JP3670004B2 - 繊維機械の糸のための制御装置 - Google Patents
繊維機械の糸のための制御装置 Download PDFInfo
- Publication number
- JP3670004B2 JP3670004B2 JP50948294A JP50948294A JP3670004B2 JP 3670004 B2 JP3670004 B2 JP 3670004B2 JP 50948294 A JP50948294 A JP 50948294A JP 50948294 A JP50948294 A JP 50948294A JP 3670004 B2 JP3670004 B2 JP 3670004B2
- Authority
- JP
- Japan
- Prior art keywords
- control device
- coupling
- control
- pulling mechanism
- connecting pin
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000004753 textile Substances 0.000 title claims description 6
- 230000007246 mechanism Effects 0.000 claims description 68
- 230000008878 coupling Effects 0.000 claims description 38
- 238000010168 coupling process Methods 0.000 claims description 38
- 238000005859 coupling reaction Methods 0.000 claims description 38
- 238000009940 knitting Methods 0.000 claims description 3
- 230000007935 neutral effect Effects 0.000 claims description 2
- 239000000470 constituent Substances 0.000 claims 1
- 239000004020 conductor Substances 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000036316 preload Effects 0.000 description 2
- 239000002759 woven fabric Substances 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000009941 weaving Methods 0.000 description 1
Images






Classifications
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03C—SHEDDING MECHANISMS; PATTERN CARDS OR CHAINS; PUNCHING OF CARDS; DESIGNING PATTERNS
- D03C3/00—Jacquards
- D03C3/20—Electrically-operated jacquards
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03C—SHEDDING MECHANISMS; PATTERN CARDS OR CHAINS; PUNCHING OF CARDS; DESIGNING PATTERNS
- D03C13/00—Shedding mechanisms not otherwise provided for
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Knitting Machines (AREA)
- Looms (AREA)
Description
本発明は請求項1の上位概念に記載の繊維機械の糸のための制御装置に関する。この種の制御装置は例えば織機または編機のジャカード機又はドビー機のための糸制御のために適している。
従来技術
繊維機械の糸のための数多くの制御装置が公知であり、例えばDE−OS2130502号によれば繊維機械用のジャカード機で使用される冒頭に述べた形式の制御装置が記載されている。このジャカード機は多数の引っ張り装置と、文様通りに選ばれた引っ張り装置の昇降のための持ち上げ装置とを備えている。文様通りの引っ張り装置の選択のために連結装置が役立てられる。圧電的な制御素子がこの連結装置を制御している。この場合の欠点とするところは、装置が著しく複雑に構成されており、圧電的な制御素子が、結合を生じる固有の駆動装置を制御する補助機構にすぎないことにある。さらに、連結装置の運転状態を監視することも不可能である。
本発明の説明
本発明の課題は上述の欠点が排除されるように冒頭に述べた制御装置を構成することにある。
この課題を解決した本発明の構成は請求項1の特徴概念に記載された通りである。2つの圧電的な制御素子が交互にアクチュエータとしてまたセンサとして作動し連結ピンを中立位置と連結位置との間で往復運動せしめることにより、まず、著しく簡単な装置が実現される。その理由は圧電的な制御素子が直接に連結ピンの制御と駆動とに役立てられ、付加的な駆動手段を要しないからである。
圧電的な制御素子は交互にアクチュエータとしてばかりでなくセンサとしても作動するため、切り換え状態の監視にも役立つ。これにより、構造が極めて簡単であるとともに制御が最も簡単で確実性が最大の制御装置が実現される。
制御装置の有利な構成が請求項2から請求項13までに記載されている。
請求項2によれば、引っ張り機構の最も簡単な構成並びに連結ピンとこの引っ張り機構との協働が記載されている。請求項3に記載の構成は特に有利である。それというのは、長手スリットと連結ピンの狭い案内部分とにより、連結ピンが常時引っ張り機構と係合を保ち、これにより、引っ張り機構の案内に役立つことができるからである。さらに連結ピンと引っ張り機構との係止も、長手スリット内に組み込まれた少なくとも1つの連結切欠により改善される。連結ピンを片側から支承させることが基本的に可能であり、従って例えば、狭い案内部分が片持式に引っ張り機構へ向けて突出する。それに応じて、制御素子をも引っ張り機構に関して片側に配置することができる。しかし請求項4に基づく構成が特に有利であり、これによれば、特に、連結ピンの運転と摩耗の少ない配置が得られ、さらに、連結ピンに対する制御素子の対応が簡単である。最も簡単な場合には、引っ張り機構が連結ピンの係合のための連結切欠を備える、しかし、請求項5によれば、複数の個々の連結ピンのために種々の切り換え位置を補償し又は複数の連結ピンの交互の係合を可能ならしめるために2つ又はそれより多くの連結切欠を設けることができる。
請求項6によれば、制御装置の有利な構成が記載されており、これによれば、引っ張り機構が、案内すべき糸に直接的に、要するになんら結合手段を介さずに結合されている。
請求項7によれば、場合により複数の糸が同時に操作されなければならない場合、引っ張り機構が結合手段を介して複数の糸に結合されることができる。
請求項8によれば、二重持ち上げ原理に基づき少なくとも1本の糸の制御のための制御装置の構成が記載されている。
請求項9によれば、連結ピンと制御素子とが定置に配置されており、持ち上げ装置例えばナイフ装置により昇降される引っ張り機構の文様通りの係止のために役立てられる。
請求項10に基づく制御装置の有利なさらに別の構成によれば、連結ピンと制御素子とが持ち上げ装置の構成部分として、従って昇降可能に形成されている。
特に有利に請求項11に基づく別の構成によれば、連結ピンとその制御素子とが二重持ち上げ原理に基づいて作動する持ち上げ装置の部分である。
請求項12に基づく制御装置の構成によれば、最も簡単な構造にもかかわらず、同種のユニットとの組み合わせにより、多数の糸のための制御装置の構成が可能となる。
すでに述べたように、本制御装置は複数の各糸の制御、例えば緯入れの制御のためにも構成されることができる。
しかし請求項13に基づく構成は特に有利である。これによれば、複数の引っ張り機構と、それに属する連結ピン及び制御素子とが、織機又は編機のためのジャカード機又はドヒー機として統合される。
【図面の簡単な説明】
次に本発明の実施例を図面について説明するが、図中
第1図は織機の経糸の制御のための制御装置を示し、部分的に断面されており、略示図であり、かつ経糸の長手方向に対して直角に見た図である。
第2図は第1図のII−II線に沿って断面した制御装置を示す。
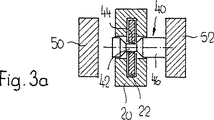
第3図のa,b,cは第1図の制御装置の機能を種々異なる制御位置で示す略示図である。
第4図は2つの引っ張り機構を備えた制御装置を織機の経糸の制御のために二重持ち上げ原理で示す図であって第1図に基づく装置と同様に経糸の長手方向に対して直角に示したものである。
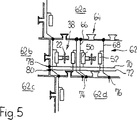
第5図は引っ張り機構、配列された連結ピン及び電気的な制御機構を群状に配列して略示した図である。
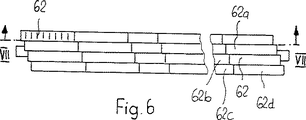
第6図はモジュラー状に組み込まれた複数の制御装置から成る制御機械を上から見た図である。
第7図は第6図に示した制御機械を第6図のVII−VII線に沿って略示した図である。
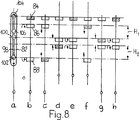
第8図は第6図及び第7図に基づく装置の作動を略示した図である。
実施例
第1図、第2図、第3図のa,b,cは本発明に基づく制御装置2を織機で使用した第1実施例を示す。
略示した織機は経糸6を含み、この経糸6は開いた開口8の形成のために制御装置2により上位置6a又は下位置6bにもたらされる。開いた開口8を通して緯糸10が導入されて、筬12により当接縁14に打ち当てられる。このようにして形成された織布16は織布引っ張り装置18を介して引き出される。
制御装置2は定置のブロック20を備えており、このブロック20内に引っ張り機構22が昇降可能に案内されている。積層状に形成された引っ張り機構22は下端部で結合部材、例えば引っ張りロープを介して綜絖26に結合されており、綜絖26は綜絖アイ28を備えており、この綜絖アイを通して経糸が案内される。戻し引張ばね30により綜絖26ひいては引っ張り機構22は下向きにプレロードをかけられている。積層状の綜絖の両側に配置された持ち上げナイフ34を備えた持ち上げ装置32は引っ張り機構22に配置された駆動カム36と協働している。この持ち上げ装置32及び持ち上げナイフ34の構成及び駆動形式は従来公知であり、それゆえ、これらについての詳細な説明は省略する。引っ張り機構22は戻し引張ばね30により下向きプレロードを負荷させており、換言すれば経糸6の下位置6b内にある。経糸6を上位置6aにもたらして保持するために、持ち上げナイフ34は引っ張り機構22を、経糸6の上位置6aに達するまで駆動カム36を介して持ち上げる。引っ張り機構22を持ち上げた位置に保持するか又は解放するために連結装置38が役立っており、これにより、解放状態では引っ張り機構22は戻し引張ばねの影響下で持ち上げナイフの降下時にこの持ち上げナイフに追従することができる。
連結装置38は引っ張り機構22の両側にブロック内で往復運動可能に支承された連結ピン40を備えている。この連結ピン40は狭い案内部分42を有しており、この案内部分は引っ張り機構の長手スリット44内に係合しており、かつ引っ張り機構の昇降運動と引っ張り機構の案内とを可能ならしめている。さらに、連結ピンは幅広の連結部分46を備えており、この連結部分は引っ張り機構の連結切欠48内に係合することができ、かつこの位置で引っ張り機構を経糸6の上位置に対応する位置に保持することができる。
連結ピンの往復運動、換言すれば連結ピンの制御のために2つの圧電的な制御素子50,52が役立てられており、これら圧電的な制御素子は連結ピンの両側でブロック20に配置されており、かつ連結ピンの端部と協働している。圧電的な制御素子50,52は交互にアクチュエータ及びセンサとして作動する。
連結ピン及び制御素子50,52の機能を第1図並びに特に略示的な第3図のa、第3図のb及び第3図のcにつきさらに詳しく説明する。制御素子50.52の無通電時に連結ピン40は第3図のaに示す位置をしめる。この位置では略示した案内部分42は引っ張り機構22の長手スリット44内に係合する。連結ピンはその際制御素子50に当接してこの制御素子に若干の圧力を加える。これによりこの制御素子はセンサとして作動して電流パルスを図示しない電子制御装置に印加し、これにより連結ピンの現在位置を表示する。連結ピンの切り換えのために一方の制御素子、例えば右側の制御素子52が通電される。これにより、圧電的な制御素子が湾曲して連結ピンを右側の位置から左側の位置へ移動せしめ、これにより、連結ピンの幅広の連結部分46が引っ張り機構22の連結切欠48内に係合して、引っ張り機構のそれ以上の運動を阻止する。この制御過程時に連結ピンは第3図のbに示したように他方の制御素子50を押圧して制御電流を生じる。この制御電流は詳細に図示しない電子制御装置を介して連結ピンの現在位置を表示する。引っ張り機構22を上位置でロックしている連結ピンの位置は第3図のcに示すように、別の制御パルスが左側の制御素子50を作動させて連結ピンを出発位置へ押し戻すまで継続する。この出発位置では狭い案内部分33が再び引っ張り機構の長手スリット44と協働する。要するに圧電的な制御素子50,52は交互に、一方で連結ピンの移動を生じるアクチュエータとして、かつ他方では連結ピンの正しい現在位置を電子制御装置を介して示すセンサとして作動する。
第4図は二重持ち上げ装置での例における制御装置の別の実施例を示す。この制御装置は例えばUS−PS3835894号明細書に開示されている。この制御装置では2つの引っ張り機構22a,22bと、互いに反対に作用する2対の持ち上げナイフ34a,34bを備えた1つの持ち上げ機構とが設けられている。引っ張り機構22a,22bは結合ロープ54を介して互いに結合されており、結合ロープは偏向ローラ56を介して案内されている。偏向ローラ56の軸58には軸受けフオーク60が配置されており、この軸受けフオークにはフレキシブルな結合部材24が固定されており、この固定部材は綜絖26ひいては経糸6への結合を生じる。二重持ち上げ機構の機能は公知であり、制御は第1図から第3図のcで説明したと同様におこなわれる。
第5図から判るように、単数又は複数の連結装置38及びそれに対応する引っ張り機構22を1つのモジュラー状のユニット62内に統合することができる。これらは結合部材64例えばありみぞ結合部を介して対応するモジュラー状のユニット62,62a,62b,62c,62dに結合されることができる。各制御素子50,52は導線66,68若しくは70,72に接続されており、この導線はコンタクトに結合されており、コンタクトは対応するコンタクトに接続されたモジュラー状のユニット62,62a,62b,62c,62dと協働している。導線66,68,70,72は制御素子50,52の制御のための1つのマトリックスを形成している。
第6図から第8図までは水平に制御装置のモジュラー状のユニットから構成された制御機械を示す。垂直方向では定置の1つの連結装置84と持ち上げ装置の一部である2つの昇降可能な連結装置86,88とが引っ張り機構82に対応して配置されている。定置の連結装置84の列はこれにより定置のナイフ90を形成しており、第1の運動可能な連結装置86の列は行程H1を有する上方の持ち上げナイフを形成しておりかつ第2の運動可能な連結装置88は行程H2を有する下方の持ち上げナイフ94を形成している。持ち上げ装置96の上方の持ち上げナイフ92及び下方の持ち上げナイフ94は互いに反対の位相で作動する。引っ張り機構82は長手スリット98の他に連結切欠100,102,104を備えており、これらはそれぞれ持ち上げナイフ92,94の最下方の位置若しくは定置の持ち上げナイフ90に対応するように位置している。さらに、引っ張り機構82は第4の連結切欠106を備えており、この連結切欠は第8図から判るように、引っ張り機構の持ち上げられた位置で定置の連結ナイフの連結装置と協働する。第8図ではそれぞれ作動させられた連結装置が斜線で示されている。
第8図のaは引っ張り機構82の基本位置を示し、この位置では引っ張り機構が詳細には図示しない戻し引張ばねにより下位置に保持される。第8図のbに示す駆動状態では定置の持ち上げナイフ90の連結装置84が作動して引っ張り機構を下位置に保持し、その間上方の持ち上げナイフ及び下方の持ち上げナイフが互いに離反方向へ運動して最も離れた位置に達する。第8図のcによれば、定置の持ち上げナイフの定置の連結装置84が解離されて下方の持ち上げナイフ94の連結装置88を作動させる。次いで持ち上げナイフ92,94が互いに反対方向に運動し始め、最終的には第8図のdに示した位置に達する。それに次いで、下方の持ち上げナイフ94の連結装置88が解離されて、第8図のeに示したように定置の持ち上げナイフの定置の連結装置を作動し、その結果、引っ張り機構は上開口位置に位置する。上方の持ち上げナイフ92及び下方の持ち上げナイフ94は互いに離反方向に第9図のfに示す位置へ運動し、この位置で定置の持ち上げナイフ90の定置の連結装置が解離されかつ引っ張り機構が上方の持ち上げナイフ92の連結装置86に連結される。
次いで、持ち上げナイフが互いに向かい合って運動し、引っ張り機構が再び第8図のgに示す下開口位置へ降下する。その際上方の持ち上げナイフ92の連結装置86が解離され、定置の持ち上げナイフ90の定置の連結装置84が作動し、これにより、引っ張り機構が下位置で保持され、これにより持ち上げナイフ92,94が第8図のaで示すように再び互いに離反方向に運動することができる。
モジュラー状のユニット内でのナイフの水平方向の分割により、制御装置は垂直方向にも複数のブロックに分割されることができ、その場合、電気的な導線はマトリックス状に配置され、これにより、第5図から判るように、制御電子装置のための入力及び出力の数を実現可能な量まで軽減することができる。各モジュラー状のユニットが電気的なコンタクトを介して互いに接続されているので、各モジュラー状のユニット及び部分ブロックは簡単に互いに分割でき、その結果、各ユニット及び各ブロックは他のブロック又はユニットを取り外すことなく取り出すこと又は交換することができる。モジュラー状のユニットに基づき、繊維機械の幅並びに経糸の数に依存して種々のシステムを統合させることができる。
Claims (13)
- 繊維機械の糸のための制御装置であって、糸(6)に結合される引っ張り機構(22,22a,22b,82)が設けられており、この引っ張り機構が、該引っ張り機構(22,22a,22b,82)と持ち上げ装置(32,32a,96)との間の協働機能を制御するために、連結装置(38,844,86,88)と協働するようになっており、その場合、連結装置が圧電的な制御素子(50,52)により制御可能である形式のものにおいて、連結装置(38,84,86,88)が中立位置と連結位置との間で往復運動可能な連結ピン(40)を備えており、この連結ピンに2つの圧電的な制御素子(50,52)が対応して配置されており、これらの制御素子のうちの一方の制御素子(50)がアクチュエータとして作動するのに対して、他方の制御素子(52)がセンサとして作動し、逆に前記他方の制御素子(52)がアクチュエータとして作動するのに対して、前記一方の制御素子(50)がセンサとして作動することを特徴とする制御装置。
- 有利には積層状に構成された引っ張り機構(22,22a,22b,82)が連結ピン(40)の係合のための少なくとも1つの連結切欠(48,100,102,104,106)を有していることを特徴とする請求項1記載の制御装置。
- 有利には積層状に構成された引っ張り機構(22,22a,22b,82)が連結ピン(40)の狭い案内部分(42)を受容するための長手スリット(44,98)を有しており、その場合、この長手スリット(44,98)内には連結ピン(40)の広幅の連結部分を受容するための少なくとも1つの連結切欠(48,100,102,104,106)が配置されていることを特徴とする請求項1又は2記載の制御装置。
- 連結ピン(40)が引っ張り機構(22、22a、22b、82)の両側に支承されており、その場合、制御素子(50,52)が有利にはそれぞれ連結ピン(40)の一端に対応して配置されていることを特徴とする請求項3記載の制御装置。
- 引っ張り機構(82)が少なくとも2つの互いに上下に配置された連結切欠(100,102,104,106)を有していることを特徴とする請求項1から3までのいずれか1項記載の制御装置。
- 引っ張り機構が、案内すべき糸に直接に結合されていることを特徴とする請求項1から5までのいずれか1項記載の制御装置。
- 引っ張り機構(22,22a,22b,82)が結合部材(24)により、制御すべき少なくとも1つの糸(6)に結合されていることを特徴とする請求項1から5までのいずれか1項記載の制御装置。
- 互いに逆位相で駆動される2つの引っ張り機構(22a,22b)が結合ロープ(54)を介して互いに結合されており、その場合、結合ロープ(54)は偏向ローラ(56)を介して案内されており、この偏向ローラは、制御すべき少なくとも1つの糸(6)に結合されていることを特徴とする請求項1から5までのいずれか1項記載の制御装置。
- 連結装置(38,84)が定置に配置されていることを特徴とする請求項1から8までのいずれか1項記載の制御装置。
- 連結装置(86,88)が持ち上げ装置(96)の構成部材として昇降可能に形成されていることを特徴とする請求項1から8までのいずれか1項記載の制御装置。
- 引っ張り機構(82)には、定置に配置された連結装置(84)と、持ち上げ装置(96)として互いに上下に配置されて互いに逆位相の並進運動を行う2つの連結装置(86,88)とが対応して配置されており、この場合、それぞれ1つの連結切欠(100,102,104)が連結装置(84,86,88)の連結ピンに対応して引っ張り機構に配置されており、その場合、引っ張り機構(82)が別の連結切欠(106)を有しており、この連結切欠が引っ張り機構(82)の持ち上げ時に定置の連結装置(84)と協働することを特徴とする請求項10記載の制御装置。
- 少なくとも1つの引っ張り機構(22,22a,22b,82)が、モジュラー状のユニット(62,62a,62b,62c、62d)内で連結装置(38,84,86,88)と統合されており、このユニットは結合手段を介して少なくとも1つの別の同様なユニットに結合可能であることを特徴とする請求項1から11までのいずれか1項記載の制御装置。
- 複数の引っ張り機構(22,22a,22b,82)が、所属する連結装置(38,84,86,88)と共に、織機又は編機のためのジャカード機又はドビー機に統合されていることを特徴とする請求項1から12までのいずれか1項記載の制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CS19922094A CZ287575B6 (cs) | 1991-07-05 | 1992-07-03 | Polyurethanové vodné disperze a jejich použití |
| CZ2094-93 | 1992-10-09 | ||
| PCT/CH1993/000239 WO1994009197A1 (de) | 1992-07-03 | 1993-10-07 | Steuervorrichtung für einen faden einer textilmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH07502083A JPH07502083A (ja) | 1995-03-02 |
| JP3670004B2 true JP3670004B2 (ja) | 2005-07-13 |
Family
ID=5357043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP50948294A Expired - Fee Related JP3670004B2 (ja) | 1992-07-03 | 1993-10-07 | 繊維機械の糸のための制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5462097A (ja) |
| EP (1) | EP0617744B1 (ja) |
| JP (1) | JP3670004B2 (ja) |
| DE (1) | DE59309349D1 (ja) |
| WO (1) | WO1994009197A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0699787B1 (en) * | 1994-06-22 | 2000-05-24 | N.V. Michel Van de Wiele | Apparatus for the selection of shedding devices by means of bending elements |
| EP0825285A1 (de) * | 1996-08-23 | 1998-02-25 | Sulzer Rüti Ag | Anordnung zur Bildung eines Webfaches und Webmaschinen mit einer Anordnung |
| JPH09256252A (ja) * | 1996-03-19 | 1997-09-30 | Fukuhara Seiki Seisakusho:Kk | 圧電体の制御装置、およびこれを有する編みツール制御装置 |
| US5806348A (en) * | 1997-04-30 | 1998-09-15 | Cheng; Chuan-Tien | Heald rod retention device for a jacquard system |
| CN1046561C (zh) * | 1997-05-05 | 1999-11-17 | 郑川田 | 提花机综线挂持摆杆控制装置 |
| FR2772792B1 (fr) * | 1997-12-24 | 2000-01-28 | Staubli Sa Ets | Boitier de positionnement d'actionneurs electriques pour la formation de la foule et metier a tisser |
| FR2772794B1 (fr) * | 1997-12-24 | 2000-01-28 | Staubli Sa Ets | Mecanique d'armure du type jacquard et metier a tisser equipe d'une telle mecanique |
| US6371170B1 (en) * | 1998-09-23 | 2002-04-16 | Bonas Machine Company Limited | Selector |
| FR2794140B1 (fr) | 1999-05-31 | 2001-07-13 | Staubli Sa Ets | Mecanique d'armure de type jacquard et metier a tisser equipe d'une telle mecanique |
| CN1260412C (zh) * | 2000-03-27 | 2006-06-21 | 泰克斯蒂尔玛股份公司 | 提花机器 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE925279C (de) * | 1952-01-06 | 1955-03-17 | Neumag | Geschlossenfach-Schaftmaschine |
| US3828826A (en) * | 1971-06-19 | 1974-08-13 | Sulzer Ag | Jacquard mechanism |
| CH552691A (de) * | 1972-05-19 | 1974-08-15 | Sulzer Ag | Jacquardmaschine. |
| DE3301931C2 (de) * | 1982-10-26 | 1986-08-28 | Textilma Ag, Hergiswil | Einzellitzensteuervorrichtung für eine Webmaschine mit einer Fachbildevorrichtung |
| JPS6228451A (ja) * | 1985-07-24 | 1987-02-06 | 渡辺靴下工業株式会社 | 編機用選針装置 |
| SE8503794L (sv) * | 1985-08-14 | 1987-02-15 | William E N Lauritsen | Anordning for individuell styrning av oscillerande rorelser hos platiner, solv, nalar eller liknande tradforingsorgan i en snabbgaende textilmaskin |
| US4830386A (en) * | 1986-09-25 | 1989-05-16 | Atlanta Motoring Accessories, Inc. | Automobile hardtop storage rack |
| BE1000884A3 (nl) * | 1987-08-26 | 1989-05-02 | De Vree & Co J | Inrichting voor het vormen van een gaap bij weefmachines. |
| JPH0219534A (ja) * | 1988-07-01 | 1990-01-23 | Takemura Seisakusho:Kk | 昇降部材の選択保持装置 |
| JPH0694619B2 (ja) * | 1988-10-05 | 1994-11-24 | ワツクデータサービス株式会社 | 編機用選針装置 |
| US5042274A (en) * | 1989-03-15 | 1991-08-27 | Nagata Seiki Kabushiki Kaisha | Piezoelectric needle selector in a circular knitting machine |
| JPH03104957A (ja) * | 1989-09-19 | 1991-05-01 | Ikeda Kinuori Kk | 電子ジャカード機の動作検査システム |
-
1993
- 1993-10-07 WO PCT/CH1993/000239 patent/WO1994009197A1/de not_active Ceased
- 1993-10-07 JP JP50948294A patent/JP3670004B2/ja not_active Expired - Fee Related
- 1993-10-07 DE DE59309349T patent/DE59309349D1/de not_active Expired - Fee Related
- 1993-10-07 US US08/244,652 patent/US5462097A/en not_active Expired - Lifetime
- 1993-10-07 EP EP93920643A patent/EP0617744B1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE59309349D1 (de) | 1999-03-11 |
| EP0617744B1 (de) | 1999-01-27 |
| US5462097A (en) | 1995-10-31 |
| WO1994009197A1 (de) | 1994-04-28 |
| EP0617744A1 (de) | 1994-10-05 |
| JPH07502083A (ja) | 1995-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3670004B2 (ja) | 繊維機械の糸のための制御装置 | |
| US4429722A (en) | Method and apparatus for weaving fabrics of novel construction | |
| CN1066790C (zh) | 纺织机械 | |
| EP2025787A2 (en) | Crochet machine | |
| JP3969740B2 (ja) | 糸の横方向往復運動の選択的制御装置 | |
| JPH04131678U (ja) | ひ道形成装置を備えた織機に用いられる並置綾取り制御装置 | |
| TW200932971A (en) | Needle loom | |
| US3865148A (en) | Jacquard machine | |
| JP4167803B2 (ja) | 糸制御装置 | |
| CS204981B2 (en) | Apparatus for mechanical control of warp thread guides | |
| EP0439440A1 (en) | Computer controlled modular electromagnetic device for driving warp yarns for making figured fabrics | |
| EP0930385B1 (en) | Shed-forming device for weaving machines | |
| US2807283A (en) | Apparatus for weaving pile fabrics | |
| US4256149A (en) | Electromechanical filling indicator for pattern-controlled weaving loom | |
| US5676179A (en) | Electronically controlled shedding mechanism | |
| JP5326149B1 (ja) | 電子ジャカード機 | |
| EP1115928B1 (en) | Selector | |
| EP0860527B1 (en) | Electronically controlled warp selection system in looms | |
| KR20060128861A (ko) | 압전소자를 이용한 소형 자카드 선택 카드 | |
| US6941977B2 (en) | Jacquard machine | |
| US20020079012A1 (en) | Three-position-jacquard machine | |
| JP2771794B2 (ja) | 無杼織機用レノ装置 | |
| JPH02104735A (ja) | 電子ジャカード機 | |
| JPH10204744A (ja) | ドビー機 | |
| JPH01260031A (ja) | ドビー機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040203 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20040430 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20040621 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040728 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050315 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050413 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090422 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |