輪16の周速度に対してクローラ24の周速度が変更される。このため、ホイール型とセミクローラ型とでは、後輪16若しくはクローラ24の周速度に応じて、前車軸12の回転速度を変更する必要がある。そこで、前記前輪伝達軸37にはスペーサミッションケース14bの下部位置に、回転切り換え部40として爪クラッチを設けておき、この回転切り換え部40のシフタを前後に移動することによって、前車軸12の回転速度を変更できるように構成してある。尚、41は車速検出部であり、前輪伝達軸37の回転数を読み取ってコントローラ50へ送り、該コントローラ50にてこの検出信号を後輪16またはクローラ24の周速度に換算して車体の走行速度を演算する。
【0015】
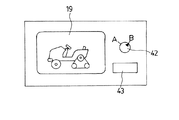
図4は前記モニタパネル19を示し、運転席17の近傍またはモニタパネル19の近傍に、ホイール型トラクタ10aとセミクローラ型トラクタ10bとを切り換えるモード切り換え部42を設置してある。図1に示したように、後車軸15にホイール型後輪の後輪16を装着した場合は、該モード切り換え部42をホイールモード(A)に設定し、図2に示したように、後車軸15にセミクローラ型走行装置20を装着した場合は、該モード切り換え部42をセミクローラモード(B)に設定する。
【0016】
該モード切り換え部42をホイールモード(A)に設定したときは、アクチュエータ(図示せず)の作動により、図3に示した前記回転切り換え部40のシフタが後方(図中右側)へスライドして前輪伝達軸37が前後一体に直結され、四駆切り換えクラッチ38から前方に出力される回転動力が減速されることなく前車軸12方向へ伝達される。このとき、モニタパネル19はホイール型トラクタ10aである旨を画像表示してオペレータに認識させるとともに、コントローラ50は前記車速センサ41の検出信号から後輪16の周速度を基準とする演算処理を行い、車体の走行速度を演算して車速表示部43に表示する。
【0017】
これに対して、該モード切り換え部42をセミクローラモード(B)に設定したときは、前記回転切り換え部40のシフタが、前方(図中左側)へスライドして前輪伝達軸37の回転が減速機構40aに伝わり、四駆切り換えクラッチ38から前方に出力される回転動力が減速されて前車軸12方向へ伝達される。このとき、モニタパネル19はセミクローラ型トラクタ10bである旨を画像表示してオペレータに認識させるとともに、コントローラ50は前記車速センサ41の検出信号からクローラ24の周速度を基準とする演算処理に変更し、車体の走行速度を演算して車速表示部43に表示する。
【0018】
このように、スペーサミッションケース14b内に回転切り換え部40を設け、該回転切り換え部40の切り換えによって前輪13の回転数を合わせるように構成したので、ホイール型とセミクローラ型との組み換え作業を極めて容易に行うことができる。また、前車軸部分に減速機構を装備するスペースがない場合でも、減速機構の取り付けが可能であり、ホイールベースが長くなることがないので、セミクローラ型での走行性が低下することはない。
【0019】
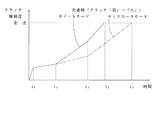
また、ホイール型とセミクローラ型とで変速装置の湿式多板クラッチの作動特性を変更する。例えば、前後進クラッチ34を制御する前後進コントロールバルブの昇圧特性を、図6に示すように、ホイールモードとセミクローラモードとで変更する。モード切り換え部42がホイールモード(A)に設定されているときは、同図の実線で示すように、車体の発進時にクラッチ接続圧を比較的急速に上昇させて、早い時間で昇圧を完了する。
【0020】
これに対して、モード切り換え部42がセミクローラモード(B)に設定されているときは、同図の一点鎖線で示すように、車体の発進時にクラッチ接続圧を比較的緩慢に上昇させて、ホイールモードよりも長い時間で昇圧を完了する。これは、発進時のみではなく変速時も同様であり、ホイールモードよりもセミクローラモードのほうが昇圧時間を長く取るように設定してある。
【0021】
図7及び図8は他の実施の形態を示し、リヤアクスルハウジング44内に設けた減速機構部により、出力回転数の異なる第1の後車軸15aと第2の後車軸15bとを前後にずらして選択的に取り付けられるように構成してある。図7は第1の後車軸15aにホイール型後輪16を取り付けたホイール型トラクタ10aを示し、図8は第2の後車軸15bにセミクローラ型走行装置20を取り付けたセミクローラ型トラクタ10bを示している。
【0022】
尚、本発明は、本発明の精神を逸脱しない限り種々の改変を為すことができ、そして、本発明が該改変されたものに及ぶことは当然である。
【0023】
【発明の効果】
本発明は上記一実施の形態に詳述したように、請求項1記載の発明は、作業車両には、変速操作に伴い動力伝達を入り切りするクラッチ(34)を備え、動力伝達経路には、ホイール型後輪(16)若しくはセミクローラ型走行装置(20)を装着したときに、前記前輪(13)の回転数を合わせる回転数切り換え部(40)と、この回転数切り換え部(40)よりも動力上手側のギヤの回転数を検出する車速検出部(41)を備えるとともに、この車速検出部(41)の検出回転に基づいて車速を演算し、且つ、前記ホイール型後輪(16)若しくはセミクローラ型走行装置(20)の装着状態に応じて、前記クラッチ(34)の作動特性を変更する制御部(50)を備えた作業車両に於いて、
上記ホイール型後輪(16)とセミクローラ型走行装置(20)とで変速装置の湿式多板クラッチの作動特性の変更にあたり、
モード切り換え部(42)の設定により、
ホイールモード設定時には、車体発進時にクラッチ接続圧を比較的急速に上昇させ早い時間で昇圧を完了させ、
セミクローラモード設定時には、車体発進時にクラッチ接続圧を比較的緩慢に上昇させホイールモードよりも長い時間で昇圧を完了させるように、
制御させたから、
ホイール型とセミクローラ型との組み換え作業が極めて容易に行うことができるとともに、ホイール型後輪若しくはセミクローラ型走行装置の装着状態に応じて、クラッチの作動特性を変更するようにしたので、夫々の仕様に応じて最適な走行変速制御を行うことが可能である。
【0024】
請求項2記載の発明は、ホイールモード設定時には、上記回転数切り換え部(40)のシフタが後方へスライドして前輪伝達軸(37)が前後一体に直結され、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されることなく前車軸(12)方向に伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示し、
且つ、上記セミクローラモード設定時には、上記回転数切り換え部(40)のシフタが前方へスライドして、前輪伝達軸(37)の回転が減速機構(40a)に伝わり、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されて前車軸(12)方向へ伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示するものであるところ、
ミッションケース内に回転切り換え部(40)を設け、該回転切り換え部(40)の切り換えによって前輪(13)の回転数を合わせるように構成することを通じてホイール型とセミクローラ型との組み換え作業を極めて容易に行うことができる。また、前車軸部分に減速機構を装着するスペースがない場合でも、減速機構の取り付けが可能であり、ホイールベースが長くなることがないので、セミクローラ型での走行性が低下することはない。
【図面の簡単な説明】
図は本発明の一実施の形態を示すものである。
【図1】ホイール型トラクタの側面図。
【図2】セミクローラ型トラクタの側面図。
【図3】ミッションケース内の変速装置の構成を示す縦断側面図。
【図4】モニタパネルの正面図。
【図5】制御系のブロック図。
【図6】クラッチの作動特性を示すグラフ。
【図7】他の実施の形態を示し、ホイール型トラクタの側面図。
【図8】他の実施の形態を示し、セミクローラ型トラクタの側面図。
【符号の説明】
10a ホイール型トラクタ
10b セミクローラ型トラクタ
11 エンジン
12 前車軸
13 ホイール型前輪
14 ミッションケース
15 後車軸
15a ホイール型後車軸
15b セミクローラ型後車軸
16 ホイール型後輪
17 運転席
19 モニタパネル
20 セミクローラ型走行装置
21 駆動スプロケット
23 従動スプロケット
24 クローラ
34 前後進クラッチ
40 回転切り換え部
41 車速センサ
42 モード切り換え部
43 車速表示部
45 前後進ソレノイド
Claims (2)
- 前車軸(12)にはホイール型前輪(13)を装着し、後車軸(15)に、ホイール型後輪(16)、若しくは、駆動スプロケット(21)と従動スプロケット(23)間にクローラ(24)を巻装したセミクローラ型走行装置(20)を選択的に装着可能な作業車両であって、前記作業車両には、変速操作に伴い動力伝達を入り切りするクラッチ(34)を備え、動力伝達経路には、ホイール型後輪(16)若しくはセミクローラ型走行装置(20)を装着したときに、ミッションケース(14b)内に、前記前輪(13)の回転数を合わせる回転数切り換え部(40)と、この回転数切り換え部(40)よりも動力上手側のギヤの回転数を検出する車速検出部(41)とを備えるとともに、この車速検出部(41)の検出回転に基づいて車速を演算し、且つ、前記ホイール型後輪(16)若しくはセミクローラ型走行装置(20)の装着状態に応じて、前記クラッチ(34)の作動特性を変更する制御部(50)を備えた作業車両に於いて、
上記ホイール型後輪(16)とセミクローラ型走行装置(20)とで変速装置の湿式多板クラッチの作動特性の変更にあたり、
モード切り換え部(42)の設定により、
ホイールモード設定時には、車体発進時にクラッチ接続圧を比較的急速に上昇させ早い時間で昇圧を完了させ、
セミクローラモード設定時には、車体発進時にクラッチ接続圧を比較的緩慢に上昇させホイールモードよりも長い時間で昇圧を完了させるように、
制御させることを特徴とする作業車両。 - 上記モード切り換え部(42)の設定により、
上記ホイールモード設定時には、上記回転数切り換え部(40)のシフタが後方へスライドして前輪伝達軸(37)が前後一体に直結され、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されることなく前車軸(12)方向に伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示し、且つ、上記セミクローラモード設定時には、上記回転数切り換え部(40)のシフタが前方へスライドして、前輪伝達軸(37)の回転が減速機構(40a)に伝わり、四駆切り換えクラッチ(38)から前方に出力される回転動力が減速されて前車軸(12)方向へ伝達され、前記制御部(50)は車速検出部(41)の検出信号から演算処理を行ない車体の走行速度を演算して車体表示部(43)に表示することを特徴とする請求項1記載の作業車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001121253A JP4635368B2 (ja) | 2001-04-19 | 2001-04-19 | 作業車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001121253A JP4635368B2 (ja) | 2001-04-19 | 2001-04-19 | 作業車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002316674A JP2002316674A (ja) | 2002-10-29 |
| JP4635368B2 true JP4635368B2 (ja) | 2011-02-23 |
Family
ID=18971165
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001121253A Expired - Fee Related JP4635368B2 (ja) | 2001-04-19 | 2001-04-19 | 作業車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635368B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005319882A (ja) * | 2004-05-10 | 2005-11-17 | Tadano Ltd | タイヤとクローラ装置とを交換可能な作業車両 |
| JP4594071B2 (ja) * | 2004-12-24 | 2010-12-08 | ヤンマー株式会社 | トラクタ |
| JP4729972B2 (ja) * | 2005-05-10 | 2011-07-20 | 井関農機株式会社 | 作業車両の変速制御装置 |
| CN109537655B (zh) * | 2019-01-15 | 2023-05-12 | 山东科技大学 | 一种适用于复杂工况的铲斗装载机及其应用 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0986212A (ja) * | 1995-09-25 | 1997-03-31 | Suzuki Motor Corp | 小型車両の運転状態表示装置 |
| JP3937634B2 (ja) * | 1999-02-26 | 2007-06-27 | 井関農機株式会社 | トラクター |
-
2001
- 2001-04-19 JP JP2001121253A patent/JP4635368B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002316674A (ja) | 2002-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4928239B2 (ja) | 作業車 | |
| JP6869808B2 (ja) | 作業機の制御装置、作業機の制御方法及び作業機 | |
| EP4053000A1 (en) | Work vehicle | |
| JP5797499B2 (ja) | 農業用トラクタ | |
| JP3907464B2 (ja) | トラクタ | |
| JP4635368B2 (ja) | 作業車両 | |
| JP4570285B2 (ja) | トラクタ | |
| JPH08104211A (ja) | コンバインの後進自動停止装置 | |
| JP7156186B2 (ja) | 作業車両 | |
| JP7001499B2 (ja) | 作業車輌 | |
| JP5950516B2 (ja) | 作業車両 | |
| JP2021107202A (ja) | 作業車両 | |
| JP3589945B2 (ja) | エンジン制御方法 | |
| JP4882190B2 (ja) | トラクタ | |
| JP3513929B2 (ja) | トラクタの操向ブレ−キ制御装置 | |
| JPH065246Y2 (ja) | 移動農機のデフロツク解除装置 | |
| JP2004155217A (ja) | 農用走行車両の倍速変速装置 | |
| JP3365408B2 (ja) | トラクターの旋回制御装置 | |
| JP3738520B2 (ja) | トラクタの四輪駆動制御装置 | |
| JP6985959B2 (ja) | 作業車輌 | |
| JP2019060426A (ja) | 作業車 | |
| JPH0613027Y2 (ja) | パワ−ステアリング装置 | |
| JP2000318994A (ja) | 油圧駆動式フォークリフト | |
| JP2002274213A (ja) | 田植機の操作装置 | |
| JPH084344Y2 (ja) | ハーベスタの変速機構の取付構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100720 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100910 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635368 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |