JP3734065B2 - トラクタ - Google Patents
トラクタ Download PDFInfo
- Publication number
- JP3734065B2 JP3734065B2 JP17988897A JP17988897A JP3734065B2 JP 3734065 B2 JP3734065 B2 JP 3734065B2 JP 17988897 A JP17988897 A JP 17988897A JP 17988897 A JP17988897 A JP 17988897A JP 3734065 B2 JP3734065 B2 JP 3734065B2
- Authority
- JP
- Japan
- Prior art keywords
- accelerator
- engine
- machine
- sensor
- lever
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Landscapes
- Lifting Devices For Agricultural Implements (AREA)
Description
【発明の属する技術分野】
本発明は、トラクタに関する技術であり、特に農用トラクタにおけるアクセル設定器とハンドアクセルレバーとフートアクセルペダルの構成に関する。
【0002】
【従来の技術】
従来から、農用トラクタに関する技術は公知とされている。例えば、特公昭62−58684号公報等の如くである。
従来の農用トラクタは、エンジンの回転数を設定するアクセル設定器をエンジン側面に装着し、該アクセル設定器を操作するアクセルレバーをエアカットプレート後方に設けて、該アクセルレバー及びフートアクセルと、該アクセル設定器とを、ワイヤ又はリンクを介して連結していた。
【0003】
【発明が解決しようとする課題】
前記アクセル設定器は振動に弱いため、エンジン側面に装着していると故障する恐れがあり、また、アクセルレバーの操作が行いずらかった。
【0004】
【課題を解決するための手段】
本発明の解決しようとする課題は以上の如くであり、次に該課題を解決するための手段を説明する。
電子燃料噴射装置37を有するエンジンEと、該エンジンEの回転数を設定するアクセル設定器29と、該アクセル設定器29を動作させるハンドアクセルレバー27及びフートアクセルペダル28とを備えたトラクタにおいて、シートSの側方のレバーガイドLG部に該アクセル設定器29、及びアクセル設定器29を手動操作するハンドアクセルレバー27を配置し、シートSの前方のステップ31には、アクセル設定器29を足で操作するフートアクセルペダル28を配置し、前記ハンドアクセルレバー27は操作軸27aを中心に回動可能とし、該ハンドアクセルレバー27の前後回動により、該操作軸27aが 一体的に回動してアクセル設定器29を設定操作すべく構成し、また、操作軸27aから後方に操作アーム42を突出し、該操作アーム42にワイヤーガイド43を取付け、該ワイヤーガイド43とフートアクセルペダル28との間をワイヤ41で連結し、前記フートアクセルペダル28を踏圧すると、該ワイヤ41が該フートアクセルペダル28側に引かれて、操作アーム42が下方に回動し、該ワイヤ41の先端部がワイヤーガイド43に係止して操作アーム42を下方に回動し、逆に引いていたワイヤ41を緩めると、付勢力によって操作アーム42が上方に回動するようバネ44を介装し、前記操作アーム42の上下回動に伴い操作軸27aを回動し、アクセル設定器29を操作し、フートアクセルペダル28の操作によっても、ハンドアクセルレバー27と同様にアクセル設定器29の操作を可能としたものである。
【0005】
【発明の実施の形態】
次に、本発明の実施の形態を説明する。
図1はトラクタを示す全体側面図、図2は同じくトラクタを示す全体平面図、図3は同じくトラクタを示す全体後面図、図4は角度制御装置を示すブロック図、図5は角度制御装置のフローチャートの概略を示す図、図6は角速度センサのグレードと傾斜のグレードとのマップを示す図、図7は角速度センサ異常モードのフローチャートを示す図、図8は油圧リフトの上昇位置の範囲を示す側面図、図9はトラクタの別実施例を示す平面図、図10は同じく角度制御装置を示すブロック図、図11は本機平行制御ルーチンのフローチャートを示す図、図12はアクセル設定器の配置位置を示す平面図、図13はハンドアクセルレバーを示す側面図、図14はエンジン制御装置を示すブロック図、図15はエンジン制御のフローチャートを示す図、図16は各エンジン特性モードにおけるエンジン回転数と出力との関係を示す図、図17は各エンジン特性モードにおけるエンジン回転数とトルクとの関係を示す図である。
【0006】
まず、トラクタの全体構成について、図1乃至図3により説明する。
前後に前輪FW、後輪RWを懸架する本機の前部にボンネット21を配設し、該ボンネット21にはエンジンEを内蔵している。ボンネット21の後方にはステアリングハンドル23を設けて、該ステアリングハンドル23の後方にはシートSを配設している。
本機後端からは、作業機装着用の昇降装置である3点リンクの油圧リフト22が後方に突出して昇降操作可能に構成されており、該油圧リフト22の後端部にはロータリ等の作業機15が装着可能である。
【0007】
前記シートSの下方にはミッションケースMを配設し、該ミッションケースM後部上方には油圧ケース4、及びバルブユニット24が配設されている。また、シートSの下方には、本機の水平方向に対する傾斜角度を検出する本機センサ2と、作業機の地面に対する傾斜角度を検出する作業機センサ3とが取付けられ、油圧ケース4及びバルブユニット24の前面部と、ミッションケースMの上面部と、シートSの下面部とで囲まれた範囲には、本機の傾斜速度を検知する角速度センサ1が装着されている。油圧リフト22の前方には該油圧リフト22の昇降位置を検出するリフト角センサ5が配設されている。
【0008】
そして、シートS右側方のレバーガイドLGには、油圧リフト22による作業機の昇降操作を行う作業機昇降スイッチ6、バックアップモータによる作業機の上昇操作を入切するバックアップ入切スイッチ8、作業機の角度制御などを行う制御ユニット18、作業機が制御される角度を設定する角度設定器17、エンジンEの回転数を設定するアクセル設定器29及びハンドアクセルレバー27、及びエンジンEの出力やトルクといった特性を切り換えるエンジン特性切換スイッチ30などが配設され、シートS前方のステップ31には、アクセル設定器29を足で操作するフートアクセルペダル28が配設されている。
【0009】
図4に示すように、前記制御ユニット18には、前記角速度センサ1、本機センサ2、作業機センサ3、作業機昇降スイッチ6、バックアップ入切スイッチ8、角度設定器17等が接続されており、作業機15の制御角度を角度設定器17により設定し、制御ユニット18に前記センサ1・2・3により検出された値が入力されると、該制御ユニット18によってスイングバルブ12がONされ、リフトシリンダ16が作動されて、角度設定器17で設定した角度まで作業機15を角度制御する。
また、作業機昇降スイッチ6やバックアップ入切スイッチ8をONすると、制御ユニット18によってリフトバルブ13がONされ、油圧リフト22が作動されて、作業機15が昇降するよう構成している。
そして、制御ユニット18には、作業切換スイッチである3P切換スイッチ32を接続して、該制御ユニット18による制御を、角度制御と、負荷制御と、深さ制御との3パターンに切換えられるようにしている。
【0010】
次に、角度制御装置について説明する。
作業機の角度制御装置は、本機センサ2と作業機センサ3とで、本機の水平に対する傾斜角度及び作業機15の地面に対する傾斜角度を検出するとともに、角速度センサ1により本機の傾斜速度を検出し、これらの検出値を前記制御ユニット18で演算して、その演算結果に基づいて、角度設定器17で設定した角度まで作業機15を左右回動動作させ、該作業機15を地面に対して適正な角度に制御するものである。
尚、本角度制御装置に用いた角速度センサ1は、圧電セラミックスで構成されたセンサであり、振動子に角速度が加わると歪みが生じるが、その歪みを増幅して検出することで、本機の傾斜速度を検出している。
【0011】
この作業機の角度制御の流れの概略を図5により説明する。
まず、角速度センサ1、本機センサ2、作業機センサ3、及び角リフトセンサ5により検出された値が、また、3P切換スイッチ32により選択した制御の種類が、制御ユニット18に入力され、各センサ1・2・3・5に異常がなければ、3P切換スイッチ32と角リフトセンサ5との入力値の関係によって補正マップが読み込まれる。 その後、角速度センサ1からの入力値に応じて角速度センサグレードTjが算出され、本機センサ2及び作業機センサ3からの入力値に応じて傾斜センサグレードTiが算出される。
そして、図6に示すように、角速度センサグレードTjと傾斜センサグレードTiとによって求められる2次元のTijマップによって、作業機の駆動方向、駆動方法が決定される。即ち、作業機の右側が上方に傾いているときには、右側を下げるソレノイドがONされ、右側が下方に傾いているときには、右側を上げるソレノイドがONされて、該作業機が角度設定器17で設定した角度まで回動されて停止する。
このようにして、角速度センサ1を用いた角度制御を行うのであるが、従来は、実際に検出した状態から数百msec後にしか作業機15の傾斜角度を知り得なかったものが、角速度センサ1を加えることで、数msec後に作業機の傾斜方向を知り得ることとなったので、作業機の姿勢変化に傾斜制御を追随させることが可能となり、高速走行での作業においても作業機の地面に対する水平状態を保つことができて、ロータリ等の作業の仕上がりを格段に向上させることができた。
【0012】
また、角速度センサ1に異常があった場合には、角速度センサ異常モードが作動する。図7に示すように、角速度センサ異常モードでは、本機傾斜センサの値Vbと作業機センサの補正値Vc’との偏差を演算し、これにより求まる駆動マップを読み込む。
そして、油圧リフト22が図8における範囲Hr及び範囲Hになければ、即ち、範囲Lに油圧リフト22があれば、前述のように作業機15の傾斜状況に応じて、角度制御を行う。
ここで、図8における範囲Hrは、油圧リフト22の最上昇位置aから若干下方に下がった位置までの範囲であり、範囲Hrは、例えば数度程度である。また、範囲Hは、範囲Hrから下方に若干下がった位置までの範囲であり、範囲Lは、範囲Hの下端から下方の範囲である。
【0013】
このように、角速度センサ1に異常があって、該角速度センサ1が使用できない状態のときには、本機センサ2と作業機センサ3とのみによって、角度制御を行うように構成している。
この場合、角速度センサ1を用いて角度制御したときに比べて、傾斜角度の検出速度が遅くなるので、トラクタの作業走行速度を遅くする必要があるが、走行速度を落とせば、作業の仕上がり状態は、角速度センサ1を用いた場合と何らかわるものではなく、良好に仕上げることができる。
【0014】
角速度センサ1は、前述のように、素早く作業機15の傾斜方向を検出することができるが、振動や水に対して弱いのでなるべくトラクタの内部に、また、本機の左右方向の角速度を検出するため本機左右方向の中心部に設置する必要がある。
そして、該角速度センサ1は、本機後方に装着した作業機15の角度制御を行うためのものなので、できるだけ本機後部に設置したほうが、検出精度を高くすることができる。
また、例えば、角速度センサ1を、防震支持されたキャビンなどに設置すると、本機の動作が直接伝達されないために、本機の真の傾斜角速度を検出することができない。
【0015】
そこで、本トラクタにおける角速度センサ1は、油圧ケース4及びバルブユニット24の前面部と、ミッションケースMの上面部と、シートSの下面部とで囲まれた範囲である、角速度センサ設置範囲35に装着しており、特に、この範囲内の左右方向における略中央部に配置している。
これにより、角速度センサ1には不要な振動が伝達されにくく、地面の土や石などによる衝撃を受けることもなく、高圧で洗車を行っても多量の水を浴びたり、水による衝撃を受けたりすることがないため、該角速度センサ1の故障を防止することができ、また、本機の傾斜速度を高精度で検出することができるのである。
【0016】
次に、トラクタの別構成を図9に示す。
該トラクタは、図1乃至図3に示すトラクタと同様に、前後に前輪FW’、後輪RW’を懸架する本機の前部にボンネット21’を配設し、該ボンネット21’にはエンジンE’を内蔵している。ボンネット21’の後方にはステアリングハンドル23’を設けて、該ステアリングハンドル23’の後方にはシートS’を配設している。
本機後端からは、作業機装着用の昇降装置である3点リンクの油圧リフト22’が後方に突出して昇降操作可能に構成されており、該油圧リフト22’の後端部にはロータリ等の作業機15’が装着されている。
【0017】
そして、前記シートS’の下方にはミッションケースを配設し、該ミッションケース後部上方には油圧ケース、及びバルブユニットが配設されている。また、シートS’の下方には、本機の水平方向に対する傾斜角度を検出する本機センサ2’と、作業機の地面に対する傾斜角度を検出する作業機センサ3’とが取付けられ、油圧ケース及びバルブユニットの前面部と、ミッションケースの上面部と、シートの下面部とで囲まれた範囲には、本機の傾斜速度を検知する角速度センサ1’が装着されている。油圧リフト22の前方には該油圧リフト22の昇降位置を検出するリフト角センサ5’が配設されている。
さらに、シートS’右側方のレバーガイドLG’には、油圧リフト22’による作業機の昇降操作を行う作業機昇降スイッチ6’、バックアップモータ19による作業機の上昇操作を行うポジションスイッチ25、及び作業機の角度制御などを行う制御ユニット18’などが配設されており、前記ポジションスイッチ25による作業機の上昇操作はバックアップ入切スイッチ8’によって入切できる。
【0018】
図10に示すように、前記制御ユニット18’には、前記角速度センサ1’、本機センサ2’、作業機センサ3’、リフト角センサ5’、作業機昇降スイッチ6’、バックアップ入切スイッチ8’、ポジションスイッチ34等が接続されており、制御ユニット18’に前記センサ1’・2’・3’により検出された値が入力されると、該制御ユニット18’によってスイングバルブ12’がONされ、リフトシリンダ16’が作動されて、作業機15を角度制御する。
また、作業機昇降スイッチ6’をONすると油圧により油圧リフト22’が昇降して、ポジションレバー25を操作するとポジションスイッチ34がONし、制御ユニット18’によってバックアップモータ19が作動して、油圧リフト22’が昇降するよう構成している。
そして、制御ユニット18’には、3P切換スイッチ32’などを配置した操作ボックス33を接続して、該制御ユニット18’による制御を、角度制御と、負荷制御と、深さ制御との3パターンに切換えられるようにしている。
【0019】
このように構成したトラクタにおいては、作業機15’の最上昇位置をワイヤーなどで任意の高さに規制するメカ式リフト上げ高さ調整機構が構成されており、シートSの右方に配設したメカ式上げ高さダイヤル21の操作により高さ設定するようにしている。
また、作業機15’の角度制御は前述の如く、図5に示したフローによって行われるが、例えば、該角度制御が本機センサ2’と作業機センサ3’とによって行われる場合に、前述のメカ式リフト上げ高さ調整機構によって、作業機15’を支持している油圧リフト22’の最上昇位置が、図8における範囲Lの位置に規制されていると、作業機15’が最上昇位置に位置しているにもかかわらず角度制御がなされて、畦や畦畔を破損することがある。
【0020】
これを防止するために、図5における本機平行制御ルーチンにおいては、リフト角センサー5’が、図8における油圧リフト22’が範囲Hrの位置にあることを検出した場合、又は、前記バックアップモータ19に図10のモータ上昇信号36が入力された場合に、作業機15’を本機と平行になるよう角度制御するようにしている。
この角度制御の流れを図11により説明する。本機平行制御ルーチンが作動した場合には、バックアップモータ19にモータ上昇信号36が入力されたか、又は、油圧リフト22’が範囲Hrの位置にある場合に、本機傾斜センサの値Vbと作業機センサの補正値Vc’との偏差を演算し、作業機15’の傾斜状態に応じて該作業機15’を角度制御して本機と平行になるように構成している。
【0021】
これにより、油圧リフト22’が範囲Hrの位置にある場合は勿論のこと、油圧リフト22’がメカ式リフト上げ高さ調整機構により規制されて範囲Lの位置にある場合でもバックアップモータ19のモータ上昇信号36がONされると、作業機15’が本機と平行に角度制御されるので、旋回時などに畦や畦畔を破損することが防止できる。
【0022】
次に、トラクタのエンジン制御装置について説明する。
図1乃至図3に示すトラクタの本機前部において、ボンネット21内のエンジンE側方に、燃料噴射量の増減を行なう電子燃料噴射装置37が配設され、エンジンEの前方には該電子燃料噴射装置37等を制御するエンジン制御コントローラ38が配設されている。
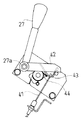
また、図12、図13に示すように、前記シートSの右側方のレバーガイドLGには、エンジンEの回転数を設定するアクセル設定器29、及び該アクセル設定器29を手動操作するハンドアクセルレバー27を配置し、シートS前方のステップ31には、アクセル設定器29を足で操作するフートアクセルペダル28を配置している。
【0023】
ハンドアクセルレバー27は、操作軸27aを中心に回動可能としており、該ハンドアクセルレバー27を前後に回動すると、操作軸27aが一体的に回動してアクセル設定器29が操作されるよう構成している。
また、操作軸27aからは後方に操作アーム42が突出し、該操作アーム42にはワイヤーガイド43が取付けられている。該ワイヤーガイド43とフートアクセルペダル28とはワイヤ41で連結されて、フートアクセルペダル28を踏圧するとワイヤ41が該フートアクセルペダル28側に引かれて、操作アーム42が下方に回動するよう構成している。
ワイヤ41はワイヤーガイド43に対して摺動可能に連結されており、ワイヤ41を引くと、該ワイヤ41の先端部がワイヤーガイド43に係止して操作アーム42を下方に回動し、引いていたワイヤ41を緩めると、バネ44の付勢力によって操作アーム42が上方に回動するよう構成している。
この、操作アーム42の上下回動に伴って操作軸27aが回動して、アクセル設定器29が操作される。即ち、フートアクセルペダル28の操作によっても、ハンドアクセルレバー27と同様にアクセル設定器29の操作が行なえるのである。
【0024】
以上のように、アクセル設定器29、及びハンドアクセルレバー27を、エンジンEから離れた位置であるシートSの右方のレバーガイドLGに配設したので、アクセル設定器29はエンジンEの振動を直接に受けること、及びエンジンルーム内の高温に晒されることがなく、また、洗車時などに水が掛かることもないので、該アクセル設定器29の耐久性が向上する。
また、特に、大型のトラクタなどでは、本機後部に様々な作業機を装着することが多く、この場合、作業者は右後方を見ながらエンジンEの回転数をコントロールする必要があるが、シートS右方のレバーガイドLGにハンドアクセルレバー27を配設しているために、操作性が向上するのである。
さらに、アクセル設定器29と、ハンドアクセルレバー27、及びフートアクセルペダル28とを、1本のワイヤ41で連結しているので、ハンドアクセルレバー27及びフートアクセルペダル28を、アクセル設定器29へそれぞれ別のワイヤで(即ち、2本のワイヤで)連結した場合よりも、アイドル状態や最大値の設定などを確実に行なうことができて、信頼性を向上させることができる。
【0025】
図14において、エンジン制御装置のブロック図を示す。
前記エンジン制御コントローラ38には、前記アクセル設定器29、エンジンEの回転数を検出する回転数センサ45、エンジンEのラック位置を検出するラック位置センサ46、及びエンジン特性を切り換えるエンジン特性切換スイッチ30などが接続されている。
エンジン特性切換スイッチ30は、エンジンEの特性を、標準モード、管理モード、及び高速耕耘モードに切り換えることができ、該スイッチ30を何れかのモードに設定すると、エンジンEの出力やトルクといった特性がエンジン制御装置により制御されるのである。
【0026】
このエンジン制御の流れを図15により説明する。
先ず、エンジン制御コントローラ38により、アクセル設定器29の設定値、回転数センサ45が検出したエンジン回転数、及びラック位置センサ46が検出したラック位置が読み込まれ、エンジン特性切換スイッチ30の設定モードなどが入力される。
そして、エンジン特性切換スイッチ30の設定が、標準モードであれば標準モードの出力マップが読み込まれ、高速耕耘モードであれば高速耕耘モードの出力マップが読み込まれ、管理モードであれば管理モードの出力マップが読み込まれて、演算される。その後に、それぞれのモードに応じたラックソレノイド出力がなされて、図14のラックアクチュエータ47により、エンジンEが制御される。
【0027】
図16、図17に、以上のように制御したそれぞれのエンジン特性を示す。図16は、エンジン回転数と出力との関係を示し、図17は、エンジン回転数とトルクとの関係を示している。
曲線51及び曲線61は標準モードの場合の出力とトルクとを示しており、低回転域に最大トルクが設けられている。曲線52及び曲線62は高速耕耘モードの場合の出力とトルクとを示しており、高回転域に最大トルクが設けられて、出力及び最大トルクの値は、標準モードの場合とほぼ等しく設定されている。
また、管理モードの場合の出力とトルクとは、曲線53及び曲線63により示されており、出力及びトルクの値は、標準モードの場合に比べて数10%程度低く設定されている。
【0028】
そして、通常はエンジン特性切換スイッチ30を標準モードに設定して、曲線51と曲線61とで示される出力及びトルクが、PTO軸に伝達される状態で作業を行なう。
また、ジャイロテッダーなどの軽作業を行なう際には、PTO軸の回転数はある程度必要となるため、エンジン回転数を必要な値に設定し、エンジン特性切換スイッチ30を管理モードに設定して、作業を行なう。
管理モードに設定すると、曲線52と曲線62とで示されるような、標準モードの場合に比べて数10%程度低く設定された出力及びトルクが得られるため、作業機15が障害物に接触しても破壊することなく任意の回転で作業を行なうことができ、無駄な出力を抑えることで燃料消費量を減少することができる。
また、プラウなどの重作業を行なう場合には、標準モードに戻せば高出力作業を行なうことができる。
さらに、高速耕耘作業を行なうときには、高速耕耘モードに設定すれば、高速耕耘作業に適したエンジン特性を得ることができる。
【0029】
トラクタに本機の傾斜速度を検知する角速度センサを配設して、作業機の水平制御を素早く行う角度制御装置を構成したので、作業機の傾斜方向を瞬時に知り得るとともに、作業機の姿勢変化に傾斜制御を追随させることが可能となり、高速走行での作業においても作業機の地面に対する水平状態を保つことができて、ロータリ等の作業の仕上がりを格段に向上させることができた。
【0030】
また、トラクタに本機の傾斜速度を検知する角速度センサを配設し、通常は該角速度センサと、本機センサと、作業機センサとの検出結果に基づいて、作業機の傾斜角度を任意に設定した角度に制御し、該角速度センサが故障した場合には、本機センサと、作業機センサとの検出結果のみに基づいて作業機の傾斜角度を制御する角度制御装置を構成したので、角速度センサに異常があって使用できない状態のときでも、トラクタの走行速度を若干遅くすれば、角速度センサを用いた場合と同様に作業を良好に仕上げることができた。
【0031】
また、トラクタに本機の傾斜速度を検知する角速度センサを配設して、該角速度センサと、本機センサと、作業機センサとの検出結果に基づいて、作業機の傾斜角度を任意に設定した角度に制御する角度制御装置を構成し、該角速度センサを、油圧ケース及びバルブユニット前面部と、ミッションケースの上面部と、シートの下面部とで囲まれた範囲に装着したので、角速度センサには不要な振動が伝達されにくく、地面の土や石などによる衝撃を受けることもなく、高圧で洗車を行っても多量の水を浴びたり、水による衝撃を受けたりすることがないため、該角速度センサの故障を防止することができ、また、本機の傾斜速度を高精度で検出することができた。
【0032】
また、リフト角センサにより検出される作業機の昇降位置が予め設定した角度範囲にある場合、又はバックアップモータに対する上昇信号が発生した場合には、該作業機を本機に対して平行に制御する角度制御装置を構成したので、油圧リフトが最上昇位置近傍にある場合は勿論のこと、油圧リフトが低位置にある場合でもバックアップモータのモータ上昇信号がONされると、作業機が本機と平行に角度制御されることとなって、旋回時などに畦や畦畔を破損することが防止できた。
【0033】
また、エンジン出力とエンジントルクとを変化させるエンジン特性切換スイッチを設け、該エンジン特性切換スイッチにより、作業に適したエンジン出力とエンジントルクとに設定可能とするエンジン制御装置を構成したので、通常の作業やプラウなどの重作業を行なう場合には、低回転高トルク、及び高出力で作業を行なうことができ、また、ジャイロテッダーなどの軽作業を行なう際にはスイッチを切り換えるだけで、作業機が障害物に接触しても破壊することがない状態において任意の回転で作業を行なうことができ、さらに、無駄な出力を抑えて燃料消費量を減少することができた。
そして、高速耕耘作業を行なうときには、スイッチを切り換えるだけで高速耕耘作業に適したエンジン特性を得ることができた。
【0034】
【発明の効果】
本発明は以上の如く構成したので、次のような効果を奏するのである。
電子燃料噴射装置37を有するエンジンEと、該エンジンEの回転数を設定するアクセル設定器29と、該アクセル設定器29を動作させるハンドアクセルレバー27及びフートアクセルペダル28とを備えたトラクタにおいて、シートSの側方のレバーガイドLG部に該アクセル設定器29、及びアクセル設定器29を手動操作するハンドアクセルレバー27を配置し、シートSの前方のステップ31には、アクセル設定器29を足で操作するフートアクセルペダル28を配置し、前記ハンドアクセルレバー27は操作軸27aを中心に回動可能とし、該ハンドアクセルレバー27の前後回動により、該操作軸27aが一体的に回動してアクセル設定器29を設定操作すべく構成し、また、操作軸27aから後方に操作アーム42を突出し、該操作アーム42にワイヤーガイド43を取付け、該ワイヤーガイド43とフートアクセルペダル28との間をワイヤ41で連結し、前記フートアクセルペダル28を踏圧すると、該ワイヤ41が該フートアクセルペダル28側に引かれて、操作アーム42が下方に回動し、該ワイヤ41の先端部がワイヤーガイド43に係止して操作アーム42を下方に回動し、逆に引いていたワイヤ41を緩めると、付勢力によって操作アーム42が上方に回動するようバネ44を介装し、前記操作アーム42の上下回動に伴い操作軸27aを回動し、アクセル設定器29を操作し、フートアクセルペダル28の操作によっても、ハンドアクセルレバー27と同様にアクセル設定器29の操作を可能としたので、アクセル設定器が振動や高温に晒されることがなく、水が掛かることもないので、該電子式または電気式に構成したアクセル設定器の耐久性が向上するのである。
また、後方を見ながらエンジン回転数をコントロールする場合などの、不安定な姿勢でのアクセル設定器の操作性を向上することが出来たのである。
さらに、該電子式または電気式により構成したアクセル設定器によるアイドル状態や最大値の設定などを確実に行なうことができて、設定の信頼性を向上させることができたのである。
【図面の簡単な説明】
【図1】 トラクタを示す全体側面図である。
【図2】 同じくトラクタを示す全体平面図である。
【図3】 同じくトラクタを示す全体後面図である。
【図4】 角度制御装置を示すブロック図である。
【図5】 角度制御装置のフローチャートの概略を示す図である。
【図6】 角速度センサのグレードと傾斜のグレードとのマップを示す図である。
【図7】 角速度センサ異常モードのフローチャートを示す図である。
【図8】 油圧リフトの上昇位置の範囲を示す側面図である。
【図9】 トラクタの別実施例を示す平面図である。
【図10】 同じく角度制御装置を示すブロック図である。
【図11】 本機平行制御ルーチンのフローチャートを示す図である。
【図12】 アクセル設定器の配置位置を示す平面図である。
【図13】 ハンドアクセルレバーを示す側面図である。
【図14】 エンジン制御装置を示すブロック図である。
【図15】 エンジン制御のフローチャートを示す図である。
【図16】 各エンジン特性モードにおけるエンジン回転数と出力との関係を示す図である。
【図17】 各エンジン特性モードにおけるエンジン回転数とトルクとの関係を示す図である。
【符号の説明】
E エンジン
M ミッションケース
S シート
LG レバーガイド
1 角速度センサ
2 本機センサ
3 作業機センサ
4 油圧ケース
5 リフト角センサ
17 角度設定器
18 制御ユニット
19 バックアップモータ
22 油圧リフト
24 バルブユニット
27 ハンドアクセルレバー
28 フートアクセルペダル
29 アクセル設定器
30 エンジン特性切換スイッチ
35 角速度センサ設置範囲
37 電子燃料噴射装置
Claims (1)
- 電子燃料噴射装置37を有するエンジンEと、該エンジンEの回転数を設定するアクセル設定器29と、該アクセル設定器29を動作させるハンドアクセルレバー27及びフートアクセルペダル28とを備えたトラクタにおいて、
シートSの側方のレバーガイドLG部に該アクセル設定器29、及びアクセル設定器29を手動操作するハンドアクセルレバー27を配置し、シートSの前方のステップ31には、アクセル設定器29を足で操作するフートアクセルペダル28を配置し、
前記ハンドアクセルレバー27は操作軸27aを中心に回動可能とし、該ハンドアクセルレバー27の前後回動により、該操作軸27aが一体的に回動してアクセル設定器29を設定操作すべく構成し、
また、操作軸27aから後方に操作アーム42を突出し、該操作アーム42にワイヤーガイド43を取付け、該ワイヤーガイド43とフートアクセルペダル28との間をワイヤ41で連結し、
前記フートアクセルペダル28を踏圧すると、該ワイヤ41が該フートアクセルペダル28側に引かれて、操作アーム42が下方に回動し、該ワイヤ41の先端部がワイヤーガイド43に係止して操作アーム42を下方に回動し、逆に引いていたワイヤ41を緩めると、付勢力によって操作アーム42が上方に回動するようバネ44を介装し、
前記操作アーム42の上下回動に伴い操作軸27aを回動し、アクセル設定器29を操作し、フートアクセルペダル28の操作によっても、ハンドアクセルレバー27と同様にアクセル設定器29の操作を可能としたことを特徴とするトラクタ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17988897A JP3734065B2 (ja) | 1997-07-04 | 1997-07-04 | トラクタ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17988897A JP3734065B2 (ja) | 1997-07-04 | 1997-07-04 | トラクタ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1118507A JPH1118507A (ja) | 1999-01-26 |
| JP3734065B2 true JP3734065B2 (ja) | 2006-01-11 |
Family
ID=16073660
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP17988897A Expired - Fee Related JP3734065B2 (ja) | 1997-07-04 | 1997-07-04 | トラクタ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3734065B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010227071A (ja) * | 2009-03-30 | 2010-10-14 | Iseki & Co Ltd | 農作業車 |
| JP2014172562A (ja) * | 2013-03-12 | 2014-09-22 | Kubota Corp | 作業車のアクセル操作構造 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000013290A (ja) | 1998-06-24 | 2000-01-14 | Matsushita Electric Ind Co Ltd | ダイバーシチ通信装置及び方法 |
| JP4908732B2 (ja) * | 2003-07-04 | 2012-04-04 | 株式会社Ihiシバウラ | 農用作業車 |
| KR102325284B1 (ko) * | 2017-05-30 | 2021-11-12 | 엘에스엠트론 주식회사 | 농작업차량에서의 수평제어 시스템 |
-
1997
- 1997-07-04 JP JP17988897A patent/JP3734065B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010227071A (ja) * | 2009-03-30 | 2010-10-14 | Iseki & Co Ltd | 農作業車 |
| JP2014172562A (ja) * | 2013-03-12 | 2014-09-22 | Kubota Corp | 作業車のアクセル操作構造 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1118507A (ja) | 1999-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3734065B2 (ja) | トラクタ | |
| JP7042781B2 (ja) | 作業車両 | |
| JP2520159B2 (ja) | バックホウのバックホウ装置操作構造 | |
| JP3838320B2 (ja) | 水平制御装置 | |
| JP2696332B2 (ja) | バケット作業部の姿勢制御装置 | |
| JPH036Y2 (ja) | ||
| JPH08149903A (ja) | トラクターのエンジン制御構造 | |
| JP3721855B2 (ja) | 水平制御装置 | |
| JP3302480B2 (ja) | 田植機 | |
| JPH0510562Y2 (ja) | ||
| JP3293247B2 (ja) | 田植機における植付部のリフト制御感度調節装置 | |
| JP2000253706A (ja) | トラクタの対地作業機ローリング制御装置 | |
| JP3701728B2 (ja) | 農用トラクタ | |
| JP2987292B2 (ja) | 作業機 | |
| JP3517049B2 (ja) | 土作業機 | |
| JP3332410B2 (ja) | 耕耘装置の昇降制御装置 | |
| JPH0739201A (ja) | トラクタの油圧ケース | |
| JPH1189341A (ja) | 水田作業機 | |
| JP4984393B2 (ja) | 作業車両 | |
| JP3324121B2 (ja) | 苗植機 | |
| JP2000170564A (ja) | トラクタのエンジン回転制御装置 | |
| JP2668526B2 (ja) | 田植機 | |
| JPH0647205Y2 (ja) | 農作業機の角度制御装置 | |
| JP3785827B2 (ja) | トラクタの昇降制御装置 | |
| JP2000287502A (ja) | 対地作業機付トラクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041021 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051011 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051012 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |