JP3771988B2 - 計測内視鏡装置 - Google Patents
計測内視鏡装置 Download PDFInfo
- Publication number
- JP3771988B2 JP3771988B2 JP05811497A JP5811497A JP3771988B2 JP 3771988 B2 JP3771988 B2 JP 3771988B2 JP 05811497 A JP05811497 A JP 05811497A JP 5811497 A JP5811497 A JP 5811497A JP 3771988 B2 JP3771988 B2 JP 3771988B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- image
- optical
- endoscope
- images
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000005259 measurement Methods 0.000 claims description 198
- 230000003287 optical effect Effects 0.000 claims description 194
- 238000000034 method Methods 0.000 claims description 82
- 230000008569 process Effects 0.000 claims description 68
- 238000012545 processing Methods 0.000 claims description 57
- 238000003384 imaging method Methods 0.000 claims description 45
- 238000012937 correction Methods 0.000 claims description 42
- 238000006243 chemical reaction Methods 0.000 claims description 24
- 230000015572 biosynthetic process Effects 0.000 claims description 5
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 28
- 239000004973 liquid crystal related substance Substances 0.000 description 14
- 238000007689 inspection Methods 0.000 description 13
- 238000004519 manufacturing process Methods 0.000 description 13
- 238000004458 analytical method Methods 0.000 description 12
- 238000004364 calculation method Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 6
- 230000014509 gene expression Effects 0.000 description 6
- 230000000007 visual effect Effects 0.000 description 6
- 238000007373 indentation Methods 0.000 description 5
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 238000000691 measurement method Methods 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 238000003702 image correction Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 230000009191 jumping Effects 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 238000005260 corrosion Methods 0.000 description 2
- 230000007797 corrosion Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 239000006059 cover glass Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00193—Optical arrangements adapted for stereoscopic vision
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00194—Optical arrangements adapted for three-dimensional imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/24—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the mouth, i.e. stomatoscopes, e.g. with tongue depressors; Instruments for opening or keeping open the mouth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1076—Measuring physical dimensions, e.g. size of the entire body or parts thereof for measuring dimensions inside body cavities, e.g. using catheters
Description
【発明が属する技術分野】
本発明は、一対のステレオ画像を得るための光学系による被計測物2つの像を内視鏡本体に設けられた撮像素子上の異なる位置に結像させ、その内視鏡の画像を用いて画像処理により計測を行う計測内視鏡装置に関する。
【0002】
【従来の技術】
従来、立体内視鏡装置に関して提案された特開昭64−26813号公報に開示されたものには、1つのCCDを用いた立体視内視鏡の技術が示されている。また、特開昭62−80768号公報に開示のものは、左右の視差を利用したステレオ画像に対して幾何学的歪み補正を行うもので、低解像の粗なマッチングからステレオ画像の相対歪みを予測して高解像なマッチングへと拡張していくことを可能とする。
【0003】
【発明が解決しようとする課題】
しかし、前述の特開昭64−26813号公報に開示のものには、1つのCCDを用いた立体視内視鏡の技術が示されているが、対象を計測するための手段に関しては記載はない。
また、前述の特開昭62−80768号公報に開示のものは、ステレオ画像の幾何学的歪みの補正および低解像の粗なマッチングからステレオ画像の相対歪みを予測して高解像なマッチングへと拡張していく手法が示されているが、光学アダプタを取り替えた場合のレンズ特性のばらつきを考慮した計測方法は示されていない。
【0004】
通常、光学アダプタは、1つ1つ個体の光学特性が異なる。また、ビデオ内視鏡本体のCCDの位置にもばらつきがある。このばらつきは、計測を行う上で大きな誤差を招く原因になる。したがって、この誤差を取り除くために計測用の光学アダプタとビデオ内視鏡を一対一で対応させて光学データ取りを行って、画像を補正する必要があった。
【0005】
しかし、計測用光学アダプタとビデオ内視鏡本体を一対一で対応づけして販売することは計測を行う必要のないユーザにとっては不要の処理が加えられており、高価な内視鏡となったしまう。しかし、一対一での対応づけを行わなかった場合、計測用光学アダプタを追加購入して任意のビデオ内視鏡本体と組み合わせて使用することもできない。
【0006】
一方、製造者側の立場からは、一対一で対応づけをする場合、光学アダプタとビデオ内視鏡本体を組み合わせてデータ取りを行う必要があり、生産工程が複雑となり、コストアップとなる。結局、ユーザにとって高価な計測内視鏡装置となる。
【0007】
本発明は、上述の不具合を解決するためになされたものであって、一対のステレオ画像を得るための光学系による内視鏡画像を用いた画像処理により計測を行う計測内視鏡装置において、安価でしかも計測精度の優れた計測内視鏡装置を提供することを目的とする。
【0008】
【課題を解決するための手段】
本発明の計測内視鏡装置は、内視鏡先端部に着脱自在に設けられた一対の対物レンズを有する光学アダプタと前記一対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡を有しており、少なくとも、前記内視鏡の画像を用いて画像処理により計測を行う計測内視鏡装置において、前記光学アダプタの光学データを記録した記録媒体から情報を読み込む処理と、前記内視鏡本体の撮像系の位置誤差を基に前記光学データを補正する処理と、前記補正した光学データをもとに計測する画像を座標変換する処理と、座標変換された2つの画像を基に、2画像のマッチングにより任意の点の3次元座標を求める処理と、を行う計測処理手段を有する。
【0009】
上記計測内視鏡装置においては、一対の対物レンズにより上記撮像素子により取り込まれた被写体の2つの画像を座標変換して求めた2つの画像情報を基に、2画像のマッチングにより被写体上の任意の点の3次元座標を求める。
【0010】
【発明の実施の形態】
以下、図を用いて本発明の実施の形態について説明する。
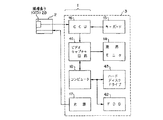
図1は、本発明の第1の実施の形態を示す計測内視鏡装置である計測内視鏡システムの全システム構成図である。図2は、上記計測内視鏡システムのブロック構成図である。本計測内視鏡システム1は、図1,2に示すように撮像素子を内蔵するビデオ内視鏡(以下、内視鏡と記載する)2と、計測処理手段である計測装置3により構成される。
【0011】
上記内視鏡2は、主に、2つのレンズ系を持つ光学アダプタ4が装着され、撮像素子を内蔵する挿入部7と、挿入部7を屈曲操作するための操作部9と、ユニバーサルケーブル11と、光源コネクタ12と、カメラコントロールコネクタ13より構成される。
【0012】
計測装置3は、主に、内視鏡2からの撮像信号をNTSC信号等のビデオ信号に変換するカメラコントロールユニット(以下、CCUと記載する)16と、上記ビデオ信号をデジタル静止画信号に変換するビデオキャプチャ回路41と、ビデオキャプチャ回路41のデジタル画像信号に基づいて画像処理を行うコンピュータ18と、処理メニュー,処理画像等を表示する液晶モニタ14と、制御処理情報または画像情報等を記憶媒体にて記憶、または、再生するハードディスクドライブ(以下、HDDと記載する)43、および、フロッピディスクドライブ(以下、FDDと記載する)42と、入力操作用のキーボード15と、光源部17により構成されている。
【0013】
本実施の形態の計測内視鏡システム1の各構成部材の詳細や動作の詳細な説明に先立って、本システム1の概要から説明する。
本システム1に適用される光学アダプタ4は、生産工程にて個体の異なる光学アダプタ毎に主となる生産測定治具39の撮像素子内蔵のマスタ撮像ユニット34(図5参照)に取り付けて、次の(a)〜(d)に示す各光学アダプタ4の特有の光学データが測定される。その光学データを記録媒体であるフロッピディスク(以下、FDと記載する)33(図5参照)に記録する。この特有の光学データが記録されたFD33と、光学アダプタ4とは、一対一で対応することになって、出荷後、1つの組み合わせのものとして扱われる。
【0014】
上述の特有の光学データは、
(a)2つの光学系の幾何学的歪み補正テーブル
(b)2つのレンズ系の焦点距離
(c)2つのレンズの光軸間の距離
(d)2つの画像のマスタに対する位置情報
である。
【0015】
上記特有の光学データ採りを行った後の光学アダプタ4は、内視鏡2に取り付け、計測装置3において、次に示す(1)〜(8)の処理を行って各種寸法計測を行うことができる。すなわち、
(1)上記FD33から上記(a)〜(d)の光学データを読み込む。
(2)本システム1を用いて白い被写体を撮像する。
(3)上記(d)のデータおよび上記(2)の撮像データを用いて本光学アダプタ4と内視鏡2との組み合わせによる画像位置のずれを求める。
(4)上記(3)のデータおよび上記(1)のデータを用いて、本内視鏡2に対する幾何学的歪み補正を行う変換テーブルを作成する。
(5)本内視鏡2にて被写体である被計測物を撮像し、画像を取り込む。
(6)上記の取り込んだ画像を上記(3)で作成したテーブルをもとに座標変換する。
(7)座標変換された画像を基に、上記(2)の撮像データのマッチングにより任意の点の3次元座標を求める。
(8)上記3次元座標を基に各種寸法計測を行う。
【0016】
本内視鏡システム1では、上述の処理を行って被計測物の精度の優れた計測を行うことができる。以下、そのシステムの構成、および、作用等について詳細に説明する。
図3は、上記内視鏡2の挿入部7の先端部分の拡大斜視図であり、図4は、図3のA−A断面図である。
【0017】
内視鏡2の挿入部7は、主に、内視鏡先端部5に着脱自在に装着される光学アダプタ4と、上記先端部5に配設されるカバ−グラス27および撮像素子28と、操作部9の湾曲ノブ10によって内視鏡先端部5の方向を変えることができる湾曲部6、湾曲部6と操作部9を連結する屈曲自在な軟性部8により構成される。
【0018】
光学アダプタ4は、光学アダプタ本体25と、その本体25の端面に設けられる2つの照明窓23と、2つの対物レンズR21、対物レンズL22と、固定ネジ20で構成されている。上記固定ネジ20によって内視鏡先端部本体26に着脱可能な状態で装着される。上記対物レンズR21、対物レンズL22の像は、上記内視鏡先端部5の1つの撮像素子28上の異なる位置に結像する。
【0019】
内視鏡2の操作部9に接続されるユニバーサルケーブル11内には図示しないライトガイドファイババンドルと、内視鏡先端の撮像素子28からの信号線29が配設されている。上記ライトガイドファイババンドルは、光源コネクタ12に接続される。上記撮像素子28からの信号線29は、CCUコネクタ13に接続される。
【0020】
上記計測装置3は、前述の前記光学アダプタ特有の光学データが記録されたFD33をFDD42に挿入して、その光学データを取り込むことができる。内視鏡2にて対物レンズR21、対物レンズL22を介して取り込まれる像の撮像信号が、上記計測装置3のCCU16にてビデオ信号に変換され、液晶モニタ14上に被計測物像として表示されるとともに、コンピュータ18のメモリ上にも記録される。そして、コンピュータ18において、上記取り込まれた光学アダプタ特有の光学データに基づいた被計測物の計測処理が行われる。
【0021】
図5は、前述した光学アダプタ4に特有の光学データを測定するための生産測定治具39による測定状態を示す斜視図である。
上記生産測定治具39は、光学アダプタ4が装着可能であって、内視鏡先端部と同様の構造を有するマスタ撮像ユニット34と、上記ユニット34からの信号線が接続されるCCU35と、FD33が着脱可能なFDD37を有し、上記CCU35からの画像データの画像処理を行うパーソナルコンピュータ36、および、光学アダプタの光学特性を解析するためのチャート38で構成されている。
【0022】
上記生産測定治具39による光学データの取り込みを行う場合、まず、図5に示すように、光学アダプタ4をマスタ撮像ユニット34に取り付け、チャート38の像を光学アダプタ4を介して取り込み、その画像データに基づいてパーソナルコンピュータ36にて、画像処理を行い、前記(a)〜(d)の光学データを求め、FD33に記録する。
【0023】
次に、上記光学アダプタ4に特有の各光学データを具体的に説明する。
(a)幾何学的歪み補正テーブルについて、
一般にレンズ系による画像には光学的な歪みがある。計測を行う場合にはこの歪みが大きな誤差原因となるため、座標変換を行うことによりこの歪みを取り除くことができる。座標変換は、光軸中心を中心にして行ってもよいし、より正確に補正する場合は、光学系の幾何学的歪みの中心を用いるとよい。また、2つの画像の幾何学的歪み補正テーブルは、右画像、左画像別々に設けてもよいし、2つをまとめて1つのテーブルにしてもよい。以下、1つのテーブルにした場合について、図6,7をもとに補正テーブルを説明する。
【0024】
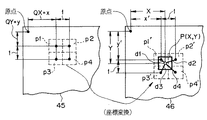
図6,7において、撮像画面45上の点p1〜p4は、座標変換前のピクセルを示す。p1〜p4をf(x,y)により座標変換すると、p1′〜p4′とする。このときのp1′〜p4′を与える座標は必ずしも整数ではなく実数値の座標として求められる。変換後の液晶モニタ上の変換後画面46に表示するには変換後画素P(X,Y)の座標(X,Y)をピクセル単位の整数値へ変換しなければならない。
【0025】
上記座標の整数値化のための補正は、ウエイトテーブルW1〜W4によって行われる。すなわち、変換画面1ピクセルにつき、そのピクセルが撮像画面上の光学上の幾何学的歪み上対応する座標の4つのピクセルの撮像データを上記ウエイトテーブルW1〜W4の比率を乗じ、変換画面ピクセルの画素データP(X,Y)を求めることになる。
【0026】
そこで、座標変換のf(x,y)は、変換座標x′,y′として、次の式を用いる。すなわち、

【0027】
上記f(x,y)を用いて、p1〜p4のx,y座標を代入し、p1′(x′,y′)〜p4′(x′,y′)を与える座標(x′,y′)を得る。このx′,y′の値は、前述したように必ずしも整数ではなく、上記ウエイトテーブルW1〜W4で補正して、整数の変換後座標(X,Y)に対する画素データを求めることになる。
【0028】
そこで、変換後画素データP(X,Y)を与える変換画面上の4つの点p1′〜p4′の座標を(x′,y′)とし、その変換画面上の4つの点p1′〜p4′に対応する撮像画面(原画)上の4つの点の座標(x,y)〜(x+1,y+1)のうちの左上点p1の座標(x,y)のx座標をQX(X,Y)とし、また、y座標をQY(X,Y)として、幾何学的歪み補正テーブルの座標参照テーブルとして、まず、FD33に記録する。
【0029】
変換後のピクセル単位の整数値で与えられる座標(X,Y)の変換後画素データP(X,Y)は、p1′〜p4′とW1〜W4により求められる。但し、図7に示すようにdnをp1′〜p4′からP(X,Y)までの距離を示すとして、
S=d1+d2+d3+d4 …(3)
さらに、
W1=d1/S
W2=d2/S
W3=d3/S
W4=d4/S …(4)
とする。そして、P(X,Y)の値は、
P(X,Y)=W1×p1′+W2×p2′+W3×p3′+W4×p4′…(5)
によって求められる。
【0030】
上記W1,W2,W3,W4は、各変換画面上の各ピクセル点(X,Y)についてウエイトテーブルとして、上記座標参照テーブルQX(X,Y),QY(X,Y)とともに上記FD33に記録される。
次に、(b)〜(d)に関して、
(b)2つのレンズ系の焦点距離として、右画像の焦点距離fR、および、左画像の焦点距離fLを測定して記録する。
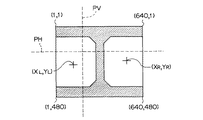
(c)2つのレンズ系の光軸座標として、右画像の光軸座標XR,YRと左画像の光軸座標XL,YLを測定して記録する。
(d)マスタに対する位置情報(視野形状パターン)あって、基準ラインV(垂直ライン)の輝度データとして、
PV(100,Yn) 但し、Yn=1,2,3,…480
および、基準ラインH(水平ライン)の輝度データとして、
PH(Xn,100) 但し、Xn=1,2,3,…640
を測定して記録する。
【0031】
以上のように構成された本実施の形態の計測内視鏡システム1による計測動作としてのステレオ計測処理について、図8,9,11,12のフローチャート、および、図10〜図13等を用いて説明する。
【0032】
本ステレオ計測処理は、光学アダプタ4の2つの対物レンズR21、対物レンズL22により取り込まれる視差のある右左の画像データに基づいて、3次元座標の計測を行う処理である。まず、ステップS100において、初期化を行うか否かをチェックする。すなわち、本計測ソフト立ち上げて最初の状態の場合と、光学アダプタ4を交換したか、内視鏡を交換した場合には、ステップS101〜105のルーチンに進み、初期化を実行する。それ以外の場合は、ステップS110に進み、すでに設定されている補正画像情報データをオリジナルデータとして読み込み、ステップS106に進む。
【0033】
上記ステップS101においては、補正画像データの読み込みが行われる。すなわち、光学アダプタ4と一対一で対応した前記(a)〜(d)の特有の光学データをFD33から読み込み、これをマスタデータとする。
【0034】
続いて、ステップS102では、白い被写体のイメージを取り込む。すなわち、光学アダプタ4を取り付けた計測内視鏡システム1により白い被写体を写し出し、その画像をビデオキャプチャ回路41を介してコンピュータ18のメモリ上に取り込む。
【0035】
続いて、ステップS103では、後述するサブルーチン画像位置設定処理(図9(A)参照)を実行する。このサブルーチンの処理は、光学アダプタ4の生産時に光学データを取得したマスタ撮像ユニット34と内視鏡2との特性の違いにより生じる画像の座標のずれ量を求める処理である。
【0036】
ステップS104では、テーブルの設定を行う。この処理では、ステップS101で取り込んだ前記光学データのうち(a)の2種類の画像の幾何学的歪み補正テーブルをステップS103で求めた座標のずれ量に応じて補正した補正テーブルが作成される。すなわち、以下の2つで構成されるオリジナルデータが作成される。
【0037】
ウエイトテーブルとして
W1′(X,Y)=W1(X+ΔX,Y+ΔY)
W2′(X,Y)=W2(X+ΔX,Y+ΔY)
W3′(X,Y)=W3(X+ΔX,Y+ΔY)
W4′(X,Y)=W4(X+ΔX,Y+ΔY)…(6)
また、座標参照テーブルとして、
QX′(X,Y)=QX(X,Y)+ΔX
QY′(X,Y)=QY(X,Y)+ΔY …(7)
但し、「′付き」は、補正後を示し、「′なし」は、補正前を示す。また、ΔX,ΔYは、マスタで測定した画像と光学アダプタ4を本システムに装着したときの画像のずれ量を示す。
【0038】
ステップS105では、補正画像情報データの保存を行う。すなわち、ステップS104で求めたオリジナルデータをハードディスクに保存する。
そこで、ステップS106において、イメージデータを取り込む。すなわち、計測すべき物体を撮像し、メモリ上に原画像データとして取り込む。そして、ステップS107で後述するサブルーチンの画像補正処理(図9(B)参照)を実行し、原画像の画像補正を行う。すなわち、ステップS106で取り込んだ原画像データをステップS104で作成したオリジナルテーブルの基づいて座標変換し、計測を行うための計測画像データを得る。
【0039】
続いて、ステップS108にて上記計測画像データに基づき、後述するサブルーチンの計測処理(図13参照)を実行し、3次元座標の演算等を行って選択された計測を行い、本ステレオ計測処理を終了する。
【0040】
ここで、上記ステップS103においてコールされるサブルーチンの画像位置設定処理について、図9(A)のフローチャートを用いて説明する。
まず、ステップS152において、視野形状パターンを呼び出す。すなわち、上記ステップS101で取り込んだ特有の光学データのうち(d)のマスタに対する視野形状パターンを与える位置情報を示す輝度データとして、
PV(100,Yn),但し、Yn=1,2,3,…480
PH(Xn,100),但し、Xn=1,2,3,…640
を呼び出す。図10は、光学アダプタ4をマスタ撮像ユニット34に装着した状態で白色チャートの画像を示す図であり、垂直ラインPV,水平ラインPHがそれぞれ上記輝度データを与えるラインである。
【0041】
ステップS153にてパターンマッチングおよび視野位置設定、光軸位置設定を行う。図11は、光学アダプタ4を装着した計測内視鏡システム1により白色チャートの画像を取り込ん画像を示す図である。視野形状パターンを与える位置情報を示す輝度データとして、
PV′(100,Yn),但し、Yn=1,2,3,…480
PH′(Xn,100),但し、Xn=1,2,3,…640
で与えられる。
【0042】
また、図12は、上記マスタ、および、計測内視鏡システム1に対する視野形状パターンを与える輝度とを縦軸とし、横軸を画像のアドレスとした輝度の変化を示す図であって、図12(A)がラインPV、および、ラインPV′の輝度変化を示し、図12(B)がラインPH、および、ラインPH′の輝度変化を示している。
【0043】
上記ステップS153のパターンマッチング処理では、図12(A)、および、(B)の輝度変化に基づき、正規化相互相関を用いてマスタに対する画像の位置ずれΔX、ΔYを求める。さらに、計測系光軸位置は、右左光学系に関して水平,垂直座標xR,yRとxL,yLは、次の式で求められる。すなわち、
xR=XR+ΔX
yR=YR+ΔY
xL=XL+ΔX
yL=YL+ΔY …(8)
となる。
【0044】
また、上記ステップS107(図8参照)において、コールされるサブルーチンの画像補正処理について、図9(B)のフローチャートを用いて説明する。
本サブルーチンの処理により計測画像上の画素データP(X,Y)を得ることができる。まず、ステップS162において、前記ステップS104(図8参照)にて作成した補正テーブルであるオリジナルデータを取り込む。ステップS163では、補正した画像の座標、すなわち、計測画像の座標をX,Yと設定する。
【0045】
ステップS164において、補正座標X,Yを得るために必要な原画像の座標を参照座標とし、前記ステップ104で作成したQX′(X,Y)、QY′(X,Y)により補正座標X,Yを得る。そして、ステップS165にて、前記ステップ104で作成したウエイトテーブルを取り込み、ステップS166で補正後の座標上の画素データP(X,Y)を次式より求める。すなわち、
【0046】
続いて、ステップS167において、補正画像範囲を設定し、本ルーチンを終了する。なお、このサブルーチンの画像補正処理は、左右2画像に対して行い、原画像を計測画像に変換する。
【0047】
次に、図8のステップS108にてコールされるサブルーチンの計測処理について、図13のフローチャートにより説明する。
まず、ステップS171において、モニタ14に表示されるメニュー上にて3つの計測方式を選択する。その1つは、深さ計測であり、点と平面間の距離を計測する場合、例えば、図15の斜視図に示すようにパイプ51等の内面の腐食の深さh(図16部分拡大図参照)を計る場合に用いられる。この計測方式を選択するとステップS172にジャンプする。他の1つは、長さ計測であり、2点間の距離を計測する場合、例えば、図17の斜視図に示すように立体的被計測物であるパイプ52の2点の3次元座標を求め、2点間の距離dを求める場合に適用される。この計測方式を選択するとステップS190にジャンプする。他の1つは、くぼみ計測であり、点と直線間の距離を計測する場合、例えば、図18の斜視図に示すように、タービンブレード53の欠損等の大きさ(欠け部分の寸法h)等を計測する場合に適用される。この計測方式が選択されるとステップS200にジャンプする。
【0048】
上記ステップS172にジャンプした場合、ステップS173〜ステップS175において、基準平面設定用の3点の基準点PTを設定する。例えば、図15に示す被計測物のパイプ51の場合、測定基準点PT1,PT2,PT3を設定する。そして、後述するサブルーチン3次元座標解析処理(図14(A)参照)により上記3点の3次元座標を求める。
【0049】
ステップS176で点PT指示値をインクリメントし、ステップS177で上記3点が作る平面の深さの基準平面として設定する。図15の場合、点PT1,PT2,PT3を含む平面M1を設定する。さらに、ステップS178で測定点、例えば、PT4を設定し 、S179でサブルーチン3次元座標解析処理(図14(A)参照)を呼び出して実行して測定点の座標を求める。図16の場合、点PT4の座標を求める。
【0050】
ステップS180において、基準平面から測定点間の距離、図16の場合、測定点PT4から前記基準平面M1までの腐食の深さを与える距離hを演算し、本ルーチンを終了する。
【0051】
次に、ステップS190にジャンプした場合は、ステップS191で第1測定点を設定し、ステップS192でサブルーチン3次元座標解析処理を実行し、上記第1測定点の座標を求める。さらに、ステップS193で第2測定点を設定し、ステップS194でサブルーチン3次元座標解析処理を実行し、上記第2測定点の座標を求める。その後、ステップS195において上記第1,第2測定点の座標から上記2点間の距離dを演算し、本サブルーチンを終了する。
【0052】
なお、上記の処理において、被計測物が図17に示すパイプ52であって、第1,第2測定点がPT5,PT6であった場合、上記計測により上記2測定点間の距離dが求められる。
【0053】
さらに、ステップS200にジャンプした場合は、ステップS201でくぼみの一端に第1基準点を設定し、ステップS202でサブルーチン3次元座標解析処理を実行し、上記第1基準点の座標を求める。さらに、ステップS203でくぼみの他端に第2基準点を設定し、ステップS204でサブルーチン3次元座標解析処理を実行し、上記第2基準点の座標を求める。ステップS205において上記第1,第2基準点の座標から上記2点間を結ぶ基準直線を設定する。
【0054】
ステップS206でくぼみの測定点を設定する。ステップS207でサブルーチン3次元座標解析処理を実行し、上記測定点の座標を求める。ステップS208で上記基準点を結ぶ直線と測定点の垂線の長さhをくぼみ量として演算し、本ルーチンを終了する。
【0055】
なお、上記のサブルーチンの処理で被計測物が図18に示すタービンブレード53であった場合、第1,第2基準点PT7,PT8を結ぶ基準直線とくぼみの測定点PT9までの距離hを求めることになる。
【0056】
次に、上記ステップS175,S192,S202、その他のステップでコールされるサブルーチンの3次元座標解析処理について、図14(A)のフローチャートにより説明する。
ステップS211にてサブルーチンのパターンマッチング処理を実行して、左右の2画像(ステレオ画像)の対応点であるマッチングポイントを検出する。ステップS212にて対応点の座標から左右の2画像のずれ量を求める。ステップS213にて対象としている点の3次元座標を計算し、本ルーチンを終了する。
【0057】
ここで、上記サブルーチンにおける3次元座標解析処理の基本原理について、図19を用いて説明する。
図19は、x,y,z軸をもつ3次元座標系上の右左2画像位置関係を示す図であって、被写体の点Pが撮像素子28の右結像面28R、左結像面28L上に結像した状態を示している。本図において、点OR,OLを光学系の瞳位置とし、距離fを焦点距離とし、点QR,QLを点Pの結像位置とし、さらに、距離Lを点OR−点OL間の距離とする。
【0058】
図19において、直線QR−ORから次式が成立する。すなわち、
x/xR ′={y−(L/2)}/{yR ′−(L/2)}=z/(−f)…(10)
また、直線QL−OLから次式が成立する。すなわち、
x/xL ′={y+(L/2)}/{yL ′+(L/2)}=z/(−f)…(11)
この式をx、y、zについて解けば、点Pの3次元座標が得られる。
【0059】
次に、図14(A)の3次元座標解析処理のステップS211にてコールされるサブルーチンのパターンマッチング処理について、図14(B)のフローチャートにより説明する。
本ルーチンでは、2画像間の対応点を検出するパターンマッチングを行う。図20は、左右2画面55,56の画像をモニタ14上に表示したステレオ計測画面54を示しており、左画面55の画像ポイントPP1が右画面56の画像ポイントPP2に対応していることを示している。
【0060】
まず、ステップS221,222にて、パターンマッチングを行うパターンの大きさの設定するパターンエリアの絞り込みを行う。本実施の形態の例では、値kに対応したパターンエリアを設定する。すなわち、
k=1ではパターンエリアを36x36(ピクセル)、
k=2ではパターンエリアを24x24(ピクセル)、
k=3ではパターンエリアを12x12(ピクセル)、
とし、値kを小から大へ切り換えて領域を大から小へ絞り込んでいき、対応点検出の精度を上げるようにする。
【0061】
ステップS223にて検索範囲を設定する。すなわち、パターンを探す右画像の領域を決定する。その検索範囲の設定には、エピポーララインに誤差を考慮してエピポーラ±5ピクセル以内とする場合と、モニタ画面上で水平に±7ピクセル以内とする場合と、画面上で手動により指示された略マッチング点を中心に±10ピクセル以内とする場合がある。なお、上記±10ピクセルは、手動による誤差を考慮した最適な値である。
【0062】
ステップS224〜S226において、設定された検索範囲でのパターンマッチングを行う。このパターンマッチングは、正規化相互相関による対応点検出を行い、最も正規化相互相関係数の大きな座標(X、Y)を上記対応点とする。
【0063】
ステップS227において、値kをインクリメントし、その値kに対応してパターンを絞り込み、対応点検出を行う。ステップS228においてマッチングポイントの設定を行う。そのとき、正規化相互相関の値をモニタ画面上に表示、これをマッチングの信頼性の尺度としてもよい。また、正規化相互相関の値(0〜1)が所定の値よりも小さい場合は、手動式のマッチング処理に切り換えてもよい。
【0064】
上記パターンマッチングに利用する正規化相互相関関数M(u,v)は、一般的な以下の式を用いる。すなわち、t(x,y)をテンプレートとし、f(x,y)を画像データとし、t′をテンプレートの平均輝度とし、さらに、f′を画像の平均輝度として、
【数1】
【0065】
上述の実施の形態の画像データの処理は、簡潔に説明するために画像にモノクロ画像を用いた場合として説明したが、これらの処理は、R、G、B信号によるカラー画像に拡張しても同様に有効であることは勿論である。
【0066】
以上、説明したように本実施の形態の計測内視鏡システム1によれば、計測精度を向上するのために、光学アダプタ4に一対一で対応するように特有の光学データを記録媒体のFD33で提供し、生産治具39(マスタ撮像装置34)と内視鏡画像との座標のずれを補正したことにより、計測精度を向上させることができる。
【0067】
また、計測用の光学アダプタ4の生産に生産治具39(マスタ撮像装置34)を用いて特有の光学データ取りを行ったため、生産性が向上して計測内視鏡システム1を低価格で提供できるようになった。
また、内視鏡先端部5に計測用光学アダプタ4を着脱自在に設けたため、他の計測以外の光学アダプタとの交換が可能になり、内視鏡の汎用性を向上させ、ユーザーの金銭的負担を抑えることができる。
【0068】
また、本実施の形態の例では画像の座標変換に使用するウエイトテーブルW1〜W4、座標参照テーブルQX、QYを生産治具39のコンピュータ36で作成して記録媒体のFD33に記録したため、計測装置3内部のコンピュータでテーブルを作成する必要がない。したがって、計測処理を短時間で行うことができる。
さらに、正規化相互相関の値をモニタ14の画面上に表示することにより、操作者は、マッチングの信頼性、あるいは、計測の信頼性を知ることができる。また、正規相互相関の値が小さい場合は、手動式のマッチングに切り換えることができ、正確度の高い計測が可能になった。
【0069】
次に、本発明の第2の実施の形態の計測内視鏡システムについて説明する。
本実施の形態の計測内視鏡システムの構成は、前記第1の実施の形態のシステム構成と同様の構成を有するものとし、計測制御方式のみが異なる。したがって、同一の構成部材には同一の符号を付して説明ずる。
【0070】
本実施の形態の計測内視鏡システムにおいては、記録媒体であるFD33に記録され、光学アダプタ4に一対一で対応する特有の光学データの内容のうち、記録される幾何学的歪み補正テーブル作成用パラメータのみが前記第1の実施の形態のものと異なる。すなわち、
(a′)幾何学的歪み補正テーブル作成用パラメータとして、前記(1)式、および、(2)式の係数anm,bnmを記録する。
【0071】
(b)2つのレンズ系の焦点距離として、前記第1実施の形態の場合と同様に右画像の焦点距離fR、および、左画像の焦点距離fLを記録する。
【0072】
(c)2つのレンズ系の光軸座標として、前記第1実施の形態の場合と同様に右画像の光軸座標XR,YRと、左画像の光軸座標XL,YLを測定し、記録する。
【0073】
(d)マスタに対する位置情報(視野形状パターン)として、前記第1実施の形態の場合と同様に基準ラインVの輝度データである、
PV(100,Yn) 但し、Yn=1,2,3,…480
また、基準ラインHの輝度データである、
PH(Xn,100) 但し、Xn=1,2,3,…640
を測定して記録する。
【0074】
図21は、第2の実施の形態の計測内視鏡システムにおけるステレオ計測処理のフローチャートである。本ステレオ計測処理において、ステップS302とS309の処理以外は、前記図8に示した第1の実施の形態のルーチンと同一である。
上記ステップS302の補正画像情報データの読み込みは、上述の(a′),(b),(c),(d)の光学データを計測装置3に内蔵するコンピュータ18で取り込んでマスタデータを作成する処理である。
【0075】
また、上記ステップS309でコールされるサブルーチン計測処理は、図22のフローチャートに示す。本ルーチンにおいて、長さ計測におけるステップS352〜S356、および、くぼみ計測におけるステップS361〜S368の処理は、それぞれ図13に示した第1の実施の形態でのサブルーチン計測処理のステップSS190〜S194、および、ステップS200〜S207の処理と同一である。但し、上記ステップS356、および、S368より後の処理が異なる。
【0076】
すなわち、長さ計測におけるステップS357において、第1の測定点p1のz座標値z1と、第2の測定点p2のz座標値z2の差をチェックし、所定の値dzよりも大きければ、ステップS358の処理を行い、大きくなければ、ステップS359の処理を行う。
【0077】
上記ステップS358の処理は、3次元座標での計算を行う処理である。一方、上記ステップS359の処理は、2次元座標での計算を行う。すなわち、第1の測定点p1と第2の測定点p2の2点間の距離を求める場合、x,y軸の2次元座標での計算を行う。
【0078】
上述のようにz座標値の差の大小により異なった処理を実行させる理由は、左右2画像を用いるステレオ計測では、3次元座標のうち、奥行き情報であるz座標の計測誤差がx,y座標よりも悪い。したがって、第1の測定点p1と第2の測定点p2のz座標の差dzが所定の値よりも小さい状態であれば、2点間の距離をx、y座標のみを用いて計算した方が誤差が少なく、より精度の高い計測を行うことができるためである。
【0079】
また、くぼみ計測におけるステップS368より後のステップS369において、各点のz座標の差の値をチェックする。すなわち、第1の基準点P1と第2の基準点P2のz座標の値をz1,z2とし、測定点P3、および、その測定点の基準直線と直交する交点P4のz座標の値をz3,z4とした場合、それぞれ差の値(z1−z2)および(z3−z4)を所定の値dzと比較し、共に大きい場合は、ステップS370に進み、3次元座標での計算を行い。共に大きくない場合は、ステップS371に進み、2次元座標での計算を行う。このように処理することによって、前述の場合と同様の理由により、より精度の高いくぼみ計測を行うことができる。
【0080】
次に、上記第1、または、第2の実施の形態の計測内視鏡システムにおける計測処理時におけるモニタ表示方式について説明する。
図23は、液晶モニタ14の表示画面61の例を示しており、図23(A)は、内視鏡により撮像した左右の画像L62,画像R63を表示した状態、また、図23(B)は、左右画像とメニュー画面を表示した例を示す。このように液晶モニタ14の画面61の左側に左画像L62または右画像R63を選択してどちらか一方のみ表示し、右側にメニュー64を表示すると、左側の画像を参照しながら右側のメニュー64を選択することができ、その選択がやり易くなる。
【0081】
図24(A)は、液晶モニタ14の画面61に内視鏡により撮像し、エッジ部65a,66aを抽出した左右の画像L65,画像R66を表示した例を示す。図24(B)は、左の画像L65を表示し、エッヂ部66aを重ねた状態として表示した例を示す。ステレオ画像のマッチングにおける対応点検出を行う場合に、どちらか片方の画像のエッジ画像を残りの画像に手動によりカーソル等をもちて移動し、重ね合わせるようにすれば、対応点検出が容易になる。
【0082】
図25は、液晶モニタ14の画面61の左右の画像L62,R63の表示例を示し、図25(A)が左右の画像L62,R63をそれぞれ左側と右側に表示した状態を示し、図25(B)が左右の画像L62,R63を入れ替えて表示した状態を示している。
【0083】
一枚の撮像素子でステレオ画像を取り込んだ場合、従来の装置では液晶モニタ14上では本来の右画像が左側に表示され、本来の左画像が右側に表示され、操作者が誤解する可能性があった。しかし、上記図25(A)は、本来の左画像L62を左側に、右画像L63を右側に表示したものである。このように表示することによって、人間の目で見た状態と同じ表示できるので計測を行う場合の誤解を防ぐことができる。
【0084】
図26は、液晶モニタ14において、左右画像のインターレース表示を行った例を示す。本モニタ表示例は、図26(A)に示すように右画像R63をTVインターレース表示の偶数ラインで表示し、図26(B)に示すように左画像L62を奇数ラインで表示している。そして、上記図26(A)および(B)の画像をインターレースに同期した図示しない液晶シャッター眼鏡によるステレオ視(立体視)を可能とする表示例である。右画像と左画像の表示位置は立体視できる位置に補正して表示するものとする。本表示例によると操作者は、実際に近い状態で被計測物の画像を観察することができる。
【0085】
次に、本発明の第3の実施の形態の計測内視鏡システムについて説明する。
本計測内視鏡システムは、計測制御に用いられ、記録媒体に記録される光学アダプタ特有の光学データのうち、特に幾何学的歪み補正テーブルの演算方法が前記第1の実施の形態のものと異なるものである。したがって、その他の構成は、前記第1の実施の形態のシステムの構成と同様であり、同一の構成部材には同一の符号を付して説明ずる。
【0086】
本実施の形態のシステムにおいても前記図4に示す生産用治具39により光学アダプタの特有の光学データが測定されて、そのデーターは記録媒体であるFD33に記録される。上記光学データは以下の情報が記録される。すなわち、
(a″)2つの画像の画像の幾何学的歪み補正テーブルとして、前記第1の実施の形態の場合と同形式のデータがFD33に記録される。
【0087】
ウエイトテーブルとして、
W1(X,Y)
W2(X,Y)
W3(X,Y)
W4(X,Y)
座標参照テーブルとして、
QX(X,Y)、QY(X,Y)
但し、後述するようにそれら値を求める演算が異なる。
【0088】
一般にレンズ系による画像には光学的な歪みがある。計測を行う場合にはこの歪みが大きな誤差原因となるため、座標変換を行うことによりこの歪みが取り除かれる。前記図6,7、および、図27の幾何学的歪み補正テーブル作成のための座標系を示す図、図28の光学系の像高を示す原理図、図29の画像データ上の変換座標を示す図をもとに本実施の形態での補正テーブルの求め方を説明する。
【0089】
点p1〜p4は、座標変換前のピクセルを示す。点p1〜p4をf(x,y)により座標変換すると、p1′〜p4′となる。このときp1′〜p4′の座標は実数値の座標となる。液晶モニタ上に表示するにはピクセル単位、つまり、整数値の座標で示されるP(X,Y)へ変換しなければならない。その変換をウエイトテーブルW1〜W4にて行う。この座標変換は、第1の実施の形態の場合と同じであるが、本実施の形態の場合は、上述の座標変換のf(x,y)に以下の式を用いる点が異なる。すなわち、
【数2】
【0090】
なお、(14)式,(15)式は、対物レンズの幾何学的歪みの特性により使い分ける。また、Ks ,Kt は、対物レンズの幾何学的歪みの程度により値を変更する。fは、焦点距離を示す。k1,k2は、2画像の倍率を合わせる係数で焦点距離fR,fLの関数となる。
【0091】
そして、点p1〜p4の座標(x,y)〜(x+1,y+1)を代入し、(18),(19)式により点p1′(x′,y′)〜p4′(x′+1,y′+1)の座標(x′,y′)〜(x′+1,y′+1)を得る。この座標データに基づいて、前記座標参照テーブルQX(X,Y),QY(X,Y)を求める。
なお、上述した本実施の形態の例に示す座標系は、これに限定されるものではなく必要に応じて様々な座標系が利用できる。
【0092】
また、変換後の画素データP(X,Y)は、上記p1′〜p4′の座標データから前記第1の実施の形態の場合と同様にW1〜W4を用いて次式より求めることができる。
但し、dnは、点p1′〜p4′と点P(X,Y)までの距離を示し、
S=d1+d2+d3+d4
W1=d1/S
W2=d2/S
W3=d3/S
W4=d4/S
として、
P(X,Y)=W1×p1′+W2×p2′+W3×p3′+W4×p4′
となる。
【0093】
上記W1,W2,W3,W4をウエイトテーブルと、座標P(X,Y)の作成に必要な原画像の座標x,yを与えるQX(X,Y)、QY(X,Y)の座標参照テーブルとを幾何学的歪み補正テーブルとしてFD33に記録する。
【0094】
また、他の特有の光学データとして、
(b)2つのレンズ系の焦点距離として、前記第1実施の形態の場合と同様に右画像の焦点距離fR、および、左画像の焦点距離fLを記録する。
(c)2つのレンズ系の光軸座標として、前記第1実施の形態の場合と同様に右画像の光軸座標XR,YRと、左画像の光軸座標XL,YLを測定し、記録する。
(d)マスタに対する位置情報(視野形状パターン)として、前記第1実施の形態の場合と同様に基準ラインVの輝度データである、
PV(100,Yn) 但し、Yn=1,2,3,…480
また、基準ラインHの輝度データである、
PH(Xn,100) 但し、Xn=1,2,3,…640
を測定して記録する。
【0095】
なお、本実施の形態の計測内視鏡システムにおける計測処理時のモニタ表示方式についても、前述の図23〜図26で説明した方式をそのまま適用できることは勿論である。
【0096】
次に、本発明に関連する実施の形態の計測内視鏡装置としてジェットエンジンのブレード検査用の検査システムについて説明する。
従来のタービンブレードの検査は、内視鏡画像を観察しながらターニングツール、例えば、モータによりタービンのシャフトを回転させる治具でブレードを回転移動させて、所定の位置へ到達たところで作業者が上記ターニングツールを停止させ、そこで計測を行われていた。ところが、ブレードの構成枚数は数百枚もあって、ブレード1枚ずつ移動停止を行うため、作業性が非常に悪かった。本システムは、そのような不具合を解決することができるもので、作業性のよいブレードの検査システムを提供するものである。
【0097】
図30は、上記ブレードの検査を行う検査システムのシステム構成図である。本検査システムは、ボアスコープ101、TVカメラ102、ターニングツール103、コントローラ104、前記図1、または、図2に示したものと同様の計測装置3により構成される。被検査物は、ジェットエンジン100のタービンブレード105(図31参照)とする。
【0098】
TVカメラ102の画像は、計測装置3に入力され、コンピュータにより画像処理される。コンピュータには停止させたい位置にあるブレード画像を予め基準ブレード画像として記録させておく。図31(A)は、モニタ14に表示される上記基準ブレード画像を示す図である。図31(B)は、ブレード105を回転せているときの状態でのブレード105の画像を示す図である。内視鏡画像を前記記録された基準ブレード画像とパターンマッチングさせて、類似度を示す尺度である正規化相互相関係数が最も大きくなったときに、計測装置3からコントローラ104へターニングツール103の停止信号を送り、ブレードを所定の位置で停止させる。所定の時間停止させた後、コントローラへ回転信号を送り次のブレードの検査を行う。
【0099】
上述の検査システムによれば、前述の従来の不具合を解決することができ、作業性のよいブレードの検査システムを提供することができる。なお、本実施の形態のシステムの変形例として、ブレード画像の自動記録を行ってもよい。また、基準画像と比較することによりブレードの欠陥の自動検査も可能になる。これらの変形例等により検査効率を飛躍的に高められる。
【0100】
[付記]
1. 内視鏡先端部に着脱自在に設けられた1対の対物レンズを有する光学アダプタと前記1対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡、および、前記内視鏡画像を用いて画像処理により計測を行う計測内視鏡装置において、
少なくとも、前記光学アダプタの光学データを記録した記録媒体から情報を読み込む処理と、
前記内視鏡本体の撮像系の位置誤差を基に前記光学データを補正する処理と、前記補正した光学データをもとに計測する画像を座標変換する処理と、
座標変換された2つの画像を基に2画像のマッチングにより任意の点の3次元座標を求める処理と
を行う計測手段を有することを特徴とする計測内視鏡装置。
【0101】
2.付記1の計測内視鏡装置において前記光学アダプタの光学データは少なくとも以下の項目を含むことを特徴とする。すなわち、
2つの光学系の幾何学的歪み補正テーブル、
2つの光学系の基準撮像系上での光軸の位置座標、
2つの光学系の基準撮像系上での結像位置情報。
【0102】
3.付記1の計測内視鏡において前記光学アダプタの光学データは少なくとも以下の項目を含むことを特徴とする。すなわち、
2つの光学系の幾何学的歪み補正テーブル、
2つの光学系の基準撮像系上での光軸の位置座標、
2つの光学系の基準撮像系上での結像位置情報、
2つの光学系の焦点距離。
【0103】
4.付記1の計測内視鏡装置において前記光学アダプタの光学データは少なくとも以下の項目を含むことを特徴とする。すなわち、
2つの光学系の幾何学的歪み補正テーブル、
2つの光学系の基準撮像系上での光軸の位置座標、
2つの光学系の基準撮像系上での結像位置情報、
2つの光学系の焦点距離、
2つの光学系の光軸間の距離、
2つの光学系の幾何学的歪みの中心座標。
【0104】
5.付記1の計測内視鏡装置において前記光学アダプタの光学データは少なくとも以下の項目を含むことを特徴とする。すなわち、
2つの光学系の幾何学的歪み補正テーブル作成用パラメータ、
2つの光学系の基準撮像系上での光軸の位置座標、
2つの光学系の基準撮像系上での結像位置情報、
2つの光学系の焦点距離、
2つの光学系の光軸間の距離。
【0105】
6.内視鏡先端部に着脱自在に設けられた1対の対物レンズを有する光学アダプタと前記1対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡および前記内視鏡画像を用いて画像処理により計測を行う計測内視鏡装置において、
少なくとも、あらかじめ前記光学アダプタを基準となる第1の治具に取り付けたときの、主となる撮像素子上での結像位置情報と光学系の幾何学的歪み補正テーブルと焦点距離と2つの対物レンズ系の光軸の位置情報を記録した記録媒体から情報を読み込む処理と、
前記光学アダプタを第2の内視鏡に取り付けた場合の撮像素子上の結像位置と前記記録媒体の結像位置情報を比較することにより位置ずれ量を求める処理と、
前記位置ずれ量を用いて前記記録媒体の光学系の幾何学的歪み補正テーブルの座標を補正して真の補正テーブルを作成する処理と、
前記内視鏡により撮像した画像を前記真の補正テーブルをもとに座標変換する処理と、
座標変換された2つの画像を基に、2画像のマッチングにより任意の点の3次元座標を求める処理と
を行う計測手段を有することを特徴とする計測内視鏡装置。
【0106】
7.付記6の計測内視鏡装置において、
光学アダプタを第2の内視鏡に取り付けた場合の撮像素子上の結像位置は略白色体を撮像した画像と、前記記録媒体の結像位置情報を基にパターンマッチング処理を行うことにより位置ずれ量を求めることを特徴とする。
【0107】
8.付記6の計測内視鏡装置において、
2画像のマッチングにより任意の点の2次元座標を求める場合に、マッチングの信頼性を示す尺度をモニタ画面上に表示することを特徴とする。
【0108】
9.付記8の計測内視鏡装置において、
2画像のマッチングの信頼性が所定の値よりも低い場合は、2画像のマッチングを手動操作に切り換えることを特徴とする。
【0109】
10.付記6の計測内視鏡装置において、
2画像のマッチングは、2画像のうちマッチング点を指示する1画像のみをモニタ画面上に表示することを特徴とする。
【0110】
11.付記6の計測内視鏡装置において、
2画像のマッチングは、2画像のうち1画像上でマッチング点を指示し、一方の画像へのマッチング点の探査はエピポーララインに誤差幅をもたせた領域を自動探査することを特徴とする。
【0111】
12.付記6の計測内視鏡装置において、
2画像のマッチングは、それぞれの画像上のマッチング点の指示を手動で行うことを特徴とする。
【0112】
13.付記6の計測内視鏡装置において、
2画像のマッチングは、2画像のうち1画像上でマッチング点を指示し、一方の画像へのマッチング点の探査は、一方の画像上の略マッチング点の指示を手動で行い、その後、略マッチング点の指示を中心としてx、y方向に±10ピクセル以内の範囲を自動探査することを特徴とする。
【0113】
14.内視鏡先端部に着脱自在に設けられた1対の対物レンズを有する光学アダプタと前記1対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡および前記内視鏡画像を用いて画像処理により計測を行う計測手段を有する計測内視鏡装置において、
前記光学アダプタの光学データを記録した記録媒体を有し、前記計測手段は、前記記録媒体から前記光学データを読み出す読み出し手段を有し、前記計測手段は、前記光学データに基づき画像処理演算を行う画像処理演算部を有することを特徴とする計測内視鏡装置。
【0114】
【発明の効果】
上述したように本発明の計測内視鏡装置によれば、光学系の各種光学データを記録し、計測内視鏡装置でその値を読み込み、内視鏡の撮像系の誤差を基に光学データを補正して座標変換を用いたため、計測精度のよい計測内視鏡装置を提供できる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態を示す計測内視鏡装置である計測内視鏡システムの全システム構成図。
【図2】図1の計測内視鏡システムのブロック構成図。
【図3】図1の計測内視鏡システムの内視鏡挿入部の先端部拡大斜視図。
【図4】図3のA−A断面図。
【図5】図1の計測内視鏡システムにて生産測定治具による光学データ測定状態の斜視図。
【図6】図1の計測内視鏡システムにおける幾何学的歪みの補正前の画像と補正後の画像のピクセル配置図。
【図7】図1の計測内視鏡システムにおける補正前の画像ピクセルと補正後の画像ピクセルを示す図。
【図8】図1の計測内視鏡システムにおけるステレオ計測処理のフローチャート。
【図9】図8のステレオ計測処理でコールされるサブルーチンのフローチャートを示し、図9(A)は、画像位置設定処理のフローチャート、図9(B)は、画像補正処理のフローチャート。
【図10】図1の計測内視鏡システムにおける光学アダプタをマスタ撮像ユニットに装着して撮像される白色チャートの画像を示す図。
【図11】図1の計測内視鏡システムにおいて光学アダプタを本システムの内視鏡に装着して撮像される白色チャートの画像を示す図。
【図12】図1の計測内視鏡システムおよびマスタに対する視野形状パターンを与える輝度波形であって、図12(A)は、画像の垂直方向のPV,PV′の輝度変化、図12(B)は、画像の水平方向のPH,PH′の輝度変化を示す図。
【図13】図8のステレオ計測処理においてコールされるサブルーチンの計測処理のフローチャート。
【図14】図13の計測処理でコールされるサブルーチンのフローチャートであって、図14(A)は、3次元座標解析処理のフローチャート、図14(B)は、パターンマッチング処理のフローチャート。
【図15】図1の計測内視鏡システムを用いて深さ計測状態のパイプの斜視図。
【図16】図15のパイプの計測部分の拡大図。
【図17】図1の計測内視鏡システムを用いて長さ計測状態のパイプの斜視図。
【図18】図1の計測内視鏡システムを用いてくぼみ計測状態のタービンブレードの斜視図。
【図19】図1の計測内視鏡システムにおける3次元座標解析処理の基本原理を説明するためのx,y,z軸をもつ3次元座標系上の右,左2画像位置関係を示す図。
【図20】図1の計測内視鏡システムにおける左右2画面の画像をモニタ上に表示したステレオ計測画面を示す図。
【図21】本発明の第2の実施の形態の計測内視鏡システムにおけるステレオ計測処理のフローチャート。
【図22】図21のステレオ計測処理においてコールされるサブルーチンの計測処理のフローチャート。
【図23】図1の計測内視鏡システムの表示方式の1例における液晶モニタの表示画面を示す図であって、図23(A)は、左右2画像を表示した状態、図23(B)は、左、または、右画像と処理メニュー画面とを表示した状態を示す。
【図24】図1の計測内視鏡システムの表示方式の他の例における撮像画像のエッジ部を抽出した左右画像を表示したモニタ画面を示す図であって、図24の(A)は、2画面の左右画像を表示した状態、図24(B)は、左右画像を重ねて表示した状態を示す。
【図25】図1の計測内視鏡システムの表示方式の他の例における液晶モニタの画面の左右の画像の表示例を示し、図25(A)が左右の画像をそれぞれ左側と右側に表示した状態を示し、図25(B)が左右の画像を入れ替えて表示した状態を示している。
【図26】図1の計測内視鏡システムの表示方式の他の例における液晶モニタに左右画像のインターレース表示を行った例を示し、図26(A)に右画像をTVインターレース表示の偶数ラインで表示し、図26(B)に左画像を奇数ラインで表示する。
【図27】本発明の第3の実施の形態の計測内視鏡システムにおける幾何学的歪み補正テーブル作成のための座標系を示す図。
【図28】図27の計測内視鏡システムにおける幾何学的歪み補正テーブル作成のための光学系の像高を示す原理図。
【図29】図27の計測内視鏡システムにおける幾何学的歪み補正テーブル作成のための画像データ上の変換座標を示す図。
【図30】本発明に関連する実施の形態の計測内視鏡装置としてのジェットエンジンのブレード検査システム構成図。
【図31】図30のブレード検査システムにおけるブレード画像を示す図であって、図31(A)は、基準位置にあるブレードを示す図であり、図31(B)は、ブレード回転状態でのブレード画像を示す図。
【符号の説明】
1 ……計測内視鏡
2 ……内視鏡(内視鏡本体)
4 ……光学アダプタ
21,22……対物レンズ
33 ……フロッピディスク(記録媒体)
Claims (13)
- 内視鏡先端部に着脱自在に設けられた一対の対物レンズを有する光学アダプタと前記一対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡を有しており、前記内視鏡の画像を用いた画像処理により計測を行う計測内視鏡装置において、少なくとも、前記光学アダプタの光学データを記録した記録媒体から情報を読み込む処理と、前記内視鏡本体の撮像系の位置誤差を基に前記光学データを補正する処理と、前記補正した光学データをもとに計測する画像を座標変換する処理と、座標変換された2つの画像を基に2画像のマッチングにより任意の点の3次元座標を求める処理と、を行う計測処理手段を有することを特徴とする計測内視鏡装置。
- 前記光学アダプタの光学データは、少なくとも2つの光学系の幾何学的歪み補正テーブル、2つの光学系の基準撮像系上での光軸の位置座標、2つの光学系の基準撮像系上での結像位置情報を含むことを特徴とする請求項1に記載の計測内視鏡装置。
- 前記光学アダプタの光学データは、2つの光学系の焦点距離を含むことを特徴とする請求項2に記載の計測内視鏡装置。
- 前記光学アダプタの光学データは、2つの光学系の光軸間の距離、2つの光学系の幾何学的歪みの中心座標を含むことを特徴とする請求項3に記載の計測内視鏡装置。
- 前記光学アダプタの光学データは、少なくとも2つの光学系の幾何学的歪み補正テーブル作成用パラメータ、2つの光学系基準撮像系上での光軸の位置座標、2つの光学系の基準撮像系上での結像位置情報、2つの光学系の焦点距離、2つの光学系の光軸間の距離を含むことを特徴とする請求項1に記載の計測内視鏡装置。
- 内視鏡先端部に着脱自在に設けられた一対の対物レンズを有する光学アダプタと前記一対の対物レンズによる2つの像が内視鏡本体に設けられた撮像素子上の異なる位置に結像するように配置された内視鏡および前記内視鏡画像を用いて画像処理により計測を行う計測内視鏡装置において、少なくとも、あらかじめ前記光学アダプタを基準となる治具に取り付けたときの、主となる撮像素子上での結像位置情報と光学系の幾何学的歪み補正テーブルと焦点距離と2つの対物レンズ系の光軸の位置情報を記録した記録媒体から情報を読み込む処理と、前記光学アダプタを前記内視鏡に取り付けた場合の撮像素子上の結像位置と前記記録媒体の結像位置情報を比較することにより位置ずれ量を求める処理と、前記位置ずれ量を用いて前記記録媒体の光学系幾何学的歪み補正テーブルの座標を補正して真の補正テーブルを作成する処理と、前記内視鏡により撮像した画像を前記真の補正テーブルをもとに座標変換する処理と、座標変換された2つの画像を基に2画像のマッチングにより任意の点の3次元座標を求める処理とを行う計測手段を有することを特徴とする計測内視鏡装置。
- 前記光学アダプタを前記内視鏡に取り付けた場合の撮像素子上の結像位置は略白色体を撮像した画像と、前記記録媒体の結像位置情報を基にパターンマッチング処理を行うことにより位置ずれ量を求めることを特徴とする請求項6に記載の計測内視鏡装置。
- 前記2画像のマッチングにより任意の点の2次元座標を求める場合に、マッチングの信頼性を示す尺度をモニタ画面上に表示することを特徴とする請求項1または6に記載の計測内視鏡装置。
- 前記2画像のマッチングは、2画像のうちマッチング点を指示する1画像のみをモニタ画面上に表示することを特徴とする請求項1または6に記載の計測内視鏡装置。
- 前記2画像のマッチングは、2画像のうち1画像上でマッチング点を指示し、一方の画像へのマッチング点の探査はエピポーララインに誤差幅をもたせた領域を自動探査することを特徴とする請求項1または6に記載の計測内視鏡装置。
- 前記2画像のマッチングは、2画像のうち1画像上でマッチング点を指示し、一方の画像へのマッチング点の探査は、一方の画像上の略マッチング点の指示を手動で行い、その後、略マッチング点の指示を中心としてx、y方向に±10ピクセル以内の範囲を自動探査することを特徴とする請求項1または6に記載の計測内視鏡装置。
- 内視鏡先端部に着脱自在に設けられ、一対のステレオ画像を得るための光学系を有する光学アダプタと、前記ステレオ画像を用いた画像処理により計測を行う計測内視鏡装置において、
少なくとも、前記光学系の光学データを読み込む処理と、読み込まれた前記光学データを補正する処理と、前記補正した光学データをもとに計測する画像を座標変換する処理と、座標変換された画像を基にマッチングにより任意の点の3次元座標を求める処理と、を行う計測処理手段を有することを特徴とする計測内視鏡装置。 - 前記光学系の光学データは、所定の記録媒体に記録されていることを特徴とする請求項12に記載の計測内視鏡装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05811497A JP3771988B2 (ja) | 1997-03-12 | 1997-03-12 | 計測内視鏡装置 |
| US09/036,216 US6063023A (en) | 1997-03-12 | 1998-03-06 | Measuring endoscope system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05811497A JP3771988B2 (ja) | 1997-03-12 | 1997-03-12 | 計測内視鏡装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10248806A JPH10248806A (ja) | 1998-09-22 |
| JP3771988B2 true JP3771988B2 (ja) | 2006-05-10 |
Family
ID=13074963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP05811497A Expired - Lifetime JP3771988B2 (ja) | 1997-03-12 | 1997-03-12 | 計測内視鏡装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6063023A (ja) |
| JP (1) | JP3771988B2 (ja) |
Families Citing this family (74)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10314121A (ja) * | 1997-05-15 | 1998-12-02 | Olympus Optical Co Ltd | 画像処理装置および画像処理装置用記録媒体 |
| JP3790371B2 (ja) * | 1998-10-09 | 2006-06-28 | 日本放送協会 | 立体画像装置 |
| JP4493113B2 (ja) * | 1999-01-29 | 2010-06-30 | 株式会社リコー | プロジェクタおよび投影画像補正装置 |
| JP4343341B2 (ja) * | 1999-09-01 | 2009-10-14 | オリンパス株式会社 | 内視鏡装置 |
| JP4468544B2 (ja) | 2000-04-03 | 2010-05-26 | オリンパス株式会社 | 内視鏡装置 |
| JP4632577B2 (ja) * | 2001-05-30 | 2011-02-16 | オリンパス株式会社 | 計測内視鏡装置 |
| JP4873794B2 (ja) * | 2001-05-30 | 2012-02-08 | オリンパス株式会社 | 画像処理計測装置及び計測内視鏡装置 |
| JP4610799B2 (ja) | 2001-06-25 | 2011-01-12 | オリンパス株式会社 | 立体観察システム、及び内視鏡装置 |
| US6945930B2 (en) | 2001-08-31 | 2005-09-20 | Olympus Corporation | Environment adaptable measurement endoscope |
| US6980227B2 (en) * | 2001-10-01 | 2005-12-27 | Pentax Corporation | Electronic endoscope with light-amount adjustment apparatus |
| US7101334B2 (en) * | 2001-10-31 | 2006-09-05 | Olympus Corporation | Optical observation device and 3-D image input optical system therefor |
| US9155544B2 (en) * | 2002-03-20 | 2015-10-13 | P Tech, Llc | Robotic systems and methods |
| JP3938721B2 (ja) | 2002-07-01 | 2007-06-27 | オリンパス株式会社 | 計測用内視鏡装置 |
| JP3938722B2 (ja) * | 2002-07-03 | 2007-06-27 | オリンパス株式会社 | 内視鏡装置 |
| JP2004049638A (ja) * | 2002-07-22 | 2004-02-19 | Olympus Corp | 内視鏡装置 |
| WO2004036266A2 (en) * | 2002-10-18 | 2004-04-29 | Acmi Corporation | Removable optical assembly for a medical instrument |
| US20040181128A1 (en) * | 2003-03-11 | 2004-09-16 | Masters Martin W. | Determining the geometry and dimensions of a three-dimensional object |
| JP4564239B2 (ja) * | 2003-04-11 | 2010-10-20 | オリンパス株式会社 | 内視鏡装置 |
| IL156074A0 (en) * | 2003-05-22 | 2003-12-23 | Israel Aircraft Ind Ltd | Measurement system for indirectly measuring defects |
| JP4790223B2 (ja) * | 2004-01-20 | 2011-10-12 | オリンパス株式会社 | 計測用内視鏡装置 |
| FR2868550B1 (fr) * | 2004-04-02 | 2006-09-29 | Tokendo Soc Par Actions Simpli | Dispositif de metrologie par pointage laser pour sonde videoendoscopique |
| JP4674093B2 (ja) * | 2004-06-01 | 2011-04-20 | オリンパス株式会社 | 内視鏡装置及びプログラム |
| JP2006180934A (ja) * | 2004-12-24 | 2006-07-13 | Olympus Corp | 内視鏡装置 |
| JP4868211B2 (ja) | 2004-12-27 | 2012-02-01 | オリンパス株式会社 | 内視鏡装置 |
| US20060176321A1 (en) * | 2005-02-07 | 2006-08-10 | Olympus Corporation | Endoscope apparatus |
| US20060178561A1 (en) * | 2005-02-07 | 2006-08-10 | Olympus Corporation | Endoscope apparatus |
| JP5113990B2 (ja) * | 2005-05-24 | 2013-01-09 | オリンパス株式会社 | 計測用内視鏡装置 |
| US7443488B2 (en) | 2005-05-24 | 2008-10-28 | Olympus Corporation | Endoscope apparatus, method of operating the endoscope apparatus, and program to be executed to implement the method |
| JP4804062B2 (ja) * | 2005-07-29 | 2011-10-26 | オリンパス株式会社 | 内視鏡システム |
| JP5101089B2 (ja) * | 2005-11-22 | 2012-12-19 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP4975417B2 (ja) * | 2005-11-22 | 2012-07-11 | オリンパス株式会社 | 内視鏡装置及び内視鏡画像歪み補正方法 |
| JP4864528B2 (ja) * | 2006-04-27 | 2012-02-01 | Hoya株式会社 | 内視鏡装置 |
| US8372002B2 (en) * | 2006-07-27 | 2013-02-12 | Olympus Corporation | Endoscope apparatus |
| JP2008049149A (ja) * | 2006-07-27 | 2008-03-06 | Olympus Corp | 内視鏡装置 |
| US8052598B2 (en) * | 2006-10-12 | 2011-11-08 | General Electric Company | Systems and methods for calibrating an endoscope |
| US8556807B2 (en) | 2006-12-21 | 2013-10-15 | Intuitive Surgical Operations, Inc. | Hermetically sealed distal sensor endoscope |
| US8814779B2 (en) * | 2006-12-21 | 2014-08-26 | Intuitive Surgical Operations, Inc. | Stereoscopic endoscope |
| US8237808B2 (en) * | 2007-01-17 | 2012-08-07 | Sony Corporation | Solid state imaging device and imaging apparatus adjusting the spatial positions of pixels after addition by controlling the ratio of weight values during addition |
| JP5127302B2 (ja) * | 2007-05-29 | 2013-01-23 | オリンパス株式会社 | 計測用内視鏡装置およびプログラム |
| JP5295526B2 (ja) * | 2007-01-31 | 2013-09-18 | オリンパス株式会社 | 計測用内視鏡装置 |
| JP2008237235A (ja) * | 2007-03-23 | 2008-10-09 | Olympus Medical Systems Corp | 内視鏡及び生体観察システム |
| DE102008018930A1 (de) * | 2007-04-17 | 2008-11-20 | C2Cure Inc., Wilmington | Bildgebende Systeme und Verfahren, insbesondere zur Verwendung mit einem bei offener Chirurgie verwendeten Instrument |
| JP5214185B2 (ja) * | 2007-07-09 | 2013-06-19 | オリンパス株式会社 | 画像計測装置および方法 |
| JP5242138B2 (ja) * | 2007-11-26 | 2013-07-24 | オリンパス株式会社 | 側視用アタッチメント及び内視鏡装置 |
| JP5153381B2 (ja) * | 2008-02-21 | 2013-02-27 | オリンパス株式会社 | 内視鏡装置 |
| US8979743B2 (en) | 2008-07-07 | 2015-03-17 | Olympus Corporation | Endoscope device and endoscopic image distortion correction method |
| JP5253109B2 (ja) * | 2008-11-25 | 2013-07-31 | オリンパス株式会社 | 内視鏡装置および内視鏡画像用プログラム |
| ITBO20080729A1 (it) * | 2008-12-03 | 2010-06-04 | Xilostudios Di Xilo Maria Cristina & C S A S | Sistema medicale per visualizzare l'interno di un corpo. |
| JP5384957B2 (ja) * | 2009-01-21 | 2014-01-08 | オリンパス株式会社 | 内視鏡装置およびプログラム |
| JP5300522B2 (ja) * | 2009-02-18 | 2013-09-25 | 国立大学法人鳥取大学 | 三次元顕微鏡装置及び同装置を用いた観察・測定法 |
| US8965103B2 (en) | 2009-07-16 | 2015-02-24 | Olympus Corporation | Image processing apparatus and image processing method |
| US8675950B2 (en) | 2009-07-31 | 2014-03-18 | Olympus Corporation | Image processing apparatus and image processing method |
| US8791998B2 (en) | 2009-07-31 | 2014-07-29 | Olympus Corporation | Image processing apparatus and method for displaying images |
| JP5412215B2 (ja) * | 2009-09-04 | 2014-02-12 | オリンパス株式会社 | 画像処理装置およびプログラム |
| JP5437087B2 (ja) * | 2010-01-15 | 2014-03-12 | オリンパス株式会社 | 内視鏡装置およびプログラム |
| JP5414637B2 (ja) * | 2010-08-24 | 2014-02-12 | 富士フイルム株式会社 | 撮像装置および内視鏡システム |
| US8764635B2 (en) | 2010-11-24 | 2014-07-01 | Olympus Corporation | Endoscope apparatus |
| US8903144B2 (en) | 2010-12-01 | 2014-12-02 | Olympus Corporation | Endoscope apparatus and method of measuring object |
| US20120209064A1 (en) * | 2011-02-14 | 2012-08-16 | Olympus Corporation | Endoscope apparatus and method of setting reference image of endoscope apparatus |
| DE102011114541A1 (de) * | 2011-09-30 | 2013-04-04 | Lufthansa Technik Ag | Endoskopiesystem und korrespondierendesVerfahren zur Untersuchung von Gasturbinen |
| US9113822B2 (en) | 2011-10-27 | 2015-08-25 | Covidien Lp | Collimated beam metrology systems for in-situ surgical applications |
| US9471057B2 (en) * | 2011-11-09 | 2016-10-18 | United Technologies Corporation | Method and system for position control based on automated defect detection feedback |
| US9561022B2 (en) | 2012-02-27 | 2017-02-07 | Covidien Lp | Device and method for optical image correction in metrology systems |
| JP5959331B2 (ja) * | 2012-06-15 | 2016-08-02 | オリンパス株式会社 | 内視鏡装置 |
| JP6150532B2 (ja) | 2013-01-22 | 2017-06-21 | オリンパス株式会社 | 計測装置およびプログラム |
| US9351643B2 (en) | 2013-03-12 | 2016-05-31 | Covidien Lp | Systems and methods for optical measurement for in-situ surgical applications |
| US9588332B2 (en) * | 2013-03-13 | 2017-03-07 | Olympus Corporation | Photography system |
| CN104814712A (zh) * | 2013-11-07 | 2015-08-05 | 南京三维视嘉科技发展有限公司 | 三维内窥镜及三维成像方法 |
| WO2015132778A1 (en) * | 2014-03-02 | 2015-09-11 | Avishay Sidlesky | Endoscopic measurement system and method |
| JP6045760B2 (ja) * | 2014-11-07 | 2016-12-14 | オリンパス株式会社 | 撮像システム |
| WO2016076400A1 (ja) | 2014-11-13 | 2016-05-19 | オリンパス株式会社 | 較正装置、較正方法、光学装置、撮影装置、投影装置、計測システムおよび計測方法 |
| JP6996901B2 (ja) * | 2017-08-17 | 2022-01-17 | ソニー・オリンパスメディカルソリューションズ株式会社 | 内視鏡システム |
| GB201803286D0 (en) | 2018-02-28 | 2018-04-11 | 3D Oscopy Ltd | Imaging system and method |
| CN117241718A (zh) * | 2021-04-30 | 2023-12-15 | 奥林巴斯医疗株式会社 | 内窥镜系统、内腔构造计算系统以及内腔构造信息的制作方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3512602A1 (de) * | 1985-04-06 | 1986-10-09 | Richard Wolf Gmbh, 7134 Knittlingen | Endoskop zur bestimmung von objektgroessen in hohlraeumen |
| JPH07122895B2 (ja) * | 1985-10-04 | 1995-12-25 | 株式会社日立製作所 | ステレオ画像処理方法 |
| US4895431A (en) * | 1986-11-13 | 1990-01-23 | Olympus Optical Co., Ltd. | Method of processing endoscopic images |
| US4873572A (en) * | 1987-02-27 | 1989-10-10 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| JP2685757B2 (ja) * | 1987-07-23 | 1997-12-03 | 株式会社東芝 | 立体視式内視鏡システム |
| US4935810A (en) * | 1988-10-26 | 1990-06-19 | Olympus Optical Co., Ltd. | Three-dimensional measuring apparatus |
| JPH0595900A (ja) * | 1991-04-11 | 1993-04-20 | Olympus Optical Co Ltd | 内視鏡画像処理装置 |
| US5313306A (en) * | 1991-05-13 | 1994-05-17 | Telerobotics International, Inc. | Omniview motionless camera endoscopy system |
| JP3347385B2 (ja) * | 1992-03-27 | 2002-11-20 | オリンパス光学工業株式会社 | 内視鏡画像処理装置 |
| US5469254A (en) * | 1992-04-06 | 1995-11-21 | Olympus Optical Co., Ltd. | Method and apparatus for measuring three-dimensional position of a pipe from image of the pipe in an endoscopic observation system |
| US5603687A (en) * | 1992-10-28 | 1997-02-18 | Oktas General Partnership | Asymmetric stereo-optic endoscope |
| US5588948A (en) * | 1993-02-17 | 1996-12-31 | Olympus Optical Co. Ltd. | Stereoscopic endoscope |
| JPH0829701A (ja) * | 1994-07-18 | 1996-02-02 | Olympus Optical Co Ltd | 立体視内視鏡システム |
| JP3461974B2 (ja) * | 1995-05-31 | 2003-10-27 | 株式会社町田製作所 | 内視鏡 |
| US5776050A (en) * | 1995-07-24 | 1998-07-07 | Medical Media Systems | Anatomical visualization system |
-
1997
- 1997-03-12 JP JP05811497A patent/JP3771988B2/ja not_active Expired - Lifetime
-
1998
- 1998-03-06 US US09/036,216 patent/US6063023A/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10248806A (ja) | 1998-09-22 |
| US6063023A (en) | 2000-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3771988B2 (ja) | 計測内視鏡装置 | |
| JP4873794B2 (ja) | 画像処理計測装置及び計測内視鏡装置 | |
| US7564626B2 (en) | Stereo-measurement borescope with 3-D viewing | |
| JP5530225B2 (ja) | 内視鏡装置およびプログラム | |
| JP5073564B2 (ja) | 計測用内視鏡装置およびプログラム | |
| JP5113990B2 (ja) | 計測用内視鏡装置 | |
| EP1709394A1 (en) | Transprojection of geometry data | |
| JP4373037B2 (ja) | 計測内視鏡装置 | |
| JP2004049638A (ja) | 内視鏡装置 | |
| US20090167847A1 (en) | Measuring endoscope apparatus and program | |
| JP5231173B2 (ja) | 計測用内視鏡装置およびプログラム | |
| US20220130105A1 (en) | Image display method, display control device, and recording medium | |
| JP2006329684A (ja) | 画像計測装置及び方法 | |
| JP5307407B2 (ja) | 内視鏡装置およびプログラム | |
| JP2020126208A (ja) | 3次元画像表示方法、3次元画像表示装置、およびプログラム | |
| JP4759184B2 (ja) | 計測内視鏡装置 | |
| US9113806B2 (en) | Endoscope apparatus for measuring a spatial characteristic | |
| JP7049220B2 (ja) | 画像取得装置および画像取得装置の作動方法 | |
| RU2011109181A (ru) | Ультразвуковая визуализация | |
| JP6081209B2 (ja) | 内視鏡装置およびプログラム | |
| CN110858397A (zh) | 测量装置、测量装置的工作方法以及存储介质 | |
| JP5976436B2 (ja) | 内視鏡装置およびプログラム | |
| JP4373038B2 (ja) | 計測用プログラム | |
| JP4975417B2 (ja) | 内視鏡装置及び内視鏡画像歪み補正方法 | |
| JP6400767B2 (ja) | 計測内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040311 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060213 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090217 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20180217 Year of fee payment: 12 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |