JP4447963B2 - 光偏向器制御装置 - Google Patents
光偏向器制御装置 Download PDFInfo
- Publication number
- JP4447963B2 JP4447963B2 JP2004162536A JP2004162536A JP4447963B2 JP 4447963 B2 JP4447963 B2 JP 4447963B2 JP 2004162536 A JP2004162536 A JP 2004162536A JP 2004162536 A JP2004162536 A JP 2004162536A JP 4447963 B2 JP4447963 B2 JP 4447963B2
- Authority
- JP
- Japan
- Prior art keywords
- optical deflector
- frequency
- light
- control device
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Mechanical Optical Scanning Systems (AREA)
- Facsimile Heads (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
(実施例1)
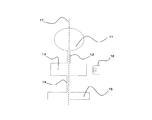
図1は本発明の光偏向器制御装置を含む光走査系の実施例を示すブロック図である。図1に示すように、本実施例の光走査系は、光偏向器31、変位角検知手段32、光偏向器制御装置51で構成される。図2には、光偏向器31の上面図を示した。図示のように、光偏向器31は、第1可動子11、第2可動子13とそれらを連結して弾性支持する第1ねじりバネ(弾性支持部)12、第2可動子13と機械的な支持体15を弾性支持する第2ねじりバネ(弾性支持部)14で構成されている。これら全ての要素(本発明では振動系と呼ぶ)は、ねじりバネ12、14で規定される1つのねじり軸17を中心として駆動手段16によりねじり振動される。また、第1可動子11は、光を偏向するための図示しない反射面を有しており、第1可動子11のねじり振動によって、反射面は光源からの光を偏向走査する。図2では、ねじりバネ12、14を直列的に設けているが、可動子と弾性支持部との連結の仕方、配置は、光偏向面について後記の式3の振動が或る振動軸の回りで起こるのであれば、どの様なものでもよい。
θ1=φ1sin[w0t] (式1)
であらわされる正弦振動である。
θ2=φ2sin[2w0t] (式2)
なる正弦振動である。
θ=θ1+θ2=φ1sin[w0t]+φ2sin[2w0t] (式3)
で表される鋸波状の振動となる。
θ”(t)=−φ 1 w 0 2 sin[w 0 t]−4φ 2 w 0 2 sin[2w 0 t]=0 (式4)
(t1,t2)=(w0(φ1+2φ2),−w0(φ1 2/(16φ2)+2φ2)) (式5)
θ’(t 1 ,w 0 ,φ 1 ,φ 2 )=V 1 (式6-1)
θ’(t 2 ,w 0 ,φ 1 ,φ 2 )=V 2 (式6-2)
本実施例の場合、特に以下のようになる。
(φ 1 ,φ 2 )=(2/(9w 0 ){4V 1 +2V 2 +[2(V 2 −V 1 )(V 1 +2V 1 )] 1/2 },
1/(18w 0 ){V 1 −4V 2 −2[2(V 2 −V 1 )(V 1 +2V 1 )] 1/2 }) (式7)
図8は本発明の光偏向器制御装置を含む光走査系の第2の実施例を示すブロック図である。本実施例では、第1の実施例と同一部分には、同一の符号を付し、説明を省略する。
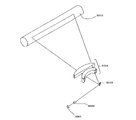
図9は上記光走査系を用いた光学機器の実施例を示す図である。ここでは光学機器として画像表示装置を示している。図9において、2006は、水平走査用光偏向器であり、投影面2005の水平方向に入射光を偏向走査する。一方、2001は本発明の光偏向器制御装置を含む光走査系であり、本実施例では、垂直方向に入射光を偏向走査する。2002はレーザ光源である。2003はレンズ或いはレンズ群であり、2004は書き込みレンズまたはレンズ群、2005は投影面である。レーザ光源2002から入射したレーザ光は、光の偏向走査のタイミングと関係した所定の強度変調を受けて光偏向器2006、光走査系2001により2次元的に走査される。この走査されたレーザ光は書き込みレンズ2004により投影面2005上に画像を形成する。
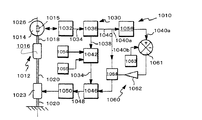
図10は上記光走査系を用いた光学機器の他の実施例を示す図である。ここでは、光学機器として画像形成装置を示している。図10において、3003は本発明の光偏向器制御装置を含む光走査系であり、本実施例では入射光を一次元に走査する。3001はレーザ光源である。3002はレンズあるいはレンズ群であり、3004は書き込みレンズ或いはレンズ群、3005は感光体である。レーザ光源3001から射出されたレーザ光は、光の偏向走査のタイミングと関係した所定の強度変調を受けて、光走査系3003により一次元的に走査される。この走査されたレーザ光は書き込みレンズ3004により、感光体3005上へ画像を形成する。感光体3005は図示しない帯電器により一様に帯電されており、この上に光を走査することによりその部分に静電潜像を形成する。次に、図示しない現像器により静電潜像の画像部分にトナー像を形成し、これを例えば図示しない用紙に転写・定着することで用紙上に画像が形成される。本発明の光偏向器制御装置により、光の偏向走査の角速度を仕様範囲内に設定することが可能となる。
12、14、24、24a、24b ねじりバネ(弾性支持部)
15、25、25a、25b 支持体
16 固定コイル(駆動手段)
23、23a、23b 可動子(偏向反射面)
31、311、2001、3003 光偏向器(光走査系)
37 演算回路
42、421 駆動回路(駆動手段)
51 光偏向器制御装置
2002、3001 光源
2005 投影面(画像表示体)
3005 感光体
Claims (8)
- 一方の周波数が他方の周波数の定数倍である比例関係にある互いに異なる周波数の正弦振動を行う2つの偏向反射面と、2つの該偏向反射面を駆動する駆動手段と、周波数検知回路と、を有し、2つの前記偏向反射面の正弦振動の重ね合わせにより光源からの光を偏向走査する光偏向器を制御する光偏向器制御装置であって、
前記光偏向器によって偏向走査される光の偏向走査の角速度のプリセットされた最大値と最小値および前記周波数検知回路から出力される前記互いに異なる周波数の正弦振動のいずれか1つの周波数から、2つの前記偏向反射面の正弦振動の最大振幅の制御目標値を決定する演算回路を有することを特徴とする光偏向器制御装置。 - 前記互いに異なる周波数は、一方の周波数が他方の周波数の2倍または3倍であることを特徴とする請求項1に記載の光偏向器制御装置。
- 偏向反射面を持つ可動子を含む2つ以上の可動子と、該可動子を連結する複数の弾性支持部と、該複数の弾性支持部の一部を支持する支持体で構成されて前記偏向反射面を一振動軸の回りに振動可能にするように構成された振動系と、
周波数検知回路と、
振動系の有する一方の周波数が他方の周波数の定数倍である比例関係にある2つの異なる固有振動モードで振動系を駆動する駆動手段と、を有し、
光源からの光を偏向走査する光偏向器を制御する光偏向器制御装置であって、
前記光偏向器によって偏向走査される光の偏向走査の角速度のプリセットされた最大値と最小値および前記周波数検知回路から出力される前記2つの異なる固有振動モードのいずれか1つの周波数から、前記偏向反射面の2つの固有振動モードの最大振幅の制御目標値を決定する演算回路を有することを特徴とする光偏向器制御装置。 - 前記2つの異なる固有振動モードの周波数は、一方の周波数が他方の周波数の2倍または3倍であることを特徴とする請求項3に記載の光偏向器制御装置。
- 光源と、光偏向器と、請求項1乃至4の何れか1つに記載の光偏向器制御装置とを有し、光偏向器は、光偏向器制御装置で制御され、光源からの光を光偏向器により偏向し、該光の少なくとも一部を画像表示体上に投影することを特徴とする画像表示装置。
- 光源と、光偏向器と、請求項1乃至4の何れか1つに記載の光偏向器制御装置と、感光体とを有し、光偏向器は、光偏向器制御装置で制御され、光源からの光を光偏向器により偏向し、該光の少なくとも一部を感光体上に入射することを特徴とする画像形成装置。
- 一方の周波数が他方の周波数の定数倍である比例関係にある互いに異なる周波数の正弦振動を行う2つの前記偏向反射面の正弦振動の重ね合わせにより光源からの光を偏向走査する光偏向器の制御方法であって、
前記光偏向器によって偏向走査される光の偏向走査の角速度の最大値と最小値をプリセットする第1の工程と、
前記互いに異なる周波数の正弦振動のいずれか1つの周波数を検知する第2の工程と、
前記第1の工程でプリセットした、偏向走査される光の偏向走査の角速度の最大値と最小値と、前記第2の工程で求めた周波数とから2つの前記偏向反射面の正弦振動の最大振幅の制御目標値を決定する工程と、を含むことを特徴とする光偏向器の制御方法。 - 偏向反射面を持つ可動子を含む2つ以上の可動子と、該可動子を連結する複数の弾性支持部と、該複数の弾性支持部の一部を支持する支持体で構成された振動系の前記偏向反射面を一振動軸の回りに振動させて光源からの光を偏向走査する光偏向器の制御方法であって、
前記光偏向器によって偏向走査される光の偏向走査の角速度の最大値と最小値をプリセットする第1の工程と、
前記振動系の有する一方の周波数が他方の周波数の定数倍である比例関係にある2つの異なる固有振動モードのいずれか1つの周波数を検知する第2の工程と、
前記第1の工程でプリセットした、偏向走査される光の偏向走査の角速度の最大値と最小値と、前記第2の工程で求めた周波数とから前記偏向反射面の2つの固有振動モードの最大振幅の制御目標値を決定する工程と、を含むことを特徴とする光偏向器の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004162536A JP4447963B2 (ja) | 2004-05-31 | 2004-05-31 | 光偏向器制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004162536A JP4447963B2 (ja) | 2004-05-31 | 2004-05-31 | 光偏向器制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005345574A JP2005345574A (ja) | 2005-12-15 |
| JP2005345574A5 JP2005345574A5 (ja) | 2007-07-19 |
| JP4447963B2 true JP4447963B2 (ja) | 2010-04-07 |
Family
ID=35498046
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004162536A Expired - Fee Related JP4447963B2 (ja) | 2004-05-31 | 2004-05-31 | 光偏向器制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4447963B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005083493A1 (ja) * | 2004-02-27 | 2005-09-09 | Matsushita Electric Industrial Co., Ltd. | 照明光源及びそれを用いた2次元画像表示装置 |
| DE202005021930U1 (de) | 2005-08-01 | 2011-08-08 | Corning Cable Systems Llc | Faseroptische Auskoppelkabel und vorverbundene Baugruppen mit Toning-Teilen |
| JP5441309B2 (ja) * | 2006-02-13 | 2014-03-12 | キヤノン株式会社 | 揺動体装置、及び光偏向装置 |
| JP5408887B2 (ja) * | 2008-03-12 | 2014-02-05 | キヤノン株式会社 | 揺動体装置、揺動体装置を用いた画像形成装置 |
| JP5341372B2 (ja) * | 2008-03-12 | 2013-11-13 | キヤノン株式会社 | 揺動体装置、揺動体装置を用いた画像形成装置 |
| JP5296428B2 (ja) * | 2008-06-20 | 2013-09-25 | キヤノン電子株式会社 | 光走査装置及び該光走査装置を用いた画像形成装置、及び画像読み取り装置とディスプレイ |
| JP5424995B2 (ja) * | 2010-06-24 | 2014-02-26 | キヤノン株式会社 | 光走査装置及び画像形成装置 |
| JP5572584B2 (ja) * | 2011-04-27 | 2014-08-13 | 京セラドキュメントソリューションズ株式会社 | 光走査装置及びこれを備えた画像形成装置 |
-
2004
- 2004-05-31 JP JP2004162536A patent/JP4447963B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005345574A (ja) | 2005-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4574396B2 (ja) | 光偏向器 | |
| KR100806015B1 (ko) | 마이크로요동체, 광편향기 및 화상형성장치 | |
| JP5064864B2 (ja) | 光偏向装置、画像形成装置、及び光偏向装置の駆動方法 | |
| JP4881073B2 (ja) | 光偏向器、及びそれを用いた光学機器 | |
| JP5170983B2 (ja) | 光偏向器、及びそれを用いた光学機器 | |
| JP2007322466A (ja) | 光偏向器、及びそれを用いた光学機器 | |
| JP2007316443A (ja) | 光偏向器、及びそれを用いた光学機器 | |
| JP5164345B2 (ja) | 光走査装置及びそれを用いた画像形成装置 | |
| US8254006B2 (en) | Oscillator device and optical deflector using the same | |
| JP4447963B2 (ja) | 光偏向器制御装置 | |
| JP7102705B2 (ja) | アクチュエーター、光学装置及びプロジェクター | |
| JP2009058616A (ja) | 揺動体装置、光偏向装置、及びそれを用いた画像形成装置 | |
| US20100085618A1 (en) | Oscillator device, optical deflecting device and method of controlling the same | |
| JP2008058752A (ja) | 光偏向装置、及びこれを用いた画像形成装置 | |
| JP2009025617A (ja) | 揺動体装置、光偏向器およびそれを用いた光学機器 | |
| JP5554895B2 (ja) | 揺動構造体、及び揺動構造体を用いた揺動体装置 | |
| JP2008299297A (ja) | 揺動体装置、及び揺動体装置の振動系の駆動制御方法 | |
| JP2008268879A (ja) | 揺動体装置、光偏向器、光偏向器を用いた画像形成装置 | |
| JP5341372B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP2005250077A (ja) | 光偏向器 | |
| JP2008170495A (ja) | 揺動体装置 | |
| JP2005326745A (ja) | 光偏向装置およびその制御方法 | |
| JP5084385B2 (ja) | ねじりバネ、光偏向器及びそれを用いた画像形成装置 | |
| JP5408887B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP2005326462A (ja) | 光偏向器およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070531 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080916 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091001 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100119 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100121 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130129 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140129 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |