JP4313755B2 - 再生信号の評価方法および光ディスク装置 - Google Patents
再生信号の評価方法および光ディスク装置 Download PDFInfo
- Publication number
- JP4313755B2 JP4313755B2 JP2004377369A JP2004377369A JP4313755B2 JP 4313755 B2 JP4313755 B2 JP 4313755B2 JP 2004377369 A JP2004377369 A JP 2004377369A JP 2004377369 A JP2004377369 A JP 2004377369A JP 4313755 B2 JP4313755 B2 JP 4313755B2
- Authority
- JP
- Japan
- Prior art keywords
- bit
- target
- seat
- value
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
































































Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/18—Error detection or correction; Testing, e.g. of drop-outs
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10083—PR1 or PR(1,1,), i.e. partial response class 1, polynomial 1+D
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10092—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom partial response PR(1,1,1,1)
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10101—PR2 or PR(1,2,1), i.e. partial response class 2, polynomial (1+D)2=1+2D+D2
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10111—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom partial response PR(1,2,2,1)
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/1012—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom partial response PR(1,2,2,2,1)
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10129—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom partial response PR(1,2,3,3,2,1)
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10046—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter
- G11B20/10055—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom
- G11B20/10166—Improvement or modification of read or write signals filtering or equalising, e.g. setting the tap weights of an FIR filter using partial response filtering when writing the signal to the medium or reading it therefrom partial response PR(3,4,4,3)
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/10009—Improvement or modification of read or write signals
- G11B20/10268—Improvement or modification of read or write signals bit detection or demodulation methods
- G11B20/10287—Improvement or modification of read or write signals bit detection or demodulation methods using probabilistic methods, e.g. maximum likelihood detectors
- G11B20/10296—Improvement or modification of read or write signals bit detection or demodulation methods using probabilistic methods, e.g. maximum likelihood detectors using the Viterbi algorithm
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B20/00—Signal processing not specific to the method of recording or reproducing; Circuits therefor
- G11B20/10—Digital recording or reproducing
- G11B20/12—Formatting, e.g. arrangement of data block or words on the record carriers
- G11B2020/1264—Formatting, e.g. arrangement of data block or words on the record carriers wherein the formatting concerns a specific kind of data
- G11B2020/1288—Formatting by padding empty spaces with dummy data, e.g. writing zeroes or random data when de-icing optical discs
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B2220/00—Record carriers by type
- G11B2220/20—Disc-shaped record carriers
- G11B2220/25—Disc-shaped record carriers characterised in that the disc is based on a specific recording technology
- G11B2220/2537—Optical discs
- G11B2220/2541—Blu-ray discs; Blue laser DVR discs
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/004—Recording, reproducing or erasing methods; Read, write or erase circuits therefor
- G11B7/005—Reproducing
Description
図2はRLL(1,7)コードにおいて,PR(1,2,2,1)クラスを使ってデコードする場合のビット誤りのパターンについて,その一部をまとめたものである。この場合,クラスを表現するビット数(以下クラスビット数Nと呼ぶ)が4であるので,1ビットエラーした影響を考慮するためには7ビット(2N−1)のパターンについて考えればよい。このとき,正パターンのセンタービットが異なるパターンを誤パターンと呼び,正パターン及び誤パターンがそれぞれランレングス制限を満足する条件を抽出すると,図に示すように,1ビット誤りに対するパターンの組み合わせは8通りある。正パターン及び誤パターンの目標信号レベルの差の2乗値を時刻ごとに加算した値は両者のユークリッド距離と呼ばれ,1ビットエラーのケースでは,(12+22+22+12=14)14となる。目標信号の振幅が2になるように規格化した場合には,ユークリッド距離は1.11である。ユークリッド距離とは2つビット・パターンに対する目標値の時刻による移り変わりを,M次元(この場合M=4)のベクトルと捉え,それらのベクトルを位置ベクトルとする空間上の2つの点の距離と考えることもできる。2ビットエラーについて同様にまとめると,12通りあって,ユークリッド距離は14である。同様にして,より複雑なエラーパターンを考えると,それぞれユークリッド距離は,16,18,20,22,…と無限につづく。統計上,これら全てのパターンのエラーが発生することになる。しかしながら,こうした全てのエラーパターンを含めて信号品質を評価するには,膨大な処理が必要となり,とても光ディスクドライブに搭載できるものではない。ここで,ユークリッド距離は正パターンと誤パターンの距離なので,エラー発生のし難さを示す指標と考えてよい。実際,エラー訂正が可能な範囲,例えば,ビットエラー率が約10-4以下の範囲では,最小ユークリッド距離のパターンでのエラーが支配的である。そこで,最小ユークリッド距離のパターンのみを評価すれば,信号品質の評価には十分であるといえる。MLSEは最小ユークリッド距離パターン,PR(1,2,2,1)では1Tエッジシフトのみに着目して,場所ごとのエラーの発生しやすさの分布を測定し,正規分布に近似してその標準偏差を評価するものである。
(課題1)目標信号レベルが再生信号に応じて適応的に変化するPRMLチャネルに対応した再生信号の評価指標及びそれを用いた光ディスク装置の提供。
(課題2)最小ランレングスの組み合わせデータパターンに対応した再生信号の評価指標及びそれを用いた光ディスク装置の提供。
MLSEが可変の目標レベルに対応できない理由は,デコード結果である正ビット列とそれが1ビットシフトした誤ビット列に対応した目標信号の生成と,再生信号とのユークリッド距離の算出が固定目標レベルに基づいているからである。従って,再生信号に応じて適応的に変化する目標レベルを基準として,目標信号の生成と,ユークリッド距離の算出を可能にすれば,課題は解決される。前者については,正誤ビット列から目標レベルを構成するビット列を取り出し,これに対応した目標信号レベルを逐次目標信号レベルテーブルからロードすることにより実現できる。可変の目標レベルに対応した目標信号が生成できれば,後者のユークリッド距離の算出は,各時刻において再生信号と目標信号の差の2乗値を加算することにより求めることができる。MLSEの定義に従うと,これらの2つのユークリッド距離の差を基準のユークリッド距離で規格化する必要がある。ここで,基準のユークリッド距離として,変化する目標レベルに対応して,平均値と演算することによって算出することでも,正誤ビット列から生成した目標信号のユークリッド距離を算出することでも対応できる。演算量を少なくする意味では,前者の方が優れる。
2つのビット・パターン“pat1”と“pat2”のユークリッド距離をEDB(pat1,pat2)とすると定義によって,以下の式で表される。

評価指標を規格化するための基準ユークリッド距離は,1ビットエラーパターンに対する,ユークリッド距離の平均値で以下のように定義する。
再生信号と指定ビット・パターン“pat”の間のユークリッド距離ED(pat)は次の式で表される。
S-SEATの値はPRMLに対応するエッジ・シフト値D及びその標準偏差σとして,以下により求める。
(式D-7)及び(式D-8)を用いる場合,目標信号レベルが再生信号に応じて適応的に変化するPRMLチャネルでは,ユークリッド距離がパターンに依存する場合や媒体の感度むら等により信号振幅やアシンメトリ値が時間とともに変化する場合等では,その時刻における,より正確な評価値を得ることができるというメリットがある。ただし,LSI等に回路化した場合には高速動作するブロックが増加するため,消費電力が増加するというデメリットが発生するので注意が必要である。目標信号レベルが固定のPRMLチャネルの場合には,基準ユークリッド距離dminも固定値となるので,(式D-2)や(式D-7)によるdmin値の算出の必要はなく,予め算出しておいて定数を用いればよい。
(1)着目する1つのエッジのシフト量Dとして(式D-4)の代わりに,左右のエッジ・シフトに対する評価値DL及びDRがどちらも算出可能な場合に,以下の(式D-10)で表す平均シフト量を用いる場合。
(2)着目する1つのエッジのシフト量Dとして(式D-4)の代わりに,左右のエッジ・シフトに対する評価値DL及びDRがどちらも算出可能な場合に,以下の(式D-11)で表すように絶対値の小さい方のシフト量を用いる場合。
(3)着目する1つのエッジのシフト量Dとして(式D-4)の代わりに,左右のエッジ・シフトに対する評価値DL及びDRがどちらも算出可能な場合に,以下の(式D-12)で表すように絶対値の大きい方のシフト量を用いる場合。
図7はRLL(1,7)符号に対応したPR(1,2,2,1)MLデコーダの目標信号レベルについてまとめたものである。この場合PRクラスを表現するビット数が4であるので,24(=16)通りのビット列の組み合わせに対応して,目標信号レベルが定義される。このときランレングス制限によって,1T長のビットを含むビット列が除かれ,有効なビット列の数は10になる。ビタビ・デコーダ回路内には,有効なビット列のみに対応した演算器が実装される。ビタビ復号の場合には,4ビットのビット列を3ビットのステートと1ビットのデータに分けてデコードを実施する。本質的には全く同じものであるが,これを記述すると説明が煩雑になるため,以降4ビットのビット列を用いて説明を進める。ここで,ビタビ・デコーダ回路内から除かれたビット列は,物理的なマークの長さに依存したものではなく,あくまでランレングス制限を満たすために除かれたことを強調しておく。
v2 = v3 - v1 + v0 (式1)
として求めることができる。同様に,他の1Tを含むビット列のレベルは,
v4 = v6 - v2 + v0 (式2)
v5 = v7 - v2 + v0 (式3)
v10 = v8 - v13 + v15 (式4)
v11 = v9 - v13 + v15 (式5)
v13 = v12 - v14 + v15 (式6)
として求めることができる。
v2 = v15 - v13 + v0 (式7)
とすることもできる。目標レベル間に線形加算が成立している場合には,(式1)と(式7)の値は同じものになるが,一般的に,記録過程に非線形な熱干渉等の効果があるため,線形加算は成立しない。基本的には(式1)から(式6)により,1Tを含むビット列に対する目標信号レベルを算出する。好ましくは,複数の算出式を用いて求めた値に対して,それらの発生イベント数で重みをつけて,平均化する方がよい。以下の実施例で示す実験結果は,後者により目標レベルを算出する方式である。
(プロセス2)“0”の孤立インパルスの目標レベルを算出する。“0”の孤立インパルスとはビット列中に“0”を1つだけ含み,それ以外は“1”のビット列の目標レベルのことを言う。これらのビット列の値は2N−2nと表現できる。ここで,0≦n<Nであり,Nはクラスビット数である。これらのビット列の目標レベルをランレングス制限に従った目標レベルの加算,もしくは減算により求める。
(プロセス3)任意のビット列の目標レベルを求める。任意のビット列Bは,“1”の孤立インパルスの重ねあわせとして,以下の式で算出する。
同様にして,任意のビット列は,“0”の孤立インパルスの重ねあわせとして,以下の式で算出する。
(式8),(式9)からそれぞれ,“1”のインパルス,及び“0”のインパルスの重ねあわせとして,求めた目標レベルを平均化して,以下の式により目標レベルを求める。
図11にMLSE,S-SEAT,V-SEATの定義と特徴をまとめる。
上の説明では,RLL(1,7)符号に対応した,PR(1,2,2,1)デコーダに対して,S-SEATとV-SEATの算出方法について述べた。以下,RLL(1,7)符号に対応したPR(1,2,1),PR(12221),PR(123321)クラス,及びRLL(2,10)符号に対応したPR(3,4,4,3)クラスについての実施例を示す。
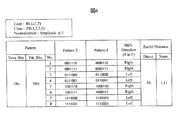
図12はRLL(1,7)符号に対応したPR(1,2,1)及びPR(a,b,c)クラスに対する1ビット誤りパターンについて,ユークリッド距離とエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは2通りあり,固定目標レベルの場合には,ユークリッド距離は6である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図13はRLL(1,7)符号に対応した目標レベルが可変のPR(a,b,c)MLデコーダの目標信号レベルをまとめたものである。S-SEATを算出する場合は,図12のビット・パターンを抽出して,前述の定義に従って評価値を算出すればよい。
図14はRLL(1,7)符号に対応したPR(1,2,1)及びPR(a,b,c)クラスに対するV-SEATの検出パターンとエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは4通りあり,固定目標レベルの場合には,ユークリッド距離は6である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図18はRLL(1,7)符号に対応した目標レベルが可変のPR(a,b,c,d,e)MLデコーダの目標信号レベルをまとめたものである。S-SEATを算出する場合は,図17のビット・パターンを抽出して,前述の定義に従って評価値を算出すればよい。
図19はRLL(1,7)符号に対応したPR(1,2,2,2,1)及びPR(a,b,c,d,e)クラスに対するV-SEATの検出パターンとエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは4通りあり,固定目標レベルの場合には,ユークリッド距離は14である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図23はRLL(1,7)符号に対応した目標レベルが可変のPR(a,b,c,d,e,f)MLデコーダの目標信号レベルをまとめたものである。S-SEATを算出する場合は,図22のビット・パターンを抽出して,前述の定義に従って評価値を算出すればよい。
図24はRLL(1,7)符号に対応したPR(1,2,3,3,2,1)及びPR(a,b,c,d,e,f)クラスに対するV-SEATの検出パターンとエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは4通りあり,固定目標レベルの場合には,ユークリッド距離は28である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図28はRLL(1,7)符号に対応した目標レベルが可変のPR(a,b,c,d)MLデコーダの目標信号レベルをまとめたものである。S-SEATを算出する場合は,図27のビット・パターンを抽出して,前述の定義に従って評価値を算出すればよい。
図29はRLL(1,7)符号に対応したPR(1,2,2,1)及びPR(a,b,c,d)クラスに対するV-SEATの検出パターンとエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは4通りあり,固定目標レベルの場合には,ユークリッド距離は10である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図32はRLL(2,10)符号に対応したPR(3,4,4,3)及びPR(a,b,c,d)クラスに対する1ビット誤りパターンについて,ユークリッド距離とエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは2通りあり,固定目標レベルの場合には,ユークリッド距離は50である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
図33はRLL(2,10)符号に対応した目標レベルが可変のPR(a,b,c,d)MLデコーダの目標信号レベルをまとめたものである。S-SEATを算出する場合は,図32のビット・パターンを抽出して,前述の定義に従って評価値を算出すればよい。
図34はRLL(2,10)符号に対応したPR(3,4,4,3)及びPR(a,b,c,d)クラスに対するV-SEATの検出パターンとエッジ・シフトの向きをまとめたものである。図に示すように,1ビット誤りに対するパターンの組み合わせは4通りあり,固定目標レベルの場合には,ユークリッド距離は50である。各パターンに対する,エッジ・シフト方向の定義は,図に示すとおりである。
a = {(v1-v0) - (v6-v7)}/2 (式11)
b = {(v3-v1) - (v4-v6)}/2 (式12)
c = {(v4-v0) - (v3-v7)}/2 (式13)
から求める。それぞれは,“1”のインパルスと“0”のインパルスの大きさを平均化したものであり,図16を参照すれば容易に算出できる。アシンメトリがゼロで,振幅が±1に規格化されている場合には,v0=+1,V7=-1である。これらを用いると例えば,v1=v0+aのように任意の目標レベルを算出することができる。全ての目標レベルの求め方は,図中に示すとおりである。
a = {(v1-v0) - (v14-v15)}/2 (式14)
b = {(v3-v1) - (v12-v14)}/2 (式15)
c = {(v6-v2) - (v9-v13)}/2 (式16)
d = {(v8-v0) - (v7-v15)}/2 (式17)
から求める。それぞれは,“1”のインパルスと“0”のインパルスの大きさを平均化したものであり,図31を参照すれば容易に算出できる。アシンメトリがゼロで,振幅が±1に規格化されている場合には,v0=+1,V15=-1である。これらを用いると例えば,v1=v0+aのように任意の目標レベルを算出することができる。全ての目標レベルの求め方は,図中に示すとおりである。
a = {(v1-v0) - (v14-v15)}/2 (式18)
b = {(v3-v1) - (v12-v14)}/2 (式19)
c = {(v6-v2) - (v9-v13)}/2 (式20)
d = {(v8-v0) - (v7-v15)}/2 (式21)
から求める。これらは,(式14)から(式17)と同じになっている。それぞれは,“1”のインパルスと“0”のインパルスの大きさを平均化したものであり,図26を参照すれば容易に算出できる。アシンメトリがゼロで,振幅が±1に規格化されている場合には,v0=+1,V15=-1である。これらを用いると例えば,v1=v0+aのように任意の目標レベルを算出することができる。全ての目標レベルの求め方は,図中に示すとおりである。
次に,S-SEAT及びV-SEATを算出するのに好適な回路の構成について,図を用いて実施例を示す。
(1)(1+D)n系列
最も基本的なクラス列であり,PR(1,1),PR(1,2,1),PR(1,3,3,1),…である。
(2)(1,2,…,2,1)系列
光ディスクで用いられることの多いPR(1,2,2,1)を含んだ系列であり,
上の系列に比較して,高域強調が少なくなっており,S/N比の改善が期待できる。
(3)インパルスレスポンス近似系列
PRクラスは基本的に再生ヘッドのインパルスレスポンスを近似したものである。
各PRクラス系列に対する,光ディスクの再生性能の測定結果をそれぞれ図44から図46に示す。
(1)クラスビット数を大きくしないことによって,目標レベル数を増やさない。
(2)畳み込み演算で定まる目標値に,ビット列に応じた補償量を加えて,目標値を補償 することによりことにより,再生信号に含まれる非線形な成分に対応する。
前述のようにビタビ・デコーダでは,最も確からしい結果に2値化結果を得るために,再生信号と目標値との差の2乗値を積算したブランチ・メトリック値を用いる。こうした,ビタビ・デコーダを2乗系と呼ぶことにする。再生信号と目標レベルの差の2乗値Δ2は
検出パターンについては,絶対値系も2乗系も全く同じものを使うことができる。
S-SEATの算出には,ユークリッド距離を絶対値系で再定義すればよい。定義を以下に示す。
2つのビット・パターン“pat1”と“pat2”のユークリッド距離をEDB(pat1,pat2)とすると定義によって,以下の式で表される。これは前述の(式D-7)と同じである。
前述のように,S-SEAT値及びV-SEAT値は(式D-8)から(式D-12)に従って拡張することが可能である。
絶対値系ビタビ・デコーダの実例に関しては,次の実施例で述べる。
最初に,RLL(2,10)符号への適用例として,DVD-RAMディスクを使った実験結果を示す。
図51はDVD-RAMディスクをPR(3,4,4,3)クラスを用いて再生したときの,MLSE,S-SEAT,V-SEATの実測結果を示している。ディスクは市販の2倍速DVD-RAM媒体をしようした。評価装置はシバソク社製LM330Aであり,レーザ波長658nm,開口数0.60である。再生回路に関しては,等化器として,DVD-RAMの規格等化条件(3タップFIRフィルターとベッセル6次ローパスフィルター)を用いた。ブースト量は5.5dBである。記録パワーを10.3mW,消去パワーを4.7mWとして,グルーブトラックに10回オーバライトし,各方式で再生信号品質を評価した。ジッター値は8.5%であった。各評価値は図に示すように,ガウス分布状の分布を持ち,横軸は検出窓幅をとして,±Tw/2にしてある。これらの評価値の定義から,±Tw/2の範囲を超えたエッジイベントが再生エラーするもので,ジッター値と同じように扱うことができる。各評価値はそれぞれ,MLSE=11.0%,S-SEAT=11.0%,V-SEAT=12.5%であった。MLSEの分布がセンターから左側にオフセツトしているのは,主に再生信号中の3T信号の大きさががPR(3,4,4,3)MLクラスの目標信号レベルよりも小さいことによる。
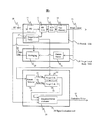
図50は本発明の光ディスク装置の構成を示す実施例である。光ディスク媒体100はモータ160により回転される。再生時にはCPU140によって指令された光強度になるようにレーザパワー/パルス制御器120は光ヘッド110内の半導体レーザ112に流す電流を制御してレーザ光114を発生させ,レーザ光114は対物レンズ111によって集光され光スポット101を光ディスク媒体100上に形成する。この光スポット101からの反射光115は対物レンズ111を介して,光検出器113で検出される。光検出器は複数に分割された光検出素子から構成されている。再生信号処理回路130は,光ヘッド110で検出された信号を用いて,光ディスク媒体100上に記録された情報を再生する。記録時には,レーザパワー/パルス制御器120は,所定の記録データを所定の記録パルス電流に変換して,パルス光が半導体レーザ112から出射されるように制御する。本発明の再生信号評価回路を構成するデコードユニット10,目標レベル学習ユニット20,信号評価ユニット30は再生信号処理回路130に内蔵される。
11 波形等化器
12 ブランチ・メトリック計算ユニット
13 ACSユニット
14 パス・メモリ
15 PR目標テーブル
16 パターン補償テーブル
17 目標レベルテーブル
18 制限付き目標レベルテーブル
19 モード制御ユニット
191 スイッチ
20 目標レベル学習ユニット
21 目標レベル算出ユニット
22 誤差算出及び平均化ユニット
24 パターン検出器
25 平均化ユニット
26 誤差算出及び動作制御ユニット
27 スイッチ
30 信号評価ユニット
31 パターン選択ユニット
32 目標レベル算出ユニット
33 目標レベル算出ユニット
34 シーケンス誤差評価ユニット
35 仮想目標レベル算出ユニット
50 再生信号
51 2値化結果
52 補正値
53 “True”パターン
54 “False”パターン
55 評価値
100 光ディスク
101 光スポット
110 光ヘッド
111 対物レンズ
112 半導体レーザ
113 光検出器
120 記録データ制御器
130 再生信号処理器
140 CPU
150 サーボ制御器
160 スピンドルモータ
170 インターフェース
180 ホストコンピュータ
Claims (4)
- 最小ランレングスが2以上の符号のPRML方式に対応した再生信号の評価方法において,
ビタビ復号器から出力される複数の目標信号レベルと,波形等化器から出力される再生信号のレベルの差異に基づき得られる値に対して,正ビット列に対する誤ビット列のエッジシフト方向に対応した符号を付加した規格化シーケンス誤差を用いて前記再生信号を評価する再生信号の評価方法であって,
前記複数の目標信号レベルを算出する際に,ランレングス制限を除いて前記最小ランレングスよりも小さいランレングスの符号に対する目標信号レベルを算出することを特徴とする再生信号の評価方法。 - 請求項1に記載の再生信号の評価方法であって,
デコードした正ビット列と該ビット列から1ビットエッジシフトさせた誤ビット列を生成する過程と,
前記正ビット列と誤ビット列から,前記目標信号レベルを参照して,それぞれ正目標信号,誤目標信号を生成する過程と,
前記正目標信号と前記再生信号の各時刻における信号レベルの差の2乗値の和を算出して,正ユークリッド距離を算出する過程と,
前記誤目標信号と前記再生信号の各時刻における信号レベルの差の2乗値の和を算出して,誤ユークリッド距離を算出する過程と,
前記正ユークリッド距離と誤ユークリッド距離の差として,ユークリッド距離差を算出する過程と,
前記目標信号レベルから,前記目標信号レベルの1ビットシフトパターンに対応する平均ユークリッド距離を算出する過程と,
前記ユークリッド距離差から前記平均ユークリッド距離を引いた後,前記平均ユークリッド距離で割って得られる値に,前記正ビット列に対する誤ビット列のエッジシフト方向に対応した符号を付加した規格化シーケンス誤差を算出する過程と,
を備えることを特徴とする再生信号の評価方法。 - 請求項2記載の再生信号の評価方法において,前記目標信号レベルは再生信号に応じて変化可能であることを特徴とする再生信号の評価方法。
- 請求項2に記載の再生信号の評価方法において,
次の(式D-1)から(式D-6) に従って算出される評価値σによって前記再生信号を評価することを特徴とする再生信号の評価方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004377369A JP4313755B2 (ja) | 2004-05-07 | 2004-12-27 | 再生信号の評価方法および光ディスク装置 |
| KR1020050007782A KR101168344B1 (ko) | 2004-05-07 | 2005-01-27 | 재생 신호의 평가방법 및 광디스크 장치 |
| US11/044,070 US7440522B2 (en) | 2004-05-07 | 2005-01-28 | Method of evaluating a readout signal, and optical disc apparatus |
| US12/285,892 US8121226B2 (en) | 2004-05-07 | 2008-10-16 | Method of evaluating a readout signal, and optical disc apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004138530 | 2004-05-07 | ||
| JP2004377369A JP4313755B2 (ja) | 2004-05-07 | 2004-12-27 | 再生信号の評価方法および光ディスク装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009000098A Division JP2009110656A (ja) | 2004-05-07 | 2009-01-05 | 再生信号の評価方法および光ディスク装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005346897A JP2005346897A (ja) | 2005-12-15 |
| JP2005346897A5 JP2005346897A5 (ja) | 2007-07-12 |
| JP4313755B2 true JP4313755B2 (ja) | 2009-08-12 |
Family
ID=35239441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004377369A Expired - Fee Related JP4313755B2 (ja) | 2004-05-07 | 2004-12-27 | 再生信号の評価方法および光ディスク装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US7440522B2 (ja) |
| JP (1) | JP4313755B2 (ja) |
| KR (1) | KR101168344B1 (ja) |
Families Citing this family (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4313755B2 (ja) * | 2004-05-07 | 2009-08-12 | 株式会社日立製作所 | 再生信号の評価方法および光ディスク装置 |
| KR20070097512A (ko) * | 2004-12-20 | 2007-10-04 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 저장 매체 상의 광학 이펙트의 분석 |
| JP4622632B2 (ja) * | 2005-03-31 | 2011-02-02 | ソニー株式会社 | 最尤復号装置、信号評価方法、再生装置 |
| US20070086315A1 (en) * | 2005-10-19 | 2007-04-19 | Mediatek Inc. | Optical disc apparatuses |
| JP4655892B2 (ja) * | 2005-11-07 | 2011-03-23 | ソニー株式会社 | 記録再生装置、記録方法 |
| US7570796B2 (en) * | 2005-11-18 | 2009-08-04 | Kla-Tencor Technologies Corp. | Methods and systems for utilizing design data in combination with inspection data |
| JP2007149180A (ja) | 2005-11-25 | 2007-06-14 | Hitachi Ltd | 光ディスク装置 |
| EP1835501A3 (en) * | 2006-03-14 | 2014-07-02 | Ricoh Company, Ltd. | Data reproduction method, data reproduction apparatus, optical disk, and data recording/reproduction apparatus |
| JP4556912B2 (ja) * | 2006-05-29 | 2010-10-06 | Tdk株式会社 | 光記録媒体の記録条件設定方法 |
| JP4597911B2 (ja) * | 2006-06-02 | 2010-12-15 | 太陽誘電株式会社 | 光記録再生方法および装置および信号処理回路および光記録再生プログラムおよび情報記録媒体 |
| JP2007335012A (ja) * | 2006-06-15 | 2007-12-27 | Fujitsu Ltd | 制御装置および記憶装置 |
| JP5089939B2 (ja) * | 2006-08-11 | 2012-12-05 | ソニーオプティアーク株式会社 | 記録再生装置、評価値演算方法 |
| JP4685745B2 (ja) * | 2006-10-23 | 2011-05-18 | 株式会社日立製作所 | 記録方法及びそれを用いた光ディスク装置 |
| RU2009103766A (ru) * | 2006-12-28 | 2010-08-10 | Панасоник Корпорэйшн (Jp) | Способ оценки носителя записи информации, носитель записи информации, способ изготовления носителя записи информации, способ обработки сигналов и устройство управления доступом |
| JPWO2009041598A1 (ja) * | 2007-09-26 | 2011-01-27 | 日本電気株式会社 | 信号品質評価装置、方法、及び、情報記録再生装置 |
| JP5057925B2 (ja) | 2007-10-18 | 2012-10-24 | 株式会社日立製作所 | デジタル情報再生方法 |
| JP5050805B2 (ja) * | 2007-11-22 | 2012-10-17 | 日本電気株式会社 | 信号品質測定装置、方法、及び、情報記録再生装置 |
| JP2009158046A (ja) * | 2007-12-27 | 2009-07-16 | Toshiba Corp | 光ディスク装置 |
| KR20100115699A (ko) * | 2008-02-28 | 2010-10-28 | 파나소닉 주식회사 | 신호 평가 방법 및 신호 평가 장치 |
| JP2009238301A (ja) * | 2008-03-27 | 2009-10-15 | Taiyo Yuden Co Ltd | データ記録評価方法及び光ディスク記録再生装置 |
| JP5081737B2 (ja) * | 2008-06-18 | 2012-11-28 | 株式会社日立製作所 | 光学的情報記録方法、光学的情報再生方法、および光ディスク装置 |
| CN101878505A (zh) | 2008-07-01 | 2010-11-03 | 松下电器产业株式会社 | 再生信号评价方法、再生信号评价装置及具备此再生信号评价装置的光盘装置 |
| KR101841897B1 (ko) | 2008-07-28 | 2018-03-23 | 케이엘에이-텐코어 코오포레이션 | 웨이퍼 상의 메모리 디바이스 영역에서 검출된 결함들을 분류하기 위한 컴퓨터-구현 방법들, 컴퓨터-판독 가능 매체, 및 시스템들 |
| KR20110081768A (ko) * | 2008-10-02 | 2011-07-14 | 파나소닉 주식회사 | 재생 신호 평가 방법, 정보 기록 매체, 재생 장치, 기록 장치 |
| JP4764932B2 (ja) | 2009-02-03 | 2011-09-07 | 株式会社日立製作所 | 再生信号の評価方法および光ディスク装置 |
| JP4764939B2 (ja) | 2009-04-14 | 2011-09-07 | 株式会社日立製作所 | 記録条件の調整方法及び光ディスク装置 |
| JP4959749B2 (ja) * | 2009-05-08 | 2012-06-27 | 株式会社日立製作所 | 記録条件の調整方法及び光ディスク装置 |
| JP5469390B2 (ja) | 2009-07-15 | 2014-04-16 | 日立コンシューマエレクトロニクス株式会社 | 再生信号評価方法及び記録調整方法 |
| JP4969620B2 (ja) * | 2009-09-02 | 2012-07-04 | 株式会社日立製作所 | 記録条件の調整方法及び光ディスク装置 |
| US20110090773A1 (en) * | 2009-10-16 | 2011-04-21 | Chih-Ching Yu | Apparatus for generating viterbi-processed data using an input signal obtained from reading an optical disc |
| JP4812881B2 (ja) * | 2010-01-20 | 2011-11-09 | 日立コンシューマエレクトロニクス株式会社 | 記録条件の調整方法及び光ディスク装置 |
| US8363530B2 (en) | 2010-04-20 | 2013-01-29 | Panasonic Corporation | Information reproduction method, information recording method, and information recording medium |
| JP5056905B2 (ja) * | 2010-06-16 | 2012-10-24 | 株式会社日立製作所 | 記録条件の調整方法、光ディスク装置および情報の記録方法 |
| US8767333B2 (en) * | 2011-09-22 | 2014-07-01 | Lsi Corporation | Systems and methods for pattern dependent target adaptation |
| JP5309197B2 (ja) * | 2011-10-21 | 2013-10-09 | 日立コンシューマエレクトロニクス株式会社 | 記録条件の調整方法及び光ディスク装置 |
| JP5427903B2 (ja) * | 2012-02-02 | 2014-02-26 | 日立コンシューマエレクトロニクス株式会社 | 記録条件の調整方法及び光ディスク装置 |
| US8432780B1 (en) * | 2012-05-10 | 2013-04-30 | Mediatek Inc. | Viterbi decoding apparatus using level information generator supporting different hardware configurations to generate level information to Viterbi decoder and related method thereof |
| TWI530942B (zh) * | 2012-06-04 | 2016-04-21 | Sony Corp | A signal quality evaluation apparatus, a signal quality evaluation method, and a reproduction apparatus |
| JP5373153B2 (ja) * | 2012-06-07 | 2013-12-18 | 日立コンシューマエレクトロニクス株式会社 | 記録条件の調整方法、光ディスク装置、および情報の記録方法 |
| US8908304B2 (en) | 2012-07-17 | 2014-12-09 | Lsi Corporation | Systems and methods for channel target based CBD estimation |
| US8824076B2 (en) | 2012-08-28 | 2014-09-02 | Lsi Corporation | Systems and methods for NPML calibration |
| US9189844B2 (en) | 2012-10-15 | 2015-11-17 | Kla-Tencor Corp. | Detecting defects on a wafer using defect-specific information |
| US9865512B2 (en) | 2013-04-08 | 2018-01-09 | Kla-Tencor Corp. | Dynamic design attributes for wafer inspection |
| US9310320B2 (en) | 2013-04-15 | 2016-04-12 | Kla-Tencor Corp. | Based sampling and binning for yield critical defects |
| US9324363B2 (en) | 2013-06-05 | 2016-04-26 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Systems and methods for floating variance branch metric calculation |
| CN113760682B (zh) * | 2021-08-20 | 2024-02-23 | 浪潮电子信息产业股份有限公司 | 一种内存信号质量评估方法、系统及装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5995561A (en) * | 1996-04-10 | 1999-11-30 | Silicon Systems, Inc. | Method and apparatus for reducing noise correlation in a partial response channel |
| JP3216609B2 (ja) * | 1998-08-13 | 2001-10-09 | 日本電気株式会社 | 再生データ検出装置 |
| JP4010086B2 (ja) | 1999-12-24 | 2007-11-21 | 日本ビクター株式会社 | ビタビ復号器 |
| JP3926688B2 (ja) * | 2001-07-19 | 2007-06-06 | 松下電器産業株式会社 | 再生信号品質評価方法および情報再生装置 |
| CN1306516C (zh) * | 2001-11-09 | 2007-03-21 | 株式会社东芝 | 信息记录/还原系统和记录校正方法 |
| JP3697409B2 (ja) | 2001-11-09 | 2005-09-21 | 株式会社東芝 | 信号品質評価方法および記録補償方法 |
| US7194674B2 (en) * | 2002-07-29 | 2007-03-20 | Sharp Kabushiki Kaisha | Adaptive waveform equalization for viterbi-decodable signal and signal quality evaluation of viterbi-decodable signal |
| JP3813931B2 (ja) * | 2003-01-31 | 2006-08-23 | 株式会社東芝 | 情報再生装置及び情報再生方法 |
| KR100505694B1 (ko) * | 2003-07-09 | 2005-08-02 | 삼성전자주식회사 | 직접 계산 방식에 의한 코드화 직교 주파수 분할 다중화수신기의 채널 상태 평가 장치 및 그 방법 |
| JP4313755B2 (ja) * | 2004-05-07 | 2009-08-12 | 株式会社日立製作所 | 再生信号の評価方法および光ディスク装置 |
-
2004
- 2004-12-27 JP JP2004377369A patent/JP4313755B2/ja not_active Expired - Fee Related
-
2005
- 2005-01-27 KR KR1020050007782A patent/KR101168344B1/ko not_active IP Right Cessation
- 2005-01-28 US US11/044,070 patent/US7440522B2/en not_active Expired - Fee Related
-
2008
- 2008-10-16 US US12/285,892 patent/US8121226B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR101168344B1 (ko) | 2012-07-25 |
| US7440522B2 (en) | 2008-10-21 |
| US8121226B2 (en) | 2012-02-21 |
| US20050249318A1 (en) | 2005-11-10 |
| KR20060042873A (ko) | 2006-05-15 |
| JP2005346897A (ja) | 2005-12-15 |
| US20090052595A1 (en) | 2009-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4313755B2 (ja) | 再生信号の評価方法および光ディスク装置 | |
| US6934233B2 (en) | Waveform equalizer for a reproduction signal obtained by reproducing marks and non-marks recorded on a recording medium | |
| US7095696B2 (en) | Recording/reproducing device | |
| JP2008047181A (ja) | 記録再生装置、評価値演算方法、評価値演算装置 | |
| JP5469390B2 (ja) | 再生信号評価方法及び記録調整方法 | |
| AU2009264850A2 (en) | Reproduction signal evaluation method, reproduction signal evaluation unit, and optical disc device adopting the same | |
| JP2002245722A (ja) | 再生信号評価装置および方法、再生装置および方法、ならびに、記録装置および方法 | |
| EP2249343B1 (en) | Adjusting method for recording condition and optical disc device | |
| US20080205221A1 (en) | Data recording evaluation method and optical disk recording and reproduction device | |
| JP2009110656A (ja) | 再生信号の評価方法および光ディスク装置 | |
| JP5170819B2 (ja) | 情報再生装置、情報記録再生装置、及び情報再生方法 | |
| US7660224B2 (en) | DC-controlled encoding for optical storage system | |
| JP4118918B2 (ja) | 信号品質評価装置、情報記録再生装置、信号品質評価方法、記録条件決定方法、信号品質評価プログラム、信号品質評価プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP4095487B2 (ja) | 情報再生方法及びそれを用いた情報再生装置 | |
| JPH09181613A (ja) | ディジタル信号再生装置および再生方法 | |
| JP4501960B2 (ja) | ビタビ検出器、及び、情報再生装置 | |
| JP4254800B2 (ja) | 再生信号評価装置および方法、再生装置および方法、ならびに、記録装置および方法 | |
| JP2007323686A (ja) | 情報再生装置、情報再生方法、及び光ディスク媒体 | |
| WO2005073963A1 (ja) | サーボ位置調整方法およびサーボ位置調整装置 | |
| JP4254801B2 (ja) | 再生信号評価装置および方法、再生装置および方法、ならびに、記録装置および方法 | |
| Pozidis et al. | A simple detection method for high-density d= 1 optical recording | |
| JP2007042181A (ja) | 自動等化器及び自動等化方法、並びに再生装置 | |
| JPH10283739A (ja) | 情報再生装置および再生方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070528 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080729 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081028 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090406 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20090414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090512 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090515 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120522 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120522 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130522 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130522 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |