JP4589989B2 - サイクロン分離装置 - Google Patents
サイクロン分離装置 Download PDFInfo
- Publication number
- JP4589989B2 JP4589989B2 JP2008174478A JP2008174478A JP4589989B2 JP 4589989 B2 JP4589989 B2 JP 4589989B2 JP 2008174478 A JP2008174478 A JP 2008174478A JP 2008174478 A JP2008174478 A JP 2008174478A JP 4589989 B2 JP4589989 B2 JP 4589989B2
- Authority
- JP
- Japan
- Prior art keywords
- dust
- current
- value
- collection container
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Filters For Electric Vacuum Cleaners (AREA)
- Cyclones (AREA)
- Electric Vacuum Cleaner (AREA)
- Filtering Of Dispersed Particles In Gases (AREA)
Description
このサイクロン集塵装置は,比較的大きい塵埃を旋回させることで遠心力によって捕集し,空気流に乗って飛翔する比較的小さい塵埃については,空気流中においたフィルタ手段によって捕集するものであるため,騒音が少なく,集塵効率についても改善されたものである。
あるいは,塵埃を捨てる時に,塵埃が空気中で分散され,ごみ箱等に廃棄する際,塵埃が舞い散って再飛散することによる不快感を解消することが出来るといった,多くの長所が発揮される。
そのため上記モータなどの過負荷を検知してモータを停止させるなどの処理とすることが望ましいが,実際には,モータが過負荷になる前に使用者に警報を発するなどの事前の対応を行うことが,モータへの過負荷を防止してモータの寿命を延ばすといった点から望ましい。
さらに,モータが過負荷になる前に実質的な捕集物の量を検知して使用者に警報を発するなどの処理をすることが望ましいが,捕集物の量は捕集容器の中で偏在するので単純にはその量を正確に測定することは困難である。
そのため,本発明の発明者は,鋭意努力の末,モータ電流と捕集対象物の量との間に技術的な関係があることを突き止め,これにより捕集物の量を間接的に且つ正確に検知することができることを見出した。
内周面が略円筒状の捕集容器を備え,該捕集容器の円周部にその周方向に設けられた空気流入口から吸い込まれた空気を前記略円筒状の内周面に沿って旋回させた後,前記捕集容器の中心部からフィルタ手段を経て排気することにより,前記空気に含まれる比較的大きい捕集対象物を前記捕集容器の底部で捕集すると共に,比較的小さい捕集対象物を前記フィルタ手段において捕集するサイクロン分離装置であって,
前記捕集容器内に,該捕集容器の垂直中心軸を中心とする螺旋状曲面を備え,前記垂直中心軸の周りに回転可能な圧縮部材と,
前記捕集容器の内面の一部に設けられ,前記捕集容器内面の一部について他の部分と較べて捕集対象物に対する摩擦係数を変化させることで前記圧縮部材の回転に伴って該圧縮部材に押されて回転しようとする前記捕集容器内面に蓄積された捕集対象物の回転を抑制する回転抑制手段と,
前記圧縮部材を前記垂直中心軸周りに回転駆動する圧縮部材駆動手段の電流を検知する電流検知手段と,
前記電流検知手段による電流の検知結果に基づいて,当該サイクロン分離装置を制御する制御手段とを備えてなるサイクロン分離装置である。
前記回転抑制手段は具体的には,前記捕集容器内面の一部貼り付けられたゴム片であったり,あるいは,前記捕集容器内面の一部の内面に形成された凹凸が好ましい例としてあげられる。
前記制御手段は,前記電流検知手段の検知結果に基づいて蓄積された塵埃の量を推定し
,圧縮部材駆動手段が過負荷になる前に警報を発する。例えば,圧縮部材駆動手段の電流値に関する閾値として予め定められた第1の閾値を記憶する電流値記憶手段を備え,前記電流検知手段による電流の検知結果が前記電流値記憶手段に記憶された前記第1の閾値を超えた場合に,前記制御手段が,使用者に対して警報を発するようにすることが望ましい。
さらに,電流値記憶手段が,更に,前記第1の閾値よりも大きい第2の閾値を予め記憶しており,前記電流検知手段による電流の検知結果が前記第2の閾値を超えた場合に,前記制御手段が,使用者に対して警報を発すると共に,当該サイクロン分離装置の運転を停止するようにすれば,圧縮部材駆動手段の過負荷は完全に防止される。
前記電流の検知結果,前記第1及び前記第2の閾値として,周期的に変化する電流の最大値と最小値との差に基づく値を採用することができる。
また,前記電流の検知結果,前記第1及び前記第2の閾値として,周期的に変化する電流のピーク値間の周期に基づく値を採用することも有益である。
更にまた,前記電流の検知結果,前記第1及び前記第2の閾値が,前記電流検知手段の検知電流についての所定時間の平均値又は検知電流の変動周期の1周期若しくは複数周期の平均値に基づく値であってもよい。
当該サイクロン分離装置の具体例として,捕集対象物を塵埃とするサイクロン集塵装置が挙げられる。
本発明はこの現象を捉えて,上記回転抑制部材の部分を通過するときに増大する圧縮部材駆動手段電流の変化に基づき捕集容器内に蓄積された塵埃の量を推定し,圧縮部材駆動手段の過負荷を適切に防止することができる。
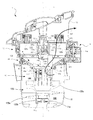
ここに,図1は,本発明の実施の形態に係る電気掃除機Xの外観図,図2及び図3は,本発明の実施の形態に係るサイクロン集塵装置Yの内部構造を説明するための断面図,図4は,本発明の実施の形態に係るサイクロン集塵装置Yに設けられた螺旋状回転圧縮部を説明するための図((a)は,下方から見た斜視図,(b)は,上方から見た斜視図),図5は,本発明の実施の形態に係るサイクロン集塵装置Yに設けられた上部フィルタユニット13を説明するための図,図6は,本発明の実施の形態に係るサイクロン集塵装置Yの内部構造を螺旋状回転圧縮部を中心として説明するための断面図,図7は,本発明の実施の形態に係るサイクロン集塵装置Yの内部構造を説明するための分解斜視図,図8は,本発明の実施の形態に係るサイクロン集塵装置Yの螺旋状回転圧縮部への回転力伝達経路を説明するための断面図,図9は,螺旋状回転圧縮部の回転によって,塵埃が圧縮・積層される状況を説明するサイクロン集塵装置Yの断面図,図10は,回転抑制手段の取付位置を説明するための集塵容器部分の断面図,図11は,本発明の実施形態にかかるサイクロン集塵装置Yの制御装置を示すブロック図,図12は,本発明の実施形態にかかるサイクロン集塵装置Yの制御装置に処理手順を示すフローチャート,図13は,駆動部の電流変化を示すグラフである。
図1に示すように,前記電気掃除機Xは,掃除機本体部1,吸気口部2,接続管3,接続ホース4,操作ハンドル5などを備えて概略構成されている。前記掃除機本体部1には,電動送風機221,サイクロン集塵装置Y,制御装置Zなどが内蔵されている。なお,前記サイクロン集塵装置Yについては後段で詳述する。
前記電動送風機221は,吸気を行うための送風ファン及び該送風ファンを回転駆動する送風駆動モータを有している。前記制御装置Zの詳細は,図11を参照して追って説明されるが,制御装置Zは,CPUやRAM,ROMなどの制御機器を有してなり,前記電気掃除機Xを統括的に制御する。具体的には,前記制御装置Zでは,前記CPUが前記ROMに記憶された制御プログラムに従って,本発明の対象である圧縮部材の回転制御を含む各種の処理を実行する。
なお,前記操作ハンドル5には,ユーザが前記電気掃除機Xの稼働の有無や運転モードの選択操作などを行うための操作スイッチ(不図示)が設けられている。また,その操作スイッチの近傍には,前記電気掃除機Xの現在の状態を表示するLEDなどの表示部(不図示)も設けられている。
従って,前記電気掃除機Xでは,前記掃除機本体部1に内蔵された前記電動送風機221が作動されることにより,前記吸気口部2からの吸気が行われる。そして,前記吸気口部2から吸気された空気は,前記接続管3及び前記接続ホース4を通じて前記サイクロン集塵装置Yに流入する。前記サイクロン集塵装置Yでは,吸い込まれた空気から塵埃が遠心分離される。前記サイクロン集塵装置Yで塵埃が分離された後の空気は,前記掃除機本体部1の後端に設けられた不図示の排気口から排気される。
図2及び図3に示すように,前記サイクロン集塵装置Yは,筐体10,内周面が略円筒状で,上記筐体10に対して着脱自在の集塵容器11(捕集容器の一例),内筒12,上部フィルタユニット13,塵埃受部14及び除塵駆動機構15などを備えて概略構成されている。除塵駆動機構15は,本発明の構成要素である後述のモータなどの圧縮部材駆動手段を含んでいる。
前記サイクロン集塵装置Yでは,前記集塵容器11,前記内筒12,前記上部フィルタユニット13,及び前記塵埃受部14が,垂直の中心軸Pを中心に同軸状に配置されている。また,前記サイクロン集塵装置Yは,前記掃除機本体部1に着脱可能に構成されている。
上記筐体10は,フィルタ122を備えた内筒12を備えている。
このサイクロン集塵装置Yでは,略円筒状の集塵容器11の中心部に設けられた前記内筒12から前記集塵容器11内の空気を排気することにより,前記集塵容器11の円周部に設けられた空気流入口111a(図7参照)から吸い込まれた空気を集塵容器11の内周面に沿って旋回させた後,前記上部フィルタユニット13などを経て前記内筒12を経て排気し,前記空気に含まれる比較的大きい捕集対象物を前記集塵容器11の底部で捕集すると共に,比較的小さい捕集対象物を前記上部フィルタユニット13などにおいて捕集するものである。
集塵容器11の内面には,後述の圧縮部材の回転に伴って該圧縮部材に押されて回転しようとする前記捕集容器11内面に蓄積された塵埃の回転を抑制する後述の回転抑制手段が形成されている。詳細は追って述べる。
また,前記集塵容器11の底部には,前記内筒12に設けられた後述の回転軸部123bに嵌合する嵌合部11aが設けられている。前記嵌合部11aの外周部には,前記内筒12の回転軸部123bとの隙間を埋めるための環状のシール部材11bが設けられている。このシール部材11bにより,前記回転軸部123b及び前記集塵容器11の間の空気の漏れが防止される。
ここで,前記接続部111の前記集塵容器11への空気流入口(不図示)は,前記接続ホース4からの空気が前記集塵容器11内で旋回するように形成されている。具体的に,前記空気流入口(不図示)は,前記集塵容器11側の出口が該集塵容器11の円周方向に向くように形成されている。
従って,前記集塵容器11では,吸い込まれた空気を旋回させることで該空気に含まれた比較的大きい塵埃が遠心力によって分離(遠心分離)される。そして,前記集塵容器11で遠心分離された塵埃は,該集塵容器11の底部に蓄積される(図2,3の塵埃D1)。
一方,塵埃が分離された後の空気は,前記集塵容器11から矢印(図2)で示す排気経路112に沿って前記掃除機本体部1に設けられた不図示の排気口から外部に排気される。ここで,前記集塵容器11から前記排気口(不図示)までの前記排気経路112上には,前記内筒12,前記塵埃受部14,及び前記上部フィルタユニット13が順に配置されている。
さらに,前記内筒12の上端には,後述の傾斜除塵部材134に設けられた係合部134cに係合する複数の連結部12bが設けられている。前記連結部12bは,前記内筒12の上端の開口縁部に上方に突出して設けられたリブである。
前記内筒12は,前記連結部12b及び前記係合部134cの係合によって,前記傾斜除塵部材134に一体回転可能に連結されている。これにより,前記内筒12は,前記傾斜除塵部材134に連動して回転することになる。なお,前記内筒12及び前記傾斜除塵部材134の連結構造はこれに限られない。例えば,前記内筒12及び前記傾斜除塵部材134各々に設けられた嵌合部を嵌合させることにより一体回転可能に連結する構成が考えられる。
例えば,前記内筒フィルタ122は,メッシュ状のエアフィルタ等である。なお,前記内筒フィルタ122は,前記内筒排気口121の内側又は外側のいずれに設けられていてもよい。また,前記排気口121及び前記内筒フィルタ122に換えて,前記内筒12にメッシュ状の孔を形成する構成も考えられる。その場合は,そのメッシュ状の孔が前記内筒排気口121及び前記内筒フィルタ122として機能する。
前記螺旋状回転圧縮部123の斜視図である図4を参照しつつ,前記螺旋状回転圧縮部123について説明する。
図2〜4に示されているように,前記螺旋状回転圧縮部123には,螺旋部123a,回転軸部123b,円盤状遮蔽部材123cが設けられている。
前記回転軸部123bは,前記集塵容器11の底部に設けられた前記嵌合部11aに嵌合される中空円筒である。前述したように,前記回転軸部123b及び前記嵌合部11aの間には前記シール部材11b(図2,3参照)が介在する。
さらに,前記内筒12が回転されるとき,前記螺旋状部123aの「螺子の運び作用」によって,集塵容器11の底部まで移動した塵埃に対して前記螺旋部123aは,前記集塵容器11の底部との摩擦によって,上記底面との間で塵埃を回転により回転軸中心から外側に向かって押し出し圧縮することになる。このような構成によれば,塵埃が回転によって固く圧縮されるので,前記集塵容器11の塵埃の蓄積可能量を増加させることができる。従って,例えば前記集塵容器11の小型化を実現することが可能である。また,固く圧縮された塵埃は,容易に解けないので,取り出し時にも空気中に飛散する問題がなく,そのままの形で塵埃として廃棄することが出来る。
ここで,図2及び図3に加えて図5を参照しつつ,前記上部フィルタユニット13について説明する。ここに,図5(a)は,前記上部フィルタユニット13を上方から見た斜視図,図5(b)は,前記上部フィルタユニット13を下方から見た斜視図である。
前記上部フィルタユニット13は,HEPAフィルタ(High Efficiency Particulate Air Filter)131,フィルタ除塵部材132及び傾斜除塵部材134などを有している。
前記HEPAフィルタ131は,前記垂直中心軸Pの周りに環状に配置固定された複数枚のフィルタの集合で構成されている。なお,複数枚のフィルタ各々は,例えば図5(b)に示すような骨組みに固定される。また,前記HEPAフィルタ131に含まれた複数枚のフィルタは,略水平方向に凹凸を繰り返すプリーツ状に配置されている。これにより,前記HEPAフィルタ131におけるフィルタ面積が十分に確保されている。なお,前記HEPAフィルタ131の下端と前記筐体10との間には,環状のシール部材162が設けられている。これにより,前記HEPAフィルタ131と前記筐体10との間の空気の漏れが防止される。
また,図2及び図3に示すように,前記HEPAフィルタ131の中央には,後述のフィルタ除塵部材132に設けられた連結部133が嵌挿される中空部131aが形成されている。また,前記中空部131aには,前記連結部133を回転可能に支持する支持部131bが設けられている。
但し,前記HEPAフィルタ131に塵埃が堆積して目詰まりが生じると,空気の通過抵抗が大きくなる。そのため,前記電動送風機221の負荷が大きくなり吸塵力が低下するおそれがある。そこで,前記上部フィルタユニット13には,前記HEPAフィルタ131に付着した塵埃を除去する前記フィルタ除塵部材132が設けられている。
また,前記連結部133には,該連結部133に設けられたネジ穴133aに前記傾斜除塵部材134がネジ133bで螺着される。これにより,前記フィルタ除塵部材132及び前記傾斜除塵部材134が一体回転可能に連結される。なお,前記傾斜除塵部材134及び前記HEPAフィルタ131の間には,隙間を埋める環状のシール部材163が設けられている。これにより,前記傾斜除塵部材134及び前記HEPAフィルタ131の間の空気の漏れが防止される。
そして,前記フィルタ除塵部材132には,その外周部にギア132bが形成されている。このギア132bは,図2及び図3に示すように,前記サイクロン集塵装置Yに設けられた除塵駆動機構15に設けられたギア15aに噛合される。
そして,上記フィルタ除塵部材132の回転は,前記したように,傾斜除塵部材134に伝達され,傾斜除塵部材134と一体に回転する内筒12及び内筒12と一体の螺旋状回転圧縮部123が前記垂直中心軸Pの周りに回転する。
なお,本実施の形態では,前記除塵駆動モータによって前記フィルタ除塵部材132が回転される場合を例に挙げて説明するが,前記除塵駆動モータに換えて,前記フィルタ除塵部材132を手動で回転させることのできる機構を設けることも他の実施例として考えられる。
さらに,除塵駆動モータ以外の別のモータによって,螺旋状回転圧縮部123を回転させることも当然考えられる。上部フィルタユニット13の除塵と,螺旋状回転圧縮部123の回転とを別に行いたい場合には,このような別駆動の方を採用することも考えられる。
前述したように,サイクロン集塵装置Yは,概略円筒形状に形成され,上部に配置された上部フィルタユニット13と,下部に配置された集塵容器11とを備えて構成されている。
集塵容器11内に収納された前記内筒12の下端には,分離部104と集塵部105の境界部である円盤状遮蔽部材123cが一体的に接合されている。上記円盤状遮蔽部材123cとその下部の前記螺旋部123aの外径は,ほぼ同じで,分離部104の内径より小さく,円盤状遮蔽部材123cの外周と集塵容器11の内壁との間には隙間(クリアランス)106(図6)が存在している。隙間(クリアランス)106は,分離部104において分離した塵埃を集塵部105へ移動する場合に,ある程度の体積を持つ塵埃においてもスムーズに移動することができ,かつ一度集塵部105に移動・蓄積した塵埃を巻き上げ,内筒フィルタ122を詰まらさないようにするに適した値である。実験によれば13mm程度が望ましいことが分かった。
但し,底面側の回転抑制手段53だけでは,塵埃の大きいかたまりに対して回転を抑制することができないので,側面側の背の高い回転抑制手段54も必要である。
前記回転抑制手段53,54は,前記集塵容器11の内面の一部について他の部分と較べて捕集対象物である塵埃に対する摩擦係数を変化させるものが採用される。
具体的な前記回転抑制手段53,54の一例は,前記捕集容器内面の一部に貼り付けられたゴム片であっても良い。
或いは,前記回転抑制手段53,54は,前記集塵容器11の内面の一部の内面に形成された凹凸形状であってもよい。例えば,前記集塵容器11の内面の一部に,おろし板状のギザギザが形成されており,これによって集塵容器11の内面に堆積した塵埃が引っかかって,前記螺旋部123aが回転することで塵埃が押されて回転しようとするのを抑制する。この回転抑制手段53,54によって塵埃が集塵容器11の内面に固定される傾向が強くなり,前記螺旋部123aに塵埃が押しつぶされて,塵埃の圧縮が更に促進される。
このように回転抑制手段53,54は,塵埃の圧縮に寄与するものであるが,さらに後述するように,集塵容器11内に蓄積された塵埃の量を正確に検知するためにも役立つが,この機能については追って説明する
図3,図6に示すように,分離部104の周方向に形成された接続部111の空気流入口111aから集塵容器11の分離部104に入った気流は,図6の矢印Aのように,分離部104の円筒状の内周面に沿って高速で旋回する。旋回気流中の比較的大きい塵埃には遠心力が作用して気流から分離され,集塵容器11の内壁へ押し付けられる。図2に示すように,空気の排気口121が,下方にあるため,その後,気流は旋回しながら,集塵部105に入る。図6において二点鎖線で示す矢印Aのように旋回する気流(主流)は,集塵部105の底面に到達した後は上昇に転じる。図6の例では,この螺旋状回転圧縮部123のまわりの間隙107を旋回する気流の回転方向と螺旋状回転圧縮部123の螺旋部123aの傾き方向が一致しており,サイクロン旋回気流を妨げることがない。このため,圧力損失が少なく効率的な遠心分離が可能であり,高い吸い込み仕事率が得られる。
前述したように,吸引された塵埃は,分離部104において分離され,隙間106(図6)を通り,集塵部105へ導かれる。集塵部105においては,塵埃は隙間107を通り,隙間108によりせき止められる(トラップされる)ことにより,蓄積される。この蓄積は,螺旋状回転圧縮部123が回転されるごとに既に蓄積された塵埃の上に積層されていく。そのため,この集塵装置では,螺旋部123aに沿って,偏ることなく積層が成長していくため,集塵部105内で偏って蓄積されていくことがなく,同容積の集塵部と比較して集塵可能容量が飛躍的に向上する。
また,螺旋部123aは,サイクロン旋回気流の回転方向に沿って下方に向かって傾斜する方向性をもつ螺旋形状とすることが出来る。この場合には,サイクロンの気流による圧縮効果も得られる。これにより,さらに集塵可能容量が向上する。
たとえば,送風駆動モータの駆動が停止されると,気流が旋回を止める。送風駆動モータの駆動停止が確認された後,除塵駆動機構15が駆動されると,上述したように内筒12,排気口121,円盤状遮蔽部材123c,螺旋状回転圧縮部123,回転軸部123bが一体となって,垂直中心軸Pを中心として,図8の矢印D方向(上面から見て,反時計方向)に回転する。このようにして,除塵駆動機構15による回転が,図8に示される第1の回転軸線152と第2の回転軸線153を介して回転軸部123bに伝達される。
こうして螺旋状回転圧縮部123が回転すると,螺子の原理により,回転軸方向(図9の矢印Eで示す垂直下向き方向)に推力が発生する。この推力により,集塵部105に蓄積されている図9の塵埃200は,回転軸方向に押し出され,集塵容器11の底面に押し付けられることにより回転軸方向に圧縮される。
そのため,除塵駆動モータが過負荷となる前に停止させ,或いはそれより更に以前に過負荷の可能性があることを使用者に警告するような表示をすることが望ましい。但し,除塵駆動モータ自体の負荷は,徐々に増加するものではなく,ある量を超えると急激に増加する傾向があるため,事前に察知することが難しい。
そこで本発明者は,鋭意研究したところ,前記駆動モータの電流値の変化と駆動モータの負荷との間に関係があることを理解するに至った。
図12は,前記集塵容器11底部の一部分に摩擦係数の高い部分を作ったり,塵埃が引っかかるぎざぎざを作った集塵容器11を用いて,塵埃の蓄積と圧縮動作を行った場合の上記駆動モータの電流測定値の変化を示すグラフである。縦軸が電流値,横軸が時間である。
例1の波形は収納された塵埃の量が少ないときの例であり平均電流Aaの値が小さく,電流うねりの振幅Saも小さい。また電流変動の周期Taは短い。これは圧縮が少なく圧縮駆動部の負荷が小さく回転遅れを生じていないためである。
一方,例2は収納された塵埃の量が多いときの例であり,平均電流Abや電流うねりの振幅Sbが大きくなっている。また圧縮時の負荷が大きくなり圧縮体1駆動部が回転遅れを生じるため周期Tbが長くなっている。
このような蓄積された塵埃の量に応じて平均電流Abや電流うねりの振幅Sb,あるいはうねりの周期Tbが変化するという現象から,本発明者は,これらの電気量を電流検知部227(本発明の電流検知手段の一例)で検知することで,蓄積された塵埃の量を間接的に検出することができることに気がついたのであり,本発明は,このような知見に基づいて創作されたものである。即ち上記のような駆動モータ(圧縮部材駆動手段の一例)の電流値に関するデータを予め定めた所定の閾値と比較し,その比較結果に応じて,警告や集塵機の停止処理をすることで駆動モータの過負荷を防止することができる。
前記制御回路220内の記憶部が,更に,前記第1の閾値よりも大きい第2の閾値を予め記憶しており,電流検知部227による電流の検知結果が前記第2の閾値を超えた場合に,前記制御装置Zが,表示部224やブザー部225を用いて使用者に対して警報を発すると共に,当該サイクロン集塵装置の運転を停止することで駆動モータの過負荷を完全に防止しうるようにしてもよい。
223は電源部であり制御回路部220等へ電源を供給する。224は表示部であり運転状態あるいは異常時の表示等を行う。225はブザーであり異常時に警報を発する。226は前記螺旋状圧縮部123の駆動部であり,具体的には前記のように除塵駆動モータ等で構成され,前記螺旋状回転圧縮部123を回転させる。駆動部226の電流は電流検知部227で検知され,後述のようにこの電流値によって前記螺旋状圧縮部123の駆動部の電流を検知し,集塵容器11内における塵埃の溜まり状態を検知する。駆動部226が,本発明における圧縮部材駆動手段の一例である。
手元スイッチ206には運転スイッチ(強,中,弱等)及び停止スイッチがあり,通常は,その操作により制御回路部220に信号が入力されるとその信号に応じて制御装置Zは,電動送風機221を制御する。制御装置Zは,電動送風機221の運転中に周期的に駆動部226を回転させて,圧縮動作をし,掃除機の運転中に,後述の方法で塵埃量を検知することも可能である。また掃除機の運転が停止されたときに塵埃量を検知することも可能である。また,圧縮動作のみの操作も可能である。塵埃の検知は通電されているあらゆるタイミングで実施することができる。また,塵埃満杯を検知した後に警報を出したり電動送風機221の運転を停止したりする制御も可能である。
掃除機が運転されると,吸引された塵埃と空気が吸入部を通って集塵容器に入ってくる。前述のようにサイクロンの特性により塵埃のうち比較的大きいものは集塵容器11の底面に蓄積する。
図13に示すように,電動送風機221が停止後,駆動部226がONされ,螺旋状回転圧縮部123が時計方向に回転駆動され,集塵容器11内の塵埃が螺旋状回転圧縮部123の最下部に押される圧縮動作が行われる(N10でYes)。
集塵容器11の底面及び側面には,前記のように回転抑制手段53,54が設けられているので,螺旋状圧縮部123の最下部に押された塵埃は回転抑制手段53,54で回転にブレーキが掛けられる結果,この回転抑制手段53,54付近で急激に圧縮される。
その結果,螺旋状圧縮部123の最下部が上記回転制御部53,54に近づくと駆動モータの負荷が大きくなり電流Aあるいは電流うなり振幅Sが大きくなるとともに回転速度が遅くなり電流うなりの周期Tは長くなる。前記電流検知部227は,このような電流の変化を検知することができ,前記回転抑制手段53,54の存在により圧縮効果が高くなるとともに電流うなりSが大きくなり,このデータによって塵埃量検知を精度よく検知することが可能となった。この圧縮体2は塵埃収納部の底部あるいは壁面のどちらにあっても良いし両方にあっても良い。
圧縮動作時の検知電流の電流値のうなり幅がS,をあるいは電流うなり周期がT,あるいは平均電流がAが,予め設定された所定の閾値を超えた場合(図13では電流うねりSが所定の設定値1を超えた場合)(N20で設定値1以上),駆動部226の負荷が駆動部226にとって過負荷となる前の状態であると推定するが,上記うねり値Sが,上記設定値1(第1の閾値)以上であって,かつ上記設定値1より大きい設定値2(第2の閾値)以下(N30でNo)の場合,駆動モータを停止するほどではないが,かなりの塵埃が溜まっていると判断して,即ち,塵埃捨てタイミングと判断して表示部224にLED表示による,あるいはブザー部225によりブザー音等による報知を行う(N40)。また電流のうねりSが上記設定値1(第1の閾値)以上であって,かつ上記設定値1より大きい設定値2(第2の閾値)以上である(N30でYes)場合には,上記警報の出力と共に駆動モータを停止する(N50)ことで,駆動モータの過負荷を完全に防止する。
更に電動送風機221を動かし塵埃の吸引を行った後に同様に圧縮動作と電流検知を行い,上記と同様に電流値A,電流のうねり幅S,あるいはうねり周期Tが予め定められた所定の閾値を超えるかあるいはこれらの組み合わせにて圧縮限界と判断したときは圧縮動作を停止し,駆動モータの過負荷防止をはかってもよい。
11…集塵容器(捕集容器)
12…内筒
13…上部フィルタユニット
14…集塵受部
15…除塵駆動機構
104…分離部
105…集塵部
123…螺旋状回転圧縮部
123a…螺旋部(圧縮部)
123b…回転軸部
220…制御回路部
221…電動送風機
222…駆動回路部
226…駆動部
227…電流検知部
Claims (9)
- 内周面が略円筒状の捕集容器を備え,該捕集容器の円周部にその周方向に設けられた空気流入口から吸い込まれた空気を前記略円筒状の内周面に沿って旋回させた後,前記捕集容器の中心部からフィルタ手段を経て排気することにより,前記空気に含まれる比較的大きい捕集対象物を前記捕集容器の底部で捕集すると共に,比較的小さい捕集対象物を前記フィルタ手段において捕集するサイクロン分離装置であって,
前記捕集容器内に,該捕集容器の垂直中心軸を中心とする螺旋状曲面を備え,前記垂直中心軸の周りに回転可能な圧縮部材と,
前記捕集容器の内面の一部に設けられ,前記捕集容器内面の一部について他の部分と較べて捕集対象物に対する摩擦係数を変化させることで前記圧縮部材の回転に伴って該圧縮部材に押されて回転しようとする前記捕集容器内面に蓄積された捕集対象物の回転を抑制する回転抑制手段と,
前記圧縮部材を前記垂直中心軸周りに回転駆動する圧縮部材駆動手段の電流を検知する電流検知手段と,
前記電流検知手段による電流の検知結果に基づいて,当該サイクロン分離装置を制御する制御手段とを備えてなるサイクロン分離装置。 - 前記回転抑制手段が,前記捕集容器内面の一部に貼り付けられたゴム片である請求項1に記載のサイクロン分離装置。
- 前記回転抑制手段が,前記捕集容器内面の一部の内面に凹凸が形成されたことである請求項1に記載のサイクロン分離装置。
- 前記圧縮部材駆動手段の電流値に関する閾値として予め定められた第1の閾値を記憶する電流値記憶手段を備え,前記電流検知手段による電流の検知結果が前記電流値記憶手段に記憶された前記第1の閾値を超えた場合に,前記制御手段が,使用者に対して警報を発する請求項1〜3のいずれかに記載のサイクロン分離装置。
- 前記電流値記憶手段が,更に,前記第1の閾値よりも大きい第2の閾値を予め記憶しており,前記電流検知手段による電流の検知結果が前記第2の閾値を超えた場合に,前記制御手段が,使用者に対して警報を発すると共に,当該サイクロン分離装置の運転を停止する請求項4に記載のサイクロン分離装置。
- 前記電流の検知結果が,周期的に変化する電流値に基づく値あるいは電流の最大値と最小値との差に基づく値である請求項4或いは5のいずれかに記載のサイクロン分離装置。
- 前記電流の検知結果が,周期的に変化する電流のピーク値間の周期に基づく値である請求項4或いは5のいずれかに記載のサイクロン分離装置。
- 前記電流の検知結果が,前記電流検知手段の検知電流についての所定時間の平均値又は検知電流の変動周期の1周期若しくは複数周期の平均値に基づく値である請求項4或いは5のいずれかに記載のサイクロン分離装置。
- 当該サイクロン分離装置が,捕集対象物を塵埃とするサイクロン集塵装置である請求項1〜8のいずれかに記載のサイクロン分離装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008174478A JP4589989B2 (ja) | 2008-07-03 | 2008-07-03 | サイクロン分離装置 |
| CN200910159465A CN101617929A (zh) | 2008-07-03 | 2009-07-02 | 旋风分离装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008174478A JP4589989B2 (ja) | 2008-07-03 | 2008-07-03 | サイクロン分離装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010012410A JP2010012410A (ja) | 2010-01-21 |
| JP4589989B2 true JP4589989B2 (ja) | 2010-12-01 |
Family
ID=41511474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008174478A Expired - Fee Related JP4589989B2 (ja) | 2008-07-03 | 2008-07-03 | サイクロン分離装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4589989B2 (ja) |
| CN (1) | CN101617929A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210148832A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| KR20210148831A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| KR20210148830A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| US20230180979A1 (en) * | 2020-06-01 | 2023-06-15 | Lg Electronics Inc. | Cleaner |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5881558B2 (ja) * | 2012-08-24 | 2016-03-09 | シャープ株式会社 | 電気掃除機 |
| EP3981308B1 (en) | 2019-06-05 | 2025-11-12 | LG Electronics Inc. | Vacuum cleaner |
| CN113273925B (zh) * | 2020-02-03 | 2023-12-29 | 朱圣铉 | 真空清洁器的集尘装置 |
| KR102185964B1 (ko) * | 2020-02-03 | 2020-12-03 | 주성현 | 진공 청소기의 집진장치 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54114366U (ja) * | 1978-01-31 | 1979-08-11 | ||
| JPH04370030A (ja) * | 1991-06-14 | 1992-12-22 | Kubota Corp | 脱穀装置の除塵構造 |
| JP4640542B2 (ja) * | 2000-12-27 | 2011-03-02 | 有限会社吉工 | サイクロン |
| JP2003070698A (ja) * | 2001-09-07 | 2003-03-11 | Toshiba Tec Corp | 電気掃除機 |
| JP3788589B2 (ja) * | 2001-09-20 | 2006-06-21 | シャープ株式会社 | 電気掃除機 |
| JP4066718B2 (ja) * | 2002-06-07 | 2008-03-26 | 松下電器産業株式会社 | 電気掃除機 |
| JP2004283344A (ja) * | 2003-03-20 | 2004-10-14 | Toshiba Tec Corp | 電気掃除機とその運転方法 |
| JP2005013312A (ja) * | 2003-06-24 | 2005-01-20 | Matsushita Electric Ind Co Ltd | 電気掃除機 |
| JP4115481B2 (ja) * | 2005-12-14 | 2008-07-09 | シャープ株式会社 | 電気掃除機 |
| EP1839758B1 (en) * | 2006-02-24 | 2009-11-25 | LG Electronics Inc. | Dust collector and vacuum cleaner |
| EP1859719B1 (en) * | 2006-05-23 | 2014-03-12 | LG Electronics Inc. | Vacuum cleaner and controlling method of the same |
-
2008
- 2008-07-03 JP JP2008174478A patent/JP4589989B2/ja not_active Expired - Fee Related
-
2009
- 2009-07-02 CN CN200910159465A patent/CN101617929A/zh active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210148832A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| KR20210148831A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| KR20210148830A (ko) | 2020-06-01 | 2021-12-08 | 엘지전자 주식회사 | 청소기 |
| US20230180979A1 (en) * | 2020-06-01 | 2023-06-15 | Lg Electronics Inc. | Cleaner |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101617929A (zh) | 2010-01-06 |
| JP2010012410A (ja) | 2010-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4589989B2 (ja) | サイクロン分離装置 | |
| JP5237770B2 (ja) | サイクロン分離装置 | |
| JP4750164B2 (ja) | サイクロン分離装置 | |
| JP4798637B2 (ja) | 集塵装置および電気掃除機 | |
| JP2010081968A (ja) | サイクロン分離装置 | |
| JP2010035771A (ja) | サイクロン分離装置 | |
| JP2010004909A (ja) | サイクロン分離装置 | |
| WO2009116611A1 (ja) | サイクロン分離装置 | |
| JP2009285415A (ja) | 電気掃除機 | |
| JP6867991B2 (ja) | 電気掃除機 | |
| JP5031807B2 (ja) | サイクロン分離装置 | |
| JP4378420B2 (ja) | サイクロン分離装置 | |
| JP4890621B2 (ja) | サイクロン分離装置 | |
| JP5101457B2 (ja) | サイクロン分離装置 | |
| JP4478191B2 (ja) | サイクロン分離装置 | |
| JP5177814B2 (ja) | 集塵装置および電気掃除機 | |
| JP4856271B2 (ja) | サイクロン分離装置 | |
| JP4871416B2 (ja) | サイクロン分離装置 | |
| JP5070127B2 (ja) | サイクロン分離装置 | |
| JP5184428B2 (ja) | サイクロン分離装置 | |
| JP5122406B2 (ja) | サイクロン分離装置 | |
| JP2018008154A (ja) | 電気掃除機 | |
| JP7365484B2 (ja) | 電気掃除機 | |
| JP5066282B2 (ja) | サイクロン分離装置 | |
| JP2015006623A (ja) | サイクロン分離装置、電気掃除機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100817 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100910 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130917 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |