JP5441309B2 - 揺動体装置、及び光偏向装置 - Google Patents
揺動体装置、及び光偏向装置 Download PDFInfo
- Publication number
- JP5441309B2 JP5441309B2 JP2007023881A JP2007023881A JP5441309B2 JP 5441309 B2 JP5441309 B2 JP 5441309B2 JP 2007023881 A JP2007023881 A JP 2007023881A JP 2007023881 A JP2007023881 A JP 2007023881A JP 5441309 B2 JP5441309 B2 JP 5441309B2
- Authority
- JP
- Japan
- Prior art keywords
- time
- oscillator
- vibration
- drive
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/085—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by electromagnetic means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/04—Optical MEMS
- B81B2201/042—Micromirrors, not used as optical switches
Description
第1の揺動体と、第2の揺動体と、第1の揺動体と第2の揺動体とを接続する第1のねじりバネと、第2の揺動体に接続され且つ第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネとを少なくとも有し構成される振動系と、振動系を支持する支持部とを備える。本発明の揺動体装置は、更に前記揺動体の少なくとも一つが複数の時間関数の和を含む式で表される振動となるように振動系を駆動する駆動部と、前記揺動体の少なくとも一つの揺動体の変位に応じて信号を出力する信号出力器と、信号出力器の出力信号に基づいて時間関数の振幅と位相の少なくとも一つが所定の値となるように駆動部を制御する駆動制御部とを備える。
第1の揺動体と、第2の揺動体と、第1の揺動体と第2の揺動体とを接続する第1のねじりバネと、第2の揺動体に接続され且つ第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネとを少なくとも有し構成される振動系と、振動系を支持する支持部とを備える。本発明の揺動体装置は、更に、前記揺動体の少なくとも一つの変位が、A1、A2を振幅、φを相対位相差、ωを角周波数、tを時間とした場合、A1sinωt+A2sin(nωt+φ)項を少なくとも含む数式(nは2以上の整数)で表される振動となるように振動系を駆動する駆動部と、前記揺動体の少なくとも一つの揺動体の変位に応じて信号を出力する信号出力器と、信号出力器の出力信号に基づいて前記数式のA1、A2、φの少なくとも一つが所定の値となるように駆動部を制御する駆動制御部とを備える。
第1の揺動体と、第2の揺動体と、第1の揺動体と第2の揺動体とを接続する第1のねじりバネと、第2の揺動体に接続され且つ第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネとを少なくとも有し構成される振動系と、振動系を支持する支持部とを備える。本発明の揺動体装置は、更に前記揺動体の少なくとも一つが、A1、A2を振幅、φを相対位相差、ωを角周波数、tを時間とした場合、その変位θ(t)に関して、
θ(t)=A1sinωt+ΣAnsin(nωt+φn-1) (nは2以上の整数)
で表される振動を起こすように振動系を駆動する駆動部と、前記揺動体の少なくとも一つの揺動体の変位に応じて信号を出力する信号出力器と、信号出力器の出力信号に基づいて前記数式のA1、A2、・・・An、φ1、φ2、・・・φn-1の少なくとも一つが所定の値となるように駆動部を制御する駆動制御部とを備える。
支持部と、第1の揺動体、第2の揺動体、第1の揺動体と第2の揺動体とを接続する第1のねじりバネ、支持部と第2の揺動体とを接続し且つ第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネとからなる振動系とからなる。更に本発明の揺動体装置は、前記2つの揺動体の1つが、A1、A2を振幅、φを相対位相差、ωを角周波数、tを時間とした場合、その変位θ(t)に関して、
θ(t)=A1sinωt+A2sin(2ωt+φ)
で表される振動となるように振動系を駆動する駆動部と、2つの揺動体の1つが異なる第1の変位角をとるときの第1及び第2の時刻情報と、第2の変位角を取るときの第3及び第4の時刻情報とを出力する信号出力器と、第1乃至第4の時刻情報に基づいて前記数式のA1、A2、φの少なくとも一つが所定の値となるように駆動部を制御する駆動制御部を備える。
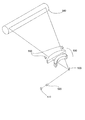
第1の実施形態の揺動体装置を説明する。本実施形態の揺動体装置は、図1(a)、(b)に示すように、第1の揺動体101、第2の揺動体102、第1のねじりバネ111、第2の揺動体102、第2のねじりバネ112を少なくとも有する振動系と、振動系を支持する支持部121とを有する。第1のねじりバネは第1の揺動体と第2の揺動体とを接続している。第2のねじりバネは、第1のねじりバネのねじり軸と共通するねじり軸を有するように第2の揺動体に接続されている。本実施形態の振動系は、2つの揺動体と2つのねじりバネとを少なくとも有すればよく、図1に示すように振動系を3つ以上の揺動体と3つ以上のねじりバネで構成してもよい。

θ(t)=A1sinωt+ΣAnsin(nωt+φn-1) 式2
ここで、nは2以上の整数である。nの値は、揺動体装置を構成する揺動体の数を増やせる限り大きくすることができる。実際に揺動体装置を作製する場合は、nは最大で3乃至5程度であることが好ましい。駆動部120は、電磁方式、静電方式、圧電方式などにより振動系に駆動力を印加することが可能な構成となっている。電磁駆動の場合は、例えば少なくとも1つの揺動体に永久磁石を設け、この永久磁石に磁場を印加するコイルを揺動体の近傍に配置してもよいし、永久磁石とコイルをこれとは逆の配置としてもよい。静電駆動の場合は、少なくとも1つの揺動体に電極を形成し、この電極との間に静電力を働かせるような電極を揺動体の近傍に形成する。圧電駆動の場合は、圧電素子を振動系や支持部に設けて駆動力を印加する。
揺動体が第1の変位角を取るときの走査光の照射位置に第1の受光素子を配置し、揺動体が第2の変位角を取るときの走査光の照射位置に第2の受光素子を配置する。第1及び第2の受光素子は、異なる素子でもよいし、同じ素子でもよい。また、走査光は、直接受光素子に入射する様にしてもよいし、少なくとも1つの反射部材を経て反射光を受光素子に入射する様にしてもよい。要するに、少なくとも1つの受光素子が、第1及び第2の走査角における走査光を受光して検出できる様に配置されていればよい。本実施形態に係る発明における信号出力器は、時間軸上で断続的に所定の変位角になったときに信号を出力するものでもよいし、時間軸上で連続的に変位に応じた信号を出力するものであってもよい。
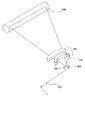
第2の実施形態の揺動体装置を説明する。本実施形態の揺動体装置は、図2(a)、(b)に示すように、第1の揺動体101、第2の揺動体102、第1のねじりバネ111、第2の揺動体102、第2のねじりバネ112からなる振動系と、振動系を支持する支持部121とを有する。第1のねじりバネ111は第1の揺動体101と第2の揺動体102とを接続している。第2のねじりバネ112は、第1のねじりバネのねじり軸と共通するねじり軸を有するように、支持部121と第2の揺動体102を接続している。
θ(t)=A1sin(ω1t+φ1)+A2sin(ω2t+φ2) 式3-1
θ(t)=A1sin(ω1t)+A2sin(ω2t+φ) 式3-2
若しくは
θ(t)=A1sin(ω1t+φ)+A2sin(ω2t) 式3-3
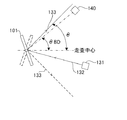
第3の実施形態の揺動体装置を説明する。本実施形態の揺動体装置を用いた光偏向装置のブロック図を図2(a)に示す。基本構成は上記第1及び第2の実施形態の揺動体装置と同じである。本実施形態では、図3(a)に示すように走査光133を検出するために、第1及び第2の変位角にそれぞれ第1及び第2の受光素子を配置している。
或る時刻t1及びt2において
θ(t1)=θ(t2)=θBD1 式4
或る時刻t3及びt4において
θ(t3)=θ(t4)=θBD2 式5
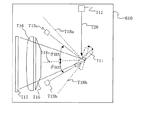
第4の実施形態の揺動体装置を説明する。本実施形態の揺動体装置を用いた光偏向装置のブロック図を図14に示す。基本構成は上記第1及び第2の実施形態の揺動体装置と同じである。本実施形態では、各周期の往復走査において、走査光133は、直接、受光素子140を2回通過し、かつ反射板160により2回偏向される。そして、反射板160により偏向された偏向光134は同じ受光素子140を2回通過する。駆動制御部150は、走査光133が受光素子140を通過する4つの時刻により駆動部120への駆動信号を生成する。
或る時刻t1及びt2において
θ(t1)=θ(t2)=θBD 式6
或る時刻t3及びt4において
θ(t3)=θ(t4)=θMIRROR 式7
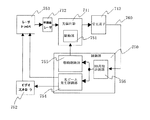
第5の実施形態の揺動体装置を説明する。本実施形態の揺動体装置を用いた光偏向装置のブロック図を図22に示す。基本構成は上記第1及び第2の実施形態の揺動体装置と同じである。異なる所は、次の点である。本実施形態による光偏向装置を示すブロック図である図22(a)に示す様に、駆動制御部150が振動モード変換部151を有する点である。駆動制御部150は、基本周波数を有する第1の信号と、基本周波数の整数倍の周波数である第2の周波数を有する第2の信号とを合成した第1の駆動信号を生成する。更に、振動モード変換部151を有する駆動制御部150は、第1及び第2の信号の少なくとも一方に位相を加え、且つこれらの信号を合成した第2の駆動信号を生成し、第1の駆動信号と第2の駆動信号を選択的に供給可能な構成となっている。例として、所望の位相を加える前の振動系の第1の振動モードの駆動時の偏向角θを図22(b)に、所望の位相を加えた後の振動系の第2の振動モードの駆動時の偏向角θを図22(c)に示す。図示例では、第1の振動運動をA1sin(ω1t)で表し、第2の振動運動をA2sin(ω2t+φ)で表し、第2の振動モードの駆動時には第2の振動運動のみにπの位相を加えてA2sin(ω2t+φ+π)としている。図22(b)及び図22(c)の実線の曲線が示す様に、走査光133は受光素子140を2回ずつ合計4回通過する。駆動制御部150は4つの通過時刻から第1の振動運動と第2の振動運動を所望の運動にするための駆動信号を算出する。算出された駆動信号に基づいて駆動部120により振動系100は所望の振動運動を行うよう制御される。
θa(t)=A1sin(ω1t+φ1)+A2sin(ω2t+φ2) 式8
θb(t)=A1sin(ω1t+φ1+φ1´)+A2sin(ω2t+φ2+φ2´) 式9
θa(t1)=θa(t2)=θaBD 式10
θb(t3)=θb(t4)=θaBD 式11
θa(t)=A1sin(ω1t)+A2sin(ω2t+φ) 式12
θb(t)=A1sin(ω1t+φ1´)+A2sin(ω2t+φ+φ2´) 式13
θa(t1)=θa(t2)=θaBD 式14
θb(t3)=θb(t4)=θaBD 式15
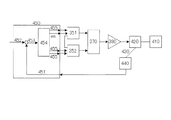
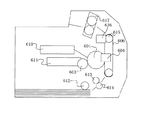
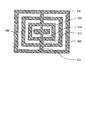
本発明の実施例1による光偏向装置を説明する。実施例1の光偏向装置のブロック図は図2(a)に示されるものと同じである。図4は本実施例の具体的な構成図である。図4(a)は本光偏向装置の振動系の上面図である。プレート部材300が、シリコンウェハをエッチング加工して作製されている。平板状の揺動体301は、図中の上下を2本のねじりバネ311a、311bで支持されている。揺動体301の上面には、光反射膜(反射ミラー)331が成膜されている。枠形状の揺動体302は、その内側にねじりバネ311a、311bを支持しており、図中の上下を2本のねじりバネ312a、312bで支持されている。枠形状の支持枠321は、その内側においてねじりバネ312a、312bを支持している。
本発明の実施例2による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図2(a)に示されるものと同じである。また、その構成は図4に示されるものと同じである。
まず、A1の制御を行なう。基本周波数で運動する第1の振動運動のみで光走査するために、任意波形発生器351の周波数を2000Hzの角周波数とし、任意波形発生器352の周波数を2000Hz及び4000Hz以外の零を含む任意の角周波数とする。すると、第2の振動運動は共振振動を起こさず、光偏向装置の偏向角θは次の式で表現できる。
θ(t)=A1sin(ω1t) 式16
θ(t1)=θ(t2)=θBD1 式17
θ(t3)=θ(t4)=θBD2 式18
すると、t2−t1及びt4−t3のうち少なくとも一方の値が0.102msec(これは、図7に示す目標とする偏向角θの変化から、予め求めてある)になる様に任意波形発生器351の振幅を調整することで、A1を所望のA1とできる。決める未知の値は1つなので、この方法でA1を決められる。
次に、第1及び第2の振動運動の位相差φを零に調整する。その際、次の様にする。
t2−t1=t4−t3 式19
かつ、
t3−t2>t30−t20 式20
式19を要求するのは、第1及び第2の受光素子141、142を光偏向装置の走査中心から対称の位置に夫々配置しているからである。こうなる様に任意波形発生器351、352の位相差を調整すると、第1及び第2の振動運動の位相差が零となる。ここでも、決める未知の値は1つなので、この方法でφを決められる。なお、式20は、振動運動が逆の位相になるのを避けるための条件である。
続いて、A2の制御を行なう。第1及び第2の受光素子141、142を走査光133が通過する時刻をt1、t2、t3、t4とする。このうちの少なくとも1つ以上が、t1=0.052msec、t2=0.154msec、t3=0.346msec、t4=0.448msecを満たす様に任意波形発生器352の振幅を調整する。これにより、A2を所望のA2とすることができる。ここでも、決める未知の値は1つなので、この方法でA2を決められる。
ここで、t1、t2、t3、t4が或る許容誤差範囲内であれば制御終了とする。異なっていればA1制御に戻り再び上記制御を行なう。
本発明の実施例3による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図2(a)に示されるものと同じである。また、その構成は図4に示されるものと同じである。
本発明の実施例4による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図2(a)に示されるものと同じである。また、その構成は図4に示されるものと同じである。本光偏向装置の偏向角θは、第1の振動運動の振幅、角周波数を夫々A1、ω1、第2の振動運動の振幅、角周波数を夫々A2、ω2、2つの周波数の夫々の位相の差をφ、時間をtとしたときに、上記式3-2若しくは上記式3-3で表現できる。式3-2ならびに式3-3中のφはφ1−φ2若しくはφ2−φ1である。
本発明の実施例5による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図2(a)に示されるものと同じである。また、その構成は図4に示されるものと同じである。
図10に示す合成波の式(式3-2)のA1sin(ω1t)を第1の成分とし、A2sin(ω2t+φ)を第2の成分とする。第1の成分と第2の成分の位相が変動した場合、位相の変動によりt1の値が減少するとt2の値が増加し、逆に位相の変動によりt1の値が増加するとt2の値が減少する。つまり、第1の成分と第2の成分の位相の変動に対して、t1とt2の増減は逆に変化する関係にある。
誤差信号は以下の式により得ることができる。
φの誤差信号=t1−δ×t2−φ0 (δ≧0) 式27−1
第1の成分の振幅A1が変動した場合、振幅A1の変動によりt12の値が増加するとt21の値も増加し、逆にt12の値が減少するとt21の値も減少する。つまり、第1の成分の振幅A1の変動に対して、t12とt21の増減は同じように変化する。
の誤差信号は以下の式により得ることができる。
A1の誤差信号=t1+δ×t2-α×(t12+β×t21)-A10(α、β、δ≧0)式27−2
第2の成分の振幅A2の誤差信号についても、第1の成分の振幅A1の誤差信号の算出と同様の原理により求めることができる。
A2の誤差信号は以下の式により得ることができる。
A2の誤差信号=t12-γ×t21-A20
(γ≧0) 式27−3
。
本発明の実施例6による光偏向装置を説明する。本実施例は、誤差検出回路が図13に示すものであること以外は、実施例5の内容と同様である。本実施例では光偏向装置の走査中心から対称の位置θ1、θ2に第1及び第2の受光素子141、142を配置しており、非対称に配置された場合を除いている。したがって、実施例5のように減算比、加算比を調整するためのパラメータ(α、β、γ、δ)を考慮する必要がないため、より簡単に誤差信号を算出することができる。それぞれの誤差信号の算出方法に関しては、実施例5と同様の考えに基づいている。
図13に本実施例の誤差検出回路のブロック図を示す。A1の誤差信号は、A1の誤差信号を表す信号からA1の制御目標値A10を減算することで求めることができ、次の式で表すことができる。
A1の誤差信号=t1+t2-A10 式28−1
A2の誤差信号=t12-A20 (もしくはt21-A20) 式28−2
φの誤差信号=t1-t2-φ0 式28−3
本発明の実施例7の光偏向装置のブロック図は図14に示されるものと同じである。図4(a)、図4(b)、及び図16は本実施例の具体的な構成図である。図4(a)、図4(b)の構成については実施例1で説明した通りである。
本発明の実施例8による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図14に示されるものと同じである。また、その構成は図4(a)、図4(b)、及び図16に示されるものと同じである。
θ(ta)=θ(tb)=θBD 式29
θ(tc)=θ(td)=θMIRROR 式30
本発明の実施例9による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図14に示されるものと同じである。また、その構成は図4(a)、図4(b)、及び図16に示されるものと同じである。図15に示す光偏向装置(反射ミラー101)と受光素子140と反射板160の配置は実施例8と同様である。本実施例の光偏向装置の偏向角θは実施例8で示した図17と同じである。
本発明の実施例10による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図14に示されるものと同じである。また、その構成は図4(a)、図4(b)、及び図16に示されるものと同じである。図15に示す光偏向装置(反射ミラー101)と受光素子140と反射板160の配置は実施例8と同様である。本実施例の光偏向装置の偏向角θは図17に示されている。図17中のφ1とφ2はφ=φ1−φ2若しくはφ=φ2−φ1の関係式で表現され、図17中の上記式3-1は、上記式3-2に、若しくは上記式3-3に変換される。
θ(ta)=θ(tb)=θBD
θ(tc)=θ(td)=θMIRROR
この時、時間差tb−ta、tc−tb、td−tcの関係は、受光素子140と反射板160の配置が非対称になっているので以下のようになる。
tb−ta<td−tc<tc−tb 式31
本発明の実施例11による光偏向装置を説明する。本実施例の光偏向装置のブロック図は図14に示されるものと同じである。また、その構成は図4(a)、図4(b)、及び図16に示されるものと同じである。図15に示す光偏向装置(反射ミラー101)と受光素子140と反射板160の配置関係は実施例8と同様であるが、その位置は次の様になっている。すなわち、光偏向装置の走査中心を原点としたとき、受光素子140を光偏向装置(ミラー)の偏向角θが+0.8となるθBDの位置に配置する。偏向板160は、光偏向装置の偏向角θが−0.8となるθMIRRORの位置に配置する。すなわち、両者は走査中心に対して対称に配置されている。
θ(ta)=θ(tb)=θBD
θ(tc)=θ(td)=θMIRROR
その時、時間差tb−ta、tc−tb、td−tcの関係は、受光素子140と反射板160の配置が対称になっているので次のようになる。
tb−ta=td−tc、tb−ta<tc−tb
式32
twa=twb、twc=twd、twa>twc 式33
上記関係式から基準時間t10bはtaと判断できる。
本発明の実施例12による光偏向装置(電子写真式の画像形成装置)を説明する。本実施例の光偏向装置のブロック図は図2(a)に示されるものと同じである。また、その構成は図4(a)、(b)、(c)に示されるものと同じである。
本発明の実施例13による光偏向装置(電子写真式の画像形成装置)を説明する。本実施例の光偏向装置のブロック図は図14に示されるものと同じである。また、その構成は図4(a)、図4(b)、図16に示されるものと同じである。
実施例1乃至13は上記第1乃至第4の実施形態のタイプに属する実施例であった。以下に、上記第5の実施形態のタイプに属する実施例を説明する。実施例14の光偏向装置のブロック図は図22に示されるものと同じである。
本実施例も本発明による光偏向装置の第5の実施形態に属する実施例である。本実施例の光偏向装置のブロック図は図22に示されるものと同じである。構成も基本的に実施例14と同じである。本実施例は、タイプは異なるが、上記実施例2に対応するものである。
θb(t)=A1sin(ω1t+φ1+π)+A2sin(ω2t+φ2+π)
式34
であるので、設定時間を0.102msecに設定する。tb0−ta0の値を0.102msecになる様に任意波形発生器の振幅を調整することで所望のA1とすることができる。
本実施例も本発明による光偏向装置の第5の実施形態に属する実施例である。本実施例は、タイプは異なるが、上記実施例3に対応するものである。
θc(t)=A1sin(ω1t+φ1)+A2sin(ω2t+φ2+π) 式35
本実施例も本発明による光偏向装置の第5の実施形態に属する実施例である。本実施例は、タイプは異なるが、上記実施例4に対応するものである。
次に、本発明の実施例18による画像形成装置を説明する。本実施例は、本発明による第5の実施形態のタイプの光偏向装置を用いる。本実施例の光偏向装置のブロック図は図22に示されるものと同じである。
次に、所望の駆動信号を生成するまでの光ビーム発生のタイミングを調整する技術に係る光偏向装置の実施例を説明する。
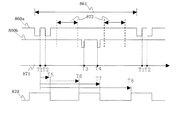
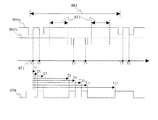
本発明の実施例20を説明する。本実施例の画像形成装置の構成に関しては、上記実施例19と同じである。本実施例では、図31に示す様に、APC発光による発光タイミングが実施例19と異なる。本実施例では、光ビーム720が受光素子713を走査端方向に通過して折り返して走査中央方向に戻って来るタイミングの所でも消灯する発光タイミングとしている。このことで、光源の発光時間が短くできるという効果が得られる。本実施例におけるレーザ制御のタイミングチャートを示す図31において、870は、レーザ間欠発光時のAPC発光による発光タイミングを示す信号である。また、T5、T7、T9、T11は基準時刻(T1)から光ビームの消灯までの経過時間を、T6、T8、T10、T12は基準時刻(T1)から光ビームの点灯までの経過時間を示している。本実施例でも、基準時刻をT1としたが他のいかなる時間であっても良い。
本発明の実施例21を説明する。本実施例でも、画像形成装置の構成に関しては実施例19と同様である。本実施例は、起動時の画像形成装置の制御の手法に特徴がある。図32に、本実施例の制御に係わるシーケンス図を示す。本実施例におけるレーザ制御を示すタイミングチャートは、実施例19で説明した図30と同じである。
101、102、103、301、302 揺動体
111、112、113、311a、311b、312a、312b
ねじりバネ
120、340、751 駆動部(電磁アクチュエータ)
121 支持部
131、410、510、712 光源(半導体レーザ)
140、141、142、441、442、550、713 信号出力器(変位角計測器、受光素子、第1の受光素子、第2の受光素子)
150、450、755 駆動制御部(制御部)
151 振動モード変換部
160、460、560 信号出力器(変位角計測器、反射部材)
170 信号出力器(変位角計測器、ピエゾ抵抗体)
500、711 光偏向装置
754 光ビーム発生制御部(レーザ発光制御部)
Claims (11)
- 複数の揺動体と複数のねじりバネとを含み構成される揺動体装置であって、
第1の揺動体と、第2の揺動体と、該第1の揺動体と該第2の揺動体とを接続する第1のねじりバネと、前記第2の揺動体に接続され且つ前記第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネと、を少なくとも有し構成される振動系と、
前記振動系を支持する支持部と、
前記揺動体の少なくとも一つの変位が、A1、A2を振幅、φを相対位相差、ωを角周波数、tを時間とした場合、A1sinωt+A2sin(nωt+φ)項を少なくとも含む数式(nは2以上の整数)で表される振動となるように前記振動系を駆動する駆動部と、
前記揺動体の少なくとも一つの揺動体が、最大変位角より小さい第1及び第2の変位角をとるときの時刻情報を含む信号を出力する信号出力器と、
前記信号出力器の出力信号に基づいて前記数式のA1、A2、φの少なくとも一つが所定の値となるように前記駆動部を制御する駆動制御部と、
を有し、
前記信号出力器が出力する信号は、前記第1の変位角をとるときの異なる第1及び第2の時刻情報と前記第2の変位角をとるときの異なる第3及び第4の時刻情報を含む時刻情報を含んでおり、
前記駆動制御部は、前記第1乃至第4の4つの時刻情報に基づいて前記駆動部を制御することを特徴とする揺動体装置。 - 複数の揺動体と複数のねじりバネとを含み構成される揺動体装置であって、
第1の揺動体と、第2の揺動体と、該第1の揺動体と該第2の揺動体とを接続する第1のねじりバネと、前記第2の揺動体に接続され且つ前記第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネと、を少なくとも有し構成される振動系と、
前記振動系を支持する支持部と、
前記揺動体の少なくとも一つが、A1、Anを振幅、φn-1を相対位相差、ωを角周波数、tを時間とした場合、その変位θ(t)に関して、
θ(t)=A1sinωt+ΣAnsin(nωt+φn-1) (nは2以上の整数)
で表される振動を起こすように前記振動系を駆動する駆動部と、
前記揺動体の少なくとも一つの揺動体が、最大変位角より小さい第1及び第2の変位角をとるときの時刻情報を含む信号を出力する信号出力器と、
前記信号出力器の出力信号に基づいて前記数式のA1、A2、・・・An、φ1、φ2、・・・φn-1の少なくとも一つが所定の値となるように前記駆動部を制御する駆動制御部と、
を有し、
前記信号出力器が出力する信号は、前記第1の変位角をとるときの異なる第1及び第2の時刻情報と前記第2の変位角をとるときの異なる第3及び第4の時刻情報を含む時刻情報を含んでおり、
前記駆動制御部は、前記第1乃至第4の4つの時刻情報に基づいて前記駆動部を制御することを特徴とする揺動体装置。 - 前記第1の変位角となる時刻から、振動の端部で折り返して再び前記第1の変位角となる時刻までの時間をt1とし、
前記第1の変位角となる時刻から振動の中心を通過して、前記第2の変位角となる時刻までの時間をt12とし、
前記第2の変位角を通過する時刻から振動の端部で折り返して再び前記第2の変位角となる時刻までの時間をt2とし、
前記第2の変位角を通過する時刻から振動の中心を通過して前記第1の変位角となる時刻までの時間をt21とし、
前記駆動制御部は、前記t1、t12、t2、t21のうちの少なくとも1つの時間を用いて前記駆動部を制御することを特徴とする請求項1または2に記載の揺動体装置。 - 前記駆動制御部は、前記φを制御する際に、t1-δ×t2(δ≧0)が所定の値となるように前記駆動部を制御することを特徴とする請求項3に記載の揺動体装置。
- 前記駆動制御部は、前記A1を制御する際に、t1+δ×t2-α×(t12+β×t21) (α、β、δ≧0)が所定の値となるように前記駆動部を制御することを特徴とする請求項3に記載の揺動体装置。
- 前記駆動制御部は、前記A2を制御する際に、t12-γ×t21(γ≧0)が所定の値となるように前記駆動部を制御することを特徴とする請求項3に記載の揺動体装置。
- 揺動体装置であって、
支持部と、
第1の揺動体と、第2の揺動体と、該第1の揺動体と該第2の揺動体とを接続する第1のねじりバネと、前記支持部と第2の揺動体とを接続し且つ前記第1のねじりバネのねじり軸と共通するねじり軸を有する第2のねじりバネとからなる振動系と、
前記2つの揺動体の1つが、A1、A2を振幅、φを相対位相差、ωを角周波数、tを時間とした場合、その変位θ(t)に関して、
θ(t)=A1sinωt+A2sin(2ωt+φ)
で表される振動となるように前記振動系を駆動する駆動部と、
前記2つの揺動体の1つが最大変位角より小さい第1の変位角をとるときの異なる第1及び第2の時刻情報と、最大変位角より小さい第2の変位角を取るときの異なる第3及び第4の時刻情報とを出力する信号出力器と、
前記第1乃至第4の時刻情報に基づいて前記数式のA1、A2、φの少なくとも一つが所定の値となるように前記駆動部を制御する駆動制御部と、
を有することを特徴とする揺動体装置。 - 前記駆動制御部は、
前記振動系における基本周波数を有する第1の信号と、該基本周波数の整数倍の周波数である第2の周波数を有する第2の信号とを合成した第1の駆動信号と、
前記第1及び第2の信号の少なくとも一方に位相を加え、且つこれらの信号を合成した第2の駆動信号と、
を選択的に供給可能であり、且つ、
前記第1の駆動信号での駆動時に前記信号出力器から出力される出力信号と、前記第2の駆動信号での駆動時に前記信号出力器から出力される出力信号と、に基づいて、前記駆動部を制御することを特徴とする請求項1または2に記載の揺動体装置。 - 前記第1の駆動信号での駆動時に前記信号出力器から出力される出力信号は異なる2つの時刻情報であり、
前記第2の駆動信号での駆動時に前記信号出力器から出力される出力信号は異なる2つの時刻情報であり、
前記駆動制御部は、前記4つの時刻情報に基づいて前記駆動部を制御することを特徴とする請求項8に記載の揺動体装置。 - 光ビームを発生する光源と、前記揺動体の少なくとも1つに反射ミラーが形成された請求項1乃至9のいずれかに記載の揺動体装置と、を有することを特徴とする光偏向装置。
- 請求項10に記載の光偏向装置と光学系とを少なくとも含み、前記光源からの光ビームを前記光偏向装置により走査し、前記光学系により目標位置に走査光を集光することを特徴とする画像形成装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007023881A JP5441309B2 (ja) | 2006-02-13 | 2007-02-02 | 揺動体装置、及び光偏向装置 |
| US12/160,209 US8400698B2 (en) | 2006-02-13 | 2007-02-13 | Oscillator device, optical deflecting device and method of controlling the same |
| EP07714436A EP1987388A1 (en) | 2006-02-13 | 2007-02-13 | Oscillator device, optical deflecting device and method of controlling the same |
| CN2007800053558A CN101384942B (zh) | 2006-02-13 | 2007-02-13 | 振荡器装置、光学偏转装置及图像形成设备 |
| KR1020087019740A KR100979346B1 (ko) | 2006-02-13 | 2007-02-13 | 요동체 장치, 광 편향기 및 이를 제어하는 방법 |
| PCT/JP2007/052909 WO2007094489A1 (en) | 2006-02-13 | 2007-02-13 | Oscillator device, optical deflecting device and method of controlling the same |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006035491 | 2006-02-13 | ||
| JP2006035491 | 2006-02-13 | ||
| JP2006189947 | 2006-07-11 | ||
| JP2006189947 | 2006-07-11 | ||
| JP2007023881A JP5441309B2 (ja) | 2006-02-13 | 2007-02-02 | 揺動体装置、及び光偏向装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008040460A JP2008040460A (ja) | 2008-02-21 |
| JP2008040460A5 JP2008040460A5 (ja) | 2010-03-18 |
| JP5441309B2 true JP5441309B2 (ja) | 2014-03-12 |
Family
ID=37986072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007023881A Expired - Fee Related JP5441309B2 (ja) | 2006-02-13 | 2007-02-02 | 揺動体装置、及び光偏向装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8400698B2 (ja) |
| EP (1) | EP1987388A1 (ja) |
| JP (1) | JP5441309B2 (ja) |
| KR (1) | KR100979346B1 (ja) |
| CN (1) | CN101384942B (ja) |
| WO (1) | WO2007094489A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5065116B2 (ja) | 2007-06-14 | 2012-10-31 | キヤノン株式会社 | 揺動体装置、光偏向装置、及びその制御方法 |
| JP2009058616A (ja) * | 2007-08-30 | 2009-03-19 | Canon Inc | 揺動体装置、光偏向装置、及びそれを用いた画像形成装置 |
| JP2009069392A (ja) | 2007-09-12 | 2009-04-02 | Canon Inc | 揺動体装置、揺動体装置によって構成される光偏向器及び画像形成装置 |
| JP2009122383A (ja) | 2007-11-14 | 2009-06-04 | Canon Inc | 揺動体装置の製造方法、該製造方法により製造された揺動体装置によって構成される光偏向器及び光学機器 |
| US7920313B2 (en) * | 2008-03-12 | 2011-04-05 | Canon Kabushiki Kaisha | Oscillator device, optical deflector and image forming apparatus using the optical deflector |
| JP5408887B2 (ja) * | 2008-03-12 | 2014-02-05 | キヤノン株式会社 | 揺動体装置、揺動体装置を用いた画像形成装置 |
| JP5283966B2 (ja) * | 2008-05-14 | 2013-09-04 | キヤノン株式会社 | 光偏向装置、及び画像形成装置 |
| JP5296428B2 (ja) * | 2008-06-20 | 2013-09-25 | キヤノン電子株式会社 | 光走査装置及び該光走査装置を用いた画像形成装置、及び画像読み取り装置とディスプレイ |
| JP5264337B2 (ja) * | 2008-07-15 | 2013-08-14 | キヤノン株式会社 | 光学走査装置及びそれを備える画像形成装置 |
| KR101279441B1 (ko) * | 2008-08-21 | 2013-07-05 | 삼성전자주식회사 | 멤스 미러, 미러 스캐너, 광주사 유닛 및 광주사 유닛을 채용한 화상형성장치 |
| JP5424995B2 (ja) | 2010-06-24 | 2014-02-26 | キヤノン株式会社 | 光走査装置及び画像形成装置 |
| JP5450496B2 (ja) * | 2011-03-29 | 2014-03-26 | 京セラドキュメントソリューションズ株式会社 | 光走査装置及びこれを備えた画像形成装置 |
| CN103620477B (zh) * | 2012-02-22 | 2015-04-29 | 京瓷办公信息系统株式会社 | 光扫描装置和图像形成装置 |
| JP6077938B2 (ja) * | 2012-05-31 | 2017-02-08 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット |
| EP2977811A1 (de) * | 2014-07-25 | 2016-01-27 | Trumpf Laser Marking Systems AG | System mit einem piezoresistiven Positionssensor |
| JP6587430B2 (ja) * | 2015-06-23 | 2019-10-09 | キヤノン株式会社 | 画像生成装置及び画像生成方法 |
| JP6389846B2 (ja) | 2016-07-25 | 2018-09-12 | キヤノン株式会社 | 画像形成装置およびコントローラ |
| EP3521894B1 (en) * | 2018-02-06 | 2023-11-08 | Murata Manufacturing Co., Ltd. | Mems reflector system with trajectory control |
| JP2019200376A (ja) | 2018-05-18 | 2019-11-21 | キヤノン株式会社 | 走査装置及び画像形成装置 |
| DE102018114388A1 (de) * | 2018-06-15 | 2019-12-19 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Steuerung einer Antriebseinrichtung eines Mikroschwingspiegels, Steuervorrichtung und Umlenkspiegeleinrichtung |
| WO2020032274A1 (ja) * | 2018-08-10 | 2020-02-13 | 浜松ホトニクス株式会社 | アクチュエータ装置、及びアクチュエータ装置の製造方法 |
| CN109557661B (zh) * | 2018-10-15 | 2021-02-26 | 武汉光迅科技股份有限公司 | 驱动光学转镜转动的方法及用于驱动光学转镜转动的装置 |
| US11270418B1 (en) * | 2020-11-19 | 2022-03-08 | VPIX Medical Incorporation | Method and system for correcting phase of image reconstruction signal |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4859846A (en) * | 1988-07-21 | 1989-08-22 | Burrer Gordon J | Dual-mode resonant scanning system |
| DE69030304T2 (de) * | 1989-12-27 | 1997-08-14 | Canon Kk | Bildaufzeichnungsgerät, welches Lichtstrahlen verwendet |
| EP0775969B1 (en) * | 1990-07-05 | 2000-11-02 | Canon Kabushiki Kaisha | Image forming apparatus and constant current circuit switching device for use therewith |
| US20040004775A1 (en) * | 2002-07-08 | 2004-01-08 | Turner Arthur Monroe | Resonant scanning mirror with inertially coupled activation |
| US8054522B2 (en) * | 2003-04-21 | 2011-11-08 | Technion Research & Development Foundation Ltd. | Oscillating mirror having a plurality of eigenmodes |
| JP4492252B2 (ja) * | 2003-09-05 | 2010-06-30 | セイコーエプソン株式会社 | アクチュエータ |
| US7659918B2 (en) * | 2003-10-08 | 2010-02-09 | Texas Instruments Incorporated | Apparatus and methods for adjusting the rotational frequency of a scanning device |
| JP4323939B2 (ja) * | 2003-12-11 | 2009-09-02 | キヤノン株式会社 | 画像形成装置及び画像形成方法 |
| JP4027359B2 (ja) * | 2003-12-25 | 2007-12-26 | キヤノン株式会社 | マイクロ揺動体、光偏向器、画像形成装置 |
| JP3793208B2 (ja) * | 2004-03-23 | 2006-07-05 | キヤノン株式会社 | 変調光源、それを有する画像表示装置、および変調光源の駆動方式 |
| JP2005292627A (ja) * | 2004-04-02 | 2005-10-20 | Ricoh Co Ltd | 光走査装置 |
| JP2005326462A (ja) * | 2004-05-12 | 2005-11-24 | Canon Inc | 光偏向器およびその制御方法 |
| JP2005326475A (ja) * | 2004-05-12 | 2005-11-24 | Canon Inc | 電子写真装置及びプロセスカートリッジ |
| JP2005326746A (ja) * | 2004-05-17 | 2005-11-24 | Canon Inc | 光偏向装置およびその制御方法 |
| JP4447963B2 (ja) * | 2004-05-31 | 2010-04-07 | キヤノン株式会社 | 光偏向器制御装置 |
| JP5159028B2 (ja) * | 2004-06-29 | 2013-03-06 | キヤノン株式会社 | 揺動体を有する光偏向装置、及びその調整方法 |
| KR100682881B1 (ko) * | 2005-01-19 | 2007-02-15 | 삼성코닝 주식회사 | 결정 성장 방법 |
| US7474165B2 (en) * | 2005-11-22 | 2009-01-06 | Canon Kabushiki Kaisha | Oscillating device, optical deflector and optical instrument using the same |
| US7436566B2 (en) | 2005-11-22 | 2008-10-14 | Canon Kabushiki Kaisha | Oscillating device, optical deflector and method of controlling the same |
| JP5065116B2 (ja) * | 2007-06-14 | 2012-10-31 | キヤノン株式会社 | 揺動体装置、光偏向装置、及びその制御方法 |
-
2007
- 2007-02-02 JP JP2007023881A patent/JP5441309B2/ja not_active Expired - Fee Related
- 2007-02-13 US US12/160,209 patent/US8400698B2/en not_active Expired - Fee Related
- 2007-02-13 WO PCT/JP2007/052909 patent/WO2007094489A1/en active Application Filing
- 2007-02-13 CN CN2007800053558A patent/CN101384942B/zh not_active Expired - Fee Related
- 2007-02-13 EP EP07714436A patent/EP1987388A1/en not_active Withdrawn
- 2007-02-13 KR KR1020087019740A patent/KR100979346B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US8400698B2 (en) | 2013-03-19 |
| CN101384942A (zh) | 2009-03-11 |
| JP2008040460A (ja) | 2008-02-21 |
| KR100979346B1 (ko) | 2010-08-31 |
| WO2007094489A1 (en) | 2007-08-23 |
| EP1987388A1 (en) | 2008-11-05 |
| CN101384942B (zh) | 2012-05-23 |
| US20090051992A1 (en) | 2009-02-26 |
| KR20080094045A (ko) | 2008-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5441309B2 (ja) | 揺動体装置、及び光偏向装置 | |
| JP5064864B2 (ja) | 光偏向装置、画像形成装置、及び光偏向装置の駆動方法 | |
| JP4533407B2 (ja) | 画像形成装置 | |
| JP5404102B2 (ja) | 揺動体装置、及びそれを用いる光偏向装置 | |
| JP5065116B2 (ja) | 揺動体装置、光偏向装置、及びその制御方法 | |
| JP2009192640A (ja) | 揺動体装置及び光偏向装置 | |
| JP2009058616A (ja) | 揺動体装置、光偏向装置、及びそれを用いた画像形成装置 | |
| US20110064470A1 (en) | Light deflector device and image forming apparatus | |
| US20080297869A1 (en) | Oscillator device and drive control method for oscillation system of oscillator device | |
| US20080231683A1 (en) | Image forming apparatus and control method for same | |
| JP5188315B2 (ja) | 揺動体装置、光偏向装置、及びそれを用いた光学機器 | |
| US20090212874A1 (en) | Oscillator device | |
| JP5341372B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP2009265285A (ja) | 揺動体装置 | |
| JP2010048928A (ja) | 揺動体装置、及びそれを用いた光偏向装置 | |
| JP5408887B2 (ja) | 揺動体装置、揺動体装置を用いた画像形成装置 | |
| JP2009086557A (ja) | 揺動体装置、光偏向装置、及びそれを用いた光学機器 | |
| JP2009258392A (ja) | 揺動体装置、これを用いた光偏向装置、及び揺動体装置の駆動制御方法 | |
| US7911160B2 (en) | Oscillation device, optical deflection apparatus, and drive-signal generating method | |
| JP2009034961A (ja) | 画像形成装置 | |
| JP2009042579A (ja) | 光偏向装置、及び揺動体のジッタ抑制方法 | |
| JP2009020404A (ja) | 光走査装置及び画像形成装置 | |
| JP2008040081A (ja) | 光学走査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5441309 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |
|
| LAPS | Cancellation because of no payment of annual fees |