JP4600540B2 - 駆動源の制御装置 - Google Patents
駆動源の制御装置 Download PDFInfo
- Publication number
- JP4600540B2 JP4600540B2 JP2008198302A JP2008198302A JP4600540B2 JP 4600540 B2 JP4600540 B2 JP 4600540B2 JP 2008198302 A JP2008198302 A JP 2008198302A JP 2008198302 A JP2008198302 A JP 2008198302A JP 4600540 B2 JP4600540 B2 JP 4600540B2
- Authority
- JP
- Japan
- Prior art keywords
- engine torque
- dynamic
- engine
- torque
- static
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
- B60W30/1882—Controlling power parameters of the driveline, e.g. determining the required power characterised by the working point of the engine, e.g. by using engine output chart
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
- B60W10/115—Stepped gearings with planetary gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0028—Mathematical models, e.g. for simulation
- B60W2050/0031—Mathematical model of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0695—Inertia
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D2011/101—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles
- F02D2011/102—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles at least one throttle being moved only by an electric actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/602—Pedal position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/18—Control of the engine output torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/18—Control of the engine output torque
- F02D2250/21—Control of the engine output torque during a transition between engine operation modes or states
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/08—Introducing corrections for particular operating conditions for idling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/006—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising eight forward speeds
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/2097—Transmissions using gears with orbital motion comprising an orbital gear set member permanently connected to the housing, e.g. a sun wheel permanently connected to the housing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/62—Gearings having three or more central gears
- F16H3/66—Gearings having three or more central gears composed of a number of gear trains without drive passing from one train to another
- F16H3/663—Gearings having three or more central gears composed of a number of gear trains without drive passing from one train to another with conveying rotary motion between axially spaced orbital gears, e.g. RAVIGNEAUX
Description
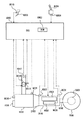
図1を参照して、本発明の実施の第1の形態に係る制御装置を搭載した車両について説明する。この車両は、FR(Front engine Rear drive)車両である。なお、FR以外の車両であってもよい。
る。車両のピッチングおよびバウンシングを抑制するための駆動力を設定する方法については、従来の技術を利用すればよいため、ここではその詳細な説明は繰り返さない。
以下、本発明の第2の実施の形態について説明する。本実施の形態は、静的な要求エンジントルクおよび動的な要求エンジントルクの2つのパラメータを有するマップを用いて、静的な要求エンジントルクを動的な要求エンジントルクに変換する点で、前述の第1の実施の形態と相違する。
スロットル開度センサ、8020 エンジン回転数センサ、8022 入力軸回転数センサ、8024 出力軸回転数センサ、8026 油温センサ、8028 水温センサ、9000 パワートレーンドライバモデル、9002 静的トルク設定部、9004 変換部、9006,9030 時定数算出部、9008 動的トルク設定部、9020 駆動力変換部、9022 調停部、9024 ドライバーズサポートシステム、9100 パワートレーンマネージャ、9102 調停部、9104 トルク変換部、9106 調停部、9110 VDIMシステム、9120 制振制御システム、9130 最高車速制限システム、9132 変換部、9140 トルク制御システム、9142 変換部、9200 エンジン制御システム。
Claims (4)
- 駆動源としてのエンジンの定常状態における前記エンジンの出力トルクの要求値である静的な第1の要求値を、アクセル開度に応じて設定するための手段と、
前記エンジンの過渡状態における前記エンジンの出力トルクの要求値である動的な第2の要求値を、車両の挙動に基づいて自動的に設定するための手段と、
前記第1の要求値および前記第2の要求値に応じて、前記エンジンの出力トルクの動的な第3の要求値に前記第1の要求値を変換するための変換手段と、
前記第2の要求値および前記第3の要求値の和に応じて前記エンジンを制御するための手段とを備える、駆動源の制御装置。 - 前記変換手段は、前記第1の要求値と前記第2の要求値との和に応じて、前記第3の要求値に前記第1の要求値を変換するための手段を含む、請求項1に記載の駆動源の制御装置。
- 前記変換手段は、前記第1の要求値および前記第2の要求値をパラメータに有するマップを用いて、前記第3の要求値に前記第1の要求値を変換するための手段を含む、請求項1に記載の駆動源の制御装置。
- 前記第2の要求値は、前記エンジンが出力すべき最小限の出力トルクに相当する、請求項1〜3のいずれかに記載の駆動源の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198302A JP4600540B2 (ja) | 2008-07-31 | 2008-07-31 | 駆動源の制御装置 |
| US12/505,870 US7983826B2 (en) | 2008-07-31 | 2009-07-20 | Control apparatus and control method for drive source |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198302A JP4600540B2 (ja) | 2008-07-31 | 2008-07-31 | 駆動源の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010037951A JP2010037951A (ja) | 2010-02-18 |
| JP4600540B2 true JP4600540B2 (ja) | 2010-12-15 |
Family
ID=41609177
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008198302A Expired - Fee Related JP4600540B2 (ja) | 2008-07-31 | 2008-07-31 | 駆動源の制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7983826B2 (ja) |
| JP (1) | JP4600540B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4702429B2 (ja) | 2008-10-16 | 2011-06-15 | トヨタ自動車株式会社 | 駆動源の制御装置 |
| JP4678444B2 (ja) * | 2009-04-09 | 2011-04-27 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5273121B2 (ja) * | 2010-10-19 | 2013-08-28 | 株式会社デンソー | 発進支援装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1182090A (ja) * | 1997-09-09 | 1999-03-26 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2003214231A (ja) * | 2002-01-29 | 2003-07-30 | Nissan Motor Co Ltd | エンジンのトルク制御装置 |
| JP2004308649A (ja) * | 2003-04-07 | 2004-11-04 | Robert Bosch Gmbh | 車両の駆動ユニットの駆動方法 |
| JP2005155410A (ja) * | 2003-11-25 | 2005-06-16 | Nissan Motor Co Ltd | エンジントルク制御装置 |
| JP2006138265A (ja) * | 2004-11-12 | 2006-06-01 | Toyota Motor Corp | 車両のトルク制御装置 |
| JP2006170079A (ja) * | 2004-12-16 | 2006-06-29 | Nissan Motor Co Ltd | 内燃機関の吸気制御装置 |
| JP2006183506A (ja) * | 2004-12-27 | 2006-07-13 | Hitachi Ltd | エンジンの制御装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5157608A (en) * | 1990-09-14 | 1992-10-20 | Ford Motor Company | Electronic control system for multiple ratio transmission including circuit pressure control |
| US5305663A (en) * | 1992-08-10 | 1994-04-26 | Ford Motor Company | Automatic transmission control system |
| DE19845157A1 (de) * | 1998-10-01 | 2000-04-06 | Zahnradfabrik Friedrichshafen | Verfahren zur Steuerung des Drehmomentes einer Brennkraftmaschine eines Kraftfahrzeuges mit einem Automatgetriebe |
| US6358184B1 (en) * | 2000-03-20 | 2002-03-19 | General Motors Corporation | Model-based control of an automatic transmission garage shift |
| DE10047502A1 (de) * | 2000-09-26 | 2002-04-11 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung der Drehzahl einer Antriebseinheit |
| FR2827339B1 (fr) | 2001-07-12 | 2005-11-11 | Renault | Dispositif de controle du point de fonctionnement du groupe motopropulseur d'un vehicule |
| US6687582B1 (en) * | 2002-08-08 | 2004-02-03 | Visteon Global Technologies, Inc. | Control of idle speed in a hybrid powertrain configuration |
| US6790159B1 (en) * | 2003-02-21 | 2004-09-14 | Borgwarner, Inc. | Method of controlling a dual clutch transmission |
| US6819997B2 (en) * | 2003-02-21 | 2004-11-16 | Borgwarner, Inc. | Method of controlling a dual clutch transmission |
| FR2870792B1 (fr) | 2004-05-28 | 2007-08-31 | Renault Sas | Procede de controle d'une consigne de couple a appliquer aux roues d'une transmission automatisee pour vehicule automobile et dispositif correspondant |
| JP4525434B2 (ja) * | 2005-04-13 | 2010-08-18 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
| JP4432861B2 (ja) * | 2005-08-22 | 2010-03-17 | トヨタ自動車株式会社 | 車両の駆動力制御装置 |
| JP4466539B2 (ja) * | 2005-11-08 | 2010-05-26 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
-
2008
- 2008-07-31 JP JP2008198302A patent/JP4600540B2/ja not_active Expired - Fee Related
-
2009
- 2009-07-20 US US12/505,870 patent/US7983826B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1182090A (ja) * | 1997-09-09 | 1999-03-26 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2003214231A (ja) * | 2002-01-29 | 2003-07-30 | Nissan Motor Co Ltd | エンジンのトルク制御装置 |
| JP2004308649A (ja) * | 2003-04-07 | 2004-11-04 | Robert Bosch Gmbh | 車両の駆動ユニットの駆動方法 |
| JP2005155410A (ja) * | 2003-11-25 | 2005-06-16 | Nissan Motor Co Ltd | エンジントルク制御装置 |
| JP2006138265A (ja) * | 2004-11-12 | 2006-06-01 | Toyota Motor Corp | 車両のトルク制御装置 |
| JP2006170079A (ja) * | 2004-12-16 | 2006-06-29 | Nissan Motor Co Ltd | 内燃機関の吸気制御装置 |
| JP2006183506A (ja) * | 2004-12-27 | 2006-07-13 | Hitachi Ltd | エンジンの制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100030398A1 (en) | 2010-02-04 |
| JP2010037951A (ja) | 2010-02-18 |
| US7983826B2 (en) | 2011-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4678444B2 (ja) | 車両の制御装置 | |
| JP4561889B2 (ja) | 出力トルクの算出装置 | |
| JP5195932B2 (ja) | 車両の制御装置および制御方法 | |
| JP5257508B2 (ja) | 駆動源の制御装置および制御方法 | |
| JP2009167873A (ja) | 動力源の制御装置 | |
| JP4600540B2 (ja) | 駆動源の制御装置 | |
| JP2009173158A (ja) | パワートレーンの制御装置 | |
| JP4702429B2 (ja) | 駆動源の制御装置 | |
| JP4872985B2 (ja) | 駆動源の制御装置 | |
| JP5082883B2 (ja) | パワートレーンの制御装置 | |
| JP4957566B2 (ja) | パワートレーンの制御装置 | |
| JP2009243284A (ja) | 駆動源の制御装置 | |
| JP2009250085A (ja) | 駆動源の制御装置 | |
| JP5136653B2 (ja) | パワートレーンの制御装置および制御方法 | |
| JP2009250084A (ja) | 駆動源の制御装置 | |
| JP2010236416A (ja) | 車両の異常判定装置 | |
| JP4894778B2 (ja) | エンジンの制御装置 | |
| JP2010121491A (ja) | 駆動源の制御装置 | |
| JP2010096093A (ja) | 駆動源の制御装置 | |
| JP2010120488A (ja) | 駆動源の制御装置 | |
| JP2010071356A (ja) | インジケータの制御装置 | |
| JP2010169019A (ja) | 駆動源の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100511 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100831 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100913 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4600540 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |