JP4528294B2 - 走行型ドーザ除雪機 - Google Patents
走行型ドーザ除雪機 Download PDFInfo
- Publication number
- JP4528294B2 JP4528294B2 JP2006318870A JP2006318870A JP4528294B2 JP 4528294 B2 JP4528294 B2 JP 4528294B2 JP 2006318870 A JP2006318870 A JP 2006318870A JP 2006318870 A JP2006318870 A JP 2006318870A JP 4528294 B2 JP4528294 B2 JP 4528294B2
- Authority
- JP
- Japan
- Prior art keywords
- snow
- traveling
- dozer
- crawler
- working
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Cleaning Of Streets, Tracks, Or Beaches (AREA)
Description
この走行型ドーザ除雪機は、左右のクローラ走行部で前進走行しながら排雪板で雪を押すことにより除雪作業をおこなうものである(例えば、特許文献1参照。)。
排雪板のエッジを路面(雪面)にくい込ませることで、多くの雪を排雪板で一度に押すことができ、作業性を高めることが可能である。
牽引力を確保するために、走行型ドーザ除雪機の車体重量を重くして、走行型ドーザ除雪機と路面(雪面)との摩擦を高め、走行型ドーザ除雪機の牽引力を確保している。
このため、走行型ドーザ除雪機を軽量にして、走行型ドーザ除雪機を引きずり易くする必要がある。
このため、走行型ドーザ除雪機の牽引力が抑えられ、除雪性能を良好に確保することが難しい。
下端部が摩耗すると、下端部を位置決め手段でクローラ走行部の下面と同じ高さに位置決めすることはできない。
そこで、請求項2において、位置決め手段に、作業部を支える支え部を有し、この支え部の高さを調整可能にした。
そこで、請求項3において、ハンドルから連なるスイング部材の前部に作業部を取り付けた。そして、スイング部材を揺動自在に支持し、揺動支持位置を、クローラ走行部の起動輪および遊転輪間の中央位置よりも車体後方位置とした。
これにより、下向きの押付力を牽引力として効率よく利用することが可能になる。
よって、作業部の下端部が路面(雪面)に必要以上にくい込むことを防止することができ、くい込みにより従来ロスしていた力をクローラ走行部に効率よく伝えることができる。
したがって、走行型ドーザ除雪機の軽量化を図るとともに、除雪性能を良好に確保することができるという利点がある。
加えて、請求項1に係る発明では、保持機構を備えた。よって、除雪作業時において、作業部の下端部をクローラ走行部の下面と同じ高さに位置決めした位置に作業部を保持することができる。
これにより、走行型ドーザ除雪機の操作性をさらに高めることができるという利点がある。
よって、例えば、修理や部品交換の際に、作業部の下端部がクローラ走行部の下面と同じ高さになるように調整することができる。
これにより、走行型ドーザ除雪機の使い勝手をさらに高めることができるという利点がある。
よって、作業者がハンドルを下向きに押し付けることで、左右のクローラ走行部と路面(雪面)との摩擦を高めることができる。
したがって、必要に応じて走行型ドーザ除雪機に大きな牽引力を付与することができ、走行型ドーザ除雪機の除雪性能をさらに高めることができるという利点がある。
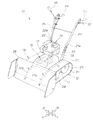
走行型ドーザ除雪機10は、機体11の左右側にそれぞれ左右のクローラ走行部12,13を備え、左右のクローラ走行部12,13の回転方向を切り換える回転方向切換装置15を備え、回転方向切換装置15を覆うカバー17を備え、回転方向切換装置15に走行クラッチ18を介して回転を伝えるエンジン19を備え、機体11の左右側に左右のスイングパイプ(スイング部材)21,22をスイング自在に備え、左右のスイングパイプ21,22の後端部21a,22aに左右のハンドル(ハンドル)24,25をそれぞれ備え、左右のスイングパイプ21,22の前端部21b,22bに排雪板(作業部)26を備え、排雪板26を位置決めする位置決め手段27(図2参照)を備える。
右クローラ走行部13は、左クローラ走行部12と左右対称の部材であり、構成部材に同一符号を付して説明を省略する。
エンジン19の回転は、走行クラッチ18、回転方向切換装置15およびファイナルドライブ機構32を介して左右のクローラ走行部12,13に伝達される。
このカバー17は、機体11に取り付けられている。
機体11は、矩形状の枠体に形成され、前部11aに位置決め手段27を備える。
位置決め手段27は、前部11aの左側部11bに設けられた左ストッパ部材71と、前部11aの右側部11cに設けられた右ストッパ部材72を備える。
なお、位置決め手段27については図6で詳しく説明する。
この左スイングパイプ21は、水平部41の後端41aに取付部材43が設けられ、取付部材43が支持軸44を介して機体11に回動自在に取り付けられている。
よって、取付部材43は、支持軸44にブッシュ45を介して回動自在に支持される。これにより、左スイングパイプ21が、支持軸44を介して機体11に回動自在に取り付けられる。
左ハンドル24は、後端部に左グリップ51を備え、左グリップ51の近傍に走行クラッチレバー52が設けられている。
走行クラッチレバー52は、走行クラッチ18(図1参照)を接続状態と遮断状態とに切り換えるレバーである。
右ハンドル25は、後端部に右グリップ54を備え、右グリップ54の近傍に前後進切換レバー55が設けられている。
前後進切換レバー55は、回転方向切換装置15(図1参照)の一部を構成する部材である。
排雪板26は、排雪板本体75と、排雪板本体75の下部75aに設けられたエッジ(排雪板の下端部)76とを備える。
すなわち、排雪板26は、左右のハンドル24,25から連なる左右のスイングパイプ21,22の前傾斜部(前部)46,46に取り付けられている。
左スイングパイプ21は、前述したように、水平部41の後端41aに取付部材43が設けられている。
取付部材43は、下端部43aにブッシュ45(図7も参照)が固定されている。このブッシュ45が支持軸44に回動自在に嵌合されている。
これにより、排雪板26の下端部76a(すなわち、エッジ76の下端部76a)を、図4に示す作業位置P1と、図5に示す回送位置P2とに位置決めすることができる。
左右のグリップ51,54を下方に押し下げることで、左右のスイングパイプ21,22が支持軸44,44を支点にして時計回り方向に揺動する。左右のスイングパイプ21,22が時計回り方向に揺動することで排雪板26が矢印Bの如く上昇する。
左右のグリップ51,54を持ち上げることで、左右のスイングパイプ21,22が支持軸44,44を支点にして反時計回り方向に揺動する。左右のスイングパイプ21,22が反時計回り方向に揺動することで排雪板26が矢印Dの如く下降する。
起動輪28および遊転輪29間の中央位置81とは、起動輪28の中心と遊転輪29の中心との間隔L1の中央位置をいう。
なお、支持軸44を、起動輪28および遊転輪29間の中央位置81よりも車体後方位置に支持した理由は図9で詳しく説明する。
位置決め手段27の左ストッパ部材71は、左スイングパイプ21を載置する位置決めボルト83と、位置決めボルト83を機体11に固定する上下のナット84,84とを有する。
位置決めボルト83は、頭部(支え部)85を上側に配置した状態で左取付孔88にねじ部86が差し込まれている。左取付孔88は、機体11の前部11aの左側部11bに形成されている。
上下のナット84,84は、それぞれねじ部86にねじ結合されている。
上下のナット84,84で左側部11bを挟持することで、位置決めボルト83が左側部11bに取り付けられる。
この右ストッパ部材72は、左ストッパ部材71と同様に、位置決めボルト83が右取付孔89に差し込まれた状態で右側部11cに取り付けられている。
左側部11bは、右側部11cに対して左右対称の部位である。
よって、排雪板26の下端部76aが路面(雪面)にくい込むことを防止することができる。
なお、排雪板26の下端部76aが路面(雪面)にくい込むことを防止する理由は図8で詳しく説明する。
同様に、右側の位置決めボルト83は、上下のナット84,84を緩めて、ナット84,84による右側部11cの挟持状態を解除することで、頭部85の高さH1を調整することができる。
さらに、エッジ76の下端部76aが路面(雪面)にくい込まないように接触して摩耗した場合に、頭部85の高さH1を調整することで、摩耗した下端部76aを左右のクローラ走行部12,13の下面12a,13aと同じ高さに調整することができる。
保持機構91は、機体11に回動自在に支持された保持バー92と、保持バー92の略中央部に取り付けられた係合突起93と、保持バー92の前端部92aおよびブラケット94に掛け渡された引張ばね95と、ブッシュ45に固定されたスイングプレート96とを備える。
ブラケット94は、機体11の中央部材14に固定されている。中央部材14は、機体11の前後方向略中央に設けられている。
前後の係合凹部98,99は、係合突起93の略下半部が係合可能に形成された凹みである。
(a)に示すように、左右のスイングパイプ21,22が略水平に配置されたとき、左右側の水平部41,41の前端部41b,41bが、位置決めボルト83,83の頭部85,85にそれぞれ載置される。
後係合凹部99が係合突起93に嵌合される。保持バー92の前端部92aには、引張ばね95により下向きの押下力が矢印の如く作用している。
これにより、排雪板26の下端部76aが、図4に示すように、左右のクローラ走行部12,13のそれぞれの下面12a,13aと同じ高さに位置決めされ、排雪板26が作業位置P1に保持される。
左クローラ走行部12および左クローラ走行部12の下面12aは図2に示す。
これにより、引張ばね95のばね力に抗して後係合凹部99が係合突起93から抜け出す。このとき、保持バー92は、支持ピン97を支点にして上方に回動する。
保持バー92の前端部92aには、引張ばね95により下向きの押下力が作用している。
左右のグリップ51,54に継続して押上力をかけることで、左右側の水平部41,41の前端部41b,41bが、位置決めボルト83,83の頭部85,85に載置される。
これにより、走行型ドーザ除雪機10の操作性をさらに高めることができる。
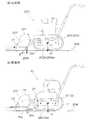
図8(a),(b)は本発明に係る走行型ドーザ除雪機の排雪板を路面(雪面)にくい込ませないで作業をおこなう例を説明する図である。
(a)に通常の走行型ドーザ除雪機200を比較例として示し、(b)に図1〜図7で説明した走行型ドーザ除雪機10を実施例として示す。
すなわち、比較例の走行型ドーザ除雪機200は、排雪板201を路面(雪面)204にくい込ませながら除雪作業をおこなうものである。
すなわち、実施例の走行型ドーザ除雪機10は、排雪板を路面(雪面)にくい込ませないようにしながら除雪作業をおこなうものである。
排雪板201の下端部201aが路面(雪面)204にくい込んでいる。このため、下端部201aと路面(雪面)204とに摩擦力(すなわち、抵抗)Rが矢印の如く作用する。
R=Wd×μs
但し、μs:排雪板201と路面(雪面)204との摩擦係数
F1=W×μc−R
となる。
但し、W:走行型ドーザ除雪機200の車体重量
μc:左右のクローラ走行部205,205と路面(雪面)204との摩擦係数
排雪板26の下端部76aが路面(雪面)204にくい込んでいない。よって、下端部76aと路面(雪面)204とに摩擦力(すなわち、抵抗)Rが発生しない。
F2=W×μc+Wd×μc
=(W+Wd)×μc
となる。
但し、W:走行型ドーザ除雪機10の車体重量
μc:左右のクローラ走行部12,13と路面(雪面)204との摩擦係数
F2>F1
となる。
これにより、走行型ドーザ除雪機10を軽量にした場合でも、排雪板26で雪202を押しながら走行型ドーザ除雪機10を前進させる牽引力F2を十分に確保することができる。
このため、通常の走行型ドーザ除雪機200では、除雪作業中に、排雪板201の下端部201aを、左右のクローラ走行部205,205の下面205a,205aと同じ高さに位置決めすることは難しい。
(a)に通常の走行型ドーザ除雪機200を比較例として示し、(b)に図1〜図7で説明した走行型ドーザ除雪機10を実施例として示す。
比較例の走行型ドーザ除雪機200は排雪板201の(揺動)支持軸207が機体208の前端部に設けられている。
実施例の走行型ドーザ除雪機10は排雪板26の(揺動)支持軸44が機体11の後端部に設けられている。
F1=W×μc−R
である。
Wh1×L3≦Wd×L2
よって、作業者が左右のグリップ211,212に作用させることが可能な最大押下力Wh1は、
Wh1=Wd×(L2/L3)
である。
但し、L2:押下力Wdが作用する位置と支持軸207との間隔
L3:押下力Wh1が作用する位置と支持軸207との間隔
F3=F1+Wh1×μc
=(W+Wh1)×μc−R
となる。
このため、押下力Wh1を大きく確保することはできない。
よって、左右のグリップ211,212に押下力Wh1を作用させても、走行型ドーザ除雪機200の牽引力F3を大きくすることはできない。
F2=(W+Wd)×μc
である。
Wh2×L5≦Wd×L4
よって、作業者が左右のグリップに51,54に作用させることが可能な最大押下力Wh2は、
Wh2=Wd×(L4/L5)
但し、L4:押下力Wdが作用する位置と支持軸44との間隔
L5:押下力Wh2が作用する位置と支持軸44との間隔
である。
F4=F2+Wh2×μc
=(W+Wd+Wh2)×μc
となる。
これにより、押下力Wh2を大きく確保することができる。
よって、除雪作業中に必要に応じて、左右のグリップ51,54に押下力Wh2を作用させることで、左右のクローラ走行部12,13と路面(雪面)204との摩擦を高めることができる。
したがって、例えば、除雪作業中に、左右のクローラ走行部12,13がスリップしそうになった場合でも牽引力F4を確保して、走行型ドーザ除雪機10の除雪性能をさらに高めることができる。
Claims (3)
- 機体の左右側に左右のクローラ走行部をそれぞれ備え、前記機体の前方に作業部を備え、前記機体の後方にハンドルを備え、前記左右のクローラ走行部で前進走行しながら前記作業部で除雪作業をおこなう歩行型ドーザ除雪機において、
前記作業部の下端部を、除雪作業時において、前記クローラ走行部の下面と同じ高さに位置決めする位置決め手段と、
前記クローラ走行部の下面と同じ高さに位置決めした位置に前記作業部を保持する保持機構と、を備え、
前記保持機構は、
前記機体に回動自在に支持された保持バーと、前記保持バーの略中央部に取り付けられた係合突起と、前記係合突起が係合可能に形成された係合凹部を有するスイングプレートと、前記係合凹部に前記係合突起を係合状態に保持するために前記保持バーの端部および前記機体に掛け渡された引張ばねと、を備え、
前記引張ばねで係合凹部に前記係合突起を係合状態に保持することにより、前記クローラ走行部の下面と同じ高さに位置決めした位置に前記作業部を保持することを特徴とする走行型ドーザ除雪機。 - 前記位置決め手段は、前記作業部を支える支え部を有し、この支え部の高さを調整可能としたことを特徴とする請求項1記載の走行型ドーザ除雪機。
- 前記作業部は、前記ハンドルから連なるスイング部材の前部に取り付けられ、
このスイング部材は、前記クローラ走行部の起動輪および遊転輪間の中央位置よりも車体後方位置で揺動自在に支持されたことを特徴とする請求項1または請求項2記載の走行型ドーザ除雪機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006318870A JP4528294B2 (ja) | 2006-11-27 | 2006-11-27 | 走行型ドーザ除雪機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006318870A JP4528294B2 (ja) | 2006-11-27 | 2006-11-27 | 走行型ドーザ除雪機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008133603A JP2008133603A (ja) | 2008-06-12 |
| JP4528294B2 true JP4528294B2 (ja) | 2010-08-18 |
Family
ID=39558638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006318870A Expired - Fee Related JP4528294B2 (ja) | 2006-11-27 | 2006-11-27 | 走行型ドーザ除雪機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4528294B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014091945A (ja) * | 2012-11-02 | 2014-05-19 | Sasaki Corporation | 歩行型ブレード除雪機 |
| JP2014095269A (ja) * | 2012-11-12 | 2014-05-22 | Sasaki Corporation | 歩行型ブレード除雪機 |
| JP7103855B2 (ja) | 2018-06-11 | 2022-07-20 | ニューデルタ工業株式会社 | 歩行型農作業機 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101595494B1 (ko) * | 2013-12-13 | 2016-02-19 | 김용석 | 제설장치 |
| JP6970966B2 (ja) * | 2017-11-21 | 2021-11-24 | 株式会社ササキコーポレーション | 除雪機 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5130378B2 (ja) * | 1973-04-04 | 1976-08-31 | ||
| JPS5134109Y2 (ja) * | 1973-06-01 | 1976-08-24 | ||
| JPS5712022Y2 (ja) * | 1977-08-24 | 1982-03-10 | ||
| JPS5592716U (ja) * | 1978-12-18 | 1980-06-26 | ||
| JP2516368Y2 (ja) * | 1991-12-27 | 1996-11-06 | 本田技研工業株式会社 | ドーザ付作業機 |
| JP3814064B2 (ja) * | 1997-11-07 | 2006-08-23 | セイレイ工業株式会社 | 除雪機 |
| JP2002021034A (ja) * | 2000-07-12 | 2002-01-23 | Honda Motor Co Ltd | 排雪板付き除雪機 |
-
2006
- 2006-11-27 JP JP2006318870A patent/JP4528294B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014091945A (ja) * | 2012-11-02 | 2014-05-19 | Sasaki Corporation | 歩行型ブレード除雪機 |
| JP2014095269A (ja) * | 2012-11-12 | 2014-05-22 | Sasaki Corporation | 歩行型ブレード除雪機 |
| JP7103855B2 (ja) | 2018-06-11 | 2022-07-20 | ニューデルタ工業株式会社 | 歩行型農作業機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008133603A (ja) | 2008-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4097829B2 (ja) | 除雪機 | |
| JP4528294B2 (ja) | 走行型ドーザ除雪機 | |
| JP3896748B2 (ja) | フロントロータリ耕耘装置 | |
| JP2009118753A (ja) | 歩行型電動管理機 | |
| JP4205253B2 (ja) | 除雪機 | |
| CN203710658U (zh) | 滑冰车的刹车装置 | |
| JP2017115305A (ja) | 除雪機 | |
| JP5234935B2 (ja) | 除雪機 | |
| JP5032966B2 (ja) | 除雪機 | |
| JP2009001095A (ja) | 作業車両 | |
| JP2013217185A (ja) | 除雪機 | |
| JP6128582B2 (ja) | 歩行型ブレード除雪機 | |
| JP2021055301A (ja) | 転圧車両 | |
| JP2516368Y2 (ja) | ドーザ付作業機 | |
| JP6970966B2 (ja) | 除雪機 | |
| JP2009046947A (ja) | 排雪機の操作装置 | |
| JP2007099159A (ja) | クローラ走行装置 | |
| JP4481532B2 (ja) | 除雪機の高低調節装置 | |
| JP2004324062A (ja) | 除雪機の走行装置 | |
| JP2005299157A (ja) | 除雪機 | |
| JP2004108105A (ja) | 除雪機の傾動調節機構 | |
| JP2004190360A (ja) | 除雪機の高低調節装置 | |
| JP2601965B2 (ja) | ドーザ付作業機 | |
| JP4527014B2 (ja) | 歩行型作業機 | |
| JP2007126860A (ja) | 除雪機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100601 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100604 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4528294 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130611 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140611 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |