JP3699592B2 - ハイブリッド駆動車両の制御装置 - Google Patents
ハイブリッド駆動車両の制御装置 Download PDFInfo
- Publication number
- JP3699592B2 JP3699592B2 JP17357598A JP17357598A JP3699592B2 JP 3699592 B2 JP3699592 B2 JP 3699592B2 JP 17357598 A JP17357598 A JP 17357598A JP 17357598 A JP17357598 A JP 17357598A JP 3699592 B2 JP3699592 B2 JP 3699592B2
- Authority
- JP
- Japan
- Prior art keywords
- air
- motor
- fuel ratio
- generator
- engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/20—Control strategies involving selection of hybrid configuration, e.g. selection between series or parallel configuration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/06—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving electric generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K6/485—Motor-assist type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/42—Control modes by adaptive correction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0605—Throttle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0616—Position of fuel or air injector
- B60W2710/0622—Air-fuel ratio
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/915—Specific drive or transmission adapted for hev
- Y10S903/917—Specific drive or transmission adapted for hev with transmission for changing gear ratio
Description
【発明の属する技術分野】
本発明は、車両用駆動源として内燃エンジン及びモータ(発電電動機)を備えたハイブリッド駆動車両の制御装置に関する。
【0002】
【従来の技術】
駆動源としてエンジン及びモータを備えたハイブリッド駆動車両は従来より知られており、例えば、特開平3−121928号公報にはそのようなハイブリッド駆動車両の制御装置が示されている。
かかる制御装置においては、車両の運転状態に応じてモータを駆動すると共にエンジンの出力を制御することが行なわれる。具体的には、車両の運転状態に応じてモータの動作モードを判定し、加速モード時にはモータに駆動電力を供給してエンジンの出力の補助をなし、減速モード時にはモータを回生制動状態にしてモータによる回生電力を蓄電器に蓄電することが行なわれる。また、その蓄電器に蓄電された電力は加速モード時のモータ駆動電力として使用される。
【0003】
このようなハイブリッド駆動車両においてもエンジンに供給する混合気の空燃比を車両の運転状態に応じて制御することが行なわれている。例えば、運転状態がクルーズ運転にあるときには燃費向上のために目標空燃比がリーン空燃比(例えば、16)に設定されてリーン燃焼制御が行なわれ、また、エンジン出力が必要な運転状態のときには理論空燃比(例えば、14.7)に設定されてストイキ燃焼制御が行なわれる。リーン燃焼制御時にはエンジンの出力トルクはストイキ燃焼制御時に比べて低下するので、リーン燃焼制御からストイキ燃焼制御に、或いはストイキ燃焼制御からリーン燃焼制御に急に変化する運転時にはエンジンの出力トルクの差が大きいためにトルクショックが生じる。
【0004】
このようなトルクショックの緩和のために、内燃エンジンのスロットル弁の開度を制御する電子スロットル弁制御装置を利用することが公知である。電子スロットル弁制御装置は、通常、運転者がアクセルペダルを操作したときにその操作に対応して適切な速度感覚を得ることができるようにスロットル弁の開度を制御するものである。一方、上記したような空燃比の急変時には、アクセルペダルの操作とは無関係にスロットル弁開度を制御してエンジンの出力トルクが急変しないように動作する。また、2次空気をスロットル弁下流の吸気管内に供給する2次空気供給装置を同様のトルクショックの緩和のために用いることもある。
【0005】
【発明が解決しようとする課題】
しかしながら、空燃比の急変時に電子スロットル弁制御装置又は2次空気供給装置がエンジンの出力トルクの変化を防止するために動作しても、エンジンへの空気供給の遅延により制御結果が反映されるまでの時間遅延のためにトルクショックが生じないように出力トルク差を十分に補償することができないという問題点があった。
【0006】
そこで、本発明の目的は、供給混合気の空燃比の急変時のエンジンの出力トルク差を時間遅延なく十分に補償することができるハイブリッド駆動車両の制御装置を提供することである。
【0007】
【課題を解決するための手段】
本発明のハイブリッド駆動車両の制御装置は、車両用駆動源としての内燃エンジンと、車両用駆動源として内燃エンジンの出力を補助する電動機として作動し、かつ車両の走行エネルギを回生して蓄電手段を充電する発電機として作動する発電電動機とを備えたハイブリッド駆動車両の制御装置であって、エンジンに供給される混合気の空燃比の変化を検出する空燃比検出手段と、空燃比検出手段によって空燃比がリッチ側からリーン側に変化したことを検出した場合には発電電動機を電動機として作動させ、空燃比がリーン側からリッチ側に変化したことを検出した場合には発電電動機を発電機として作動させる発電電動機制御手段と、を備え、発電電動機制御手段は、車両の運転状態に応じて空燃比の変化を検出した時の内燃エンジンの出力トルク差を推定し、発電電動機が電動機として作動するときにはその推定した出力トルク差に応じてその電動機の駆動力を制御し、その後、電動機の駆動力を徐々に減少させ、発電電動機が発電機として作動するときには、推定した出力トルク差に応じてその発電機の回生制動力を制御し、その後、発電機の回生制動力を徐々に減少させることを特徴としている。
【0008】
かかる本発明のハイブリッド駆動車両の制御装置によれば、例えば、ストイキ燃焼制御からリーン燃焼制御に変化したためエンジンへの供給混合気の空燃比がリーン側に変化したことが検出されたときにはその直後にエンジンの出力の補助をするために発電電動機を電動機として作動させ、また、例えば、リーン燃焼制御からストイキ燃焼制御に変化したため供給混合気の空燃比がリッチ側に変化したことが検出されたときにはその直後に回生制動のために発電電動機を発電機として作動させるので、供給混合気の空燃比の変化時のエンジンの出力トルク差を時間遅れなく十分に補償することができる。
【0009】
また、本発明のハイブリッド駆動車両の制御装置においては、車両の運転状態に応じて空燃比の変化を検出した時の内燃エンジンの出力トルク差を推定し、その推定した出力トルク差に応じて発電電動機の駆動力又は回生制動力を制御することにより、供給混合気の空燃比の変化時のエンジンの出力トルク差に対して適切なモータの駆動状態又は回生状態を得ることができる。
【0010】
更に、本発明のハイブリッド駆動車両の制御装置においては、空燃比検出手段によって空燃比がリーン側に変化したことが検出されると、発電電動機を電動機として作動させた後、電動機の駆動力を徐々に減少させ、空燃比検出手段によって空燃比がリッチ側に変化したことが検出されると、発電電動機を発電機として作動させた後、発電機の回生制動力を徐々に減少させることにより、空燃比の急変後の適切な出力トルクにトルクショックを生じることなく一致させることができる。
【0011】
【発明の実施の形態】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
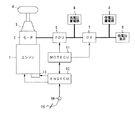
図1は本発明によるハイブリッド駆動車両の制御装置を示している。このハイブリッド駆動車両の制御装置においては、エンジン1のクランク軸は発電電動機である直流モータ2の回転軸と直結されており、モータ2の回転軸の回転は変速機構3を介して駆動輪4に伝達されるようになっている。変速機構3はマニアル式のものである。モータ2にはPDU(パワードライブユニット)5が接続され、PDU5はエンジン1の出力の補助をするようにモータ2を駆動して電動機として作動させるアシスト動作時にモータ2に駆動電力を供給し、その駆動電力を供給せずにモータ2を発電機として作動させる回生動作時にモータ2の回生電力を例えば、キャパシタからなる高電圧蓄電器6に供給する。
【0012】
PDU5の高電圧蓄電器6との接続ラインにはDV(ダウンコンバータ)7が接続されている。DV7はその接続ラインの高電圧を12V程度の低電圧に電圧変換する。DV7の出力には低電圧蓄電器であるバッテリ8が接続されると共に車両の低電圧負荷9が接続されている。
モータ2の回転制御はMOTECU(モータ電子制御ユニット)11によってPDU5を介して行なわれる。MOTECU11は、図2に示すようにCPU31、RAM32,ROM33、カウンタ34,入力インターフェース(I/F)回路35、出力インターフェース回路36、入出力インターフェース回路37及びA/D変換器38を備えている。CPU31、RAM32,ROM33、カウンタ34,入力インターフェース回路35、出力インターフェース回路36、入出力インターフェース回路37及びA/D変換器38は共にバスに共通接続されている。
【0013】
カウンタ34はクランク角センサ41から出力されたクランクパルスによってリセットされて図示しないクロック発生器から出力されたクロックパルスを計数し、そのクロックパルス発生数を計数することによりエンジン回転数Neを示す信号を発生する。
入力インターフェース回路35にはエンジン1の始動を検出するスタータスイッチ42、変速機構3内のクラッチ(図示せず)の入切を検出するクラッチスイッチ43、変速機構3のニュートラル状態を検出するニュートラルスイッチ44及びブレーキペダルの操作を検出するブレーキスイッチ45が接続されている。入力インターフェース回路35はこれらスイッチ42〜45各々のオンオフを示すデータを保持出力する。
【0014】
A/D変換器38は吸気管内圧PB、冷却水温Tw、スロットル弁開度TH、車速Vs、アクセルペダル開度AP等の車両運転パラメータを検出する複数のセンサからのアナログ信号をディジタル信号に変換するために設けられている。吸気管内圧PBはスロットル弁50下流の吸気管51に設けられた吸気管内圧センサ52によって検出される。冷却水温Twは冷却水温センサ53によって検出される。スロットル弁開度THはスロットル開度センサ54によって検出される。更に、車速Vsは車速センサ55によって検出され、アクセルペダル10の操作開度であるアクセルペダル開度APはアクセルペダルセンサ56によって検出される。また、A/D変換器38には高電圧蓄電器6の両端電圧が供給され、A/D変換器38の出力からは高電圧蓄電器6の両端電圧QCAPがディジタル値として得られるようになっている。
【0015】
出力インターフェース回路36は後述するCPU31の動作によって生成されるアシスト量指令又は回生量指令に応じてPDU5の動作を設定する。入出力インターフェース回路37はENGECU(エンジン電子制御ユニット)12とのデータ通信のための回路である。アシスト量指令が示すアシスト量ASTPWRに応じたアシスト電力(駆動電力)がPDU5からモータ2に供給される。また、回生量指令が示す回生量REGENに応じた回生電力をPDU5はモータ2から得て高電圧蓄電器6及びDV7に供給する。
【0016】
ENGECU12はエンジン1の燃料噴射制御及び点火時期制御等のエンジン制御を行なう。ENGECU12には、図2においては接続ラインを省略しているが、上記のクランク角センサ41、スイッチ41〜45、及び各種センサ52〜56が接続されている他、酸素濃度センサ61が接続されている。酸素濃度センサ61は排気管62に設けられ、排気ガス中の酸素濃度O2を検出する。この酸素濃度センサ61は理論空燃比を閾値としてリッチ側及びリーン側の空燃比で異なるレベルを発生する2値出力型の酸素濃度センサである。ENGECU12の内部構成は上記のMOTECU11と同様であるので、ここでの説明は省略する。ENGECU12においては燃料噴射制御ルーチンがCPU(図示せず)によって処理され、上記の車両運転パラメータ及びエンジン回転数Neを用いて燃料噴射時間Toutが決定される。燃料噴射時間Toutは例えば、次の算出式を用いて算出される。
【0017】
【数1】
Tout=Ti×KO2×KWOT×KLS×KTW×KTA+TACC+TDEC
ここで、Tiはエンジン回転数Neと吸気管内圧力PBとに応じてENGECU12内のROMからのデータマップ検索により決定される空燃比基準制御値である基本燃料噴射時間である。KO2は空燃比フィードバック制御において算出される空燃比補正係数である。KWOTはスロットル弁全開時のような高負荷時の燃料増量補正係数、KLSはリーン化係数、KTWは冷却水温TWに応じて設定される冷却水温補正係数、KTAは吸気温TAに応じて設定される吸気温補正係数、TACCはエンジン回転数Neの加速の程度に応じて設定される加速増量値、TDECはエンジン回転数Neの減速の程度に応じて設定される減速減量値である。補正係数KWOT、KLS、KTW、KTA、加速増量値TACC、減速減量値TDECは、上記のROMからのデータマップ検索により決定される。
【0018】
燃料噴射時間Toutの決定に当たっては、リッチ燃焼制御、リーン燃焼制御及びストイキ燃焼制御とが少なくともある。車両の運転状態に応じてリッチ燃焼制御、リーン燃焼制御及びストイキ燃焼制御のいずれの制御を行なうか決定される。リッチ燃焼制御時には、目標空燃比は理論空燃比(例えば、14.7)より小さい値(例えば、11)に設定され、その目標空燃比になるように空燃比補正係数KO2及び補正係数KWOTが決定される。リーン燃焼制御時には目標空燃比は理論空燃比(例えば、14.7)より大きい値(例えば、16)に設定され、その目標空燃比になるように空燃比補正係数KO2及びリーン化係数KLSが決定される。また、ストイキ燃焼制御においては、酸素濃度センサ61の出力レベルから空燃比が目標空燃比としての理論空燃比よりリッチ又はリーンか判別され、その判別結果に応じて空燃比補正係数KO2が設定される。このように設定された空燃比補正係数KO2が上記の燃料噴射時間Toutの算出式で用いられて燃料噴射時間Toutが決定される。
【0019】
そして、その決定された燃料噴射時間Toutだけインジェクタ63を駆動することが行なわれる。インジェクタ63は内燃エンジンの吸気管51の吸気ポート近傍に設けられ、駆動されたとき燃料を噴射する。また、ENGECU12においては点火時期制御ルーチンがCPUによって処理され、その点火時期制御によって点火装置64の点火プラグ(図示せず)の火花放電が行なわれる。
【0020】
更に、上記のスロットル弁50はいわゆるドライブバイワイヤ(DBW)型のものであるので、エンジン1にはスロットル弁50を開弁駆動するスロットルアクチュエータ13が設けられている。ENGECU12においては、スロットル弁開度制御ルーチンがCPUによって処理され、上記のスロットル弁開度TH、車速Vs、アクセルペダル開度AP等の車両運転パラメータに応じて目標スロットル弁開度θthが決定され、その目標スロットル弁開度θthとなるようにスロットルアクチュエータ13を介してスロットル弁50の開度が制御される。
【0021】
次に、モータ2の制御動作についてCPU31の動作を中心にして説明する。MOTECU11のCPU31は、モータ制御ルーチンを例えば、10msec毎に繰り返し実行し、次に示すように、その時点の動作モードを判定し、判定した動作モードに対応するアシスト量ASTPWR又は回生量REGENを設定する。
【0022】
かかるモータ制御ルーチンにおいて、CPU31は図3及び図4に示すように、先ず、スタータスイッチ42がオンであるか否かを判別する(ステップS1)。エンジン1の始動のためスタータスイッチ42がオンである場合には、エンジン回転数Neがエンジンが停止していると見なすことができるストール回転数NCR(例えば、50rpm)以下であるか否かを判別する(ステップS2)。Ne≦NCRの場合には、モータ動作としてエンジン1を始動させるために始動モードを行なう(ステップS3)。
【0023】
ステップS1においてスタータスイッチ42がオフであると判別した場合には、エンジン停止指令が生成されているか否かを判別する(ステップS4)。エンジン停止指令は、エンジン停止判別ルーチンの実行において、エンジンの運転を停止させるべき運転状態であると判別されたときエンジン停止指令フラグのセットとして生成される。エンジン停止指令が生成されていないならば、ステップS2に進んでエンジン回転数Neがストール回転数NCR以下であるか否かを判別する。エンジン停止指令が生成されているならば、A/D変換器38の出力からスロットル弁50の開度THを得て、そのスロットル弁50のスロットル弁開度THが所定アイドル開度THIDLE(ほとんど全閉の開度)以上であるか否かを判別する(ステップS5)。ステップS2においてNe>NCRの場合、すなわちエンジン1が運転中の場合にはこのステップS5を実行する。TH≧THIDLEの場合にはアシストトリガテーブルから加速フラグFMASTを検索する(ステップS6)。
【0024】
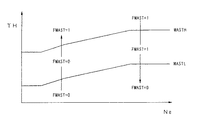
アシストトリガテーブルは、ROM33に予め書き込まれており、図5に示すように、エンジン回転数Neとスロットル弁開度THとに応じて加速フラグFMASTを設定するようになっている。すなわち、閾値MASTH,MASTLはエンジン回転数Neの上昇に応じて徐々に大きくなり、スロットル弁開度THが閾値MASTL以下から大きくなるときには閾値MASTHを越えるまではFMAST=0であり、閾値MASTHを越えると加速すべき運転状態としてFMAST=1となる。逆にスロットル弁開度THが閾値MASTH以上から小さくなるときには閾値MASTLを下回るまではFMAST=1であり、閾値MASTLを下回るとFMAST=0となる。
【0025】
ステップS6の実行後、その検索した加速フラグFMASTが1であるか否かを判別する(ステップS7)。FMAST=0の場合には、動作モードをクルーズモードとする(ステップS8)。FMAST=1の場合には、動作モードを加速モードとする(ステップS9)。
ステップS5においてTH<THIDLEと判別した場合には、スロットル弁50はほぼ全閉であるので、次に車速Vsが0km/hに等しいか否かを判別する(ステップS10)。Vs=0km/hならば、車両は停止しているので、エンジン停止指令が生成されているか否かを判別する(ステップS11)。これはステップS4と同様にである。エンジン停止指令が生成されている場合には、エンジン1の運転を停止するために動作モードをアイドル停止モードとする(ステップS12)。一方、エンジン停止指令が生成されていない場合には、エンジン1のアイドル運転を続けるために動作モードをアイドルモードとする(ステップS13)。
【0026】
ステップS10においてVs≠0km/hならば、車両は走行しているので、エンジン停止指令が生成されているか否かを判別する(ステップS14)。これはステップS4と同様にである。エンジン停止指令が生成されている場合には、エンジン1の運転を減速するために動作モードを減速モードとする(ステップS15)。一方、エンジン停止指令が生成されていない場合には、エンジン1はアイドル運転が要求されているか否かを判別する(ステップS16)。アイドル運転要求は、エンジンアイドル判別ルーチンの実行において、エンジン1をアイドル運転状態にすべきと判別されたときアイドルフラグのセットとして生成される。エンジン1のアイドル運転要求がある場合には動作モードをアイドルモードとし(ステップS13)、アイドル運転要求がない場合には動作モードを減速モードとする(ステップS15)。
【0027】
ステップS8,S9,S12,S13及びS15の各動作モード処理においては、アシスト量ASTPWR又は回生量REGENが設定される。例えば、後述する加速モード処理においてはアシスト量ASTPWRが設定され、減速モード処理においては回生量REGENが設定される。CPU31は設定したアシスト量ASTPWR又は回生量REGENを出力インターフェース回路36に対して出力する(ステップS17)。出力インターフェース回路36はCPU31から供給されたアシスト量ASTPWR又は回生量REGENに応じてPDU5の動作を制御する。アシスト量ASTPWRの場合にはPDU5はアシスト量ASTPWRに応じたアシスト電力をモータ2に供給する。回生量REGENの場合にはモータ2は回生制動状態になり、PDU5は回生量REGENに応じた回生電力をモータ2から得て高電圧蓄電器6又はDV7に供給する。
【0028】
加速モード処理においては、CPU31は図6に示すように、先ずRAM初期化動作を行なう(ステップS21)。この初期化動作では例えば、RAM32内に一時的に記憶された回生量REGEN等の値が0とされる。初期化動作後、CPU31はクラッチスイッチ43のオンオフを読み取ってクラッチが動力伝達状態であるか否かを判別する(ステップS22)。クラッチスイッチ43がオンならば、クラッチは動力切断状態であるので、アシスト量ASTPWRを0とする(ステップS23)。そして、モータ2による回生電力を低電圧負荷9に供給するようにDV7を制御する(ステップS24)。
【0029】
クラッチスイッチ43がオフならば、クラッチは動力伝達状態であるので、次に、ニュートラルスイッチ44のオンオフを読み取って変速機構3がニュートラル状態であるか否かを判別する(ステップS25)。ニュートラルスイッチ44がオンのためニュートラル状態である場合にはステップS23に進んでアシスト量ASTPWRを0とする。
【0030】
ニュートラルスイッチ44がオフのためインギア状態である場合には、高電圧蓄電器6の両端電圧QCAPを読み取ってその両端電圧QCAPが下限閾値QCAPLMTLより大であるか否かを判別する(ステップS26)。下限閾値QCAPLMTLはモータ2による有効なアシスト可能電圧、例えば、蓄電器6の満充電電圧の70%程度に設定しても良く、蓄電器6の容量によって適宜設定可能である。QCAP≦QCAPLMTLならば、ステップS23に進んでアシスト量ASTPWRを0とする。一方、QCAP>QCAPLMTLならば、アシスト量ASTPWRをマップ検索して求める(ステップS27)。ROM33には、図7に示すように、エンジン回転数Neとスロットル弁開度THとに応じて定まるアシスト量ASTPWRがASTPWR#n11〜ASTPWR#n2010のように加速時ASTPWRデータマップとして予め書き込まれている。よって、そのときのエンジン回転数Neとスロットル弁開度THとに対応するアシスト量ASTPWRを加速時ASTPWRデータマップから検索することができる。ステップS27の実行後、CPU31は高電圧蓄電器6の蓄電電力を低電圧負荷9に供給するようにDV7を制御する(ステップS28)。
【0031】
減速モード処理においては、CPU31は図8に示すように、先ずRAM初期化動作を行なう(ステップS31)。この初期化動作では例えば、RAM32内に一時的に記憶されたアシスト量ASTPWR等の値が0とされる。初期化動作後、CPU31はクラッチスイッチ43のオンオフを読み取ってクラッチが動力伝達状態であるか否かを判別する(ステップS32)。クラッチスイッチ43がオンならば、クラッチは動力切断状態であるので、回生量REGENを0とする(ステップS33)。
【0032】
クラッチスイッチ43がオフならば、クラッチは動力伝達状態であるので、次に、ニュートラルスイッチ44のオンオフを読み取って変速機構3がニュートラル状態であるか否かを判別する(ステップS34)。ニュートラルスイッチ44がオンのためニュートラル状態である場合にはステップS33に進んで回生量REGENを0とする。
【0033】
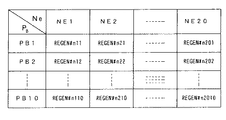
ニュートラルスイッチ44がオフのためインギア状態である場合には、モータ2による回生電力を低電圧負荷9に供給するようにDV7を制御し(ステップS35)、そして、高電圧蓄電器6の両端電圧QCAPを読み取ってその両端電圧QCAPが上限閾値QCAPLMTHより大であるか否かを判別する(ステップS36)。上限閾値QCAPLMTHは、回生による充電可能な例えば、蓄電器6の満充電電圧の90%程度に設定しても良く、蓄電器6の容量によって適宜設定可能である。QCAP≧QCAPLMTHならば、ステップS33に進んで回生量REGENを0とする。一方、QCAP<QCAPLMTHならば、ブレーキスイッチ45のオンオフを読み取ってブレーキペダルが操作されたブレーキ状態であるか否かを判別する(ステップS37)。ブレーキスイッチ45がオフのため非ブレーキ状態である場合には、回生量REGENを第1減速時REGENマップからマップ検索して求める(ステップS38)。また、ブレーキスイッチ45がオンのためブレーキ状態である場合には、回生量REGENを第2減速時REGENマップからマップ検索して求める(ステップS39)。ROM33には、図9に示すように、エンジン回転数Neと吸気管内圧PBとに応じて定まる非ブレーキ時の回生量REGENがREGEN#n11〜REGEN#n2010のように第1減速時REGENデータマップとして予め書き込まれ、また図10に示すように、エンジン回転数Neと吸気管内圧PBとに応じて定まるブレーキ時の回生量REGENがREGENBR#n11〜REGENBR#n2010のように第2減速時REGENデータマップとして予め書き込まれている。よって、そのときのエンジン回転数Neと吸気管内圧PBとに対応する回生量REGENを第1又は第2減速時REGENデータマップから検索することができる。なお、図9及び図10のデータマップにおいては、エンジン回転数Neが大きいほど、更に吸気管内圧PBが大きいほど回生量REGENが大きくなり、ブレーキオフ時の第1減速時REGENデータマップよりブレーキオン時の第2減速時REGENデータマップの方が回生量REGENが大きくなる。
【0034】
CPU31は、モータ制御ルーチンとは別に例えば、10msec毎にトルク制御ルーチンを処理する。このトルク制御ルーチンにおいては、図11及び図12に示すように、先ず、リーン燃焼トルク補正中フラグFLEANが1であるか否かを判別する(ステップS41)。FLEAN=0ならば、ストイキ燃焼トルク補正中フラグFSTが1であるか否かを判別する(ステップS42)。FST=0ならば、ストイキ燃焼制御時のエンジン1の出力トルクTrqSTとリーン燃焼制御時のエンジン1の出力トルクTrqLeanとのトルク差ΔTrqを推定する(ステップS43)。ROM33には、図13に示すように、エンジン回転数Neと吸気管内圧PBとに応じて推定されるストイキ燃焼制御時の出力トルクTrqSTがTrqST#n11〜TrqST#n2010の如くストイキトルクデータマップとして書き込まれ、また、図示しないが、同様に、エンジン回転数Neと吸気管内圧PBとに応じて推定されるリーン燃焼制御時の出力トルクTrqLeanがTrqLean#n11〜TrqLean#n2010の如くリーントルクデータマップとして書き込まれ、更にはエンジン回転数Neと吸気管内圧PBとに応じて推定されるリッチ燃焼制御時の出力トルクTrqRichがTrqRich#n11〜TrqRich#n2010の如くリッチトルクデータマップとして書き込まれている。各トルクデータマップの推定トルクはエンジン回転数Neが大きいほど、また吸気管内圧PBが大きいほど大きくなり、また、リーンからリッチになるほど推定トルクは大きくなる。ステップS43においてはそのときのエンジン回転数Neと吸気管内圧PBとに対応する出力トルクTrqST及びTrqLeanがストイキトルクデータマップ及びリーントルクデータマップから各々検索される。その検索結果として得られた出力トルクTrqST及びTrqLeanの差が推定トルク差ΔTrqとして算出される。
【0035】
CPU31はステップS43の実行後、前回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御であるか否かを判別する(ステップS44)。これは、現在の燃焼制御がリッチ燃焼制御、ストイキ燃焼制御及びリーン燃焼制御のいずれであるかを示す情報信号をENGECU12から得ることができるので、その情報信号の内容から判断される。例えば、上記の燃料噴射制御ルーチンでは現在の燃焼制御がリッチ燃焼制御、ストイキ燃焼制御及びリーン燃焼制御のいずれであるかは目標空燃比から分かるので、燃料噴射制御ルーチンの処理中に情報信号をCPU31に出力することができる。CPU31は前回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御であるならば、今回の燃焼制御がリーン燃焼制御であるか否かを判別する(ステップS45)。前回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御であって、今回もリッチ燃焼制御又はストイキ燃焼制御である場合には、本ルーチンを終了する。
【0036】
一方、前回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御であって、今回がリーン燃焼制御である場合には、空燃比のリーン側への急変時であるので、リーン燃焼トルク補正中フラグFLEANをセットして1に等しくさせ(ステップS46)、推定トルク差ΔTrqに対応するアシスト量ASTPWRを設定する(ステップS47)。推定トルク差ΔTrqとアシスト量ASTPWRとの関係においては図14に示すよう推定トルク差ΔTrqが大なるほどアシスト量ASTPWRが大きくなる。このような関係がデータマップとしてROM33に予め書き込まれているので、CPU31は推定トルク差ΔTrqに対応するアシスト量ASTPWRをそのデータマップから検索して求め、そのアシスト量ASTPWRを出力インターフェース回路36に対して出力する(ステップS48)。
【0037】
ステップS41においてFLEAN=1と判別した場合にはリーン燃焼制御への変化直後の出力トルク補正中であるので、アシスト量ASTPWRを所定量だけ減少させ(ステップS49)、そのアシスト量ASTPWRが0になったか否かを判別する(ステップS50)。ASTPWR>0ならば、ステップS48に進み、ASTPWR=0ならば、リーン燃焼トルク補正中フラグFLEANをリセットして0に等しくさせ(ステップS51)、本ルーチンを終了する。
【0038】
このように設定されたアシスト量ASTPWRに応じたアシスト電力がモータ2にPDU5から供給され、モータ2はエンジン1の出力トルクの低下分を補助するように駆動される電動機として作動する。また、そのアシスト量ASTPWRは徐々に減少するので、モータ2によるエンジン1の出力トルク補助量も図15に示すように徐々に減少する。アシスト量ASTPWRの減少量及びその減少時間は適宜設定することができるが、減少量は一定値でも良い。
【0039】
CPU31はステップS44の判別において前回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御ではなくリーン燃焼制御であると判別したならば、今回の燃焼制御がリッチ燃焼制御又はストイキ燃焼制御であるか否かを判別する(ステップS52)。前回の燃焼制御がリーン燃焼制御であって、今回もリーン燃焼制御である場合には本ルーチンを終了する。
【0040】
一方、前回の燃焼制御がリーン燃焼制御であって、今回がリッチ燃焼制御又はストイキ燃焼制御である場合には、空燃比のリーン側からリッチ側への急変時であるので、ストイキ燃焼トルク補正中フラグFSTをセットして1に等しくさせ(ステップS53)、推定トルク差ΔTrqに対応する回生量REGENを設定する(ステップS54)。推定トルク差ΔTrqと回生量REGENとの関係は図14に示した推定トルク差ΔTrqとアシスト量ASTPWRとの関係と同様に推定トルク差ΔTrqが大なるほど回生量REGENが大きくなる。このような関係がデータマップとしてROM33に予め書き込まれているので、CPU31は推定トルク差ΔTrqに対応する回生量REGENをそのデータマップから検索して求め、その回生量REGENを出力インターフェース回路36に対して出力する(ステップS55)。
【0041】
ステップS42においてFST=1と判別した場合にはストイキ燃焼制御への変化直後の出力トルク補正中であるので、回生量REGENを所定量だけ減少させ(ステップS56)、その回生量REGENが0になったか否かを判別する(ステップS57)。REGEN>0ならば、ステップS55に進み、REGEN=0ならば、ストイキ燃焼トルク補正中フラグFSTをリセットして0に等しくさせ(ステップS58)、本ルーチンを終了する。
【0042】
このように設定された回生量REGENに応じた回生電力をPDU5はモータ2から得るように動作し、モータ2はエンジン1の出力トルクの上昇分を低下させるように回生動作する発電機として作動する。また、その回生量REGENは徐々に減少するので、モータ2によるエンジン1の出力トルク低下量も図15に示すように徐々に減少する。回生量REGENの減少量及びその減少時間は適宜設定することができるが、減少量は一定値でも良い。
【0043】
上記の燃料噴射制御ルーチンにおいては、内燃エンジン1の加速時の増量時で一時的にリッチ燃焼制御となり、クルーズ走行や低負荷の場合にリーン燃焼制御、その他通常はストイキ燃焼制御となるので、理論空燃比より小さいリッチの空燃比(理論空燃比に対して燃料過多の状態)からリーン側への空燃比の変化時には、電動機及び発電機各々でモータを制御することが生じることになる。
【0044】
なお、リーン燃焼トルク補正中フラグFLEAN又はストイキ燃焼トルク補正中フラグFSTがセットされて1に等しいときには、上記のモータ制御ルーチンの処理が停止される。また、リーン燃焼トルク補正中フラグFLEAN及びストイキ燃焼トルク補正中フラグFSTの各初期値は0である。
上記した実施例においては、供給混合気の空燃比がリーンに制御されるリーン燃焼制御、理論空燃比に制御されるストイキ燃焼制御及びリッチに制御されるリッチ燃焼制御のいずれか一方を選択的に行なう制御装置に本発明を適用した場合について説明したが、空燃比が単にリーン側に又はリッチ側に大きく急変する場合にも本発明を適用することができる。
【0045】
また、上記した実施例においては、理論空燃比よりリッチの空燃比又は理論空燃比から理論空燃比よりリーンの空燃比に変化した場合に、モータ2は電動機として作動し、理論空燃比よりリーンの空燃比から理論空燃比よりリッチの空燃比又は理論空燃比に変化した場合に、モータ2は発電機として作動するようになっているが、これに限らず、空燃比がリーン方向に単に変化した場合にモータ2を電動機として作動させ、空燃比がリッチ方向に単に変化した場合にモータ2を発電機として作動させても良い。例えば、空燃比が理論空燃比よりリッチの領域内でリーン方向に変化した場合にモータ2を電動機として作動させても良く、また、空燃比が理論空燃比よりリッチの領域内で更にリッチ方向に変化した場合にモータ2を発電機として作動させても良いのである。更に、空燃比が理論空燃比よりリーンの領域内で更にリーン方向に変化した場合にモータ2を電動機として作動させても良く、また、空燃比が理論空燃比よりリーンの領域内でリッチ方向に変化した場合にモータ2を発電機として作動させても良いのである。このように空燃比がリーン方向に又はリッチ方向に変化する際においては、電動機として作動する時には電動機の駆動力を徐々に減少させ、発電機として作動する時には発電機の回生制動力を徐々に減少させることが行なわれる。
【0046】
上記した実施例で用いた図7、図9及び図10においては、エンジン回転数、吸気負圧が大きくなるほどモータ2のアシスト量、回生量が大きくなる。
なお、上記の実施例では、車両の変速機構3がマニュアル式の場合について説明したが、変速機構3がオートマティック式(無段変速機構を含む)の場合にも本発明を同様に適用することができる。ただし、オートマティック式変速機構では図7のASTPWRデータマップと図9及び図10のREGENデータマップとは例えば、エンジン回転数Neと車速Vsとに応じてアシスト量又は回生量を検索するようにしても良い。また、同様に図13のストイキトルクデータマップ並びに図示していないリッチトルクデータマップ及びリーントルクデータマップはエンジン回転数Neと車速Vsとに応じて推定出力トルクを検索するようにしても良い。
【0047】
更に、上記の実施例においては、モータ制御用のMOTECU11とエンジン制御用のENGECU12とが個別に設けられているが、単一のECUでモータ及びエンジンの両方を制御するようにしても良い。
【0048】
【発明の効果】
以上の如く、本発明のハイブリッド駆動車両の制御装置においては、例えば、ストイキ燃焼制御からリーン燃焼制御に変化したためエンジンへの供給混合気の空燃比がリーン側に変化したことが検出されたときにはその直後にエンジンの出力の補助をするために発電電動機を電動機として作動させ、また、例えば、リーン燃焼制御からストイキ燃焼制御に変化したため供給混合気の空燃比がリッチ側に変化したことが検出されたときにはその直後に回生制動のために発電電動機を発電機として作動させるので、供給混合気の空燃比の変化時のエンジンの出力トルク差を時間遅れなく十分に補償することができる。
【0049】
また、本発明のハイブリッド駆動車両の制御装置においては、車両の運転状態に応じて空燃比の変化を検出した時の内燃エンジンの出力トルク差を推定し、その推定した出力トルク差に応じて発電電動機の駆動力又は回生制動力を制御することにより、供給混合気の空燃比の変化時のエンジンの出力トルク差に対して適切なモータの駆動状態又は回生状態を得ることができる。
【0050】
更に、本発明のハイブリッド駆動車両の制御装置においては、空燃比検出手段によって空燃比がリーン側に変化したことが検出された場合に、発電電動機を電動機として作動させた後、電動機の駆動力を徐々に減少させ、空燃比検出手段によって空燃比がリッチ側に変化したことが検出された場合に、発電電動機を発電機として作動させた後、発電機の回生制動力を徐々に減少させることにより、空燃比の急変後の適切な出力トルクにトルクショックを生じることなく一致させることができる。
【図面の簡単な説明】
【図1】本発明の実施例を示すブロック図である。
【図2】図1の装置中のMOTECUの内部構成を示すブロック図である。
【図3】モータ制御ルーチンを示すフローチャートである。
【図4】図3のモータ制御ルーチンの続き部分を示すフローチャートである。
【図5】アシストトリガテーブルによる加速フラグFMASTの設定特性を示す図である。
【図6】加速モード処理を示すフローチャートである。
【図7】加速時ASTPWRデータマップを示す図である。
【図8】減速モード処理を示すフローチャートである。
【図9】第1減速時REGENデータマップを示す図である。
【図10】第2減速時REGENデータマップを示す図である。
【図11】トルク制御ルーチンを示すフローチャートである。
【図12】図12のトルク制御ルーチンの続き部分を示すフローチャートである。
【図13】ストイキトルクデータマップを示す図である。
【図14】推定トルク差とアシスト量又は回生量との関係を示す図である。
【図15】リーン燃焼制御時の出力トルク補助量の変化及びストイキ制御時の出力トルク低下量の変化を示す図である。
【符号の説明】
1 エンジン
2 モータ
3 変速機構
4 駆動輪
5 PDU
6 高電圧蓄電器
7 DV
8 低電圧蓄電器
9 低電圧負荷
11 MOTECU
12 ENGECU
13 スロットルアクチュエータ
51 吸気管
62 排気管
63 インジェクタ
64 点火装置
Claims (1)
- 車両用駆動源としての内燃エンジンと、車両用駆動源として前記内燃エンジンの出力を補助する電動機として作動し、かつ車両の走行エネルギを回生して蓄電手段を充電する発電機として作動する発電電動機とを備えたハイブリッド駆動車両の制御装置であって、前記エンジンに供給される混合気の空燃比の変化を検出する空燃比検出手段と、前記空燃比検出手段によって空燃比がリッチ側からリーン側に変化したことを検出した場合には前記発電電動機を電動機として作動させ、空燃比がリーン側からリッチ側に変化したことを検出した場合には前記発電電動機を発電機として作動させる発電電動機制御手段と、を備え、
前記発電電動機制御手段は、前記車両の運転状態に応じて空燃比の変化を検出した時の前記内燃エンジンの出力トルク差を推定し、前記発電電動機が電動機として作動するときにはその推定した出力トルク差に応じてその電動機の駆動力を制御し、その後、前記電動機の駆動力を徐々に減少させ、前記発電電動機が発電機として作動するときには、前記推定した出力トルク差に応じてその発電機の回生制動力を制御し、その後、前記発電機の回生制動力を徐々に減少させることを特徴とするハイブリッド駆動車両の制御装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17357598A JP3699592B2 (ja) | 1998-06-19 | 1998-06-19 | ハイブリッド駆動車両の制御装置 |
| DE69923049T DE69923049T2 (de) | 1998-06-19 | 1999-04-02 | Steuerungsvorrichtung für einen hybridgetriebenen kraftwagen |
| CA002297007A CA2297007C (en) | 1998-06-19 | 1999-04-02 | Apparatus for controlling hybrid vehicle |
| US09/446,909 US6390214B1 (en) | 1998-06-19 | 1999-04-02 | Control device of hybrid drive vehicle |
| KR1020007001119A KR100325483B1 (ko) | 1998-06-19 | 1999-04-02 | 하이브리드 구동차량의 제어장치 |
| PCT/JP1999/001752 WO1999066184A1 (fr) | 1998-06-19 | 1999-04-02 | Dispositif de commande de vehicule a entrainement hybride |
| EP99910823A EP1004761B1 (en) | 1998-06-19 | 1999-04-02 | Control device of hybrid drive vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17357598A JP3699592B2 (ja) | 1998-06-19 | 1998-06-19 | ハイブリッド駆動車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000008904A JP2000008904A (ja) | 2000-01-11 |
| JP3699592B2 true JP3699592B2 (ja) | 2005-09-28 |
Family
ID=15963116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP17357598A Expired - Fee Related JP3699592B2 (ja) | 1998-06-19 | 1998-06-19 | ハイブリッド駆動車両の制御装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6390214B1 (ja) |
| EP (1) | EP1004761B1 (ja) |
| JP (1) | JP3699592B2 (ja) |
| KR (1) | KR100325483B1 (ja) |
| CA (1) | CA2297007C (ja) |
| DE (1) | DE69923049T2 (ja) |
| WO (1) | WO1999066184A1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4269517B2 (ja) * | 1998-03-19 | 2009-05-27 | 株式会社日立製作所 | ハイブリッド自動車及びそのシステム並びに制御装置及び制御方法 |
| FR2798785B1 (fr) * | 1999-09-22 | 2006-05-26 | Peugeot Citroen Automobiles Sa | Systeme de gestion de l'energie electrique dans un vehicule hybride parallele pourvu d'une batterie de puissance et d'une batterie de servitude |
| JP3702749B2 (ja) * | 2000-05-24 | 2005-10-05 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| JP2001342878A (ja) * | 2000-06-02 | 2001-12-14 | Toyota Motor Corp | 内燃機関の制御装置 |
| US6912889B2 (en) * | 2001-02-19 | 2005-07-05 | Rosemount Analytical Inc. | Generator monitoring, control and efficiency |
| EP1270933A1 (de) * | 2001-06-29 | 2003-01-02 | Ford Global Technologies, Inc., A subsidiary of Ford Motor Company | Verfahren zur Kontrolle der Drehmomentabgabe eines Anlassers |
| US6659727B2 (en) * | 2001-09-07 | 2003-12-09 | General Motors Corporation | Control method for a dual mode compressor drive system |
| DE10352799A1 (de) | 2003-11-12 | 2005-06-23 | Robert Bosch Gmbh | Geschwindigkeitsregler für Kraftfahrzeuge |
| US7047745B1 (en) * | 2005-01-18 | 2006-05-23 | Yasuhito Yaoita | Method for operating a hybrid engine |
| JP4424321B2 (ja) * | 2006-03-15 | 2010-03-03 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| US8348804B2 (en) * | 2008-01-18 | 2013-01-08 | Caterpillar Inc. | Hybrid engine system with transient load assistance |
| JP5063475B2 (ja) * | 2008-05-13 | 2012-10-31 | 本田技研工業株式会社 | クラッチ制御装置 |
| JP5011573B2 (ja) * | 2008-05-13 | 2012-08-29 | 本田技研工業株式会社 | クラッチ制御装置 |
| DE102010039041A1 (de) * | 2010-08-09 | 2012-02-09 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Bordnetzes, Steuerung und Computerprogrammprodukt |
| JP5659748B2 (ja) * | 2010-12-03 | 2015-01-28 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102011075216A1 (de) * | 2011-05-04 | 2012-11-08 | Robert Bosch Gmbh | Verfahren zum Starten einer Verbrennungskraftmaschine eines Hybridantriebs und Steuereinheit zum Starten einer Verbrennungskraftmaschine |
| JP2013230718A (ja) * | 2012-04-27 | 2013-11-14 | Mazda Motor Corp | 内燃機関の排気ガス浄化装置及び制御方法 |
| GB2504351A (en) * | 2012-07-27 | 2014-01-29 | Gm Global Tech Operations Inc | Method of controlling hybrid powertrain having an engine operating under rich combustion |
| US9664104B2 (en) | 2012-10-30 | 2017-05-30 | Ford Global Technologies, Llc | Condensation control in a charge air cooler by controlling charge air cooler temperature |
| CN104918834B (zh) * | 2013-01-24 | 2017-07-07 | 丰田自动车株式会社 | 混合动力车辆的控制装置 |
| JP6171917B2 (ja) * | 2013-12-18 | 2017-08-02 | 株式会社デンソー | エンジン始動装置 |
| JP2015183547A (ja) * | 2014-03-20 | 2015-10-22 | ヤンマー株式会社 | エンジン装置 |
| EP3264560B1 (en) * | 2015-02-24 | 2019-12-04 | Beijing Samevolt Co., Ltd. | Smart battery, electric energy allocation bus system and battery charging and discharging method |
| WO2019073561A1 (ja) * | 2017-10-12 | 2019-04-18 | 日産自動車株式会社 | ハイブリッド車両の制御方法および制御装置 |
| JP7027937B2 (ja) * | 2018-02-16 | 2022-03-02 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP7239880B2 (ja) * | 2019-05-30 | 2023-03-15 | マツダ株式会社 | 車両システム |
| KR102250318B1 (ko) * | 2020-11-11 | 2021-05-11 | 비테스코 테크놀로지스 게엠베하 | 하이브리드 차량의 린번엔진 제어 장치 및 방법 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6161926A (ja) * | 1984-08-31 | 1986-03-29 | Mazda Motor Corp | エンジンのトルク変動制御装置 |
| JPH03121928A (ja) | 1989-10-03 | 1991-05-23 | Hino Motors Ltd | ハイブリッドエンジン |
| JP3000804B2 (ja) * | 1992-10-21 | 2000-01-17 | 日産自動車株式会社 | ハイブリッド型電気自動車 |
| JP2738819B2 (ja) * | 1994-08-22 | 1998-04-08 | 本田技研工業株式会社 | ハイブリッド車両の発電制御装置 |
| JP3534271B2 (ja) * | 1995-04-20 | 2004-06-07 | 株式会社エクォス・リサーチ | ハイブリッド車両 |
| JP3414097B2 (ja) * | 1995-11-22 | 2003-06-09 | 株式会社デンソー | 車両用動力源制御装置ならびに自動車 |
| JP3453976B2 (ja) * | 1995-12-27 | 2003-10-06 | トヨタ自動車株式会社 | 車両用制御装置 |
| JP3286517B2 (ja) * | 1996-01-12 | 2002-05-27 | 本田技研工業株式会社 | リーンバーンエンジンを搭載した車両の制御装置 |
| JP3610672B2 (ja) * | 1996-04-02 | 2005-01-19 | トヨタ自動車株式会社 | 内燃機関の燃料性状検出装置 |
| JP3177153B2 (ja) * | 1996-04-10 | 2001-06-18 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3661071B2 (ja) * | 1996-04-10 | 2005-06-15 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3219006B2 (ja) * | 1997-01-29 | 2001-10-15 | トヨタ自動車株式会社 | 動力出力装置 |
| JPH10246132A (ja) * | 1997-03-03 | 1998-09-14 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP3096447B2 (ja) * | 1997-09-17 | 2000-10-10 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3478723B2 (ja) * | 1998-02-03 | 2003-12-15 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
-
1998
- 1998-06-19 JP JP17357598A patent/JP3699592B2/ja not_active Expired - Fee Related
-
1999
- 1999-04-02 DE DE69923049T patent/DE69923049T2/de not_active Expired - Lifetime
- 1999-04-02 KR KR1020007001119A patent/KR100325483B1/ko not_active IP Right Cessation
- 1999-04-02 EP EP99910823A patent/EP1004761B1/en not_active Expired - Lifetime
- 1999-04-02 WO PCT/JP1999/001752 patent/WO1999066184A1/ja active IP Right Grant
- 1999-04-02 CA CA002297007A patent/CA2297007C/en not_active Expired - Fee Related
- 1999-04-02 US US09/446,909 patent/US6390214B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE69923049T2 (de) | 2005-12-08 |
| KR20010022530A (ko) | 2001-03-15 |
| JP2000008904A (ja) | 2000-01-11 |
| CA2297007C (en) | 2003-11-25 |
| EP1004761B1 (en) | 2005-01-05 |
| EP1004761A4 (en) | 2001-12-19 |
| US6390214B1 (en) | 2002-05-21 |
| KR100325483B1 (ko) | 2002-03-06 |
| CA2297007A1 (en) | 1999-12-23 |
| WO1999066184A1 (fr) | 1999-12-23 |
| EP1004761A1 (en) | 2000-05-31 |
| DE69923049D1 (de) | 2005-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3699592B2 (ja) | ハイブリッド駆動車両の制御装置 | |
| US6234932B1 (en) | Control apparatus for a hybrid vehicle | |
| US5942879A (en) | Control system for hybrid vehicles | |
| KR100289291B1 (ko) | 하이브리드 차량의 제어장치 | |
| JP3847438B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2857666B2 (ja) | ハイブリッド車両の制御装置 | |
| EP0570234B1 (en) | Operating method for a hybrid car | |
| US6424053B1 (en) | Control apparatus for hybrid vehicle | |
| US6550557B2 (en) | Control apparatus for hybrid vehicle | |
| US20030051930A1 (en) | Control system and method for hybrid vehicle | |
| US6570266B1 (en) | Control apparatus for hybrid vehicle | |
| US6641501B2 (en) | Control apparatus for hybrid vehicle | |
| US6717378B2 (en) | Motor output control system and method for hybrid vehicle | |
| JP3742506B2 (ja) | ハイブリッド駆動車両の制御装置 | |
| JP3216076B2 (ja) | ハイブリッド車両の制御装置 | |
| JP3857423B2 (ja) | ハイブリッド駆動車両の制御装置 | |
| JP3380728B2 (ja) | ハイブリッド車両の制御装置 | |
| JP3675627B2 (ja) | ハイブリッド車両の制御装置 | |
| WO2023007532A1 (ja) | 車両の制御方法及び車両の制御装置 | |
| JP3575763B2 (ja) | ハイブリッド車両の制御装置 | |
| JPH08237809A (ja) | 内燃機関のトルク制御装置 | |
| JPH10311236A (ja) | 内燃機関の吸入空気量制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050708 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080715 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090715 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100715 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100715 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110715 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110715 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120715 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120715 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130715 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |