JP3765463B2 - 像安定化装置 - Google Patents
像安定化装置 Download PDFInfo
- Publication number
- JP3765463B2 JP3765463B2 JP25403699A JP25403699A JP3765463B2 JP 3765463 B2 JP3765463 B2 JP 3765463B2 JP 25403699 A JP25403699 A JP 25403699A JP 25403699 A JP25403699 A JP 25403699A JP 3765463 B2 JP3765463 B2 JP 3765463B2
- Authority
- JP
- Japan
- Prior art keywords
- gimbal
- rotation
- case
- image stabilization
- gimbal suspension
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
- G03B2205/0023—Movement of one or more optical elements for control of motion blur by tilting or inclining one or more optical elements with respect to the optical axis
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0084—Driving means for the movement of one or more optical element using other types of actuators
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Telescopes (AREA)
- Adjustment Of Camera Lenses (AREA)
- Accessories Of Cameras (AREA)
Description
【発明の属する技術分野】
本発明は、単眼鏡、双眼鏡さらにはビデオカメラ等の光学装置が振動を受けた場合に、これら光学装置の光軸に対する観察物体からの光束の射出角度が変動し、光学像がブレて観察されるのを防止する、この光学装置内に配される像安定化装置に関するものである。
【0002】
【従来の技術】
単眼鏡、双眼鏡等の光学的な観測を目的とした光学装置を手で保持して操作する場合、特に光学装置を航空機や車輌等に持ち込んで使用する場合には、航空機、車輌等の振動や揺動が光学装置に伝わり、光軸に対する、観察物体からの光束の射出角度が変動し、観察される光学像を劣化させることが多い。このような光学装置に伝わる振動は、その振幅がたとえ小さくとも、単眼鏡や双眼鏡等においては視界が狭いことと観察物体を拡大して観察しているために、光軸に対する変動角度も拡大される。それ故に、比較的角度変動速度の小さい揺動時であっても、観察物体が視界の中で急速に移動したり、変動角度が大きい場合には視界から外れてしまったりする不都合が生じる。また、比較的角度変動速度の大きい揺動時には、比較的変動角度が小さくても光学装置の倍率分だけ観察物体の像の角度変動速度が大きくなって観察されるので、像のぶれとなって像の劣化となる不都合が生じる。
【0003】
これまでにも、光学装置に伝わる振動や揺動によって光軸に対する光束の射出角度が変動し観察される像が劣化することを防止するための像安定化のための装置が種々提案されている。
【0004】
例えば特公昭57-37852号公報には双眼鏡における観察像のブレを補正するためこの双眼鏡内に、回転慣性体(ジャイロモータ)を利用した防振手段を設けたものが開示されている。
【0005】
すなわち、この技術は双眼鏡の対物レンズと接眼レンズの間の光軸上に正立プリズムを配し、この正立プリズムを、回転慣性体が取り付けられたジンバル懸架手段上に固設し、双眼鏡が手ブレ等により振動しても正立プリズムを略同一姿勢に保持して双眼鏡の観察像のブレを防止するようにしたものである。
【0006】
このような、回転慣性体とジンバル懸架手段を利用した従来技術は高精度で像安定化が図れる一方、小さなスペースで大きな慣性力を得るため高速の回転体が必要であり、また回転体自身の発生する振動を小さくする必要があることから高精度である必要がある。この小型、高速、高精度の要求に対しての問題点は、価格や寿命、さらには電源投入から必要な慣性力を得るまでの時間等が不利となることである。また、双眼鏡の倍率や解像力を上げるのに伴なって対物レンズの有効径を大きくすると正立プリズムが大型化し、これに伴い大きな慣性力が必要となって上記の問題が一層大きくなることの他に、消費電力もこれに伴って大きくなる。
【0007】
そこで、本願出願人は、上記回転慣性体に代えて角速度センサをジンバル懸架手段に搭載し、この角速度センサからの出力値に基づいてこのジンバル懸架手段の回動を制御して正立プリズムの姿勢を地球(慣性系)に対して固定する像安定化装置を提案している(特開平6-250100)。この装置によれば、基本的にジンバル懸架手段に保持された正立プリズムには慣性力があり、特に、振動速度が速い、振動周波数の高い振動に対しては、比較的振幅の大きな振動に対しての姿勢保持能力が高い。したがって、角速度センサからの出力に基づく回転位置の制御力も少なくて良い。しかし、バリアングルプリズムやレンズ駆動を行う他の像安定化装置は積極的な駆動部が必要であり、周波数の高い振動では大きな振幅を補正するためには、駆動部を高速で動かす必要があるため、大きな角度範囲で補正することが難しい。
【0008】
【発明が解決しようとする課題】
ところで、上記ジンバル懸架手段は、モータ等のアクチュエータにより光学装置の左右方向および上下方向に延びる2本の回動軸周りに回動するようになっている。そして、上記アクチュエータは、応答性に優れ、かつ電力の利用効率が良いPWM制御で駆動されるようになっている。しかしながら、このようにPWM制御で駆動するようにした場合には次のような問題がある。
【0009】
すなわち、PWM制御においてはコンデンサの充放電により駆動制御が行われるが、ジンバル懸架手段の角度位置が変化しなければ、コンデンサの充放電は行われないので、像安定化制御の開始直後あるいは無振動状態等のときはアクチュエータの駆動の方向性が定まらず、このためPWM制御の応答性を高めることができないという問題がある。
【0010】
本発明はこのような事情に鑑みなされたもので、像安定化のための制御の応答性を高めることができる像安定化装置を提供することを目的とするものである。
【0011】
【課題を解決するための手段】
本発明の第1の像安定化装置は、正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、
前記内ジンバルと前記外ジンバルとの間に設けられ、前記内ジンバルを前記外ジンバルに対して一方向に回動付勢する片寄せ付勢手段とを備えてなることを特徴とするものである。
【0012】
また、本発明の第2の像安定化装置は、正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、
前記外ジンバルと前記ケースとの間に設けられ、前記外ジンバルを前記ケースに対して一方向に回動付勢する片寄せ付勢手段とを備えてなることを特徴とするものである。
さらに、本発明の第3の像安定化装置は、正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、
前記内ジンバルと前記外ジンバルとの間に設けられ、前記内ジンバルを前記外ジンバルに対して一方向に回動付勢する第1の片寄せ付勢手段と、
前記外ジンバルと前記ケースとの間に設けられ、前記外ジンバルを前記ケースに対して一方向に回動付勢する第2の片寄せ付勢手段とを備えてなることを特徴とするものである。
【0013】
上述した各場合において、前記回動制御手段による回動の制御がPWM制御を用いて行われるようにすることが特に有効である。
また、回動制御手段による回動制御(すなわち像安定化制御)を行わないとき、内ジンバルおよび外ジンバル間の相対回動あるいは外ジンバルおよびケース間の相対回動を規制するケージング手段を備えた構成とすることが好ましい。
【0014】
上記各像安定化装置において、片寄せ付勢手段は、内ジンバルを外ジンバルに対してあるいは外ジンバルをケースに対して一方向に回動付勢することができるものであれば、特定の構成に限定されるものではなく、例えば、回動軸に取り付けられた捩りコイルバネ等が採用可能である。
【0015】
【発明の実施の形態】
以下、本発明の実施形態を図面を用いて説明する。
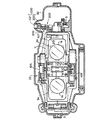
図2、3、4および5は、それぞれ本発明の実施形態に係る像安定化装置を双眼鏡に組み込んだ状態を示す平面断面図、正面断面図、側面断面図および斜視図である。図示されるように、本実施形態の像安定化装置20をケース30内に組み込んだ双眼鏡は1対の対物レンズ系1a,1b、1対の接眼レンズ系2a,2b、および1対の正立プリズム3a,3bを備えており、対物レンズ1a、接眼レンズ2a、正立プリズム3aは第1の望遠鏡系10a を構成し、対物レンズ1b、接眼レンズ2b、正立プリズム3bは同様に第2の望遠鏡系10b を構成し、この第1、第2の望遠鏡系10a ,10b 一対が双眼鏡系を構成している。
【0016】
この双眼鏡系を構成する一対の対物レンズ系1a,1bおよび接眼レンズ系2a,2bは本光学装置のケース30に固着されており、上記正立プリズム3a,3bは装置の上下方向(光軸の延びる方向および対物レンズ系1a,1bの配列方向に直交する方向)および装置の左右方向(対物レンズ系1a,1bの配列方向)に延びる回動軸6、106(図6参照)を有するジンバル懸架部材7、107を介して上記ケース30に回動自在に装着されている。
【0017】
また、ケース30の背面部には、メインスイッチ50、および後述する制御ループにおける利得の切替えを外部操作可能とする、利得切替指示用のスイッチ40が配設されている。
【0018】
以下、図6および図7を用いて本実施形態装置の前提となる基本機能について説明する。なお、本明細書中で、装置の上下方向とは図中矢印A方向を示し、装置の左右方向とは図中矢印C方向を示す。
【0019】
図6において上記正立プリズム3a,3bの装着されているジンバル懸架部材7、107がケース30に対して固定された状態、したがってジンバル懸架部材7、107に装着されている上記正立プリズム3a,3bがケース30に固定された状態では、本光学装置は通常の双眼鏡系の構成となるが、この時の各望遠鏡光学系10a ,10b の光軸4a,4bを本光学装置の光軸と称することとする。
【0020】
なお、上記対物レンズ系1a,1b、接眼レンズ系2a,2b、正立プリズム3a,3b、ジンバル懸架部材7、107および回動軸6、106等の適切な配設位置については公知文献(例えば特公昭57-37852号公報)に詳述されているので、ここでは省略する。
【0021】
図6に示すように、本実施形態装置では内側のジンバル懸架部材107 が外側のジンバル懸架部材7に軸支されており、ジンバル懸架装置が内外2重の構造となっている。外側のジンバル懸架部材7が装置の左右方向に延びる回動軸6により上下方向の像ブレを補正するように回動するのに対し、内側のジンバル懸架部材107 は装置の上下方向に延びる回動軸106 により左右方向の像ブレを補正するように回動する。正立プリズム3a,3bは、この内側のジンバル懸架部材107 に装着されている。なお、この図6においては、上下の関係が図2〜5のものとは逆となるようにして示されている。
【0022】
また、外側のジンバル懸架部材7 の上側壁部の中央部分には角速度センサ8が固設されており、一方、 内側のジンバル懸架部材107 の前側壁部の中央部分には角速度センサ108が固設されている。角速度センサ8が、ケース30の上下方向のブレに伴なって外側のジンバル懸架部材7が矢印B方向に回動した場合に、この回転角速度ω1 を検出するセンサであるのに対し、角速度センサ108 は、ケース30の左右方向のブレに伴なって内側のジンバル懸架部材107 が矢印D方向に回動した場合に、この回転角速度ω2 を検出するセンサである。
【0023】
また、上記回動軸6の一端には、上記検出角速度による速度フィードバック制御に加えて位置フィードバック制御を行なうため回動軸6の回転角度θ1 を検出するポジションセンサ9が取り付けられており、上記回動軸6の他端には、上記角速度センサ8および上記ポジションセンサ9からの検出値に基づき、正立プリズム3a,3bをケース30のブレに対し常に初期の姿勢に戻すようにジンバル懸架部材7の回動軸6を回動せしめる回転駆動モータ5が取り付けられている。一方、上記回動軸106 の一端には、上記検出角速度による速度フィードバック制御に加えて位置フィードバック制御を行なうため回動軸106 の回転角度θ2 を検出するポジションセンサ109 が取り付けられており、上記回動軸106 の他端には、上記角速度センサ108および上記ポジションセンサ109からの検出値に基づき、正立プリズム3a,3bをケース30の左右方向のブレに対し常に初期の姿勢に戻すように内側のジンバル懸架部材107 の回動軸106 を回動せしめる回転駆動モータ105 が取り付けられている。
【0024】
図2および3に示すように、ケース30におけるジンバル懸架部材7,107の一端部には、後述する像安定化制御が行われないとき、ジンバル懸架部材7,107の回動を規制してその破損防止を図るためのケージング手段200 が設けられている。
【0025】
このケージング手段200 は、両ジンバル懸架部材7,107を同時に挟んでその回動を規制する1対の押さえレバー213 を備えた回動規制機構210 と、該回動規制機構210 に連結された押圧部材220 とからなっている。この押圧部材220 は、ケース30の上方外部に突出するボタン221 と、該ボタン221 を支持して下方に延びる押圧片222 とからなっている。ケース30は、ボタン221 の押圧操作を行いやすくするため、押圧部材220 の周辺部が上方へ膨出形成されるとともに、その頂部のボタン221 近傍部位が凹陥状に形成されている。
【0026】
そして、このケージング手段200 においては、ボタン221 が押圧されることにより像安定化制御を開始させるとともに回動規制機構210 による回動規制を解除し、一方、ボタン221 を再度押圧することにより像安定化制御を終了させるとともに回動規制機構210 による回動規制を行うようになっている。
【0027】
図9および10に示すように、ジンバル懸架部材107(内ジンバル)とジンバル懸架部材7(外ジンバル)との間には、捩りコイルバネ240が設けられている。この捩りコイルバネ240は回動軸106に巻き付けられるようにして設けられ、その両端部が両ジンバル懸架部材7,107に係止されている。そして、この捩りコイルバネ240の弾性力により、ジンバル懸架部材107をジンバル懸架部材7に対して一方向に回動付勢するようになっている。この捩りコイルバネ240は、像安定化制御の際におけるジンバル懸架部材107の最大回動角度(全幅で約10°)範囲内で回動付勢力がジンバル懸架部材107に作用するように取り付けられている。ただし、像安定化制御の際に回転駆動モータ105に余分な負荷がかかってしまわないようにするため、この捩りコイルバネ240のバネ定数は十分小さい値に設定されている。
【0028】
なお、ジンバル懸架部材7(外ジンバル)とケース30との間にも、捩りコイルバネ240と同様の捩りコイルバネ(図示せず)が設けられており、この捩りコイルバネの弾性力によりジンバル懸架部材7をケース30に対して一方向に回動付勢するようになっている。
【0029】
次に、本実施形態装置の制御ループの基本的概念を図7により説明する。
図示するように、この装置は角速度センサ8からの角速度信号およびポジションセンサ9からの角度信号を各々増巾する増幅器11a ,11b と、これらの角速度信号および角度信号に基づき、正立プリズム3a,3bを元の姿勢に戻すように回転駆動モータ5の駆動量を演算し、この演算に基づく制御信号を出力するCPU12と、このCPU12からの制御信号を増巾して回転駆動モータ5を駆動するモータ駆動回路13を備えている。このCPU12による回転駆動モータ5の駆動制御は、応答性に優れ、かつ電力の利用効率が良いPWM(Pulse Width Modulation)制御で行われるようになっている。
【0030】
CPU12には、各種プログラムが格納されたROM12a、および該CPU12にこの制御ループの利得の切替を指示する利得切替指示スイッチ40が接続されている。一方、角速度センサ108 およびポジションセンサ109 からの検出信号は、上記角速度センサ8および上記ポジションセンサ9からの検出信号と同様に、図7に示す制御ループと同様の制御ループによって制御信号に変換され、この制御信号により回転駆動モータ105 が駆動される。
【0031】
したがって本実施形態装置では、外側と内側の2つのジンバル懸架部材7,107を各々元の姿勢に戻すために2組の制御ループが必要となるがCPU12は共通のものを用いればよい。
【0032】
次に、図1を用いて上記制御ループの詳細な構成について説明する。
なお、この制御ループは速度(角速度)フィードバックループと位置(角度)フィードバックループの2重の帰還ループから構成されており、また、この制御ループはCPU12のマイコンプログラムによるソフト的なループとハード的なループの組合せにより構成されている。
【0033】
まず、速度フィードバックループはジンバル懸架装置70(7,107)の回動軸6,106 周りの角速度ωを角速度センサ61(8,108 )により検出し、この検出値をハード的な増幅器62 により増幅した後、減算器66および増幅器67を介して上記検出値ωをモータ駆動系68に負帰還させる(第1の速度フィードバックループ)。これによりモータ69 に逆向きの回転トルクを発生させ、手ブレ等の振動に抗してジンバル懸架装置70 を元の姿勢に戻すように、すなわち角速度の大きい振動に対しては上記正立プリズム3a,3bが地球(慣性系)に対して固定されるような制御がなされることになる。
【0034】
また、この速度フィードバックループでは角速度センサ61により検出された検出値を減算器63および増幅器64を介して積分器65に入力せしめ、この後積分器65からの出力値を減算器66において上記増幅器62から直接入力された検出値を減算し、その減算結果をこのモータ駆動系68に負帰還させている(第2の速度フィードバックループ)。このように角速度センサ61による検出値を積分器65を介して負帰還させることで速度指令に対して定常偏差が0の場合でも、すなわちフィードバックループの速度入力値と速度出力値が等しい場合でも制御系を機能させることができ、これとともにループゲインを2重にできるためジンバル懸架装置70の高速安定化を図る(スタビ精度を上げる)ことができる。
【0035】
なお、上記積分器65は入力値を平均化する機能を有し、その出力値が減算器66において検出角速度値との間で減算されるため、上記第1の速度フィードバックループの発振を防止するダンパ的機能を有しているともいえる。
【0036】
一方、上記位置フィードバックループはジンバル懸架装置70 の回動軸6,106 周りの角度位置θをポジションセンサ81(9,109 )により検出し、この検出値をハード的な増幅器82 により増幅した後モータ駆動系68 に戻すことにより、回転駆動モータ69 (5,105 )がジンバル懸架装置70を視軸中点の角度位置θ0に近づけるように制御するものである。
【0037】
なお、双眼鏡等の光学装置においては、大きくパンニングあるいはチルティングを行う場合があり、このような場合に上記速度フィードバックループのみを用いた制御であると、パンニングあるいはチルティングに対する応答性が悪く、また、そのためにジンバル懸架装置70 が大きく回動してケース30 の可動限界端部に衝突してしまうおそれがある。
【0038】
そこで、この位置フィードバックループでは、ジンバル懸架装置70 が大きく回動したことが検出された場合、その検出値に応じた信号をモータ駆動系68 に戻すようにして、ジンバル懸架装置70 を視軸中点方向に強力に戻すようモータ69 を駆動させる。
【0039】
これにより、パンニングあるいはチルティング時等において、ジンバル懸架装置70 がケース30 の可動限界端部に衝突する不測の事態を防止するとともに、パンニングあるいはチルティングを行う場合に、その追従性を良好なものとしている。
【0040】
ところで、実際に双眼鏡を使用する際には、鳥や飛行機等の飛行物体を追従しながら観察することも多く、このような場合には素早いパン/チルト操作、特に素早いパンニングが要求される。このようなパンニングの操作では装置内の光学系が観察物体の移動方向にスムーズに追従していくことが必要となるから、振動に抗して光学系を元の位置に固定しようとする上記防振機能とは相反する機能が必要とされ、このようなパン/チルト操作を行う場合には、むしろ上記防振機能を無効状態とする必要がある。そして、このようなパン/チルト操作は観察者の必要に応じて随時行われるものであるから、観察者の操作によって例えばパンニングモードと防振モードの切替えが行われることが望ましい。
【0041】
そこで本実施例装置では、前述したようにケース30の背面部にモード切替スイッチ86(利得切替指示用のスイッチ40)を配設し、このスイッチ86(40)の切替えに応じて上述した制御ループの利得を変化せしめ、上記制御ループの利得が小となる防振モードと上記制御ループの利得が大となるパンニングモードのモード切替えが可能となるようにしている。
【0042】
すなわち、上記速度フィードバックループは、防振機能を主目的としたものであり、一方上記位置フィードバックループはケース30 に対する追従機能であるパン/チルト機能を主目的としたものである。
【0043】
したがって、位置フィードバックループの帰還割合を相対的に大とすれば、パン/チルト機能を主とした系となり、一方、位置フィードバックループの帰還割合を相対的に小とすれば防振機能を主とした系となる。
【0044】
そこで、上記実施形態のものでは、図1に示す如く、増幅率が小さい第1増幅器83と増幅率が大きい第2増幅器84を位置フィードバックループ内に配設し、前述したモード切換スイッチ86の操作者による切換操作に応じ、ポジションセンサ81からの検出信号が第1増幅器83を介して帰還される低利得モードと、該検出信号が第2増幅器84を介して帰還される高利得モードの切り換えがなされるようにしている。なお、制御ループ内における該モードの切り替えは、操作者によるモード切換スイッチ86の切換操作に応じたモード切換信号に基づいてループ接続の切り替えを行うソフトスイッチ部85 によりなされる。
【0045】
すなわち、ソフトスイッチ部85 が第1増幅器83 に接続されると、減算器63 に入力される位置フィードバックループからの値は小さくなり、相対的に速度フィードバックループからの入力値が大となって防振モード(低利得モード)となり、手ブレ等の振動に抗し、ジンバル懸架装置70 を地球(慣性系)に対して良好に固定することができるようになる。
【0046】
一方、ソフトスイッチ部85 が第2増幅器84 に接続されると、減算器63 に入力される位置フィードバックループからの値は大きくなり、相対的に速度フィードバックループからの入力値が小となってパン/チルトモード(高利得モード)となり、パンニングあるいはチルティングに対する追従性が良好となる。
【0047】
上述したように、本実施形態においては、CPU12による回転駆動モータ5,105の駆動制御がPWM制御で行われるようになっている。このPWM制御においてはコンデンサの充放電により駆動制御が行われるが、ジンバル懸架手段7,107の角度位置が変化しなければコンデンサの充放電は行われないので、一般に像安定化制御の開始直後は回転駆動モータ5,105の駆動の方向性が定まらず、このためPWM制御の応答性を高めることができない。
【0048】
この点、本実施形態においては、ジンバル懸架部材107とジンバル懸架部材7との間に、ジンバル懸架部材107をジンバル懸架部材7に対して一方向に回動付勢する片寄せ付勢手段として捩りコイルバネ240が設けられており、ジンバル懸架部材7とケース30との間にも同様の捩りコイルバネが設けられているので、像安定化制御が開始されると、捩りコイルバネ240等の弾性付勢力によりジンバル懸架手段7,107の角度位置が即座に変化してコンデンサの充電が早期に行われ、これによりPWM制御の応答性が高められる。
【0049】
しかも、本実施形態においては、像安定化制御が行われないとき、ケージング手段200 により両ジンバル懸架部材7,107の回動を規制するようになっているので、像安定化制御の際におけるジンバル懸架部材107の回動角度範囲内で回動付勢力がジンバル懸架部材107に作用するように捩りコイルバネ240等を取り付ければ足りるので、捩りコイルバネ240等のバネ定数を十分小さい値に設定することができ、これにより像安定化制御の際に回転駆動モータ105に余分な負荷がかかってしまうのを防止することができる。
【0050】
本実施形態においては、回動軸6,106に取り付けられた捩りコイルバネ240により片寄せ付勢手段が構成されているが、これ以外の片寄せ付勢手段を用いることももちろん可能である。
例えば、図11に示すように、捩りコイルバネ240に代えて引張コイルバネ242を採用することが可能である。
【0051】
同図(a)に示す片寄せ付勢手段は、ジンバル懸架部材107の一端部にタブ107aを形成して該タブ107aにピン107bを立設するとともにジンバル懸架部材7の一端部にピン7aを立設し、両ピン7a,107aの間に引張コイルバネ242を架け渡すことにより、ジンバル懸架部材107をジンバル懸架部材7に対して一方向に回動付勢するように構成したものである。
【0052】
また、同図(b)に示す片寄せ付勢手段は、ジンバル懸架部材107の一端部にL字形のピン107cを立設するとともにジンバル懸架部材7の一端部にピン7aを立設し、両ピン7a,107cの間に引張コイルバネ242を架け渡すことにより、ジンバル懸架部材107をジンバル懸架部材7に対して一方向に回動付勢するように構成したものである。
【0053】
なお、本実施形態において、前述の正立プリズム3a,3bとしてはシュミット(Schmidt)の正立プリズム、アツベ(Abbe)の正立プリズム、バウエルン フエント(bauern fend)の正立プリズム、ポロの正立プリズムおよびダハの正立プリズム等があるが、このうち図8にはシュミットの正立プリズムを示す。シュミットの正立プリズムは図に示すようにプリズム23とプリズム24から構成されており、プリズム24の一部25がダハ反射面となっている。このような正立プリズムでは図示するように入射光軸21と射出光軸22を同一直線上にとることのできる入射光軸の位置が存在する。このような入射光軸21と射出光軸22を同一直線上にとることのできる正立プリズムにおいては、図8に示す如く、光軸21より上側にhだけ離れた、該光軸21に平行な光線21′は、上記正立プリズムを通った後は射出光軸22より下側にhだけ離れた、光軸22に平行な光線22′になるという性質を持っている。なお、正立プリズムであれば、入射光軸と射出光軸が同一直線上となるものに限らず他のプリズムも使用可能である。
【0054】
また、上記角速度センサ8、108は、円柱状等の柱状振動子と複数個の圧電セラミックからなる、コリオリの力を利用した圧電振動ジャイロセンサであって、柱状振動子の側面に少なくとも2個の検出用圧電セラミックと少なくとも1個の帰還用圧電セラミックを設けてなる。
【0055】
各検出用圧電セラミック からは振動に応じて値の異なる検出信号が出力され、これらの差分を演算することにより角速度を得る。
なお、帰還用圧電セラミックは検出信号の位相補正用に使用される。
この角速度センサ8、108は構造が簡単で超小型であることから像安定化装置20自体を構造簡単かつ小型とすることができる。また、高S/N比で高精度であるから角速度制御を高精度とすることができる。
【0056】
なお、本発明の像安定化装置としては上記実施形態のものに限られるものではなく、その他種々の態様の変更が可能であり、例えば、角速度情報検出手段としては、円柱状振動子タイプの圧電振動ジャイロセンサの他、三角柱振動子タイプ、四角柱振動子タイプや音叉状振動子タイプ等の種々のタイプの振動子を用いた圧電振動ジャイロセンサを使用することが可能であり、さらに、その他の種々の角速度センサを使用することが可能である。
【0057】
また、上記実施形態においては回転駆動モータの駆動制御がPWM制御で行われるようになっているが、本発明はオペアンプを用いた回転駆動モータの駆動制御にも適用することが可能である。
なお、角度位置情報検出手段としては、上記ポジションセンサに代えてレゾルバ、シンクロ、ロータリエンコーダ等の種々の角度センサを用いることができる。
【0058】
また、上記実施形態装置は双眼鏡に適用するための構成とされているが、本発明の像安定化装置としては単眼鏡に適用し得る構成とすることも可能である。また、ビデオカメラ等のカメラに搭載しても同様の効果を得ることができる。
【0059】
【発明の効果】
本発明の第1の像安定化装置によれば、ジンバル懸架手段を2本の回動軸の周りに回動せしめるアクチュエータを駆動して、正立プリズムを慣性系に対して固定するようになっているが、ジンバル懸架手段を構成する内ジンバルと外ジンバルとの間には、内ジンバルを外ジンバルに対して一方向に回動付勢する片寄せ付勢手段が設けられているので、像安定化制御が開始されると片寄せ付勢手段の付勢力により内ジンバルの角度位置が即座に変化してコンデンサの充電が行われ、これにより駆動モータの制御の応答性が高められる。
【0060】
本発明の第2の像安定化装置によれば、ジンバル懸架手段を2本の回動軸の周りに回動せしめるアクチュエータを駆動して、正立プリズムを慣性系に対して固定するようになっているが、ジンバル懸架手段の外ジンバルとケースの間には、外ジンバルをケースに対して一方向に回動付勢する片寄せ付勢手段が設けられているので、像安定化制御が開始されると片寄せ付勢手段の付勢力により外ジンバルの角度位置が即座に変化してコンデンサの充電が行われ、これにより駆動モータの応答性が高められる。
【0061】
なお、上記実施形態のように上記第1および第2の像安定化装置を兼ね備えた構成とすることが、より好ましい。
【図面の簡単な説明】
【図1】本発明の実施形態に係る像安定化装置の制御ループを示すブロック線図
【図2】本発明の実施形態に係る像安定化装置を内蔵した双眼鏡を示す平面断面図
【図3】本発明の実施形態に係る像安定化装置を内蔵した双眼鏡を示す正面断面図
【図4】本発明の実施形態に係る像安定化装置を内蔵した双眼鏡を示す側面断面図
【図5】本発明の実施形態に係る像安定化装置を内蔵した双眼鏡を示す斜視図
【図6】本発明の実施形態に係る像安定化装置の機能を説明するための装置概略斜視図
【図7】本発明の実施形態に係る像安定化装置の機能を説明するためのブロック図
【図8】図2に示す正立プリズムを説明するための側面図
【図9】本発明の実施形態に係る像安定化装置を内蔵した双眼鏡の要部を示す斜視図
【図10】図9の側断面図
【図11】本発明の実施形態の変形例を示す要部斜視図
【符号の説明】
1a,1b 対物レンズ(対物レンズ系)
2a,2b 接眼レンズ(接眼レンズ系)
3a,3b 正立プリズム
4a,4b 光軸
5,105 回転駆動モータ
6,106 回動軸
7 ジンバル懸架部材(外ジンバル)
7a ピン
8,61,108 角速度センサ
9,81,109 ポジションセンサ
10a ,10b 望遠鏡光学系
12 CPU
12a ROM
30 ケース
40 利得切替指示スイッチ
68 モータ駆動系
70 ジンバル懸架装置
83 第1増幅器
84 第2増幅器
85 ソフトスイッチ部
86 モード切替スイッチ
107 ジンバル懸架部材(内ジンバル)
107a タブ
107b,107c ピン
200 ケージング手段
213 押さえレバー
210 回動規制機構
220 押圧部材
221 ボタン
222 押圧片
240 捩りコイルバネ(片寄せ付勢手段)
242 引張コイルバネ(片寄せ付勢手段)
Claims (8)
- 正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、
前記内ジンバルと前記外ジンバルとの間に設けられ、前記内ジンバルを前記外ジンバルに対して一方向に回動付勢する片寄せ付勢手段とを備えてなることを特徴とする像安定化装置。 - 正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、前記外ジンバルと前記ケースとの間に設けられ、前記外ジンバルを前記ケースに対して一方向に回動付勢する片寄せ付勢手段とを備えてなることを特徴とする像安定化装置。 - 正立プリズムを対物レンズと接眼レンズの間に配置した単眼鏡光学系もしくは双眼鏡光学系を有し、これら光学系の対物レンズおよび接眼レンズをケース内に固設してなる光学装置に搭載される像安定化装置であって、
前記光学装置の左右方向および上下方向に延びる2本の回動軸を有し、前記正立プリズムを前記ケースに回動自在に装着する、内ジンバルおよび外ジンバルからなるジンバル懸架手段と、
該ジンバル懸架手段を該2本の回動軸の周りに回動せしめるアクチュエータと、
前記正立プリズムを慣性系に対して固定するよう前記アクチュエータを駆動し、前記ジンバル懸架手段の2つの回動軸周りの回動を制御する回動制御手段と、
前記内ジンバルと前記外ジンバルとの間に設けられ、前記内ジンバルを前記外ジンバルに対して一方向に回動付勢する第1の片寄せ付勢手段と、
前記外ジンバルと前記ケースとの間に設けられ、前記外ジンバルを前記ケースに対して一方向に回動付勢する第2の片寄せ付勢手段とを備えてなることを特徴とする像安定化装置。 - 前記回動制御手段による回動の制御はPWM制御を用いて行われることを特徴とする請求項1〜3のうちいずれか1項記載の像安定化装置。
- 前記回動制御手段による回動制御が行われないとき、前記内ジンバルおよび前記外ジンバル間の相対回動を規制するケージング手段を備えてなることを特徴とする請求項1記載の像安定化装置。
- 前記回動制御手段による回動制御が行われないとき、前記外ジンバルおよび前記ケース間の相対回動を規制するケージング手段を備えてなることを特徴とする請求項2記載の像安定化装置。
- 前記回動制御手段による回動制御が行われないとき、前記内ジンバルおよび前記外ジンバル間の相対回動を規制する第1のケージング手段を備えるとともに、
前記回動制御手段による回動制御が行われないとき、前記外ジンバルおよび前記ケース間の相対回動を規制する第2のケージング手段を備えてなることを特徴とする請求項3記載の像安定化装置。 - 前記片寄せ付勢手段が、前記回動軸に取り付けられた捩りコイルバネからなることを特徴とする請求項1〜7のうちいずれか1項記載の像安定化装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25403699A JP3765463B2 (ja) | 1999-09-08 | 1999-09-08 | 像安定化装置 |
| US09/657,182 US6369946B1 (en) | 1999-09-08 | 2000-09-07 | Image stabilizing apparatus |
| DE1083455T DE1083455T1 (de) | 1999-09-08 | 2000-09-08 | Bildstabilisierungsvorrichtung |
| EP00119664A EP1083455B1 (en) | 1999-09-08 | 2000-09-08 | Image stabilizing apparatus |
| DE60038927T DE60038927D1 (de) | 1999-09-08 | 2000-09-08 | Bildstabilisierungsvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25403699A JP3765463B2 (ja) | 1999-09-08 | 1999-09-08 | 像安定化装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001075014A JP2001075014A (ja) | 2001-03-23 |
| JP2001075014A5 JP2001075014A5 (ja) | 2004-08-26 |
| JP3765463B2 true JP3765463B2 (ja) | 2006-04-12 |
Family
ID=17259358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP25403699A Expired - Lifetime JP3765463B2 (ja) | 1999-09-08 | 1999-09-08 | 像安定化装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6369946B1 (ja) |
| EP (1) | EP1083455B1 (ja) |
| JP (1) | JP3765463B2 (ja) |
| DE (2) | DE1083455T1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008026978A1 (de) * | 2008-05-29 | 2009-12-03 | Carl Zeiss Ag | Fernrohr |
| US8698952B2 (en) * | 2011-10-31 | 2014-04-15 | Lg Innotek Co., Ltd. | Camera module |
| DE102012000857B4 (de) * | 2012-01-13 | 2021-08-05 | Carl Zeiss Ag | Fernoptische Vorrichtung mit Bildstabilisierung |
| CN110286483B (zh) * | 2018-12-27 | 2024-04-02 | 刘云坤 | 一种测距双筒望远镜光学系统 |
| CN213581563U (zh) * | 2020-06-30 | 2021-06-29 | 诚瑞光学(常州)股份有限公司 | 光学装置及电子设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3006197A (en) * | 1960-01-18 | 1961-10-31 | Kenyon Lab Inc | Stabilizing instrument |
| GB1351908A (en) * | 1972-05-25 | 1974-05-15 | Dynasciences Corp | Optical systems including mechanism for compensating for random angular motion |
| US3941001A (en) * | 1973-11-09 | 1976-03-02 | Lear Siegler, Inc. | Gimbal control mechanism |
| JPS5423554A (en) * | 1977-07-22 | 1979-02-22 | Fuji Photo Optical Co Ltd | Image stabilizing optical device |
| JPS5843907B2 (ja) | 1980-08-20 | 1983-09-29 | 株式会社日立製作所 | 半導体集積回路およびその回路プログラム方法 |
| US4316649A (en) * | 1979-11-26 | 1982-02-23 | Schwem Instruments | Stabilized zoom binocular |
| US4655548A (en) * | 1984-10-22 | 1987-04-07 | Grumman Aerospace Corporation | Multi-degree of freedom mount |
| DE4220279C1 (de) * | 1992-06-20 | 1993-11-25 | Bodenseewerk Geraetetech | Bandgehängter Meridiankreisel |
| JP3041152B2 (ja) | 1993-02-24 | 2000-05-15 | 富士写真光機株式会社 | 像安定化装置 |
| JP3441898B2 (ja) | 1996-09-30 | 2003-09-02 | 富士写真光機株式会社 | 像安定化装置 |
| JP3417446B2 (ja) | 1996-10-01 | 2003-06-16 | 富士写真光機株式会社 | 像安定化装置 |
| US5850576A (en) * | 1996-11-14 | 1998-12-15 | Olympus Optical Co., Ltd. | Blur prevention system for optical apparatus |
| JP3533089B2 (ja) * | 1998-05-26 | 2004-05-31 | ペンタックス株式会社 | 像振れ補正機能を備えた光学機器 |
-
1999
- 1999-09-08 JP JP25403699A patent/JP3765463B2/ja not_active Expired - Lifetime
-
2000
- 2000-09-07 US US09/657,182 patent/US6369946B1/en not_active Expired - Lifetime
- 2000-09-08 DE DE1083455T patent/DE1083455T1/de active Pending
- 2000-09-08 EP EP00119664A patent/EP1083455B1/en not_active Expired - Lifetime
- 2000-09-08 DE DE60038927T patent/DE60038927D1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE60038927D1 (de) | 2008-07-03 |
| EP1083455B1 (en) | 2008-05-21 |
| US6369946B1 (en) | 2002-04-09 |
| EP1083455A3 (en) | 2004-01-02 |
| EP1083455A2 (en) | 2001-03-14 |
| DE1083455T1 (de) | 2001-09-20 |
| JP2001075014A (ja) | 2001-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6384976B1 (en) | Image stabilizing apparatus | |
| JP2007183356A (ja) | 防振装置 | |
| JP3041152B2 (ja) | 像安定化装置 | |
| JP3417446B2 (ja) | 像安定化装置 | |
| JP3417447B2 (ja) | 像安定化装置 | |
| JP3441898B2 (ja) | 像安定化装置 | |
| JP4144827B2 (ja) | 像安定化装置 | |
| JP3765463B2 (ja) | 像安定化装置 | |
| JP2004212878A (ja) | 像安定化装置およびこの像安定化装置を備えた双眼鏡 | |
| JP3900756B2 (ja) | 像安定化装置 | |
| JPH06250099A (ja) | 像安定化装置 | |
| JP2001100106A (ja) | 像安定化装置 | |
| JPH06250098A (ja) | 像安定化装置 | |
| JP4033431B2 (ja) | 像安定化装置 | |
| JP2556468B2 (ja) | 防振撮像装置 | |
| JP3451578B2 (ja) | 像安定化装置 | |
| JPH10104682A (ja) | 像安定化装置 | |
| JP3394666B2 (ja) | 像安定化装置 | |
| JP2023127091A (ja) | 像安定化装置 | |
| JPH10104683A (ja) | 像安定化装置 | |
| JPH10104674A (ja) | 像安定化装置 | |
| JPH07333664A (ja) | カメラ | |
| JPH10104675A (ja) | 像安定化装置 | |
| JPH03293872A (ja) | 撮影装置 | |
| JP2003222919A (ja) | 像安定化装置、像安定化装置を備えた双眼鏡および単眼鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060119 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3765463 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100203 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100203 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110203 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110203 Year of fee payment: 5 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110203 Year of fee payment: 5 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120203 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120203 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130203 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140203 Year of fee payment: 8 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |