JP4610341B2 - 非接触光学測定装置を用いて、カスタムフィットする人工爪を作成するシステム及び方法 - Google Patents
非接触光学測定装置を用いて、カスタムフィットする人工爪を作成するシステム及び方法 Download PDFInfo
- Publication number
- JP4610341B2 JP4610341B2 JP2004552215A JP2004552215A JP4610341B2 JP 4610341 B2 JP4610341 B2 JP 4610341B2 JP 2004552215 A JP2004552215 A JP 2004552215A JP 2004552215 A JP2004552215 A JP 2004552215A JP 4610341 B2 JP4610341 B2 JP 4610341B2
- Authority
- JP
- Japan
- Prior art keywords
- nail
- artificial nail
- artificial
- dimensional shape
- natural
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D31/00—Artificial nails
Description
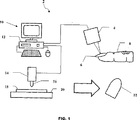
図1に関して、本発明の人工爪作成システム2は、指8の爪6の形状及び寸法を測定するための光学測定装置4を備える。光学測定装置4は、関連技術における当業者に公知である種類の装置である。例えば、光学測定装置は、「高速三次元表面測定、表面検査およびリバース−CADシステム」という名称の、米国特許No.5,175,601(参照により本明細書に組み込まれる。)に開示されている種類のものであってもよい。光学測定装置4は、コンピュータシステム12を含む測定デザインシステム10に接続されている。測定デザインシステム10は、台20の上に載せられた材料18を人工爪22に機械加工するための加工工具16を備えた、機械加工装置14に接続されている。一実施例における機械加工装置14は、関連技術の当業者に公知のコンピュータ数値制御(CNC)装置である。例えば、機械加工装置14は、「直線軸及び回転軸に沿って指示通りに被加工品を機械加工するために、工作機械を制御するための数値制御装置」という名称の、米国特許No.5,493,502(参照により本明細書に組み込まれる。)に開示されている種類のものであってもよい。コンピュータシステム12は、モニタ、キーボード及びマウス等のポインティングデバイスを取り付けたマイクロプロセッサベースのコンピュータである。コンピュータは、アプリケーションプログラムやデータを保存したり読み出したりするための、ハードドライブ及びRAMといった記憶装置を備える。
(1)ポインティングデバイスを用いて、コンピュータモニタの画面上に、指8の爪6の輪郭を描くこと、あるいは
(2)境界抽出アルゴリズムによって、爪6の境界を自動的に判断すること。
どちらも、関連技術の当業者には周知の方法である。
機械加工装置14は、互いに垂直な少なくとも3つのモータ駆動による平行移動軸を有するであろう。加工工具16は、少なくとも2つの垂直な方向に沿って制御可能に位置決めすることができる。材料18は、完成品の人工爪22を提供するのに十分な長さ、幅及び高さを有する長方形の形状で供給される。図8に関し、機械加工処理の最初のステップ100において、材料18が機械加工装置14(CNC機)に装着される。次に、ステップ102において、ステップ90で作成された機械で使用可能なコードが、機械加工装置14により受信される。続いて、ステップ104において、人工爪22用の材料18の表面の一方の側が切削される。そしてステップ106においては、ステップ108において人工爪22の他方の側を切削するため、材料18を180度回転させる。ステップ104及びステップ108においては、二次元あるいは三次元の装飾的デザインあるいは数字、文字等の印を機械加工することができる。次に、ステップ110において、人工爪22が残りの材料18から分離される。最後に、ステップ112において、人工爪22の必要な仕上げのやすりかけが行われる。こうして、人工爪作成システム2による人工爪22が作成される。
Claims (21)
- カスタムフィットする三次元の人工爪であって、該人工爪の一部が、天然爪の上面に実質上適合する形状を少なくとも半剛的に維持する、人工爪を作成するシステムであって、
天然爪の三次元形状を表すx、y及びz軸座標を非接触的に測定する、光源及びカメラを備えた非接触測定システムと、
前記人工爪の長さ及び三次元のスタイルを含むパラメータの選択を提供することにより、前記人工爪の三次元形状をデザインするためのデザインシステムと、
前記天然爪の前記三次元形状を表す前記x、y及びz軸座標と前記選択されたパラメータとから、前記人工爪の三次元デザインを計算する前記デザインシステム内の計算モジュールと、
前記人工爪の前記三次元デザインを用いて前記人工爪を作成する機械加工装置であって、該人工爪の下面が該天然爪の上面に実質上適合する形状を少なくとも半剛的に維持する機械加工装置と、を備え、
前記デザインシステムは、
顧客の名前と爪の番号を入力する手段と、
入力された顧客の名前と爪番号に対応する爪の三次元形状の情報を予め記憶している記憶手段から読み出す手段と、
人工爪の厚さ及び長さを選択する手段と、
爪の長さ方向及び幅方向に沿った人工爪の上面の形状及び人工爪の先端のスタイルをデザインする手段と、
入力された情報及びパラメータに従って人工爪の三次元形状を計算する手段と、
を備えた、システム。 - 前記デザインシステムは、天然爪の形状を規定する三次元形状データを表示し、選択された人工爪の厚さ、及び人工爪の長さ方向と幅方向の両方における選択された上面形状に基づいて、人工爪の上面を規定し、該上面及び三次元形状データから得られた下面を用いて、延長された人工爪の上面及び延長された人工爪の下面を規定する、請求項1に記載のシステム。
- カスタムフィットする三次元の人工爪であって、該人工爪の一部が、天然爪の上面に実質上適合する形状を少なくとも半剛的に維持する、人工爪を作成する方法であって、
光源及びカメラを備えた非接触測定システムを用いて天然爪の三次元形状を表すx、y及びz軸座標を非接触的に測定するステップと、
前記人工爪の長さ及び三次元のスタイルを含むパラメータの選択を提供することにより、前記人工爪の三次元形状をデザインするデザインステップと、
前記天然爪の前記三次元形状を表す前記x、y及びz軸座標と前記選択されたパラメータとから、前記人工爪の三次元デザインを計算する計算ステップと、
前記人工爪の前記三次元デザインを用いて前記人工爪を作成する機械加工装置により、該人工爪の下面が該天然爪の上面に実質上適合する形状を少なくとも半剛的に維持する機械加工ステップと、を備え、
前記デザインステップは、
顧客の名前及び爪の番号を入力するステップと、
顧客の名前及び爪番号に対応する爪の三次元形状の情報を記憶手段から読み出すステップと、
人工爪の厚さ及び長さを選択するステップと、
爪の長さ方向及び幅方向に沿った人工爪の上面の形状及び人工爪の先端のスタイルをデザインするステップと、
入力された情報及びパラメータに従って人工爪の三次元形状を計算するステップと、を備えた方法。 - 前記デザインステップでは、天然爪の形状を規定する三次元形状データを表示し、選択された人工爪の厚さ、及び人工爪の長さ方向と幅方向の両方における選択された上面形状に基づいて、人工爪の上面を規定し、該上面及び三次元形状データから得られた下面を用いて、延長された人工爪の上面及び延長された人工爪の下面を規定する、請求項3に記載の方法。
- カスタムフィットする三次元の人工爪を作成するための、該人工爪の一部が、天然爪の上面に実質上適合する形状を少なくとも半剛的に維持するシステムであって、
天然爪の三次元形状を表すx、y及びz軸座標を非接触的に測定する、光源及びカメラを備えた非接触測定システムと、
前記人工爪の長さ及び三次元のスタイルを含むパラメータの選択を提供することにより、前記人工爪の三次元形状をデザインするためのデザインシステムと、
前記天然爪の前記三次元形状を表す前記x、y及びz軸座標と前記選択されたパラメータとから、前記人工爪の三次元デザインを計算する前記デザインシステム内の計算モジュールと、
前記人工爪の前記三次元デザインを用いて前記人工爪を作成する機械加工装置であって、該人工爪の下面が該天然爪の上面に実質上適合する形状を少なくとも半剛的に維持する機械加工装置と、
を備えていることを特徴とするシステム。 - 前記光源が前記天然爪の上にパターンを投影し、前記カメラが該天然爪の二次元のグリッド画像を記録し、前記デザインシステムが該天然爪の前記三次元形状を表す前記x、y及びz軸座標を計算することを特徴とする、請求項5に記載のシステム。
- 前記光源がレーザであり、前記非接触測定システムが前記天然爪を走査して、該天然爪の前記三次元形状を表す前記x、y及びz軸座標を計算することを特徴とする、請求項5に記載のシステム。
- 前記非接触測定システムが、前記天然爪の前記三次元形状を前記機械加工装置用の機械コードに変換することを特徴とする、請求項5に記載のシステム。
- 前記機械加工装置が、材料を前記人工爪に切削するための機械データを受領するコンピュータ数値制御装置であることを特徴とする、請求項5に記載のシステム。
- 天然爪とともに用いられる人工爪を特注デザインする方法であって、
三次元形状を非接触的に測定する非接触測定システムにより、前記天然爪の前記三次元形状を表すx、y及びzデータ点を計算するステップと、
前記人工爪のためのパラメータを選択するステップであって、該選択されるパラメータが長さ及びスタイルを含むステップと、
前記天然爪の前記x、y及びzデータ点及び前記人工爪のための前記パラメータから、該人工爪の三次元形状を計算するステップと、
前記天然爪の表面に前記人工爪の下面がカスタムフィットする前記人工爪を前記三次元形状に基づいて機械加工するステップと、
を含むことを特徴とする方法。 - 前記人工爪の前記三次元形状を、該人工爪の機械加工用の機械データに変換するステップを更に含むことを特徴とする、請求項10に記載の方法。
- 前記機械データが機械コードであることを特徴とする、請求項11に記載の方法。
- 前記人工爪を機械加工するステップの前に、前記人工爪の前記三次元形状を表示するステップを更に含むことを特徴とする、請求項10に記載の方法。
- 天然爪の光学画像に基づいて、該天然爪に適合するよう特注の人工爪をデザインするための、コンピュータにより実行される方法であって、
非接触三次元形状測定により得られた天然爪の表面を含む指の表面を規定する画像データを、光学画像装置から受領するステップと、
前記画像データから前記天然爪の表面の三次元形状を表すx、y及びzデータ点を規定する画像データの一部を抽出するステップと、
前記人工爪用のデザインを選択するステップと、
前記人工爪用の三次元形状データ構造を作成するステップであって、該データ構造が、
前記天然爪の表面の前記三次元形状を表す前記x、y及びzデータ点と前記人工爪用のデザインとを含むステップと、
前記三次元形状データ構造を、前記天然爪の表面に前記人工爪の下面が適合するように材料から前記人工爪を切削するための機械データに変換するステップと、
を含む方法。 - 前記画像データが、複数の天然爪の表面を含む複数の指の表面を規定することを特徴とする、請求項14に記載の方法。
- 前記三次元形状データ構造を作成するステップが、
前記人工爪の上面を規定するステップであって、該上面の一部が前記天然爪の表面の境界面に対応するステップと、
該人工爪の長さを規定するステップと、
該人工爪の厚さを規定するステップと、
該人工爪のスタイルを規定するステップと、
を更に含むことを特徴とする、請求項14に記載の方法。 - 前記三次元形状データ構造が、前記材料から前記人工爪を切削するためのコンピュータ数値制御装置によって読み出し可能な機械コードに変換されることを特徴とする、請求項14に記載の方法。
- 前記機械データが、コンピュータ数値制御機に適した機械コードであることを特徴とする、請求項14に記載の方法。
- 天然爪の光学画像に基づいて、該天然爪に適合するよう特注の三次元の人工爪をデザインするための、コンピュータにより実行される方法であって、
非接触三次元形状測定により得られた複数の天然爪の表面を含む複数の指の表面を規定する画像データを、光学画像装置から受領するステップと、
前記画像データから、前記複数の天然爪の表面の三次元形状を表すx、y及びzデータ点を規定する画像データの一部を抽出するステップと、
複数の人工爪用の少なくとも1つのデザインを選択するステップと、
前記複数の人工爪のそれぞれに1つずつの複数の三次元形状データ構造を作成するステップであって、各データ構造が、前記複数の天然爪のそれぞれの表面のうちの1つの三次元形状を表す前記x、y及びzデータ点を規定するデータ及び前記人工爪用のデザインとを含むステップと、
前記三次元形状データ構造を、前記天然爪の表面に前記人工爪の下面が適合するように材料から前記複数の人工爪を切削するための機械データに変換するステップと、
を含む方法。 - 前記機械データが、コンピュータ数値制御機に適した機械コードであることを特徴とする、請求項19に記載のコンピュータにより実行される方法。
- 請求項1又は5のシステムにより製造される人工爪。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US42595202P | 2002-11-13 | 2002-11-13 | |
| PCT/US2003/036380 WO2004043200A1 (en) | 2002-11-13 | 2003-11-13 | A system and process for creating custom fit artificial fingernails using a non-contact optical measuring device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006519030A JP2006519030A (ja) | 2006-08-24 |
| JP2006519030A5 JP2006519030A5 (ja) | 2006-12-28 |
| JP4610341B2 true JP4610341B2 (ja) | 2011-01-12 |
Family
ID=32313084
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004552215A Expired - Fee Related JP4610341B2 (ja) | 2002-11-13 | 2003-11-13 | 非接触光学測定装置を用いて、カスタムフィットする人工爪を作成するシステム及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7123983B2 (ja) |
| EP (1) | EP1581076B1 (ja) |
| JP (1) | JP4610341B2 (ja) |
| AT (1) | ATE554675T1 (ja) |
| WO (1) | WO2004043200A1 (ja) |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2002328420A1 (en) * | 2002-09-03 | 2004-03-29 | Mastermind Co., Ltd. | Printing system using ink-jet printer |
| US20090092310A1 (en) * | 2004-02-06 | 2009-04-09 | Gifford Craig P | System and method for precision fit artificial fingernails |
| US20060033758A1 (en) * | 2004-08-15 | 2006-02-16 | Nielson Scott L | A method, process and computer program to automatically create a customized three-dimensional nail object by morphing |
| US7526416B2 (en) * | 2004-08-15 | 2009-04-28 | American Equities Management, Llc | Method, process and computer program to automatically create a customized three-dimensional nail object by welding |
| WO2005077132A2 (en) * | 2004-02-06 | 2005-08-25 | Nielson Scott L | Custom fit artificial nails and related systems, methods, and software |
| US20060034507A1 (en) * | 2004-08-16 | 2006-02-16 | Nielson Scott L | A method, process and computer program to automatically create a customized three-dimensional nail object by library reference |
| US7536286B2 (en) * | 2004-08-14 | 2009-05-19 | American Equities Management, Llc | Method, process and computer program to automatically create a customized three-dimensional nail object |
| WO2007076683A1 (fr) * | 2005-12-30 | 2007-07-12 | Ning Wu | Procede de selection et de modification en temps reel d'un motif d'ornement d'ongle |
| CN100412904C (zh) * | 2006-09-30 | 2008-08-20 | 吴宁 | 一种实时变化美甲图案的方法 |
| WO2008140536A2 (en) | 2006-09-29 | 2008-11-20 | Janice Jordan | Methods and devices for applying solid nail coatings to mammalian and artificial nails |
| CN102281793B (zh) * | 2009-01-16 | 2015-04-29 | 宝洁公司 | 改变角质表面的设备和方法 |
| US8757171B2 (en) * | 2009-10-06 | 2014-06-24 | Mattel, Inc. | Finger positioning device for a printer |
| US20110087351A1 (en) * | 2009-10-09 | 2011-04-14 | Rohit Sachdeva | Customized artificial nail |
| FR2964305B1 (fr) * | 2010-09-06 | 2019-06-28 | L'oreal | Procede de fabrication d'articles cosmetiques personnalises, notamment de faux ongles et articles ainsi realises |
| TW201212852A (en) * | 2010-09-21 | 2012-04-01 | Zong Jing Investment Inc | Facial cosmetic machine |
| US8590543B2 (en) | 2010-11-17 | 2013-11-26 | Mattel, Inc. | Hair extension kit |
| JP5732840B2 (ja) * | 2010-12-14 | 2015-06-10 | カシオ計算機株式会社 | ネイルプリント装置および印刷制御方法 |
| JP5803096B2 (ja) * | 2010-12-14 | 2015-11-04 | カシオ計算機株式会社 | ネイルプリント装置および印刷制御方法 |
| JP5732916B2 (ja) * | 2011-03-03 | 2015-06-10 | カシオ計算機株式会社 | ネイルプリント装置および印刷制御方法 |
| JP5494562B2 (ja) * | 2011-04-28 | 2014-05-14 | カシオ計算機株式会社 | 曲面印刷装置及び曲面印刷装置の印刷制御方法 |
| JP5338848B2 (ja) * | 2011-05-09 | 2013-11-13 | カシオ計算機株式会社 | ネイルプリント装置及びネイルプリント装置の印刷制御方法 |
| JP5402980B2 (ja) * | 2011-05-09 | 2014-01-29 | カシオ計算機株式会社 | ネイルプリント装置及びネイルプリント装置の印刷制御方法 |
| DE102011114674C5 (de) * | 2011-09-30 | 2020-05-28 | Steinbichler Optotechnik Gmbh | Verfahren und Vorrichtung zum Bestimmen der 3D-Koordinaten eines Objekts |
| JP2013094184A (ja) * | 2011-10-28 | 2013-05-20 | Casio Computer Co Ltd | ネイルプリント装置 |
| TWI463955B (zh) * | 2012-02-20 | 2014-12-11 | Zong Jing Investment Inc | Eye makeup device |
| WO2013145040A1 (ja) * | 2012-03-30 | 2013-10-03 | パナソニック株式会社 | ネイルチップ製造システム、ネイルチップ製造方法 |
| EP2892708B1 (en) | 2012-09-05 | 2018-10-10 | Aprecia Pharmaceuticals LLC | Three-dimensional printing system and equipment assembly |
| US9398797B2 (en) * | 2012-12-31 | 2016-07-26 | Yong Li | Nail gauge measuring nail shape and nail arc length |
| US9227359B2 (en) * | 2012-12-31 | 2016-01-05 | Yong Li | System and method for manufacturing custom-fit three-dimensional artificial nails |
| WO2014144512A1 (en) | 2013-03-15 | 2014-09-18 | Aprecia Pharmaceuticals Company | Rapid disperse dosage form containing levetiracetam |
| US9687059B2 (en) * | 2013-08-23 | 2017-06-27 | Preemadonna Inc. | Nail decorating apparatus |
| US11265444B2 (en) | 2013-08-23 | 2022-03-01 | Preemadonna Inc. | Apparatus for applying coating to nails |
| US9189186B2 (en) | 2013-09-18 | 2015-11-17 | Jamberry Nails, LLC | Method and system for custom designing nail wraps |
| KR102258547B1 (ko) * | 2013-12-31 | 2021-05-31 | 피나일스 오와이 | 네일 관리를 위한 방법 및 시스템 |
| JP6439342B2 (ja) * | 2014-09-22 | 2018-12-19 | カシオ計算機株式会社 | 爪情報検出装置、描画装置及び爪情報検出方法 |
| JP6435749B2 (ja) * | 2014-09-26 | 2018-12-12 | カシオ計算機株式会社 | ネイルデザイン表示制御装置、ネイルプリント装置、ネイルデザイン表示制御方法及びネイルデザイン表示制御プログラム |
| CN104382327A (zh) * | 2014-12-03 | 2015-03-04 | 曹乃承 | 美甲装置和美甲、健康管理、信息推送方法 |
| JP6561462B2 (ja) | 2014-12-19 | 2019-08-21 | カシオ計算機株式会社 | ネイルプリント装置及びネイルプリント装置の描画方法 |
| JP6428411B2 (ja) * | 2015-03-18 | 2018-11-28 | カシオ計算機株式会社 | 描画装置及び爪傾き検出方法 |
| JP6428415B2 (ja) * | 2015-03-20 | 2018-11-28 | カシオ計算機株式会社 | 描画装置及び爪形状検出方法 |
| BR112018001609A2 (pt) | 2015-08-21 | 2018-09-18 | Aprecia Pharmaceuticals LLC | sistema e montagem de equipamento de impressão tridimensional |
| JP6529902B2 (ja) * | 2015-12-22 | 2019-06-12 | 株式会社東芝 | 付け爪および付け爪の製造方法 |
| WO2017174703A2 (en) | 2016-04-08 | 2017-10-12 | L'oreal | Process for manufacturing a false nail |
| US10765658B2 (en) | 2016-06-22 | 2020-09-08 | Mastix LLC | Oral compositions delivering therapeutically effective amounts of cannabinoids |
| JP6790513B2 (ja) * | 2016-07-05 | 2020-11-25 | カシオ計算機株式会社 | 描画装置及び描画装置の描画方法 |
| JPWO2018016205A1 (ja) | 2016-07-20 | 2019-05-09 | ソニー株式会社 | ネイル製作システムおよびネイル製作方法 |
| JPWO2018016206A1 (ja) * | 2016-07-20 | 2019-05-09 | ソニー株式会社 | 注文受付装置および注文受付方法 |
| CN106239052B (zh) * | 2016-08-25 | 2019-02-22 | 黄世咸 | 一种汽车保险杠改装制造工艺 |
| WO2018142400A1 (en) * | 2017-01-31 | 2018-08-09 | Nailomatic Ltd. | A nail polish kit for use by an automated nail polish application apparatus |
| CN109259411A (zh) * | 2017-07-18 | 2019-01-25 | 曹可瀚 | 美甲机和美甲方法 |
| US10806231B2 (en) * | 2017-07-18 | 2020-10-20 | Casio Computer Co., Ltd. | Drawing apparatus, drawing method, and recording medium storing program |
| JP7020020B2 (ja) * | 2017-09-20 | 2022-02-16 | カシオ計算機株式会社 | 描画データ生成装置、描画データ生成方法及びプログラム |
| WO2019070886A1 (en) | 2017-10-04 | 2019-04-11 | Preemadonna Inc. | SYSTEMS AND METHODS FOR ADAPTIVE NAILS PRINTING AND COLLABORATIVE BEAUTY PLATFORM HOSTING |
| JP7124419B2 (ja) * | 2018-04-25 | 2022-08-24 | カシオ計算機株式会社 | ネイルプリント装置 |
| US20200105007A1 (en) * | 2018-09-28 | 2020-04-02 | Mani.Me, Inc. | Apparatus and method for model reconstruction using photogrammetry |
| GB201913301D0 (en) | 2019-09-14 | 2019-10-30 | Hoang Kim | A method for obtaining and storing information suitable for production of artificial nails for an individual |
| JP2023500675A (ja) * | 2019-10-29 | 2023-01-10 | ネイルプロ・インコーポレイテッド | 自動トータルネイルケアシステム、装置および方法 |
| WO2021156995A1 (ja) * | 2020-02-06 | 2021-08-12 | ピー・シャイン株式会社 | ネイルチップ、その製造システム及び製造方法 |
| US20220322809A1 (en) * | 2021-04-07 | 2022-10-13 | Elham Al-Muslim | Artificial nail measurement system and method |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US32654A (en) * | 1861-06-25 | Melodeon | ||
| US4645348A (en) * | 1983-09-01 | 1987-02-24 | Perceptron, Inc. | Sensor-illumination system for use in three-dimensional measurement of objects and assemblies of objects |
| US5172601A (en) * | 1991-08-12 | 1992-12-22 | Hoover Universal, Inc. | Drive nut and screw for seat adjuster |
| JP3036143B2 (ja) * | 1991-09-02 | 2000-04-24 | 三菱電機株式会社 | 数値制御装置 |
| US5175601A (en) | 1991-10-15 | 1992-12-29 | Electro-Optical Information Systems | High-speed 3-D surface measurement surface inspection and reverse-CAD system |
| US5309365A (en) * | 1992-07-02 | 1994-05-03 | Gerber Scientific Products, Inc. | System for cutting artificial nail tips and for decorating the same or existing nails using automated cutting processes |
| US5968302A (en) * | 1997-05-16 | 1999-10-19 | Ova Nail Products, Inc. | Methods for manufacturing precision fit fingernails |
| US6328949B1 (en) | 1998-10-14 | 2001-12-11 | Dino Tessarolo | Nail covering system |
| JP3016147B1 (ja) * | 1998-12-25 | 2000-03-06 | 株式会社アトラス | ネイルア―ト装置 |
| US6035860A (en) | 1999-01-14 | 2000-03-14 | Belquette Ltd. | System and method for applying fingernail art |
| JP3081598B1 (ja) * | 1999-02-15 | 2000-08-28 | 悟 馬場 | つけ爪チップの作製方法 |
| US6464496B1 (en) * | 1999-11-30 | 2002-10-15 | Orametrix, Inc. | Method and apparatus for determining and monitoring orthodontic treatment |
| EP1297409B1 (en) * | 2000-03-31 | 2008-05-14 | Cosmetic Technologies LLC | Custom cosmetic dispensing system |
| US6382217B2 (en) * | 2000-04-06 | 2002-05-07 | Wade Coker | Process for fabricating custom fit removable and reusable metal fingernails |
-
2003
- 2003-11-13 JP JP2004552215A patent/JP4610341B2/ja not_active Expired - Fee Related
- 2003-11-13 US US10/712,547 patent/US7123983B2/en not_active Expired - Fee Related
- 2003-11-13 AT AT03783459T patent/ATE554675T1/de active
- 2003-11-13 EP EP03783459A patent/EP1581076B1/en not_active Expired - Lifetime
- 2003-11-13 WO PCT/US2003/036380 patent/WO2004043200A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| ATE554675T1 (de) | 2012-05-15 |
| US20040143359A1 (en) | 2004-07-22 |
| JP2006519030A (ja) | 2006-08-24 |
| US7123983B2 (en) | 2006-10-17 |
| WO2004043200A1 (en) | 2004-05-27 |
| EP1581076B1 (en) | 2012-04-25 |
| EP1581076A1 (en) | 2005-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4610341B2 (ja) | 非接触光学測定装置を用いて、カスタムフィットする人工爪を作成するシステム及び方法 | |
| US20090092310A1 (en) | System and method for precision fit artificial fingernails | |
| EP1151778B1 (en) | Real 3-d model forming device | |
| US11344392B2 (en) | Computer implemented method for modifying a digital three-dimensional model of a dentition | |
| JP2006519030A5 (ja) | ||
| JP7210569B2 (ja) | 化粧組成物を塗布するための個人向けアプリケータを製造するための方法 | |
| CN114375168B (zh) | 获取和存储适用于为个人生产人造指甲的信息的方法 | |
| JPH09103438A (ja) | 人工歯及び人工歯を形成するための金型 | |
| KR101430122B1 (ko) | 헤어스타일 시뮬레이션 시스템, 시뮬레이션 방법 및 시뮬레이션 방법을 실현시키기 위한 프로그램을 기록한 컴퓨터 판단가능한 기록매체 | |
| KR20200056414A (ko) | 화장 조성물의 도포를 위한 맞춤형 어플리케이터의 제조 방법 | |
| WO2005077132A2 (en) | Custom fit artificial nails and related systems, methods, and software | |
| KR100924598B1 (ko) | 3차원 모델 생성 방법 | |
| JPH1178384A (ja) | 3次元形状データ処理装置並びに被彫刻板及び彫刻装置 | |
| JP2000321050A (ja) | 3次元データ取得装置および3次元データ取得方法 | |
| EP1732042A1 (fr) | Procédé et système d'élaboration de caractéristiques géométriques d'une image encodée numériquement | |
| US20020033819A1 (en) | Apparatus and method for three-dimensional scanning of a subject, fabrication of a model therefrom, and the model produced thereby | |
| JPH11188183A (ja) | 3次元形状データ処理装置及びモデリングシステム | |
| EP4036927A1 (en) | Computer implemented methods for dental design | |
| JP2000346617A (ja) | 3次元形状データ処理装置 | |
| US20230048898A1 (en) | Computer implemented methods for dental design | |
| JPH11328444A (ja) | モデリングシステム | |
| JP2002153307A (ja) | 装身具の製造方法及びアセンブリ装置 | |
| Kaplan | Digital sculpture restoration | |
| JPH11161821A (ja) | 3次元形状データ処理装置及びモデリングシステム | |
| JP2001208521A (ja) | 3次元データ処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091117 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100708 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100914 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131022 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |