JP4429083B2 - 遮光型座標入力装置及びその座標入力方法 - Google Patents
遮光型座標入力装置及びその座標入力方法 Download PDFInfo
- Publication number
- JP4429083B2 JP4429083B2 JP2004166340A JP2004166340A JP4429083B2 JP 4429083 B2 JP4429083 B2 JP 4429083B2 JP 2004166340 A JP2004166340 A JP 2004166340A JP 2004166340 A JP2004166340 A JP 2004166340A JP 4429083 B2 JP4429083 B2 JP 4429083B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- pen
- light shielding
- shielding
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




























Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0428—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by sensing at the edges of the touch surface the interruption of optical paths, e.g. an illumination plane, parallel to the touch surface which may be virtual
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of two-dimensional [2D] relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03542—Light pens for emitting or receiving light
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0421—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen
- G06F3/0423—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means by interrupting or reflecting a light beam, e.g. optical touch-screen using sweeping light beams, e.g. using rotating or vibrating mirror
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/12—Reflex reflectors
- G02B5/122—Reflex reflectors cube corner, trihedral or triple reflector type
- G02B5/124—Reflex reflectors cube corner, trihedral or triple reflector type plural reflecting elements forming part of a unitary plate or sheet
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Input By Displaying (AREA)
Description
また、上記目的を達成するために、本発明の遮光型座標入力装置では、入力面の面方向に沿って光を投光する投光部と、前記投光部からの光を反射する反射部と、前記反射部からの反射光を画素単位で受光して該反射光の光強度分布を検出する受光部とを備え、前記入力面上から入力して該入力面を指し示す指示入力手段によって前記入力面上の光が遮られる遮光部分の位置を前記受光部から出力されるデータを基に検出して、該遮光部分の位置の座標を求める遮光型座標入力装置において、前記入力面上に前記遮光部分が存在するときの光強度分布と前記遮光部分が存在しないときの光強度分布との差分が所定のレベルを超える画素範囲の幅の時間変化、または前記入力面上に前記遮光部分が存在するときの光強度分布を前記遮光部分が存在しないときの光強度分布で規格化した分布波形の遮光による変化が所定のレベルを超える画素範囲の幅の時間変化に基づいて、前記指示入力手段の入力状態がペンアップ状態であるか、あるいはペンダウン状態であるかを判定する判定手段を備えたことを特徴とする。
図1は、本発明の実施の一形態に係る遮光型座標入力装置の全体的なハード構成を示す平面図であり、図2は、図1に示した遮光型座標入力装置の側面方向から見た模式図である。
S_elc ∝ S_opt …(式100)
である。
本実施の形態は、前記ペンダウン/ペンアップ状態を遮光の状態変化で判定しようというものであり、特に、前記遮光位置における遮光の状態の時間変化によってペンダウン/ペンアップを判定するものである。

ここで、θは、ペン105が傾いたときの、該ペン105の概主軸と座標入力面104の法線との成す角であり、座標入力装置の仕様で定められた最大傾き角(例えば±30度など)を越えない値である。
同様に、遮光量S_elcは遮光面積S_optに比例するので、
dS_elc(h)/dh<0(ただし、h0≦h≦h2) …(式104)
となり、したがって、遮光量S_elcもペン105の高さhに対して単調減少となる(図11を参照)。
d・[ F(θ、X)]/dX>0 …(式105)
となる。
Wd(h) ∝ F(θ、h3−h) …(式106)
のように表すことができる。
d・Wd(h)/dh=d[F(θ、h3−h)]/dh<0 …(式107)となる。すなわち、式105のようにペン105が構成されていれば、式107に示すように、hに対して遮光幅Wdが単調減少になるように構成されていることになる(図12参照)。これを式103と式104に対応させると、
d・Wd(h)/dh<0(ただし、h0≦h≦h3、h3はthshWに相当す
るレベル) …(式108)
と表すことができる。
上記の式103、式104及び式108のように構成した上で、以下、本実施の形態におけるアルゴリズムについて、図13〜図17を参照しつつ説明する。
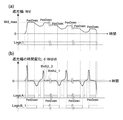
S_elc < thsh1 のとき “0” …論理の定義1
図13(b)に示すようにlogicAを次のように定義する。
それ以外のとき “0” …論理の定義A
図13(b)に示すようにllogicB_1を次のように定義する。
dS_elc/dtが極小値となるとき“1”から“0”に遷移する
…論理の定義B_1
これらlogic1、logicA、及びlogicB_1を基に、次の論理式を用いて、ペンダウン(PenDown)、及びペンアップ(PenUp)の判別を行う。図13(b)の斜線部分(PenDown)がペンダウンと判別されたことを示している。
PenUp = logic1 ∩ ( /PenDown ) …(式201)
第二のアルゴリズムは、logicBの定義をより安定なやり方にするものであり、図14(b)に示すようにlogicB_2を次のように定義する。
dS_elc/dt ≦ thsh3_2 ⇒ dS_elc/dt>thsh3_2
のように状態遷移するときに“0”から“1”に遷移し、
dS_elc/dt>thsh3_1 ⇒ dS_elc/dt≦thsh3_1
のように状態遷移するときに“1”から“0”に遷移する。
このようにlogicB_2を定めることにより、第一のアルゴリズムと同様に、次の論理式を用いてペンダウン(PenDown)及びペンアップ(PenUp)の判別を行う。図14(b)の斜線部分(PenDown)がペンダウンと判別されたことを示している。
PenUp = logic1 ∩ ( /PenDown ) …(式303)
一方、ここまでの説明では遮光量S_elcの時間変化を判別の対象としていたが、前述のように、遮光幅Wdの時間変化を判別の対象として、前記第一及び第二のアルゴリズムと同じやり方で適用することができる。唯一、注意すべきは ここでは logic1の定義における閾値がthsh1=0となる点である。
遮光幅:Wd < 0 のとき “0” …論理の定義1
図15(b)に示したように、logicA を次のように定義する。
それ以外のとき “0” …論理の定義A
図15(b)に示したように、logicB_1を次のように定義する。
d・Wd/dtが極小値となるとき“1”から“0”に遷移する …論理の定義B_1
これらlogic1、logicA、及びlogicB_1を基に、次の論理式を用いてペンダウン(PenDown)及びペンアップ(PenUp)の判別を行う。なお、図15(b)の斜線部分(PenDown)がペンダウンと判別されたことを示している。
PenUp = logic1 ∩ ( /PenDown ) (式401)
第二のアルゴリズムは、logicBの定義をより安定なやり方にするものであり、図16(b)に示すようにlogicB_2を次のように定義する。
d・Wd/dt≦thsh3_2⇒d・Wd/dt > thsh3_2
のように状態遷移するときに“0”から“1”に遷移し、
d・Wd/dt>thsh3_1 ⇒ d・Wd/dt≦thsh3_1
のように状態遷移するときに“1”から“0”に遷移する。
このようにlogicB_2を定めることにより、第一のアルゴリズムと同様に、次の論理式を用いてペンダウン(PenDown)及びペンアップ(PenUp)の判別を行う。なお、図16(b)の斜線部分(PenDown)がペンダウンと判別されたことを示している。
PenUp =logic1∩(/PenDown) (式403)
以上のように、第一のアルゴリズム乃至第二のアルゴリズムによって、遮光量S_elcの時間変化、遮光幅Wdの時間変化のどちらを対象としても、ペンダウン/ペンアップの判定が可能となる。
上記した実施の形態を基に、本発明の実施例について具体的に説明する。
本実施例に係る座標入力装置のハード構成は、図1及び図2に示した概略構成において、その座標センサユニット101L,101Rを図18及び図19(a),(b),(c)に示すような構成とし、再帰反射部材103を図20及び図21に示すような構成とし、また制御・座標演算ユニット102を図22に示すような構成とする。以下、これら各構成部分の詳細な説明を行う。
以上の構成において、本実施例に係る、LED131を発光させてCCD141を露光してから、ペンアップ/ペンダウン判定に至るまでの概略的なシーケンスについて、図23を参照しつつ説明する。
以下、図24を参照して、本実施例の全体的な処理について詳細に説明する。図24は、本実施例の全体的な処理を示すフローチャートである。
Ref_data_abs[i]:投光部130が投光し、かつ遮光無し(指示具105や指による入力無し)のときにラインCCD141で得られる光の強度分布
CCD_data_abs[i]:投光部130が投光し、かつ遮光あり(指示具105や指による入力有り)のときにラインCCD141で得られる光の強度分布
また、Ref_data_abs[i]、CCD_data_abs[i]からBlind_data[i]を差し引いたものを次のように定義する。
CCD_data[i]=CCD_data_abs[i]−Blind_data[i]
また、相対強度分布Norm_data[i] を、Ref_data[i]に対するCCD_data[i]の比率として次式のように定義する。
そして、図24の初めのステップS11では、次のような処理を行う。
Ref_data[i]=Ref_data_abs[i]−Blind_data[i]…(式501)
を計算する。これで基本的な初期設定は終わる。
CCD_data[i]=CCD_data_abs[i]−Blind_data[i] …(式502)
の計算を行う。
Norm_data[i]=CCD_data[i]/Ref_data[i]…(式503)
を計算する(図6参照)。
以下、相対強度分布Norm_data[i]から遮光位置Npvを算出する手法について詳細に説明する。
Np = Nr + (Nf−Nr)/2
のように計算してもよいが、そうすると、最小の分解能が画素間隔(整数)になってしまう。すなわち画素ピッチで量子化された値となってしまう。そこで、より細かく検出するために、各画素の1つ前の画素のレベルを結んだ直線が閾値をよぎるところを小数で表現される仮想の画素番号として計算する。
Nrv=Nr-1+(Vthr −Lr-1)/(Lr −Lr-1)
Nfv=Nf-1+(Vthr−Lf-1)/(Lf−Lf−1)
と計算でき、仮想中心画素Sは、
Npv=Nrv+(Nfv−Nrv)/2
で決定される。ここで表現されるNpvが、この波形から求めた遮光位置そのものである。
tanθ=(L5*Npv+L4)*Npv+L3)*Npv+L2)*Npv+L1)*Npv+L0
で表すことができる。
ステップS16では、上述のようにして得られた入射角度のデータから座標を算出する。
x=(Ds/2)*(tanθL+tanθR)
/(1+(tanθL*tanθR))
y=−(Ds/2)*(tanθR−tanθL−(2*tanθL*tanθR))/(1+(tanθL*tanθR))+P0Y
で計算される。
通常、この種の遮光型座標入力装置においては、図25に示すように、閾値Vth_sh、Vth_pudを設定し、Norm_data[i]がVth_sh以下になったら有効な遮光有りと判定し、Norm_data[i]がVth_pud以下になったらペンダウンと判定するような方法を想定するが、前述のように現実的でない場合が多い。
PenUp=logic1∩(/PenDown)
また、PenDownが所定の時間T0より長い場合は、logicA、logicB_1を強制的に“0”に設定し、誤動作を防止する。
102 制御演算ユニット
103 再帰反射部材
104 座標入力面
105 指示具(ペン)
130 投光部
140 受光部
Claims (11)
- 入力面の面方向に沿って光を投光する投光部と、前記投光部からの光を反射する反射部と、前記反射部からの反射光を画素単位で受光して該反射光の光強度分布を検出する受光部とを備え、前記入力面上から入力して該入力面を指し示す指示入力手段によって前記入力面上の光が遮られる遮光部分の位置を前記受光部から出力されるデータを基に検出して、該遮光部分の位置の座標を求める遮光型座標入力装置において、
前記入力面上に前記遮光部分が存在するときの光強度分布と前記遮光部分が存在しないときの光強度分布との差分を画素方向に加算合計した第一の遮光量、または前記入力面上に前記遮光部分が存在するときの光強度分布を前記遮光部分が存在しないときの光強度分布で規格化した分布波形の遮光によって変化した部分を画素方向に加算合計した第二の遮光量を計算する計算手段と、
前記計算手段によって計算された第一の遮光量の時間変化または第二の遮光量の時間変化に基づいて、前記指示入力手段の入力状態がペンアップ状態であるか、あるいはペンダウン状態であるかを判定する判定手段を備えたことを特徴とする遮光型座標入力装置。 - 入力面の面方向に沿って光を投光する投光部と、前記投光部からの光を反射する反射部と、前記反射部からの反射光を画素単位で受光して該反射光の光強度分布を検出する受光部とを備え、前記入力面上から入力して該入力面を指し示す指示入力手段によって前記入力面上の光が遮られる遮光部分の位置を前記受光部から出力されるデータを基に検出して、該遮光部分の位置の座標を求める遮光型座標入力装置において、
前記入力面上に前記遮光部分が存在するときの光強度分布と前記遮光部分が存在しないときの光強度分布との差分が所定のレベルを超える画素範囲の幅の時間変化、または前記入力面上に前記遮光部分が存在するときの光強度分布を前記遮光部分が存在しないときの光強度分布で規格化した分布波形の遮光による変化が所定のレベルを超える画素範囲の幅の時間変化に基づいて、前記指示入力手段の入力状態がペンアップ状態であるか、あるいはペンダウン状態であるかを判定する判定手段を備えたことを特徴とする遮光型座標入力装置。 - 前記判定手段は、前記第一の遮光量が成す時間変化の大きさが所定の閾値以下で、かつ前記時間変化が極大値となる時点と、該時点以後最初の極小値となる時点との間で決まる期間内にあるときのみ前記ペンダウン状態と判定し、前記ペンダウン状態と判定されないときには前記ペンアップ状態と判定することを特徴とする請求項1に記載の遮光型座標入力装置。
- 前記判定手段は、前記第一の遮光量が所定の閾値より大きい場合のみ、前記指示入力手段の入力状態が前記ペンアップ状態にあるか、あるいは前記ペンダウン状態であるかを判定することを特徴とする請求項1に記載の遮光型座標入力装置。
- 前記判定手段は、前記第二の遮光量が成す時間変化の大きさが所定の閾値以下で、かつ前記時間変化が極大値となる時点と、該時点以後最初の極小値となる時点との間で決まる期間内にあるときのみ前記ペンダウン状態と判定し、前記ペンダウン状態と判定されないときには前記ペンアップ状態と判定することを特徴とする請求項2に記載の遮光型座標入力装置。
- 前記判定手段は、前記第二の遮光量が所定の閾値より大きい場合のみ、前記指示入力手段の入力状態が前記ペンアップ状態にあるか、あるいは前記ペンダウン状態であるかを判定することを特徴とする請求項2に記載の遮光型座標入力装置。
- 前記判定手段は、前記第一の幅が成す時間変化の大きさが所定の閾値以下で、かつ前記時間変化が極大値となる時点と、該時点以後最初の極小値となる時点との間で決まる期間内にあるときのみ前記ペンダウン状態と判定し、前記ペンダウン状態と判定されないときには前記ペンアップ状態と判定することを特徴とする請求項1に記載の座標入力装置。
- 前記判定手段は、前記第二の幅が成す時間変化の大きさが所定の閾値以下で、かつ前記時間変化が極大値となる時点と、該時点以後最初の極小値となる時点との間で決まる期間内にあるときのみ前記ペンダウン状態と判定し、前記ペンダウン状態と判定されないときには前記ペンアップ状態と判定することを特徴とする請求項2に記載の座標入力装置。
- 前記判定手段は、前記ペンダウン状態と判定した期間が所定の期間より長い場合に、該所定の期間に至った段階で前記ペンアップ状態と判定することを特徴とする請求項1乃至8のいずれかに記載の遮光型座標入力装置。
- 入力面の面方向に沿って光を投光する投光部と、前記投光部からの光を反射する反射部と、前記反射部からの反射光を画素単位で受光して該反射光の光強度分布を検出する受光部とを備え、前記入力面上から入力して該入力面を指し示す指示入力手段によって前記入力面上の光が遮られる遮光部分の位置を前記受光部から出力されるデータを基に検出して、該遮光部分の位置の座標を求める遮光型座標入力装置の座標入力方法であって、
前記入力面上に前記遮光部分が存在するときの光強度分布と前記遮光部分が存在しないときの光強度分布との差分を画素方向に加算合計した第一の遮光量、または前記入力面上に前記遮光部分が存在するときの光強度分布を前記遮光部分が存在しないときの光強度分布で規格化した分布波形の遮光によって変化した部分を画素方向に加算合計した第二の遮光量を計算し、
前記計算された第一の遮光量の時間変化または第二の遮光量の時間変化に基づいて、前記指示入力手段の入力状態がペンアップ状態であるか、あるいはペンダウン状態であるかを判定することを特徴とする遮光型座標入力装置の座標入力方法。 - 入力面の面方向に沿って光を投光する投光部と、前記投光部からの光を反射する反射部と、前記反射部からの反射光を画素単位で受光して該反射光の光強度分布を検出する受光部とを備え、前記入力面上から入力して該入力面を指し示す指示入力手段によって前記入力面上の光が遮られる遮光部分の位置を前記受光部から出力されるデータを基に検出して、該遮光部分の位置の座標を求める遮光型座標入力装置の座標入力方法であって、
前記入力面上に前記遮光部分が存在するときの光強度分布と前記遮光部分が存在しないときの光強度分布との差分が所定のレベルを超える画素範囲の幅の時間変化、または前記入力面上に前記遮光部分が存在するときの光強度分布を前記遮光部分が存在しないときの光強度分布で規格化した分布波形の遮光による変化が所定のレベルを超える画素範囲の幅の時間変化に基づいて、前記指示入力手段の入力状態がペンアップ状態であるか、あるいはペンダウン状態であるかを判定することを特徴とする遮光型座標入力装置の座標入力方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004166340A JP4429083B2 (ja) | 2004-06-03 | 2004-06-03 | 遮光型座標入力装置及びその座標入力方法 |
| US11/145,118 US7525536B2 (en) | 2004-06-03 | 2005-06-03 | Coordinate input device, control method therefor, and control program for implementing the method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004166340A JP4429083B2 (ja) | 2004-06-03 | 2004-06-03 | 遮光型座標入力装置及びその座標入力方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005346503A JP2005346503A (ja) | 2005-12-15 |
| JP2005346503A5 JP2005346503A5 (ja) | 2007-07-19 |
| JP4429083B2 true JP4429083B2 (ja) | 2010-03-10 |
Family
ID=35498808
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004166340A Expired - Fee Related JP4429083B2 (ja) | 2004-06-03 | 2004-06-03 | 遮光型座標入力装置及びその座標入力方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7525536B2 (ja) |
| JP (1) | JP4429083B2 (ja) |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4757144B2 (ja) * | 2006-08-22 | 2011-08-24 | キヤノン株式会社 | 座標入力装置及びその制御方法、プログラム |
| CN101460986B (zh) * | 2006-11-29 | 2011-11-16 | 松下电器产业株式会社 | 视频显示装置、视频显示方法 |
| JP2008146463A (ja) * | 2006-12-12 | 2008-06-26 | Mitsubishi Electric Corp | 位置検出装置 |
| TW201001258A (en) * | 2008-06-23 | 2010-01-01 | Flatfrog Lab Ab | Determining the location of one or more objects on a touch surface |
| TW201005606A (en) | 2008-06-23 | 2010-02-01 | Flatfrog Lab Ab | Detecting the locations of a plurality of objects on a touch surface |
| TW201007530A (en) | 2008-06-23 | 2010-02-16 | Flatfrog Lab Ab | Detecting the location of an object on a touch surface |
| TW201009671A (en) * | 2008-08-21 | 2010-03-01 | Tpk Touch Solutions Inc | Optical semiconductor laser touch-control device |
| US8188986B2 (en) * | 2008-09-23 | 2012-05-29 | Avago Technologies Ecbu Ip (Singapore) Pte. Ltd. | User input device with dynamic ambient light calibration |
| SE533704C2 (sv) | 2008-12-05 | 2010-12-07 | Flatfrog Lab Ab | Pekkänslig apparat och förfarande för drivning av densamma |
| TWI399678B (zh) * | 2009-04-15 | 2013-06-21 | Raydium Semiconductor Corportation | 光學式觸控裝置及其運作方法 |
| DE102009021375A1 (de) * | 2009-05-14 | 2010-11-18 | Marc Leppla | Sensor zum Messen einer Lichtgröße und Verfahren zum Kalibrieren eines Monitors |
| TWI501121B (zh) * | 2009-07-21 | 2015-09-21 | Pixart Imaging Inc | 手勢辨識方法及使用該方法之觸控系統 |
| JP5326989B2 (ja) * | 2009-10-26 | 2013-10-30 | セイコーエプソン株式会社 | 光学式位置検出装置および位置検出機能付き表示装置 |
| JP5366789B2 (ja) * | 2009-12-18 | 2013-12-11 | キヤノン株式会社 | 入力指示具及びその制御方法、並びに座標入力装置 |
| JP5342484B2 (ja) * | 2010-03-24 | 2013-11-13 | 株式会社日立ソリューションズ | 座標入力装置及びプログラム |
| JP2011248041A (ja) * | 2010-05-26 | 2011-12-08 | Seiko Epson Corp | 取り付け装置及び投写型表示装置 |
| KR101123511B1 (ko) * | 2010-07-19 | 2012-03-12 | 엘지이노텍 주식회사 | 카메라 모듈 및 그를 구비한 광학 터치 스크린 |
| KR101150018B1 (ko) * | 2010-08-02 | 2012-05-31 | 엘지이노텍 주식회사 | 카메라 모듈 및 그를 이용한 광학 터치 스크린 |
| KR20120012571A (ko) | 2010-08-02 | 2012-02-10 | 엘지이노텍 주식회사 | 광학 터치 스크린 및 그의 조립 방법 |
| KR101210702B1 (ko) * | 2010-08-17 | 2012-12-10 | 엘지이노텍 주식회사 | 카메라 모듈 및 그를 이용한 광학 터치 스크린 |
| KR101320109B1 (ko) | 2010-10-26 | 2013-10-18 | 엘지디스플레이 주식회사 | 평판 표시장치용 인-셀 터치 패널 |
| KR101351418B1 (ko) * | 2010-10-26 | 2014-01-15 | 엘지디스플레이 주식회사 | 적외선 센서 모듈을 이용한 표시 장치 및 그의 구동 방법 |
| JP5806573B2 (ja) * | 2011-09-28 | 2015-11-10 | キヤノン株式会社 | 座標入力装置およびその制御方法、座標入力システム |
| JP5865053B2 (ja) * | 2011-12-15 | 2016-02-17 | キヤノン株式会社 | 座標入力装置、座標入力装置の制御方法、およびプログラム |
| TWI479391B (zh) * | 2012-03-22 | 2015-04-01 | Wistron Corp | 光學式觸控裝置及判斷觸控座標之方法 |
| TWI588560B (zh) | 2012-04-05 | 2017-06-21 | 布萊恩荷登視覺協會 | 用於屈光不正之鏡片、裝置、方法及系統 |
| US10168835B2 (en) | 2012-05-23 | 2019-01-01 | Flatfrog Laboratories Ab | Spatial resolution in touch displays |
| US9201250B2 (en) | 2012-10-17 | 2015-12-01 | Brien Holden Vision Institute | Lenses, devices, methods and systems for refractive error |
| HK1212194A1 (en) | 2012-10-17 | 2016-06-10 | Brien Holden Vision Institute | Lenses, devices, methods and systems for refractive error |
| US10019113B2 (en) | 2013-04-11 | 2018-07-10 | Flatfrog Laboratories Ab | Tomographic processing for touch detection |
| WO2015005847A1 (en) | 2013-07-12 | 2015-01-15 | Flatfrog Laboratories Ab | Partial detect mode |
| JP2015079485A (ja) * | 2013-09-11 | 2015-04-23 | 株式会社リコー | 座標入力システム、座標入力装置、座標入力方法及びプログラム |
| WO2015108480A1 (en) | 2014-01-16 | 2015-07-23 | Flatfrog Laboratories Ab | Improvements in tir-based optical touch systems of projection-type |
| US10146376B2 (en) | 2014-01-16 | 2018-12-04 | Flatfrog Laboratories Ab | Light coupling in TIR-based optical touch systems |
| CN103813022B (zh) * | 2014-03-06 | 2016-03-30 | 联想(北京)有限公司 | 一种信息处理方法及电子设备 |
| EP3161594A4 (en) | 2014-06-27 | 2018-01-17 | FlatFrog Laboratories AB | Detection of surface contamination |
| CN107209608A (zh) | 2015-01-28 | 2017-09-26 | 平蛙实验室股份公司 | 动态触摸隔离帧 |
| US10318074B2 (en) | 2015-01-30 | 2019-06-11 | Flatfrog Laboratories Ab | Touch-sensing OLED display with tilted emitters |
| EP3537269A1 (en) | 2015-02-09 | 2019-09-11 | FlatFrog Laboratories AB | Optical touch system |
| WO2016140612A1 (en) | 2015-03-02 | 2016-09-09 | Flatfrog Laboratories Ab | Optical component for light coupling |
| US10524592B2 (en) | 2015-12-01 | 2020-01-07 | Black & Decker Inc. | Picture hanging device |
| JP2018536944A (ja) | 2015-12-09 | 2018-12-13 | フラットフロッグ ラボラトリーズ アーベーFlatFrog Laboratories AB | 改善されたスタイラスの識別 |
| BR112018010303B1 (pt) | 2015-12-14 | 2022-08-23 | Société Des Produits Nestlé S.A | Composições nutricional sintéticas e usos das mesmas para prevenir, reduzir o risco, ou mitigar uma trajetória de mielinização de novo abaixo de ideal |
| US10254861B2 (en) * | 2016-03-08 | 2019-04-09 | Egalax_Empia Technology Inc. | Stylus for providing tilt angle and axial direction and control method thereof |
| WO2018096430A1 (en) | 2016-11-24 | 2018-05-31 | Flatfrog Laboratories Ab | Automatic optimisation of touch signal |
| KR102495467B1 (ko) | 2016-12-07 | 2023-02-06 | 플라트프로그 라보라토리즈 에이비 | 개선된 터치 장치 |
| CN116679845A (zh) | 2017-02-06 | 2023-09-01 | 平蛙实验室股份公司 | 触摸感测装置 |
| US20180275830A1 (en) | 2017-03-22 | 2018-09-27 | Flatfrog Laboratories Ab | Object characterisation for touch displays |
| EP4036697B1 (en) | 2017-03-28 | 2026-01-07 | FlatFrog Laboratories AB | Optical touch sensing apparatus |
| WO2019045629A1 (en) | 2017-09-01 | 2019-03-07 | Flatfrog Laboratories Ab | IMPROVED OPTICAL COMPONENT |
| US11567610B2 (en) | 2018-03-05 | 2023-01-31 | Flatfrog Laboratories Ab | Detection line broadening |
| JP7014009B2 (ja) * | 2018-03-29 | 2022-02-01 | セイコーエプソン株式会社 | 操作デバイス、位置検出システム及び操作デバイスの制御方法 |
| US12055969B2 (en) | 2018-10-20 | 2024-08-06 | Flatfrog Laboratories Ab | Frame for a touch-sensitive device and tool therefor |
| WO2020153890A1 (en) | 2019-01-25 | 2020-07-30 | Flatfrog Laboratories Ab | A videoconferencing terminal and method of operating the same |
| ES2991658T3 (es) | 2019-11-25 | 2024-12-04 | Flatfrog Lab Ab | Un aparato táctil |
| US12282653B2 (en) | 2020-02-08 | 2025-04-22 | Flatfrog Laboratories Ab | Touch apparatus with low latency interactions |
| JP7681911B2 (ja) | 2020-02-10 | 2025-05-23 | フラットフロッグ ラボラトリーズ アーベー | 改良型タッチ検知装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4507557A (en) * | 1983-04-01 | 1985-03-26 | Siemens Corporate Research & Support, Inc. | Non-contact X,Y digitizer using two dynamic ram imagers |
| US5420637A (en) * | 1989-01-16 | 1995-05-30 | I Sight, Inc. | Dynamic image representation system |
| US5325524A (en) * | 1989-04-06 | 1994-06-28 | Digital Equipment Corporation | Locating mobile objects in a distributed computer system |
| GB8910085D0 (en) * | 1989-05-03 | 1989-06-21 | British Telecomm | Mobile communications system |
| US5095480A (en) * | 1989-06-16 | 1992-03-10 | Fenner Peter R | Message routing system for shared communication media networks |
| US5159592A (en) * | 1990-10-29 | 1992-10-27 | International Business Machines Corporation | Network address management for a wired network supporting wireless communication to a plurality of mobile users |
| US5315636A (en) * | 1991-06-28 | 1994-05-24 | Network Access Corporation | Personal telecommunications system |
| CA2079827C (en) * | 1991-12-09 | 2003-08-19 | Theresa Chen Yen Wang | Mobile unit tracking system |
| JPH05173699A (ja) | 1991-12-20 | 1993-07-13 | Fujitsu Ltd | 座標入力装置 |
| US5517618A (en) * | 1992-02-10 | 1996-05-14 | Matsushita Electric Industrial Co., Ltd. | Mobile migration communications control device |
| US5442633A (en) * | 1992-07-08 | 1995-08-15 | International Business Machines Corporation | Shortcut network layer routing for mobile hosts |
| JP3624070B2 (ja) * | 1997-03-07 | 2005-02-23 | キヤノン株式会社 | 座標入力装置及びその制御方法 |
| JP2000105671A (ja) | 1998-05-11 | 2000-04-11 | Ricoh Co Ltd | 座標入力/検出装置および電子黒板システム |
| JP4083941B2 (ja) | 1999-09-03 | 2008-04-30 | 株式会社リコー | 座標入力装置 |
| JP3905670B2 (ja) | 1999-09-10 | 2007-04-18 | 株式会社リコー | 座標入力検出装置、情報記憶媒体及び座標入力検出方法 |
| JP4060040B2 (ja) | 2000-05-10 | 2008-03-12 | 株式会社リコー | 情報入力装置、情報入力システム、入力情報識別方法、座標入力/検出装置、ハネ/トメ識別方法及び記憶媒体 |
| JP4043178B2 (ja) | 2000-09-12 | 2008-02-06 | 株式会社リコー | 座標入力装置および座標入力方法 |
| JP4560224B2 (ja) | 2001-03-13 | 2010-10-13 | 株式会社リコー | 情報入力装置、情報入出力システム、プログラム及び記憶媒体 |
| JP3798643B2 (ja) | 2001-03-30 | 2006-07-19 | 株式会社ケンウッド | タッチパネル制御装置ならびにタッチパネル制御用プログラム |
| JP2002351615A (ja) | 2001-05-24 | 2002-12-06 | Ricoh Co Ltd | ディスプレイ装置 |
| US6433543B1 (en) * | 2002-01-04 | 2002-08-13 | Mohsen Shahinpoor | Smart fiber optic magnetometer |
-
2004
- 2004-06-03 JP JP2004166340A patent/JP4429083B2/ja not_active Expired - Fee Related
-
2005
- 2005-06-03 US US11/145,118 patent/US7525536B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005346503A (ja) | 2005-12-15 |
| US7525536B2 (en) | 2009-04-28 |
| US20060007185A1 (en) | 2006-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4429083B2 (ja) | 遮光型座標入力装置及びその座標入力方法 | |
| JP4125200B2 (ja) | 座標入力装置 | |
| JP4442877B2 (ja) | 座標入力装置およびその制御方法 | |
| US8115753B2 (en) | Touch screen system with hover and click input methods | |
| JP4405766B2 (ja) | 座標入力装置、座標入力方法 | |
| JP4891179B2 (ja) | 座標入力装置、座標入力方法 | |
| JP4185825B2 (ja) | 座標入力装置及びその制御方法、情報処理装置、プログラム | |
| JP5366789B2 (ja) | 入力指示具及びその制御方法、並びに座標入力装置 | |
| JP4478559B2 (ja) | 座標入力装置、座標入力方法、プログラムおよび記憶媒体 | |
| JP2006099273A (ja) | 座標入力装置及びその方法 | |
| JP2004272353A (ja) | 座標入力装置 | |
| JP4401737B2 (ja) | 座標入力装置及びその制御方法、プログラム | |
| JP2005165830A (ja) | 光学式座標入力装置 | |
| JP2005173684A (ja) | 光学式座標入力装置 | |
| JP5049747B2 (ja) | 座標入力装置及びその制御方法、プログラム | |
| JP2005215860A (ja) | 遮光型座標入力装置 | |
| JP2006059153A (ja) | 光学式座標入力装置 | |
| JP5865053B2 (ja) | 座標入力装置、座標入力装置の制御方法、およびプログラム | |
| JP4423003B2 (ja) | 座標入力装置及びその制御方法、プログラム | |
| JP2005071022A (ja) | 座標入力装置、座標入力方法 | |
| JP2006018566A (ja) | 光学式座標入力装置 | |
| US20170052642A1 (en) | Information processing apparatus, information processing method, and storage medium | |
| JP2007072587A (ja) | 座標入力装置、座標入力装置の制御方法、制御プログラム及び記憶媒体 | |
| JP2006260474A (ja) | 遮光型座標入力装置 | |
| JP2006350908A (ja) | 光学式情報入力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060418 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070531 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070531 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090805 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091002 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091208 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091215 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4429083 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131225 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |