JP4456998B2 - 速度センサおよびそれを用いた対地車速センサ - Google Patents
速度センサおよびそれを用いた対地車速センサ Download PDFInfo
- Publication number
- JP4456998B2 JP4456998B2 JP2004378770A JP2004378770A JP4456998B2 JP 4456998 B2 JP4456998 B2 JP 4456998B2 JP 2004378770 A JP2004378770 A JP 2004378770A JP 2004378770 A JP2004378770 A JP 2004378770A JP 4456998 B2 JP4456998 B2 JP 4456998B2
- Authority
- JP
- Japan
- Prior art keywords
- speed sensor
- sensor
- antenna
- signal
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q15/00—Devices for reflection, refraction, diffraction or polarisation of waves radiated from an antenna, e.g. quasi-optical devices
- H01Q15/02—Refracting or diffracting devices, e.g. lens, prism
- H01Q15/08—Refracting or diffracting devices, e.g. lens, prism formed of solid dielectric material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/60—Velocity or trajectory determination systems; Sense-of-movement determination systems wherein the transmitter and receiver are mounted on the moving object, e.g. for determining ground speed, drift angle, ground track
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/03—Details of HF subsystems specially adapted therefor, e.g. common to transmitter and receiver
- G01S7/032—Constructional details for solid-state radar subsystems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q19/00—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic
- H01Q19/06—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic using refracting or diffracting devices, e.g. lens
- H01Q19/062—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic using refracting or diffracting devices, e.g. lens for focusing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/50—Systems of measurement, based on relative movement of the target
- G01S15/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S15/60—Velocity or trajectory determination systems; Sense-of-movement determination systems wherein the transmitter and receiver are mounted on the moving object, e.g. for determining ground speed, drift angle, ground track
Description
まず、本発明の速度センサは、移動可能な物体に設置されるよう構成され、波動の性質を有する送信信号を放射し、その送信信号が対象物により反射することによって生じる反射信号を受信し、受信した反射信号と送信信号とから、上記の移動可能な物体と上記の対象物との間の相対速度を算出するのに必要な信号を生成して出力することを特徴とする。ここで、送信信号はビーム形状を成し、そのビーム形状は、対象物近傍でのビーム幅が速度センサの送信信号を放射するための放射口近傍でのビーム幅と比べてほぼ等しいかまたは小さくなるように形成される。さらに、送信信号は、移動可能な物体の対象物に対する相対速度方向と所定の角度を成す方向に放射口から放射され、その所定の角度は、0度より大きく90度より小さいかまたは90度より大きく180度より小さいかのいずれかの任意の角度である。

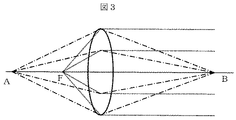
また、本発明の速度センサおよびそれを用いた対地車速センサが放射する電磁波のビーム形状は、センサ近傍でのビーム幅に対して地面近傍でのビーム幅が小さくなるビーム形状であれば種々の形状のものを適用可能であり、そのいずれのビーム形状を形成する場合にも、上記の装置構成は有効である。
なお、以上の実施例では、誘電体レンズが2枚の場合を用いて説明したが、誘電体レンズが3枚以上の複数枚であっても同様の効果が得られることは言うまでもない。また、同等のビーム形状を得るために、誘電体レンズ以外に、大口径アンテナ、アンテナアレー、パラボラアンテナ、または、これらの組合せを用いてもよいことは、上述した通りである。
なお、以上においては、誘電体レンズを2個使用する例として本実施例を説明したが、誘電体レンズを3個以上使用する場合や、パラボラアンテナやアレーアンテナと誘電体レンズとを組み合わせて使用する場合でも、少なくとも同等の効果が得られることは言うまでもない。
また、上述した各実施例の構成を適宜組み合わせることにより、少なくとも各実施例から得られる効果が総合された効果が得られることは言うまでもない。
2 誘電体レンズ
3 センサ回路部
4 ビーム
5 車体
6 地面
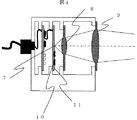
7 アンテナ
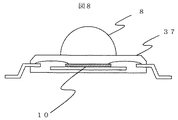
8 第一の誘電体レンズ
9 第二の誘電体レンズ
10 MMIC
11 高周波基板
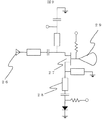
12 発振器
13 混合器
14 送信アンテナ
15 受信アンテナ
16 電力増幅器
17 低雑音増幅器
18 A/Dコンバータ
19 信号処理におけるFFTのステップ
20 信号処理における信号検出ステップ
21 信号処理における速度計算のステップ
22 信号処理装置
23 ICパッケージ
26 送受信アンテナ
27 FET
28 オープンスタブ
29 ラジアルスタブ
30 第三の誘電体レンズ
31 ドップラーセンサ
32 側壁
33 支柱
34 マウント台
35 調整機構
36 分配器
37 樹脂モールドパッケージ
38 金属筐体
39 距離センサ
40 制御装置。
Claims (4)
- 移動可能な物体に設置されるよう構成された速度センサであって、
波動の性質を有する送信信号を生成し、該送信信号が対象物により反射することによって生じる反射信号を受信し、受信した前記反射信号と前記送信信号とから、前記移動可能な物体と前記対象物との間の相対速度を算出するのに必要な信号を生成して出力するセンサ回路部と、
該センサ回路部により生成された送信信号の放射角度を変更するためのレンズと
を具備して成り、
前記センサ回路部は、基板と、該基板に搭載された集積回路装置と、該集積回路装置と電気的に接続され、前記送信信号を放射する送信アンテナと、前記集積回路装置と電気的に接続され、前記反射信号を受信するための受信アンテナとを具備して成り、
前記送信信号は電磁波であり、前記レンズは前記電磁波の焦点距離を変更可能に構成された誘電体レンズであり、
前記誘電体レンズは、第1の誘電体レンズと、該第1の誘電体レンズとは別体として設けられた第2の誘電体レンズとを含んで構成され、
前記第1および第2の誘電体レンズのうち少なくとも一方の前記速度センサ内における位置を調整する調整機構を更に具備して成り、
前記送信信号はビーム形状を成し、該ビーム形状は、前記対象物近傍でのビーム幅が前記速度センサの前記送信信号を放射するための放射口近傍でのビーム幅と比べてほぼ等しいかまたは小さくなるように前記レンズによって形成され、
前記送信信号は、前記移動可能な物体の前記対象物に対する相対速度方向と所定の角度を成す方向に前記放射口から放射され、前記所定の角度は、0度より大きく90度より小さいかまたは90度より大きく180度より小さいかのいずれかの任意の角度であり、
前記送信アンテナおよび前記受信アンテナのうちの少なくとも一方は、前記センサ回路部を構成する能動回路と共に同一の半導体基板上にモノリシックに形成され、
前記半導体基板は樹脂モールドパッケージにより実装され、
前記第1の誘電体レンズは、前記樹脂モールドパッケージ上に一体形成されている
ことを特徴とする速度センサ。 - 請求項1において、
前記電磁波はマイクロ波帯からミリ波帯域の電磁波である
ことを特徴とする速度センサ。 - 請求項1または2のいずれかにおいて、
前記送信アンテナおよび前記受信アンテナのうちの少なくとも一方は、パラボラ形状の側壁を具備して成る
ことを特徴とする速度センサ。 - 請求項1乃至3のいずれかにおいて、
前記対象物と前記速度センサとの間の距離に関する情報を含んだ信号に基づいて前記調整機構を制御する制御装置を更に具備して成る
ことを特徴とする速度センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004378770A JP4456998B2 (ja) | 2004-12-28 | 2004-12-28 | 速度センサおよびそれを用いた対地車速センサ |
| EP05017796A EP1677126A1 (en) | 2004-12-28 | 2005-08-16 | Doppler-velocity-sensor for a vehicle with focused beam |
| US11/207,004 US7310061B2 (en) | 2004-12-28 | 2005-08-19 | Velocity sensor and ground vehicle velocity sensor using the same |
| US11/984,571 US7532153B2 (en) | 2004-12-28 | 2007-11-20 | Velocity sensor and ground vehicle velocity sensor using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004378770A JP4456998B2 (ja) | 2004-12-28 | 2004-12-28 | 速度センサおよびそれを用いた対地車速センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006184144A JP2006184144A (ja) | 2006-07-13 |
| JP2006184144A5 JP2006184144A5 (ja) | 2007-07-19 |
| JP4456998B2 true JP4456998B2 (ja) | 2010-04-28 |
Family
ID=36177824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004378770A Active JP4456998B2 (ja) | 2004-12-28 | 2004-12-28 | 速度センサおよびそれを用いた対地車速センサ |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US7310061B2 (ja) |
| EP (1) | EP1677126A1 (ja) |
| JP (1) | JP4456998B2 (ja) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8471757B2 (en) * | 2004-08-19 | 2013-06-25 | Electronic Navigation Research Institute, An Independent Administrative Institution | Device using dielectric lens |
| JP4456998B2 (ja) * | 2004-12-28 | 2010-04-28 | 日立オートモティブシステムズ株式会社 | 速度センサおよびそれを用いた対地車速センサ |
| JP4286855B2 (ja) * | 2006-09-07 | 2009-07-01 | 株式会社日立製作所 | レーダ装置 |
| JP4294670B2 (ja) * | 2006-09-15 | 2009-07-15 | シャープ株式会社 | 無線通信装置 |
| US20080180336A1 (en) * | 2007-01-31 | 2008-07-31 | Bauregger Frank N | Lensed antenna methods and systems for navigation or other signals |
| EP2144080B1 (en) * | 2007-04-02 | 2020-03-18 | National Institute of Information and Communications Technology | Microwave/millimeter wave sensor apparatus |
| DE102007034329A1 (de) * | 2007-07-24 | 2009-01-29 | Robert Bosch Gmbh | Radarvorrichtung |
| DE102007036262A1 (de) * | 2007-08-02 | 2009-02-05 | Robert Bosch Gmbh | Radarsensor für Kraftfahrzeuge |
| US8115673B1 (en) * | 2007-08-11 | 2012-02-14 | Mcewan Technologies, Llc | Self-oscillating UWB emitter-detector |
| US8022861B2 (en) * | 2008-04-04 | 2011-09-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | Dual-band antenna array and RF front-end for mm-wave imager and radar |
| CN102204084B (zh) * | 2008-09-26 | 2014-10-15 | 独立行政法人情报通信研究机构 | 微波/毫米波通信装置 |
| JP5761585B2 (ja) * | 2008-10-07 | 2015-08-12 | 国立研究開発法人情報通信研究機構 | パルスレーダ装置 |
| JP5565823B2 (ja) * | 2008-10-07 | 2014-08-06 | 独立行政法人情報通信研究機構 | パルス信号発生装置 |
| US8378759B2 (en) * | 2009-01-16 | 2013-02-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | First and second coplanar microstrip lines separated by rows of vias for reducing cross-talk there between |
| US8786496B2 (en) | 2010-07-28 | 2014-07-22 | Toyota Motor Engineering & Manufacturing North America, Inc. | Three-dimensional array antenna on a substrate with enhanced backlobe suppression for mm-wave automotive applications |
| US20120154239A1 (en) * | 2010-12-15 | 2012-06-21 | Bridgewave Communications, Inc. | Millimeter wave radio assembly with a compact antenna |
| US8441394B2 (en) * | 2011-07-11 | 2013-05-14 | Delphi Technologies, Inc. | System and method for detecting obstructions and misalignment of ground vehicle radar systems |
| US10305196B2 (en) * | 2012-04-17 | 2019-05-28 | Keyssa, Inc. | Dielectric lens structures for EHF radiation |
| JP6121680B2 (ja) * | 2012-10-05 | 2017-04-26 | 日立オートモティブシステムズ株式会社 | レーダモジュールおよびそれを用いた速度計測装置 |
| US8854257B2 (en) * | 2012-10-22 | 2014-10-07 | The United States Of America As Represented By The Secretary Of The Army | Conformal array, luneburg lens antenna system |
| JP2014155098A (ja) * | 2013-02-12 | 2014-08-25 | Nitto Denko Corp | アンテナモジュールおよびその製造方法 |
| JP5941854B2 (ja) | 2013-02-13 | 2016-06-29 | 日立オートモティブシステムズ株式会社 | ミリ波誘電体レンズアンテナおよびそれを用いた速度センサ |
| DE102013105789B3 (de) * | 2013-06-05 | 2014-11-13 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Kollimator für elektromagnetische Hochfrequenzstrahlung |
| JP6371510B2 (ja) * | 2013-09-30 | 2018-08-08 | 日野自動車株式会社 | 車載レーダの軸調整装置及び軸調整方法 |
| DE102016120665B3 (de) | 2016-10-28 | 2018-04-05 | Silicon Radar GmbH | Radarsensoreinheit zum Einsatz in rauen Umgebungen |
| US10756441B2 (en) * | 2017-02-21 | 2020-08-25 | Taoglas Group Holdings Limited | Radar lens antenna arrays and methods |
| US10976461B2 (en) * | 2017-10-17 | 2021-04-13 | California Institute Of Technology | Sub-surface imaging of dielectric structures and voids via narrowband electromagnetic resonance scattering |
| CN109839631B (zh) | 2017-11-27 | 2023-09-19 | 松下知识产权经营株式会社 | 雷达装置 |
| US10804615B2 (en) | 2017-11-27 | 2020-10-13 | Panasonic Intellectual Property Management Co., Ltd. | Radar device |
| WO2019119177A1 (zh) * | 2017-12-18 | 2019-06-27 | 深圳市大疆创新科技有限公司 | 弱目标检测方法、微波雷达传感器及无人机 |
| US10921447B2 (en) * | 2018-01-29 | 2021-02-16 | Rohm Co., Ltd. | Control circuit of light emitting and receiving device |
| FR3090893B1 (fr) * | 2018-12-20 | 2021-10-08 | Commissariat Energie Atomique | Procede et systeme de mesure de la vitesse d’un porteur par rapport au sol |
| HUE054958T2 (hu) * | 2019-02-04 | 2021-10-28 | Grieshaber Vega Kg | Antenna elrendezés |
| DE102019202144A1 (de) * | 2019-02-18 | 2020-08-20 | Vega Grieshaber Kg | Radarsensor für die Fabrik- und Logistikautomation |
| KR102588510B1 (ko) * | 2019-04-22 | 2023-10-12 | 현대자동차주식회사 | 차량용 안테나 시스템 및 그 제어 방법 |
| CN111862631B (zh) * | 2019-05-24 | 2022-07-29 | 北京骑胜科技有限公司 | 交通工具行驶检测方法、装置、电子设备及可读存储介质 |
| JP2019213222A (ja) * | 2019-09-05 | 2019-12-12 | パナソニックIpマネジメント株式会社 | 車両 |
| CN112924711B (zh) * | 2021-01-22 | 2023-08-11 | 香港中文大学(深圳) | 一种车速检测方法、装置及计算机可读存储介质 |
| US20230006346A1 (en) * | 2021-05-27 | 2023-01-05 | Tata Consultancy Services Limited | Computer controlled electromechanical mmw frequency antenna scanning system and beam steering thereof |
| EP4243205A1 (en) * | 2022-03-09 | 2023-09-13 | Vaisala, OYJ | An antenna for a radar apparatus |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR595085A (fr) * | 1924-01-19 | 1925-09-25 | Procédé et dispositifs pour la mesure et le contrôle de la vitesse d'un navire par les faisceaux dirigés d'ondes ultra-sonores | |
| US2834014A (en) * | 1950-02-16 | 1958-05-06 | Thorne Thomas George | Aerial systems |
| US3833906A (en) * | 1972-02-14 | 1974-09-03 | Midwest Microwave Inc | Doppler radar for land vehicles |
| US3852762A (en) * | 1973-11-14 | 1974-12-03 | Singer Co | Scanning lens antenna |
| DE2635952B2 (de) * | 1976-08-10 | 1978-11-16 | Siemens Ag, 1000 Berlin Und 8000 Muenchen | WegmeBsystem für streckengebundene Fahrzeuge unter Verwendung eines Doppier-Radargerätes |
| DE2951021A1 (de) * | 1979-12-19 | 1981-07-16 | Licentia Patent-Verwaltungs-Gmbh, 6000 Frankfurt | Anordnung zur bestimmung der eigengeschwindigkeit von fahrzeugen |
| US4517566A (en) * | 1982-09-07 | 1985-05-14 | John H. Bryant | True ground speed sensor |
| US4788553A (en) * | 1983-04-06 | 1988-11-29 | Trw Inc. | Doppler radar velocity measurement apparatus |
| US5206658A (en) * | 1990-10-31 | 1993-04-27 | Rockwell International Corporation | Multiple beam antenna system |
| GB2258965A (en) * | 1991-08-23 | 1993-02-24 | Marconi Gec Ltd | Doppler speed sensor |
| JPH07260931A (ja) | 1994-03-22 | 1995-10-13 | Aisin Seiki Co Ltd | 車載用超音波計測装置 |
| US5481268A (en) * | 1994-07-20 | 1996-01-02 | Rockwell International Corporation | Doppler radar system for automotive vehicles |
| DE29510212U1 (de) | 1995-04-03 | 1995-11-16 | Barnstorfer Kunststofftechnik | Vorrichtung zum Eingrenzen von Geflügel |
| JP3722544B2 (ja) | 1996-03-29 | 2005-11-30 | 株式会社小松製作所 | 車速検出装置 |
| US6230107B1 (en) * | 1996-03-29 | 2001-05-08 | Komatsu Ltd. | Vehicle speed detection system |
| JP3719202B2 (ja) * | 2001-11-30 | 2005-11-24 | 株式会社村田製作所 | レーダの特性調整方法 |
| JP2003232851A (ja) * | 2002-02-08 | 2003-08-22 | Murata Mfg Co Ltd | レーダおよびその特性調整方法 |
| JP2003240842A (ja) * | 2002-02-14 | 2003-08-27 | Murata Mfg Co Ltd | レーダ |
| JP2003294835A (ja) * | 2002-04-01 | 2003-10-15 | Murata Mfg Co Ltd | レーダ |
| JP4523223B2 (ja) | 2002-04-26 | 2010-08-11 | 株式会社日立製作所 | レーダセンサ |
| JP4456998B2 (ja) * | 2004-12-28 | 2010-04-28 | 日立オートモティブシステムズ株式会社 | 速度センサおよびそれを用いた対地車速センサ |
-
2004
- 2004-12-28 JP JP2004378770A patent/JP4456998B2/ja active Active
-
2005
- 2005-08-16 EP EP05017796A patent/EP1677126A1/en not_active Withdrawn
- 2005-08-19 US US11/207,004 patent/US7310061B2/en not_active Expired - Fee Related
-
2007
- 2007-11-20 US US11/984,571 patent/US7532153B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7310061B2 (en) | 2007-12-18 |
| US20060139206A1 (en) | 2006-06-29 |
| EP1677126A1 (en) | 2006-07-05 |
| US20080091380A1 (en) | 2008-04-17 |
| US7532153B2 (en) | 2009-05-12 |
| JP2006184144A (ja) | 2006-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4456998B2 (ja) | 速度センサおよびそれを用いた対地車速センサ | |
| US7154432B2 (en) | Radar sensor | |
| JP6121680B2 (ja) | レーダモジュールおよびそれを用いた速度計測装置 | |
| JP4497190B2 (ja) | レーダ装置、および保持部材 | |
| US5512901A (en) | Built-in radiation structure for a millimeter wave radar sensor | |
| US20070159380A1 (en) | Millimeter-wave radar apparatus and millimeter radar system using the same | |
| Scherr et al. | Miniaturized 122 GHz ISM band FMCW radar with micrometer accuracy | |
| US9274217B2 (en) | Microwave sensor having function of range gates | |
| US7884740B2 (en) | Multi-lane vehicle detection apparatus | |
| JP2009103457A (ja) | レーダ装置、および保持部材 | |
| JP2004325160A (ja) | 車載用レーダ | |
| EP1795914B1 (en) | RF transceiver module and millimeter-wave FMCW radar sensor using the same | |
| JP2008089614A (ja) | レーダセンサ | |
| JP5175348B2 (ja) | 車両のためのモノスタティック・マルチビームレーダセンサ | |
| JP2017212569A (ja) | アンテナ、センサ及び車載システム | |
| US20180335512A1 (en) | mm-Wave Radar Sensor for Distance Measurement in Short and Medium Range | |
| JP3764877B2 (ja) | レーダ装置 | |
| US10340605B2 (en) | Planar antenna device | |
| JP7207905B2 (ja) | レーダ装置 | |
| JPH1079616A (ja) | 車載用レーダアンテナ | |
| US20180284221A1 (en) | Radar apparatus | |
| JP6530260B2 (ja) | 速度計測装置、その取り付け方法、及びそれを取り付けた自動車 | |
| JPH06281685A (ja) | 電磁波吸収特性測定装置 | |
| JP3315927B2 (ja) | レーダ取付方向検出装置とその装置を用いたレーダ取付方向の調整方法 | |
| Descamps et al. | Microwave Doppler sensors for terrestrial transportation applications |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060425 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070529 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070529 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090623 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090724 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20091222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130212 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4456998 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130212 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140212 Year of fee payment: 4 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |