<目 次>
1.装置構成
2.1トラックシーク
3.ファインシーク
4.偏心メモリ制御
5.エンベローブサーボ
6.フォーカスサーボ
1.装置構成
図2は本発明の光学的記憶装置である光ディスクドライブの回路ブロック図である。本発明の光ディスクドライブは、コントローラ10とエンクロージャ12で構成される。コントローラ10には光ディスクドライブの全体的な制御を行うMPU14、上位装置との間でコマンド及びデータのやり取りを行なうインタフェースコントローラ16、光ディスク媒体に対するデータのリード、ライトに必要な処理を行うフォーマッタ18、MPU14,インタフェースコントローラ16及びフォーマッタ18で共用されるバッファメモリ20を備える。
フォーマッタ18に対してはライト系統としてエンコーダ22とレーザダイオード制御回路24が設けられ、レーザダイオード制御回路24の制御出力はエンクロージャ12側の光学ユニットに設けたレーザダイオード30に与えられている。
レーザダイオード30を使用して記録再生を行う光ディスク、即ち書替え可能なMOカートリッジ媒体として、この実施形態にあっては128MB、230MB、540MB及び640MBのいずれかを使用することができる。このうち128MB及び230MBのMOカートリッジ媒体については、媒体上のマークの有無に対応してデータを記録するピットポジション記録(PPM記録)を採用している。
一方、高密度記録となる540MB及び640MBのMOカートリッジ媒体については、マークのエッジ即ち前縁と後縁をデータに対応させるパルス幅記録(PWM記録)を採用している。ここで、640MBと540MBの記憶容量の差はセクタ容量の違いによるもので、セクタ容量が2KBのとき640MBとなり、一方、512Bのときは540MBとなる。
このように本発明の光ディスクドライブは、128MB、230MB540MBまたは640MBの各記憶容量のMOカートリッジに対応可能である。したがって光ディスクドライブにMOカートリッジをローディングした際には、まず媒体のID部の間隔をピットの存在を示す信号から測定し、そのID間隔からMPU14において媒体の種別を認識し、種別結果をフォーマッタ18に通知することで、128MBまたは230MB媒体であればPPM記録に対応したフォーマッタ処理を行い、540MBまたは640MB媒体であればPWM記録に従ったフォーマッタ処理を行うことになる。
フォーマッタ18に対するリード系統としては、デコーダ26、リードLSI回路28が設けられる。リードLSI回路28に対しては、エンクロージャ12に設けたディテクタ32によるレーザダイオード30からのビームの戻り光の受光信号が、ヘッドアンプ34を介してID信号及びMO信号として入力されている。
リードLSI回路28にはAGC回路、フィルタ、セクタマーク検出回路、シンセサイザ及びPLL等の回路機能が設けられ、入力したID信号及びMO信号よりリードクロックとリードデータを作成し、デコーダ26に出力している。またスピンドルモータ40による媒体の記録方式としてゾーンCAVを採用していることから、リードLSI回路28に対してはMPU14より、内蔵したシンセサイザに対しゾーン対応のクロック周波数の切替制御が行われている。
ここでエンコーダ22の変調方式及びデコーダ26の復調方式は、フォーマッタ18による媒体種別に応じ、128MB及び230MBについてはPPM記録の変調及び復調方式に切り替えられる。一方、540及び640MBの媒体については、PWM記録の変調及び復調方式に切り替えられる。
MPU14に対しては、エンクロージャ12側に設けた温度センサ36の検出信号が与えられている。MPU14は、温度センサ36で検出した装置内部の環境温度に基づき、レーザダイオード制御回路24におけるリード、ライト、イレーズの各発光パワーを最適値に制御する。MPUは、ドライバ38によりヘッド部12側に設けたスピンドルモータ40を制御する。
MOカートリッジの記録再生はゾーンCAVであることから、スピンドルモータ40を例えば3600rpmの一定速度で回転させる。またMPU14は、ドライバ42を介してヘッド部12側に設けた電磁石44を制御する。電磁石44は装置内にローディングされたMOカートリッジのビーム照射側と反対側に配置されており、記録時及び消去時に媒体に外部磁界を供給する。
DSP15は、媒体に対しレーザダイオード30からのビームの位置決めを行うためのサーボ機能を実現する。このため、エンクロージャ12側の光学ユニットに媒体からのビームモードの光を受光する2分割ディテクタ46を設け、FES検出回路(フォーカスエラー信号検出回路)48が、2分割ディテクタ46の受光出力からフォーカスエラー信号E1を作成してDSP15に入力している。
またTES検出回路(トラッキングエラー信号検出回路)50が2分割ディテクタ46の受光出力からトラッキングエラー信号E2を作成し、DSP15に入力している。トラッキングエラー信号E2はTZC回路(トラックゼロクロス検出回路)45に入力され、トラックゼロクロスパルスE3を作成してDSP15に入力している。
更にエンクロージャ12側には、媒体に対しレーザビームを照射する対物レンズのレンズ位置を検出するレンズ位置センサ52が設けられ、そのレンズ位置検出信号(LPOS)E4をDSP15に入力している。DSP15は、ビーム位置決めのため、ドライバ54,58,62を介してフォーカスアクチュエータ56、レンズアクチュエータ60及びVCM64を制御駆動している。
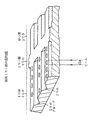
ここで光ディスクドライブにおけるエンクロージャの概略は図3のようになる。図3において、ハウジング66内にはスピンドルモータ40が設けられ、スピンドルモータ40の回転軸のハブに対しインレットドア68側よりMOカートリッジ70を挿入することで、内部のMO媒体72がスピンドルモータ40の回転軸のハブに装着されるローディングが行われる。
ローディングされたMOカートリッジ70のMO媒体72の下側には、VCM64により媒体トラックを横切る方向に移動自在なキャリッジ76が設けられている。キャリッジ76上には対物レンズ80が搭載され、固定光学系78に設けている半導体レーザからのビームをプリズム81を介して入射し、MO媒体72の媒体面にビームスポットを結像している。
対物レンズ80は図2のヘッド部12に示したフォーカスアクチュエータ56により光軸方向に移動制御され、またレンズアクチュエータ60により媒体トラックを横切る半径方向に例えば数十トラックの範囲内で移動することができる。このキャリッジ76に搭載している対物レンズ80の位置が、図2のレンズ位置センサ52により検出される。レンズ位置センサ52は対物レンズ80の光軸が直上に向かう中立位置でレンズ位置検出信号を0とし、アウタ側への移動とインナ側への移動に対しそれぞれ異なった極性の移動量に応じたレンズ位置検出信号E4を出力する。
本発明の光ディスクドライブは、光ディスク媒体としてMOカートリッジ以外に再生専用のCDを使用することもできる。図4は、図3のMOカートリッジ70の代わりにCDをローディングした状態である。CDを使用する場合には、この実施形態にあっては、予め準備されたトレイ84にCD媒体82を搭載してインレットドア68よりハウジング66内にローディングする。
トレイ84は、予めスピンドルモータ40にCD媒体82を装着するためのターンテーブル86を備えている。このためターンテーブル86にCD媒体82の中心部の穴を嵌め入れた状態でトレイ84に搭載し、光ディスクドライブにローディングする。
トレイ84に使用しているターンテーブル86としては、CD媒体82側はCD媒体82の中心の穴に対応した通常のCDディスクドライブと同じCD装着構造をもち、ターンテーブル86のスピンドルモータ40側は図3のMOカートリッジ70に使用しているハブ構造と同じものを使用している。このようなターンテーブル86を使用することで、全く別の形状寸法をもつ露出媒体であるCD媒体82であっても、トレイ84を使用してMOカートリッジ70と同様にスピンドルモータ40にローディングすることができる。
このようにCD媒体82のローディングに対応するため、図2のコントローラ10にあっては、MPU14でローディングされた媒体がCD媒体82であることを認識した場合には、フォーマッタ18、リードLSI回路28及びデコーダ26をCD対応の回路機能に切り替える。
またCD媒体専用のリード系統の回路を設け、MOカートリッジのリード系統からCD媒体のリード系統に切り替えるようにしてもよい。同時にMPU14は、CD媒体82にあっては、スピンドルモータ40による媒体回転制御が線速度一定方式(CLV方式)となることから、CDのリード系統から得られたリードクロックが基準の一定線速度となるように、ドライバ38を介してスピンドルモータ40をトラック位置に応じて回転数を変えるCLV制御とする。
もちろん本発明は、図4のようなCD媒体82の再生機能をもたない図3のMOカートリッジ70専用の光ディスクドライブであってもよいことは勿論である。
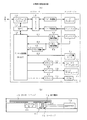
図5は図2のコントローラ10に設けたDSP15により実現されるフォーカスサーボ、レンズサーボ、VCMサーボの機能ブロック図である。まずフォーカスサーボ系はフォーカスエラー信号E1をADコンバータ88でディジタルデータに変換して取り込み、加算点90でレジスタ92にセットしたFESオフセットによる補正を施し、位相補償器94で所定の高域帯域についてゲインアップを行う位相補償を施し、PID演算器96で比例積分微分演算をフォーカスエラー信号に対し行う。
更に位相補償器100で位相補償を施した後、加算点104でレジスタ102のフォーカスオフセットを補償し、リミッタ106を介してDAコンバータ108でアナログ信号に変換し、フォーカスアクチュエータ56に電流指示値を出している。PID演算器96と位相補償器100の間にはサーボスイッチ98が設けられ、フォーカスサーボのオンオフを制御できるようにしている。
次にレンズアクチュエータ60に対するレンズサーボ系を説明する。レンズサーボ系は速度制御系、トラックサーボ系及びレンズ位置サーボ系の3つに分けられる。まず速度制御系はトラックゼロクロス信号E3をカウンタ110に入力し、トラックゼロクロス間隔の時間をクロックカウントにより求め、速度計算器112でビーム速度を求める。
速度計算器112の出力は加算点114でレジスタ116からの目標速度との偏差が取られ、サーボスイッチ118を介して位相補償器120で速度偏差についての位相補償が施された後、加算器122に与えられている。
レンズサーボのトラックサーボ系は、トラッキングエラー信号E2をADコンバータ124でディジタルデータに変換して取り込み、加算点128でレジスタ126によりセットされたTESオフセットの補正を施し、位相補障器130で位相補償を施した後、PID演算器140で比例積分、微分演算を行った後、サーボスイッチ142を介して加算器122に入力している。
更にレンズ位置サーボ系としてレンズ位置検出信号E4をADコンバータ144でディジタルデータとして取り込み、加算器146でレジスタ148によるLPOSオフセットの補正を施し、位相補償器150を位相補償を施した後、PID演算器152で比例積分微分演算を行い、サーボスイッチ156を介して加算器122に入力している。なおサーボスイッチ156の入力側にはレジスタ154によりTESオフセットキャンセルを加えることができる。
このような速度サーボ系の速度偏差信号、トラッキングサーボ系のトラッキングエラー信号、更にレンズ位置サーボ系のレンズ位置偏差信号は、加算器122で加算され、位相補償器158で位相補償が施された後、加算点160でレジスタ162によるトラックオフセットの補正を受けた後、DAコンバータ166でアナログ信号に変換され、レンズアクチュエータ60に対する電流指示値としてドライバ側に出力する。
次にVCM64のサーボ系を説明する。VCM64のサーボ系は、シーク時の目標トラック位置と現在トラック位置との偏差に基づいたフィードフォワード制御のサーボ系を構成している。まずトラックゼロクロス信号E3に基づいてカウンタ110で検出されたビームのレジスタ168による現在位置は、加算器170でレジスタ172の目標トラック位置と比較され、目標トラック位置に対する残りトラック数に応じた位置偏差信号が生成される。
この加算器170の出力は、位相補償器174で位相補償が施された後、PID演算器176で比例、積分、微分演算を受け、サーボスイッチ178を介して位相補償器180で更に位相補償を受け、加算器182を介してIIR188に与えられ、更に位相補償器190で位相補償を施した後、加算器192でレジスタ194によるVCMオフセットによる補正を受け、リミット196を介して加算器198に与えられる。
加算器198では偏心メモリ200からの読み出しによる媒体の偏心補正を行う。加算器198による偏心補正を受けたVCMサーボの位置偏差信号に対しては、レジスタ202によりインナ方向のシークとアウタ方向のシークに応じた異なった極性がセットされ、更に絶対値化回路204で絶対値化が施され、DAコンバータ206でアナログ信号に変換され、VCM64にVCM電流指示値に変換されてドライバ側に出力される。
更にVCMサーボ系の加算器182に対しては、レンズサーボ系に設けているレンズ位置サーボ系の位相補償器150の出力が分岐され、PID演算器184及びサーボスイッチ186を介して入力されている。このためサーボスイッチ186のオン状態でレンズアクチュエータ60により対物レンズを駆動してレンズシークを行うと、このときのレンズ位置検出信号に基づいて加算器146で生成されるレンズ位置偏差信号がPID演算器184及びサーボスイッチ186を介してVCM位置サーボ系の加算器182に位置偏差信号として加わる。
このためVCM64は、レンズアクチュエータ60の駆動によりレンズ位置オフセットを零とするようにキャリッジを位置制御することになる。このようなレンズアクチュエータによるレンズ位置検出信号の偏差信号に基づくサーボ制御がVCM64のサーボ系に加わることから、これを二重サーボと呼んでいる。
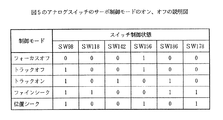
図6は図5のサーボ系における制御モードとサーボスイッチ98,118,142,156,178及び186のオンオフ状態を示す。サーボ系の制御モードはフォーカスオフモード、トラックオフモード、トラックオンモード、ファインシークモード、位置シークモードの5つに分けられる。
各モードの制御内容は図7に示すようになる。まずフォーカスオフモードはビームのトラックアクセスを停止している状態であり、サーボスイッチ98のオフによりフォーカスサーボをオフし、サーボスイッチ156のみをオンすることでレンズアクチュエータ60によりキャリッジ上の対物レンズを零位置に制御している。
トラックオフモードは、サーボスイッチ98のオンによりフォーカスサーボを有効とし、且つサーボスイッチ156をオンしてレンズアクチュエータ60による対物レンズの零位置への制御を行っている。このためトラックオフモードにあっては、ビームを停止した状態でビームの媒体に対するフォーカシングのみが可能となる。
トラックオンモードは、サーボスイッチ98をオンしてフォーカスサーボを有効とし、サーボスイッチ142をオンとすることでトラッキングエラー信号によるレンズアクチュエータ60の駆動によるオントラック制御を行う。更にサーボスイッチ186をオンとすることでVCMサーボ系にレンズ位置検出信号による位置サーボを掛けて、VCMオフセットや偏心オフセットを補償できるようにしている。
ファインシークモードは、上位装置から目標シリンダへのアクセスが指示された場合に、レンズアクチュエータ60の速度制御とVCM64のフィードフォワード制御によりビームを目標位置に移動させる制御である。即ち、サーボスイッチ98のオンによりフォーカスサーボを有効とした状態で、サーボスイッチ118のオンによりレンズアクチュエータ60の速度制御を行う。
更にサーボスイッチ178のオンにより目標トラックに対する現在トラック位置の偏差に応じたフィードフォワード制御を行う。更にサーボスイッチ186をオンすることにより、レンズ位置信号E4の位置偏差に基づいてVCM64の駆動でレンズ0位置に制御する二重サーボを掛ける。
位置シークモードはレンズアクチュエータ60によるレンズ位置制御であり、レンズを零位置に保持した状態で、VCM64を目標トラック位置に対する現在トラック位置のトラック数に応じた位置偏差信号によりビームが目標トラックに移動するように位置制御する。
即ち、サーボスイッチ98のオンによりフォーカスサーボを有効とした状態でサーボスイッチ156をオンしてレンズアクチュエータ60によりレンズを零位置に保持するレンズロックを行う。この状態でサーボスイッチ178のオンにより目標トラック位置に対する偏差を零とするようにVCM64によりキャリッジを移動し、ビームを目標トラックに位置制御する。
2.1トラックシーク制御
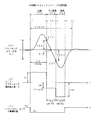
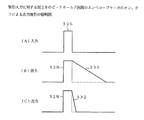
図8は上位装置から現在トラックに対しインナ側またはアウタ側の隣接するトラックを目標トラックとする1トラックシーク命令を受けた際のシーク制御におけるトラッキングエラー信号E2、レンズアクチュエータを駆動するDAコンバータ、指示電流値I2及びトラックオンモードの制御状態のタイムチャートを示している。
本発明の光ディスクドライブにおける1トラックシーク制御は、図8(A)のトラッキングエラー信号E2に示すように、シーク制御期間を加速期間210、プリ減速期間212及び減速期間214の3つの期間に分ける。更に加速期間210の終了時となる時刻t2におけるトラッキングエラー信号E2のサンプル点216の値TES1と減速期間214の開始時となる時刻t4におけるトラッキングエラー信号E2のサンプル点220の値TES2の差をビーム移動速度を示す情報として求める。このサンプル点216,220の2点の差(TES1−TES2)から図8(B)における減速期間214の減速電流の値Ib2を決定し、1トラックシークで安定にオントラックできるようにしている。
図8(B)のDAC指示電流値I2の1トラックシーク期間における加速期間210、プリ減速期間212及び減速期間214は、設計段階で予め定められ、装置のシミュレーション等の調整を通じて加速時間T1、プリ減速時間T2及び減速時間T3が各々固定的に定められている。この実施形態にあっては、トラッキングエラー信号E2を取り込むDAコンバータのサンプリング回数を1時間単位とすると、トラックピッチが1.1μmとなる高密度記録の540MB及び640MBのMOカートリッジ媒体につき、加速時間T1は7サンプル、プリ減速時間T2は2サンプル、減速時間T3は4サンプルが各々最適値として得られている。
即ち、本発明の1トラックシーク制御にあっては、最初の加速期間210を合計13サンプルとなる期間の内の7サンプルが割り当てられ、1トラックシーク期間の半分を越えた期間を加速期間210としており、この加速期間に所定の加速電流Iaを流すことで、1トラックシークであっても十分な加速を行なっている。このサンプル数は、図5のADコンバータ124のサンプリング周波数を68KHzとした場合である。
これに対し従来の1トラックシーク制御における加速期間、プリ減速期間に相当する速度0期間及び減速期間は略3分の1としており、同じ加速電流Iaを使用した場合にも従来は加速期間が全体の3分の1と短いことから、本発明の1トラックシークに比べるとビームの加速は低い。したがって本発明の1トラックシークは、加速期間210を従来の1/3を越える期間、実際には半分を越える時間T1=7サンプルにも亘って行うことで、十分なビーム移動速度の加速を行ない、これによって1トラックシーク時間の短縮を図っている。
次のプリ減速期間212にあっては、最後の減速期間214に先立って予備的に減速を行っている。この場合のプリ減速212に使用する減速電流Ibの値は、加速電流Iaに1以下の所定の係数を乗じて定めれば良い。本願発明者等の実験によると、加速電流の半分の電流をプリ減速電流Ib1とした場合に最適な1トラック制御ができた。したがって、プリ減速期間212に使用するプリ減速電流Ib1としては加速電流Iaの半分付近の値を使用することが望ましい。
プリ減速期間212に続く減速期間214の減速電流Ib2については、加速終了の時刻t2及び減速開始の時刻t4のそれぞれのサンプル点216,220で検出したトラッキングエラー信号E2の値TES1とTES2の差(TES1−TES2)とそのプリ減速時間T2から、速度Vを
V=(TES1−TES2)/T2
として求める。このようにして実際のトラッキングエラー信号E2の変化から求めた速度Vに基づき、減速電流Ib2を
Ib2=(T3/V)×ブレーキゲインGb
として求め、減速時間T3に亘ってレンズアクチュエータに流すことで、1トラックシーク終了で安定にオントラックさせることができる。
なお図8(C)のトラックオンモードの制御状態にあっては、時刻t1の1トラックシーク制御の開始でトラックサーボをオフし、時刻t6の減速終了でトラックサーボをオンに戻すことで、時刻t6で1トラック先の目標トラックにビームを安定してオントラックさせることができる。
このように本発明の1トラックシーク制御にあっては、1トラックシーク制御におけるトラッキングエラー信号E2から実際の速度を検出して減速期間における減速電流Ib2の値を決めているため、加速終了後の速度にばらつきが起きても、そのときの速度に依存した最適な減速電流Ib2を指示することができ、その結果、光ディスクドライブが異なっても安定した1トラックシークのオントラックが実現できる。
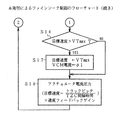
図9は図8に示した本発明の1トラックシーク制御を実現するための制御処理のフローチャートであり、図2のMPU14に対し上位装置から1トラックシークのコマンドが解読された際に、DSP15に対し1トラックシークを命令することで実行される。
図9において、まずステップS0でトラッキングエラー信号E2の上下のピーク値を一定値に正規化するためのTES感度補正値のセッティングを行なう。このTES感度正規化の補正値は、MOカートリッジを光ディスクドライブにローディングした際の初期化処理の際に、VCMまたはレンズアクチュエータによりビームを一定速度でゆっくり移動してトラッキングエラー信号を取り込み、その上下の振幅値を測定し、これを予め定めた規格振幅値との割合から補正値を求める。
例えば上下振幅の規格値をAref、実際に測定した上下ピーク値の差をAとすると、実際に得られるトラッキングエラー信号を規格値に正規化するためのTES感度の補正値αは、α=(Aref/A)で与えられる。このように媒体ローディング時の初期化処理で得られたTES感度を正規化する補正値αがステップS0で取り込まれ、以下の1トラックシーク処理におけるトラッキングエラー信号の取込みの際には、常に補正値αを乗ずることで正規化した値を使用することになる。
続いてステップS1で加速電流Iaをレンズアクチュエータに供給するためのADコンバータに対する電流指示値の出力を行なう。これによってレンズアクチュエータ60は隣接するトラックに向けてビームを加速移動させる。ステップS2にあっては、予め定めた加速時間T1の経過を判別しており、加速時間T1を経過すると、ステップS3でそのときのトラッキングエラー信号TESをサンプリングしてTES1とする。もちろん、このTES1についてはTES感度を正規化するための補正係数αの乗算による補正が行われる。
次にステップS4で、例えば加速電流Iaの半分のプリ減速電流Ia/2をレンズアクチュエータに供給してプリ減速を行なうための電流出力の指示を行なう。このプリ減速状態はステップS5で予め定めたプリ減速時間T2の経過を判別しており、T2を経過すると、ステップS6で再度トラッキングエラー信号E2をサンプリングしてTES2とする。
続いてステップS7で速度Vを、ステップS3及びS6で取り込んだトラッキングエラー信号の値TES1,TES2から所定のプリ減速時間T2を用いて求める。続いてステップS8で、ステップS7で求めた速度Vの絶対値が予め定めた最大速度Vmax以上か否かチェックする。最大速度Vmaxを越えている場合にはステップS9に進み、振動や光ディスクドライブの傾斜等による異常な加速が加わったものと判断し、この場合には速度Vを最大速度Vmaxに固定する。
一方、ステップS8で速度Vの絶対値が最大速度Vmaxより小さかった場合にはステップS10に進み、速度Vの絶対値を予め定めた最小速度Vminと比較する。この場合、最小速度Vminより小さかった場合には、ステップS3またはステップS6で取り込んだ際のタイミングで、振動等の要因により誤ったトラッキングエラー信号の取り込みを行なって誤った速度が算出されたものと判断し、ステップS11で速度Vを最小速度Vminに固定する。
このようにして速度Vが決められたならば、ステップS12で減速時間T3を求めた速度Vで割ってブレーキゲインGbを乗算することで減速電流Ib2を求め、レンズアクチュエータ60に対する速度Vに応じた減速電流Ib2の出力を指示する。続いてステップS3で所定の減速時間T3の経過をチェックしており、減速時間T3を経過すると、ステップS14でレンズアクチュエータに対する減速電流の出力をオフする。
ステップS15でオントラック制御のためにオフ状態にあったオントラックモードの制御をオンし、これによってビームを隣接トラックに引込んだ後、ステップS16でオントラック整定条件、例えばトラックセンタに対し予め定めたオフセット範囲に収まったことを認識したときオントラック完了をMPU14に上げることで、一連の1トラックシーク制御を終了する。
1トラックシーク制御が終了した後のオントラック制御状態にあっては、MPU14は上位装置の1トラックシークコマンドに続いて転送されたアクセスコマンドに従った媒体トラックに対するデータの記録または再生を行なう。
ここで、図8の1トラックシーク制御における加速期間210の加速時間T1、プリ減速期間212のプリ減速時間T2、及び減速期間214の減速時間T3の最適値として示したサンプル数は、トラッキングエラー信号E2を取り込んでいる図5に示したADコンバータ124のサンプリング周波数を68KHzとした場合である。サンプリング周波数68KHzの場合には、1サンプルの時間は約15μsとなり、13サンプルでは195μsの時間で済み、時刻t5〜t6の整定時間を含めても250μs〜300μsという短い時間で1トラックシークのオントラックを行うことができる。
更に本発明の1トラックシーク制御は、例えば目標シリンダまでのトラック数が所定値より小さい場合、例えば数トラックの場合には、図8の1トラックシーク制御を目標トラックまでのトラック数分繰り返すことでシークする。具体的には、時刻t1〜t6の処理を1トラックごとに繰り返すことになる。この1トラックシーク制御の繰り返しによる目標トラックまでのトラック数を越えるシークについては、図7のファインシークモードに従ったシーク制御を行なうことになる。
3.ファインシーク
図2において、本発明の光ディスクドライブはインタフェースコントローラ16を介して上位装置より1トラックシーク制御を超えるトラック数となる目標トラックへのアクセスコマンドの受領をMPU14で認識すると、DSP15に対し目標トラックアドレスを指定したファインシークを指示する。
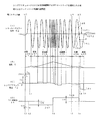
このMPU14によるファインシークコマンドを受けて、DSP15は図10のタイムチャートに示すようなファインシーク制御を行う。このファインシーク制御は図3に示したキャリッジ76に搭載された対物レンズ80を移動するレンズアクチュエータ60をメインとした制御であり、同時にキャリッジ76を駆動するVCM64をサブとした制御を行なう。
図10のファインシーク制御にあっては、シークスタートからシーク終了までのトラッキングエラー信号E2、ビーム速度V、レンズアクチュエータ60の電流I2、及びVCM64の電流I3を示している。レンズアクチュエータ60のシーク制御は、現在トラックから目標トラックに対する残りトラック数に基づいた目標速度となるように制御する速度制御を行なう。
この速度制御は図10(B)のように加速区間230、定速区間232、目標シリンダ直前の定速区間238に続く減速区間240となる。これに対しVCM64によるキャリッジの制御は、図10(D)のようにシーク開始時の目標トラックに対する減速トラックの位置偏差に応じて、加速電流と減速電流を発生してキャリッジを一定加速で加速し続いて減速するフィードフォワード制御を行なう。
具体的には、VCM電流I3としてシーク制御の前半で加速電流246を流し、シーク制御の後半で減速電流248を流す。このVCM64のフィードフォワード制御による一定加速制御により、図10(B)のビーム速度Vは、レンズアクチュエータの速度制御による定加速区間232の途中でVCMのフィードフォワード制御による定加速区間234が生する。
目標トラックまでの半分の位置をビームが過ぎると、VCM64のフィードフォワード制御の減速電流による定減速区間236となり、VCMの定減速区間236の減速電流がレンズアクチュエータ60の速度制御による定速制御の目標速度を下回ると、定速区間238となって現れる。
更にレンズアクチュエータ60による速度制御を詳細に見ると、まず時刻t1のシーク開始で規定の加速電流242をレンズアクチュエータ60に供給する。この加速電流は電流値Iaを持ち、予め定めた一定時間T1に亘って供給する。これによってレンズアクチュエータ60が予め定めた一定速度で加速される。時刻t3で加速を終了すると、それ以降は目標速度となるように一定速度を保つ定速度制御となる。
図10(A)のトラッキングエラー信号E2の目標トラックの1つ前のゼロクロス点250を過ぎると、その前後のサンプル点248,252で求めたトラッキングエラー信号E2の値TES1とTES2の差(TES1−TES2)に基づいた減速電流244を時刻t8〜t9に亘って流し、時刻t9の減速終了でオントラックサーボを有効としてビームを目標シリンダにオントラックさせる。
一方、図10(D)のVCM64の制御にあっては、時刻t1のシーク開始から最初のトラッキングエラー信号E2のゼロクロス点が得られる直前までのゼロクロスカウント開始時間Tcsを経過した時刻t2で、加速用のフィードフォワード電流−IffをVCM64に流し、目標シリンダ方向への加速制御を行なう。トラッキングエラー信号E2のゼロクロスのカウントによりビームが目標シリンダまでの半分のトラック位置に時刻t4で達すると、この時点で減速電流Iffに切り替えて一定加速の減速制御を行なう。そして目標トラック直前の0.5トラック位置のゼロクロス点250となる時刻t6のタイミングでVCM64の減速電流をオフして、フィードフォワード制御を終了させる。
ここで図10(A)のトラッキングエラー信号E2は、MOカートリッジをローディングした場合のファインシークにおけるトラッキングエラー信号であり、MOカートリッジ媒体についてはトラッキングエラー信号E2のゼロクロス点が隣接するトラック境界で得られることから、ゼロクロスのトラック位置は0.5,1.5,2.5,・・・というスケールを持つ。
図11は図10の目標トラック直前の定速区間238及び減速区間240について、トラッキングエラー信号E2とビーム速度Vを取り出して減速制御の詳細を表わしている。
本発明のファインシークにおける目標トラック直前の減速制御にあっては、目標トラックの直前のゼロクロス点となる0.5トラック手前のゼロクロス点250の前後のサンプル点248,252のそれぞれにおいてトラッキングエラー信号E2の値TES1,TES2を取り込み、両者の差(TES1−TES2)に基づいて、図11(B)のレンズアクチュエータ60に流す減速電流について、サンプル点252の時刻t7から減速を開始するまでの減速開始時間T1、減速時間T2及び減速電流Ibを決めている。
即ち、サンプル点248,252のトラッキングエラー信号E2の差(TES1−TES2)は、サンプル周期Tsのビーム移動量であることから、ビーム速度Vは、
V=(TES1−TES2)/Ts
となる。そこで本発明の減速制御にあっては、このビーム速度Vに基づいて固定的に定めた減速時間T2に流す減速電流Ibを決定する。即ち、減速電流Ibは
Ib=(T2/V)×ブレーキゲインGb
となる。このようなビーム速度Vに応じた減速電流Ibの決定による減速制御は、減速開始前のビーム速度がオントラック状態に引き込み可能な限界速度以内の場合に有効である。そこで減速開始時のビーム速度を判定するため本発明にあっては、図11(A)における目標トラックに対する2つ前のゼロクロス点254と1つ前のゼロクロス点250の間の時間T0、即ち目標トラックの手前1.5トラックから0.5トラックまでの時間T0を測定し、これによって減速開始速度V0 を
V0=(2×トラックピッチTP)/T0
として求める。このようにして求めた減速開始速度V0がオントラック引き込み可能な限界速度以内であれば、図11(B)の減速開始時間T1を
T1=T0/256
に決定する。ここで、分母の256は予め定めたデフォルト値であり、必要に応じて適宜の値が使用できる。そして、この減速開始時間T1を経過したタイミングで目標トラック直前のゼロクロス点250の前後のサンプル点248,252の差(TES1−TES2)から求めた速度V、減速時間T2及びブレーキゲインGbから減速電流Ibを決定し、固定的に定めた減速時間T2に亘って流す。
一方、1.5トラックから0.5トラックまでの時間T0に基づいて求めた減速開始速度V0がオントラック引き込み可能な限界速度を超えていた場合には、減速開始速度V0が高すぎることから、この場合には目標トラック直前のゼロクロス点250の前後のサンプル点248,252の差(TES1−TES2)に応じたビーム速度Vによる減速電流Ibの決定は行なわず、減速開始時間T1をT1=0とし、減速電流Ibは所定の減速最大電流値Imaxとし、減速時間T2を
T2=(2×トラックピッチTP)/T0
により決定する。このようにオーバ速度の場合は、減速時間T2に亘り最大減速電流Imaxを流すことで、安定して目標トラックに引き込み可能な零付近の速度に確実に減速できる。
図12,図13は図10のファインシーク制御のフローチャートであり、目標トラック直前の減速制御については図14,図15に別途取り出して詳細に示す。図12はファインシーク制御におけるレンズアクチュエータ60のメインとなる制御であり、まずステップS1で、シークスタートに伴いレンズアクチュエータ60に対し図10(C)のように加速電流Iaを出力する。続いてステップS2で図10(D)に示すように、予め定めたトラックゼロクロスカウントの開始時間Tcsの経過をチェックし、この経過を判別すると、ステップS3でアクチュエータ加速時間Taの経過をチェックする。
アクチュエータ加速時間Taを経過するまでは、ステップS4で最初のトラックゼロクロスの検出が行なわれるか否かチェックしており、トラックゼロクロスの検出が行なわれるとステップS5に進み、ファーストTZC検出フラグをセットする。ステップS3でアクチュエータ加速時間Taが経過すると、ステップS6で、ステップS5のファーストTZC検出フラグのセット済みか否かチェックする。セット済みであればステップS8に進む。セット済みでなければ即ち最初のトラッキングゼロクロスの検出が行なわれていなければステップS7でトラックゼロクロスの検出の有無をチェックする。トラックのゼロクロスの検出があればステップS8に進む。
このステップS4〜S7における最初のトラックゼロクロスの検出は、トラッキングエラー信号E2のゼロクロス点の時間経過からビーム速度を求める場合、シーク開始の最初のゼロクロス点では速度が検出できず、2回目になって初めて得られることから、最初のゼロクロス検出を速度演算の対象から飛ばすための処理である。
そしてステップS8でシーク開始から2回目のトラックゼロクロス検出が行なわれると、このとき初めて2つのゼロクロスの時間間隔からビーム速度が得られ、ステップS9以降のアクチュエータ速度制御が可能となる。したがってステップS8で2回目のトラックゼロクロス検出が行なわれたとき、ビームはシーク開始位置から1.5トラック目標シリンダ側に移動した位置にある。
ステップS9では前回のトラックゼロクロスと今回のトラックゼロクロスとの間の時間間隔を求め、予め定めたレンズアクチュエータのハードウェア故障に相当する所定時間φ2と比較する。もし異常時間φ2を超えていればステップS10でエラー処理を行うことになる。トラックゼロクロスの時間間隔が正常であればステップS11に進み、目標トラックに対する残りトラック数が1.5トラックに達したか否か判定する。
目標トラックの手前1.5トラックに達するまではステップS12以降の速度制御処理を行う。ステップS12にあっては、シーク方向がインナ方向か否かチェックする。インナ方向であればステップS13に進み、VCM64にインナシーク用のフィードフォワード電流の出力を行なわせる。アウタ側であれば、ステップS14でVCM64にアウタシーク用のフィードフォワード電流を出力させる。続いてステップS15で、現在トラックに対する目標トラックまでの残りトラック数から目標速度を計算し、図13のステップS16で目標速度が最大目標速度VTmaxか否か判定する。
最大目標速度VTmax以上であれば、ステップS13で目標速度を最大目標速度VTmaxとし、これに対応した一定加速度φ1となるようにVCM64に対する電流を決める。計算された目標速度が最大目標速度VTmax以下であれば、ステップS17の処理は行なわない。続いてステップS18で、目標速度から実速度即ちトラックピッチTPをトラックゼロクロス間隔で割った値を差し引き、これに所定の速度フィードバックゲインGvを掛け合わせてレンズアクチュエータ60に電流I2を出力する。
図12のステップS11で残りトラック数が1.5トラックになると、ステップS19の減速制御を行なう。ステップS19の減速制御は、図14,図15に詳細に示される。
図14の減速制御にあっては、目標トラックの手前1.5トラックに達したとき、ステップS2で速度制御の制御条件を変更してプリ減速を行なう。このプリ減速は速度制御のフィードバックゲインGvを下げると同時に、目標速度を零とする。このフィードバックゲインGvを下げるため、具体的には補正係数Kを掛け合わせる。
補正係数Kとしては、実験的にK=0.5が最適であった。このように目標速度を0としフィードバックゲインGvを半分に下げることで、そのときのビーム速度である(トラックピッチTP)/(TZC時間間隔)の値がマイナスの値を持ち、これに速度フィードバックゲインGvを半分にした値を掛けたプリ減速電流256が図11(B)のように目標トラックの手前1.5シリンダの位置からレンズアクチュエータ60に供給されることになる。このようなステップS20における目標シリンダの減速制御手前のプリ減速制御により、ビーム速度を最適な減速開始速度に制御できる。
続いてステップS21で、残りトラック数が0.5トラックに達したか否かチェックしている。残りトラック0.5トラックに達するまでは、ステップS22でトラッキングエラー信号E2のサンプリングTESが得られるごとにこれを速度比例値の算出に使用するTES1として取り込んでいる。ステップS21で残りトラック数が0.5トラックに達すると、ステップS23で1.5トラックから0.5トラックまでの減速開始速度V0 が限界速度Vthを超えている否かチェックする。
具体的には、限界速度Vthに対応した閾値時間Tth= 100μsを設定し、1.5トラックから0.5トラックまでのTZD時間間隔T0 が100μs以下であれば限界速度を超えているものと判断して、ステップS36以降の速度オーバーに対する処理に進む。TZC時間間隔T0が100μs以上であれば適正な減速開始速度にあるものと判断し、ステップS24で0.5トラック経過後の最初のサンプリングタイミングをステップS24で判別し、サンプリングタイミングに達すると、ステップS25でトラッキングエラー信号TESを取り込んでTES2とする。
そしてステップS26で、減速開始時間T1をTZC時間間隔T0とデフォルト値256を用いて算出し、ステップS27で減速開始時間T1の経過をチェックする。減速開始時間T1を経過したならば、ステップS28でビーム速度Vが予め定めた最大速度Vmax以上か否かチェックする。最大速度Vmaxを超えている場合には、ステップS31で最大減速電流Imaxを固定的に定めた減速時間T2に亘り出力する。
最大速度Vmax以下であれば、ステップS29で最小速度Vmin以下かチェックする。最小速度Vmin以下であれば、ステップS32で最小減速電流Iminを固定的に決めた減速時間T2に亘って出力する。(TES1−TES2)によるビーム速度Vが最大速度Vmaxと最小速度Vminの間の適正範囲にあれば、ステップS30でサンプル周期Ts、ビーム速度V、ブレーキゲインGbから減速電流Ibを決定して一定の減速時間T2に亘り流す。
ステップS30,S31またはS32で減速電流をレンズアクチュエータに出力したならば、図15のステップS33に進み、減速時間T2の経過をチェックし、減速時間T2が経過するとステップS34に進み、オントラック制御、即ち図6,図7のトラックオンモードに切り替え、目標トラックに対する引き込みを行ない、ステップS35でオントラック整定チェックが得られると、一連の処理を終了する。
一方、図14のステップS23で1.5トラックから0.5トラックまでのTZC時間間隔T0が限界速度Vthに対応した限界時間Tth=100μsより小さく、減速開始速度が限界速度Vthをオーバーしていることが判別されると、ステップS36に進み、減速開始時間T1をT1=0とし、減速時間T2を
T2=(2×トラックピッチTP/T0 )
として求める。この減速時間T2の算出は減速加速度をA、減速開始速度をVとすると、 T2=V/A
となることを意味している。続いてステップS37で、予め定めた減速最大電流Imaxを出力し、ステップS36で算出した減速時間T2の経過をチェックし、減速時間T2を経過すると図15のステップS34に進み、オントラック制御に切り替え、ステップS35でオントラック整定チェックを持って処理を終了する。
図16は本発明の光ディスクドライブに、図4に示したようにCD媒体82をローディングした場合のファインシーク制御の目標トラック直前の減速制御のタイムチャートであり、図11と同様、CD媒体から得られるトラッキングエラー信号E20とそのときレンズアクチュエータ60に流す電流I2を示している。CD媒体にあっては、トラックセンタでトラッキングエラー信号E20がゼロクロスすることになる。このためCD媒体の場合のトラッキングエラー信号のゼロクロス点は0,1,2,3,・・・のトラック数を表わすことになる。
したがってCD媒体における目標トラック直前の減速制御にあっては、図16(A)のように、目標トラックの手前2トラックから1トラックのゼロクロス点400,402のTZC時間間隔T0から減速開始速度V0 を求め、目標トラックに対する1トラック前のゼロクロス点402の前後のサンプル点404,406のトラッキングエラー信号E20の値をTES1,TES2として、その差(TES1−TES2)からビーム速度Vを求める。これ以外の点は図11のMOカートリッジ媒体の場合と同じである。
もちろん、CD媒体におけるトラックピッチTPはCD固有の1.6μsを使用する。またMOカートリッジ媒体にあっては、トラックピッチTPは540MB及び640MBについては1.1μsとなり、230MBについては1.4μsとなり、更に128MBについてはCD媒体と同様、1.6μSとなる。したがって、MOカートリッジまたはCDをローディングしたときの媒体種別の認識結果に対応して、媒体種別に対応したトラックピッチ及びMOカートリッジ媒体かCD媒体かに応じたトラック数のスケール設定を行なえばよい。
もちろん、減速制御で使用するトラッキングエラー信号の値TES1,TES2については、媒体ローディングの初期化処理で求めたトラッキングエラー信号を正規化するための補正値の掛け合わせによる感度補正を行なって使用することは勿論である。
4.偏心量の補正
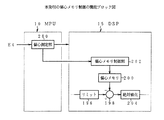
図17は図2の光ディスクドライブに設けられる光ディスク媒体をローディングした後の初期化処理において、媒体の偏心量を測定し、測定結果に基づいて偏心補正を行なう機能ブロックである。
図17において、偏心補正のため、まずMPU10側に偏心測定部260が設けられる。またDSP15側に偏心メモリ制御部262が設けられ、MPU10の偏心測定部260による偏心情報の測定結果に基づき、偏心メモリ200を使用してVCM64のサーボ系に対し偏心量を補正するためのオフセット補正を行なう。
具体的には、偏心メモリ200に基づいて作成された偏心オフセット量は、図5に示したVCM64のサーボ系におけるリミット196の出力段の加算器198に与えられ、加算器198に入力するVCM64に対する電流指示値に対し、偏心量を相殺するような偏心オフセットが加えられる。
まずMPU10に設けた偏心測定部260の測定処理を説明する。図18は、本発明の光ディスクドライブにローディングされるMOカートリッジ媒体70を取り出して示している。MOカートリッジ媒体70は、媒体中心にスピンドルモータ回転軸に装着するハブを備えており、ハブの回転中心264に対し媒体面に形成しているトラック中心266は、通常数十ミクロン程度の偏心を持っている。
このためMOカートリッジ媒体70がローディングされてスピンドルモータの回転中心264に装着されたとき、トラック中心266との間の偏心量に応じた1回転で1サイクルとなる偏心量がトラック上で発生する。
ここでMOカートリッジ媒体70は、そのディスク面の記録領域を半径方向に最インナのゾーン0から最アウタのゾーン9の10ゾーンに分割している。各ゾーンはID領域268とMO領域270の繰り返しであり、ゾーンに含まれるトラックについてはID領域268で分割されたセクタ数は同一となっている。ID領域は右側に取り出して示した3本のトラックの拡大図のように、ピットと呼ばれる情報の単位の溝又は穴の集合体であり、セクタマーク、トラック番号、セクタ番号、CRCなどが書き込まれている。
このためID部268の信号を再生することにより、ビームが位置するゾーン番号、トラック番号、セクタ番号などを検出することができる。ID部268に続いて設けられたMO部270は、データの記録再生を行う領域である。
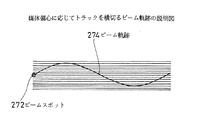
図19は、キャリッジ及びレンズアクチュエータを停止した状態で任意のトラック位置にビームスポット272を固定したときの媒体1回転に対するビーム軌跡274を表わしている。ここで説明を簡単にするため、実際には偏心する媒体面側を固定して相対的にビームスポット272の動きをビーム軌跡274として表わしている。
図18のように、MOカートリッジ媒体70にあっては、機械的な回転中心264とトラック中心264との間に数十ミクロン近い偏心があることから、ビームスポット272を固定して媒体を回転したときのビーム軌跡274は、オフセットの2倍の振幅により1回転で1サイクルとなる位置の変化を起こす。
このような光ディスク媒体における偏心量を測定するため、図7の偏心測定部260にあっては、VCM64及びレンズアクチュエータ60を停止した状態でフォーカスサーボのみをオンし、図20(A)のようにトラッキングエラー信号についてゼロクロス数を1回転について形成する。このとき図20(B)のように、光ディスク媒体上のインデックスを基準位置、即ち1回転の開始位置275として変化する回転検出信号E4を使用する。
即ち、時刻t1で回転検出信号E4が立ち上がって1回転の開始位置を認識した状態からトラッキングエラー信号E2のゼロクロスを計数し、時刻t6で再度回転検出信号E4が立ち上がるまでのゼロクロス数を計数する。このように1回転周期Trotに亘るゼロクロス数Nが計数できれば、トラックピッチをTPとした場合、偏心振幅Eampは
Eamp =(N/2)TP
として算出することができる。
一方、図19のように1回転で1サイクルの正弦波としてのプロフィールを持つ偏心量の1回転開始位置275に対する位相は、回転検出信号E1の1回転の開始位置275を基準としてトラッキングエラー信号E2のゼロクロス間隔の最大時間Tmaxを求め、その中点までの時間Tφを偏心位相とする。即ち、図10(A)にあっては、時刻t3からt5のゼロクロス時間間隔が最大時間Tmaxとなることから、その中間の時刻t4までの時間Tφを回転検出信号E4の回転開始位置275に対し正弦波のプロフィールを持つ偏心量が零となる原点位置までの位相量であると決定する。
図20のようにトラッキングエラー信号E2のゼロクロスに基づいて偏心振幅Eamp及び位相Tφが測定できたならば、この測定結果を図17のDSP15の偏心メモリ制御部262にセットし、媒体の回転に同期して各回転位置に対応した正弦値を偏心メモリ200から読み出して、これに偏心振幅Eampを掛け合わせることで偏心量を求め、この偏心量によるオフセット補正を行ないながら再度トラッキングエラー信号E2の1回転当たりのゼロクロス数を測定する。
図21は、図20の測定で得られた位相Tφが実際の偏心位相に一致していた場合の偏心補正時のトラッキングエラー信号E2を回転検出信号E4及びVCM64に流す偏心補正用のオフセット電流I3と共に表わしている。このように測定された偏心位相Tφが正しければ、VCM64に偏心補正の電流I3を流すことによってビームのトラックに対する偏心が補正される。
このとき1回転周期Trotに得られるトラッキングエラー信号E2のゼロクロス数は例えばこの場合には6回というように大幅に減少し、ゼロクロス数は偏心補正後の残留している偏心振幅であることから、適切な偏心測定結果に基づく補正が行なわれることが確認できる。
これに対し図20で測定した位相Tφが実際の位相に対し180度ずれていた場合には、測定結果に基づいた偏心補正を行なっても逆に偏心量を増やしてしまう結果となる。このような場合には図22(A)のように、回転検出信号E4の1回転周期Trotで得られるトラッキングエラー信号E2のゼロクロス数が極端に増加する。
このように測定値に対しゼロクロス数が増加した場合には、測定位相Tφが180度ずれていることから、測定された位相Tφに1回転時間Trotの半分の(Trot/2)を加えた位相(Tφ+Trot/2)に修正する。このように正しい位相に修正できれば、修正した位相による偏心補正で図21(A)のように1回転周期Trotのゼロクロス数を最初の測定時に比べ大幅に低減した最適な偏心補正状態とすることができる。
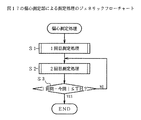
図23は図17のMPU10に設けた偏心測定部260による偏心測定処理のジェネリックフローチャートである。本発明の光ディスク装置にあっては、MOカートリッジまたはCDをローディングした初期化処理の際に、ステップS1に示す1回目の測定処理に続いて、ステップS2で2回目の測定処理を行なう。
ステップS1,ステップS2におけるそれぞれの測定処理の内容は、図20に示したように、トラッキングエラー信号のゼロクロスから偏心振幅Eampと位相Tφを測定し、続いて測定結果を用いて偏心補正を行ない、ゼロクロス数が増えれば逆位相に修正する処理であり、更に各測定処理ごとに偏心補正を行なった際の1回転当たりのゼロクロス数を保持しておく。
ステップS2で2回目の測定処理が終了したならば、ステップS3に進み、1回目と2回目、即ち前回と今回の測定処理における測定結果に基づいた偏心補正の1回転当たりのゼロクロス数の差の絶対値を求める。この差の絶対値が予め定めた閾値TH、例えば許容される偏心補正量の範囲内、具体的にはTH=10以下であれば測定結果は正しいものとし、例えば1回目と2回目のうち補正後のゼロクロス数が少ない方の測定結果を偏心補正に使用する。
これに対し前回と今回の差の絶対値が所定の閾値THを超えていた場合には、再びステップS2に戻り、再度測定処理を行なう。この場合には3回目の測定処理となる。そしてステップS3で前回と今回即ち2回目と3回目の差の絶対値が閾値TH以下かどうかチェックする。
この場合、もし1回目の測定処理で振動などにより異常な偏心測定が行なわれていた場合には、3回目の測定時における前回と今回の差の絶対値の比較で閾値TH以下に収まり、正しい測定結果を偏心補正に使用することができる。このため光ディスク媒体をローディングした後の初期化処理における偏心測定の段階で振動やノイズなどが加わって誤った測定処理が行なわれても、前回と今回の差の絶対値が所定の閾値に収まるまで測定処理を繰り返すことで、誤った偏心量の測定結果の使用を自動的に排除することができる。
図24は図23のステップS1またはステップS2のそれぞれで行なわれる偏心測定処理のフローチャートである。まずステップS1で、回転検出信号が立ち上がる1回転検出、即ち回転開始位置の有無を検出している。1回転検出が行なわれるとステップS2に進み、トラッキングエラー信号のゼロクロスを検出し、ゼロクロスが得られれば、ステップS3でカウンタCNTを1つカウントアップする。
続いてステップS4で、ゼロクロス時間間隔がそれまでの最大値MAXより大きいか否かチェックする。それまでの最大値MAXより大きければ、ステップS5で、新たに得られたTZC時間間隔を最大値MAXとする。そして、この最大値MAXとしたTZC時間間隔について、ステップS6で1回転検出からの時間を位相Tφに入れる。以上の処理をステップS7で次の1回転検出が行なわれるまで繰り返す。
ステップS7で1回転検出により1回転分のカウンタCNT及びその中でのTZC時間間隔の最大値から位相Tφが得られたならば、ステップS8で偏心振幅Eampを算出する。そしてステップS9で偏心位相Tφを求める。続いてステップS10で、測定された振幅Eampと位相Tφにより偏心補正動作を行なう。そしてステップS11で、偏心補正動作を行ないながら1回転の偏心量によるゼロクロスの数をカウンタCNTで測定する。
ステップS12では、測定前と測定後のカウンタCNTの値、即ちゼロクロスの値と比較し、補正後が減っていれば正しい測定結果として処理を終了する。もし補正後増えていれば、ステップS13で偏心位相Tφを180度ずらした*Tφに修正して偏心補正動作を行なう。
図25は図24のステップS10における測定振幅Eamp と位相Tφによる偏心補正動作のフローチャートである。この偏心補正制御は、所定のサンプリングクロックの割り込みごとに動作する。サンプリング割り込みがあると、ステップS1で回転検出からの時間txから測定された偏心位相Tφを差し引く。この算出値tがもし0より小さくマイナスの値であった場合には、ステップS3に進み、1回転時間Trotを加えて修正する。
この理由は、図26のタイムチャートに示すようになる。図26(A)はサンプリングクロックであり、図26(B)に回転検出信号E4を示している。回転検出信号E4の立ち上がりに続く次の時刻t1のサンプリングクロックのタイミングで図25の偏心補正制御が行なわれたとすると、このときステップS1で算出される時間tはt=t1−Tφとなり、マイナスの値をとる。
したがってステップS2からステップS3に進み、回転検出信号E4の1回転周期Trtを足して修正する。この結果、修正値は(t1+Trot)となる。一方、偏心メモリ200のアドレスは、回転検出信号E4の立ち上がりとなる回転開始位置に対し位相Tφの遅れを持った位置を0点としてsin2πftの値を格納している。このためステップS3で算出された(t=t1+Trot)は偏心メモリ200における点282の値となる。
この点282の値は、偏心メモリ200を位相Tφ側にも存在していると仮定すると、点282となる時刻t1に対応した回転位置の値と同じ正弦値である。したがって回転開始位置からの経過時間txが位相Tφを超えるまではステップS3の修正による偏心メモリ200のリードを行なう。
ステップS4にあっては、ステップS3またはステップS1で求められた時間tをアドレスとして偏心メモリ200よりsin2πfが読み出されることから、これに測定された偏心振幅Eampを掛け合わせることで、偏心量を補正する補正電流Ieを求め、VCM64に対する駆動電流に付加することで偏心補正ができる。
ここで図17の偏心メモリ200は、DSP15の動作タイミングを決めているサンプルクロックによる32サンプル毎の正弦データsinθを格納している。このため偏心メモリ200に格納する1回転分の正弦データの数は、MOカートリッジ媒体の回転数3600rpmの場合、36個であり、10度毎の正弦データをテーブルに格納している。偏心メモリ200に登録した正弦データの間のデータは、直線補間による近似計算により求めて出力する。
またCDをローディングした場合、光ディスクドイラブは媒体回転数をCD対応の2400rpmに変える。このように媒体回転数が変化すると、偏心メモリ200の読出し周期は32サンプルと一定であるため、偏心メモリ200に格納するデータ数が変わる。2400rpmの場合、1回転の偏心補正に必要な正弦値のデータ数は54個であり、約6.7度毎の正弦データを必要とする。そこで、ローディングされた媒体から回転数の変更を認識した場合は、変更した回転数に適合した正弦データを格納するわように偏心メモリ200を更新する。
5.エンベローブサーボ
図27は図2の光ディスクドライブのコントローラ10に設けたTES検出回路50の回路ブロック図である。このTES検出回路50は、光学ユニット側に設けられた2分割ディテクタ46の受光部46−1,46−2からの受光信号E5,E6を入力している。TES検出回路50は、ピークホールド回路290,292、減算器294及びエンベローブ検出切替回路295で構成される。ピークホールド回路290,292は図28のピークホールド回路290に代表して示す回路構成を持つ。
図28のピークホールド回路290は、入力端子に続いて抵抗R1とダイオードDを介してピークホールド用のコンデンサC1を接続している。コンデンサC1と並列には放電用の抵抗R2が接続され、更にアナログスイッチ296を介して放電用抵抗R3を接続している。アナログスイッチ296は、図27のエンベローブ検出切替回路295からの切替信号E9によりオン、オフ制御される。
エンベローブサーボのオン状態即ちエンベローブ検出を行なう場合には、アナログスイッチ296を図示のようにオフとしている。このときコンデンサC1の放電時定数は抵抗R2により決まり、このC1,R2の値で決まる放電時定数を540MBまたは640MB MOカートリッジ媒体のID部の戻り光によるトラッキングエラー信号の落ち込みを抑制するエンベローブ検出ができるような時定数に設定する。
エンベローブ検出をオフしたい場合には、アナログスイッチ296をオンする。アナログスイッチ296をオンするとコンデンサC1に、放電抵抗R2に加えて更に放電抵抗R3が並列接続される。したがって放電抵抗は抵抗R2とR3の並列抵抗値に低下し、これによってエンベローブ検出が略オフ状態となる。もちろん、完全にエンベローブ検出をオフしたい場合には、アナログスイッチ296によりコンデンサC1そのものを切り離すようにしてもよい。
図27のエンベローブ検出切替回路295にあっては、図2のDSP15からの切替制御信号によりピークホールド回路290,292のエンベローブ検出をオンオフ制御する。このエンベローブ検出のオンオフは次の3つとなる。
(a)ミラー部を有する128MB MOカートリッジ媒体のローディングの際に、エンベローブ検出をオフする。
(b)230MB MOカートリッジ媒体のローディング状態で、ユーザ領域を外れるミラー部を有する非ユーザ領域いわゆるプロセス領域を目標トラックとするアクセスコマンドを受領した場合に、エンベローブ検出をオフする。
(c)540MB及び640MB MOカートリッジ媒体のシーク制御において、予め定めた所定値を超える高速シークを検出した際にエンベローブ検出をオフする。この高速シーク時のエンベローブ検出のオフについては、230MB MOカートリッジのユーザ領域についても同様にして行なう。
高速シークを判定する所定速度としては、図28のコンデンサC1と抵抗R2で決まるエンベローブ検出をオンした際の放電時定数に従ったトラッキングエラー信号のピークレベルから0レベルに下がるまでの時間より短くなるトラックゼロクロス間隔の高速シークとすればよい。
図29はミラー部を有する媒体面の説明図であり、ID部268とMO部270についてはトラックごとにグループ298が形成され、ID部268についてはグループ298で挟まれた領域にエンボスでなるピット302を形成しているが、両者の間にはフラットな鏡面を持つミラー部300が存在する。
このような媒体トラックにおける、まずID部からのビーム戻り光によるトラッキングエラー信号への影響を見ると、図30のようになる。図30(A)は2分割ディテクタ46の受光信号E5、図30(B)は2分割ディテクタ46の受光信号E6であり、それぞれID部268のピット302の凹凸に応じた受光信号の振幅に落ち込みを起こす。
図30(C)は受光信号E5から受光信号E6を差し引いて得られるトラッキングエラー信号E2であり、受光信号におけるID部の落ち込みを加算した落ち込みが振幅成分に生ずる。このような振幅落ち込み308が例えばトラッキングエラー信号E2の低い振幅の部分に生ずると、トラックゼロクロスを起こし、トラックカウントを誤る。
そこで図27のピークホールド回路290,292によるエンベローブ検出をオンさせることで、図30(D)のようにID部からの戻り光により生ずる変動をエンベローブ検出により滑らかな変動振幅309に抑えることができる。
図31は図29のミラー部300からの戻り光による受光信号E5,E6及びトラッキングエラー信号E2であり、エンベローブ検出をオフした状態である。ミラー部300からの戻り光は、受光信号E5,E6のいずれについても同じレベルで同一極性の信号となることから、トラッキングエラー信号E2は両者の差から落ち込み部314のようにミラー部に対応した信号欠落を起こす。
図32は図31のミラー部を有する媒体のトラッキングエラー信号の検出について、更にエンベローブ検出をオンした場合の信号プロフィールである。エンベローブ検出をオンした場合には、受光信号E5,E6のID部に対応する落ち込み304,306は振幅落ち込み316,318のように抑制され、トラッキングエラー信号E2における振幅落ち込み308も振幅310のように抑制される。
しかしながら、ID部に続くミラー部からの反射成分310,312については、反射成分が立ち上がった後、エンベローブ検出がオンしているために、波形320,322のようにエンベローブ検出のための放電時定数に従って緩やかに振幅成分が低下し、その結果、トラッキングエラー信号E2に示すようにミラー部に続くトラッキングエラー信号の信号振幅324は大きく歪むことになる。
このようなエンベローブ検出をオンしたときの図32に示すトラッキングエラー信号E2のミラー部の戻り光による歪みを回避するためには、エンベローブ検出をオフし、図31のようなトラッキングエラー信号E2を使用することが望ましい。
図33は、図28のピークホールド回路290に矩形波パルス326が入力したときのエンベローブ検出オン時の立ち下がり波形330とオフ時の立ち下がり波形332を示している。エンベローブ検出がオンであれば、図33(B)の出力のようにピーク検出後の立ち下がり波形330は緩やかな時定数で立ち下がるため、ID部の落ち込みなどを抑制したエンベローブ検出による滑らかなトラッキングエラー信号が作成できる。一方、ミラー部を有する媒体については、エンベローブ検出をオフすることで図33(C)のように急速な波形の立ち下がり332とし、これによってミラー部の戻り光による受光成分が緩やかに立ち下がることでトラッキングエラー信号を大きく歪ませることを阻止できる。
図34は高速シーク時のトラッキングエラー信号をエンベローブ検出のオン、オフについて示している。図34(A)はエンベローブ検出をオフした場合の高速シーク時のトラッキングエラー信号であり、トラッキングエラー信号の上下のピーク振幅とその間のゼロクロスが正確に再現されている。これに対しエンベローブ検出をオンすると、図33(B)のような緩やかな立ち下がり波形330となるため、ゼロクロス間隔が短くなり、高速シーク時には図34(B)のように上下のピークの振幅成分のみが検出され、もはやトラッキングエラー信号としての機能が完全に喪失されてしまう。
本発明にあっては、高速シーク時にあっては図34(B)のようなトラッキングエラー信号の喪失を避けるため、エンベローブ検出をオフし、図34(A)のように高速シークであっても正確にトラッキングエラー信号を作成できるようにしている。
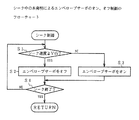
図35は図27のエンベローブサーブ制御処理のフローチャートである。まずステップS1で媒体ローディングがあると、ローディングした媒体の種別を認識する。ローディングした媒体がステップS2で128MB MOカートリッジ媒体であることが認識されると、ステップS3に進み、エンベローブサーボをオフする。
ローディングした媒体がステップS4で230MBのMOカートリッジ媒体であることが認識されると、ステップS5で非ユーザ領域のアクセスか否かをチェックしており、非ユーザ領域を目標トラックとするアクセスを上位装置から受領した場合にはステップS6に進み、エンベローブサーボをオフする。非ユーザ領域のアクセスでなければ、ステップS7でエンベローブサーボをオンすることになる。
図36はエンベローブサーボのオン状態で行なわれるシーク制御時のエンベローブサーボのオンオフ制御である。シーク制御時にあっては、ステップS1で、トラッキングエラー信号のゼロクロス時間間隔から得られるシーク速度が予め定められた閾値速度Vth以上か否かチェックしている。シーク速度が閾値速度Vth以上であれば高速シークと判断し、ステップS2でエンベローブサーボをオフする。
シーク速度が閾値Vth未満であれば、ステップS3でエンベローブサーボのオンを維持する。以上の処理をシーク終了をステップS4で判別するまで繰り返す。もちろん、シーク中にシーク速度がVth以下になれば、その時点でステップS3でエンベローブサーボをオンすることになる。
6.フォーカスサーボ
図37は図5のDSP15により実現されるフォーカスアクチュエータ56に対するフォーカスサーボに設けているPID演算部96の機能ブロックである。PID演算部96は微分器340とゲイン乗算器342を備えた微分演算部、積分器344とゲイン乗算器346を備えた積分演算部、更にゲイン乗算器348を用いた比例演算部を備える。
微分器340、積分器344及びゲイン乗算器348のそれぞれには、図2のFES検出回路48で媒体の戻り光の受光出力に基づいて作成されたフォーカスエラー信号E1が入力する。ゲイン乗算器342,346及び348の出力は加算器350で掛け合わされ、PID演算によるフォーカスサーボ信号として、サーボスイッチ98を介して最終的にはDAコンバータ108によりフォーカスアクチュエータ56に電流を供給し、フォーカスエラー信号E1を0とするように応答フォーカスを行なう。
このようなフォーカスサーボのPID演算部96に対し、本発明にあっては、新たにゲイン制御部352を設けている。ゲイン制御部352に対しては、図2に示したフォーマッタ18からIDゲート信号E11が入力されている。ゲイン制御部352はフォーマッタ18からのIDゲート信号E11がイネーブルになると、微分器340に続いて設けているゲイン乗算器342のゲインを0に切り替える。この結果、ゲート信号E11がイネーブルとなっている間、ゲイン乗算器342から出力される微分成分は0となり、PID演算部96はPID演算部として動作することになる。
図38は、ゲイン制御部352でIDゲート信号E11に同期して微分器340のゲイン乗算器342のゲインを0としない場合の動作である。図38(A)のトラックのID部に対応して、図38(B)のようにフォーカスエラー信号E1が変動する。このとき図37のPID演算部96のPID演算機能が有効となっていると、フォーカスエラー信号E1のID部前後の立ち下がり及び立ち上がりに同期して、主に微分成分に依存したフォーカスアクチュエータ56に対する電流I1がパルス状に供給される。
即ち、MO部からID部に移行する際にID部に対物レンズを合焦させるオートフォーカスが掛かり、ID部からMO部に抜ける時には逆にMO部に対物レンズを合焦させるオートフォーカスが掛かり、これをトラック上のID部ごとに繰り返す。この結果、図38(D)のように対物レンズのレンズ位置がMO部とID分に応じた合焦位置に交互に制御されることになる。しかしながら、ID部については物理的なピットによる記録状態であることから、MO部のような光磁気的な記録のための精密なオートフォーカス制御は不要であり、ID部に合焦させなくてもID部の戻り光から十分なS/NをもってID信号を再生することができる。
そこで本発明にあっては、図39(D)のように、トラックID部に同期してフォーマッタより得られるIDゲート信号E11に同期して、ID部のタイミングで図39(D)のように微分器340のゲインを乗算するゲイン乗算器342の微分ゲインGdを0に切り替える。ID部でPID演算部96はPI演算部として動作することとなり、図39(B)のようなID部に対応してフォーカスエラー信号E1にステップ状の変化が起きても、この変化はPID演算部96の出力に現れない。
その結果、図39(E)のようにフォーカスアクチュエータ56に対する電流I1はID部で変化することなく、安定した必要最小限の電流とすることができる。もちろん、図38(F)の対物レンズのレンズ位置についても、ID部ごとに位置は変化せず、MO部に対する合焦状態を安定して維持することができる。ここで図37の実施形態にあっては、IDゲート信号E11に同期してゲイン制御部352が微分器340のゲイン乗算器342のゲインを0に切り替えるようにしているが、更にゲイン演算部を構成するゲイン乗算器348のゲインをIDゲート信号E11に同期して0にするようにしてもよい。
このため、ID部のタイミングでPID演算部96は積分演算のみを行なうこととなり、ID部で変化するフォーカスエラー信号E1によるフォーカスサーボの不要な動作を更に確実に抑え込むことができる。もちろん、ディスク媒体の撓みによる上下方向の緩やかな変動については、積分比例制御もしくは積分制御により十分に長い時定数で追従して安定したオートフォーカス状態を維持することができる。
尚、上記実施形態にあっては、MOカートリッジ媒体とCD媒体の両方をローディングして使用可能な光ディスクドライブを例にとっており、このようにMOカートリッジ媒体及びCD媒体を使用可能な光ディスクドライブにあっては、トラッキングエラー信号の検出に対する光学系の共通化が要求される。通常、MOカートリッジ媒体についてはプッシュプル法が採用され、一方、CD媒体については通常3ビーム法が使用されている。しかし、3ビーム法としたのではMOカートリッジ媒体とCD媒体の光学系の共通化が図れないことから、本発明にあってはCD媒体についてもワンビームとするが、レーザダイオードの波長680nmではCDのピット深さの関係でプッシュプル法は採用できない。
そこで本発明はCD媒体のトラッキングエラー検出についてはヘテロダイン法を採用する。これによって、MOカートリッジ媒体であってもCD媒体であっても同じ光学ユニットによりトラッキングエラー信号を検出してポジショナの制御ができる。
また本発明は、MOカートリッジ媒体とCD媒体の両方を使用可能な光ディスクドライブに限定されず、MOカートリッジ媒体につき例えば128MB、230MB、540MBまたは640MBの全ての使用可能な光ディスクドライブとして実現してもよい。