JP3547332B2 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- JP3547332B2 JP3547332B2 JP03297899A JP3297899A JP3547332B2 JP 3547332 B2 JP3547332 B2 JP 3547332B2 JP 03297899 A JP03297899 A JP 03297899A JP 3297899 A JP3297899 A JP 3297899A JP 3547332 B2 JP3547332 B2 JP 3547332B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- machine
- wireless device
- radio
- excavator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Operation Control Of Excavators (AREA)
- Closed-Circuit Television Systems (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Selective Calling Equipment (AREA)
Description
【発明の属する技術分野】
本発明は、遠隔操縦される建設機械に係わり、特に、急傾斜地や遠隔操縦する場所との間に高低差のある場所で作業する建設機械から送信される撮像信号に基づいて遠隔操縦される建設機械に関する。
【0002】
【従来の技術】
近年、建設機械の遠隔操縦が実用化されている。この遠隔操縦は、建設機械に搭載されたカメラによって撮像された信号を操縦側に伝送し、操縦側では受信した撮像信号を映像モニタ画面で見ながら建設機械を操縦する。従って、この遠隔操縦では、建設機械を運転するために必要な操縦信号を伝送する無線機と、撮像信号を伝送する無線機とが必要となる。
【0003】
通常、日本国内では、無線従事者が免許なしに、無線信号を伝送することのできる無線装置としては、微弱無線機、小電力無線機(SS無線機)、および50GHz帯簡易無線機の3つがある。このうち、微弱無線機は15m程度しか到達距離がなく、遠隔操縦用には適しない。また、小電力無線機(SS無線機)は電波の周波数が1波しかなく、複数の作業機械を同時に遠隔操縦する場合には対応することができない。従って、50GHz帯の簡易無線機のみが実用的に使える唯一の無線機であり、建設機械の遠隔操縦には、50GHz簡易無線機が使われる。
【0004】
この50GHz帯簡易無線機は、使用周波数帯域からmm波無線機と呼ばれ、50GHz無線機では波長が約6mmと短く、従って、この無線機は周波数が高いために高いアンテナゲインが得られるが、その反面、アンテナの指向角が鋭く、例えば、25mmのホーンアンテナでは、アンテナゲインは約20dBiあるが、ビーム半値幅は17度と狭い。また、30cmの円形パラボラアンテナでは、ゲインは約40dBiと高いが、半値指向角(ビーム幅)は約1.5度と非常に狭い。このため、建設機械にmm波無線機を使用することは大変難しい問題を伴う。従来、mm波無線機を使用して建設機械を遠隔操縦するものとしては、例えば、東急建設技術研究所報No.20(p209〜p214)に示されるものが知られている。これらの建設機械には、一定の方位を向ける追尾雲台を設置して、追尾雲台にmm波無線機を搭載し、操縦側には電動雲台上にmm波無線機を搭載して撮像信号を受信している。
【0005】
図10は、山の崖が崩落して、トンネルが陥没したり道路が岩石で覆われたような災害現場の一例を示す図であり、図11は、土砂崩れや土石流によって河川が土砂に埋もれた災害現場の一例を示す図である。このような災害現場では、引き続き、崖の崩落、土砂崩れ、土石流の流入等が起きる恐れがあっても、人名救助の立場等から、緊急に復旧工事を行う必要があり、また、この工事に当たっては2次災害の発生を極力防止しなければならない。特に、我が国では、このような災害の発生し易い場所が多く、このような災害現場での工事には、遠隔操縦による建設機械の作業は欠かせない。
【0006】
【発明が解決しようとする課題】
ところで、通常、災害現場は、図10および図11に示すように、平担な場所ではなく、建設機械と遠隔操縦する場所とに高低差があったり、建設機械が傾斜した状態で作業したりするのが一般的である。また、このような災害現場の復旧工事では、2次災害を避けるために、200〜300m離れた地点から建設機械を遠隔操縦する必要がある。図10に示すような道路上への崖の崩落現場では、建設機械は、遠隔操縦される場所から離れた崩落しまた傾斜した土石上で作業することになる。また、図11に示すような河川の土石流の災害現場では、建設機械は、谷底で作業し、遠隔操縦する場所は建設機械よりも高い位置に設置されることになる。
【0007】
このように、災害現場での建設機械は、傾斜した場所を移動したり、作業する必要があり、また、遠隔操縦する場所との間に大きな高低差があるのが特徴である。
【0008】
一方、このような災害現場で、建設機械を所望通りに遠隔操縦するために、mm波無線機を利用して撮像信号を伝送しようとすると、建設機械上にアンテナを一定の方向に向ける追尾雲台を設ける必要がある。しかし、一般に、追尾雲台は構造が複雑であるため高価であり、さらにその制御装置を含めると非常に高価なものとなる。そのため、現実に実用化されている雲台は、旋回方向のみ追尾可能なものを用い、垂直方向への追尾機能は備えていない。
【0009】
しかし、このような追尾装置には次のような問題がある。本発明が想定している災害現場は、建設機械と遠隔操縦装置間の距離が200〜300mで高低差が50m程度、即ち、両者間の傾斜角度14°にもなり得る。従って、図12に示すように、このような現場で、mm波無線機のアンテナとしてホーンアンテナを使用した場合は、ビーム幅は17度(片側8.5。)しかないので、斜度10°にもなると伝送が不可能となる。即ち、建設機械側に搭載されたmm波無線機のビーム幅から操縦室側のmm波無線機は外れてしまうことになる。同様に、建設機械としてクローラを駆動輪とする油圧ショベルを用いる場合には、この油圧ショベルは急傾斜地の登坂能力があり、災害現場では20°程度までの傾斜地で作業する場合がある。従って、このような作業現場では、操縦室側のアンテナは建設機械側のアンテナのビーム幅からは大きく外れ、撮像信号の伝送は不可能となる。
【0010】
本発明の目的は、上記の種々の問題点に鑑みて、先の災害現場のような、建設機械が傾斜した状態で作業したり、また建設機械と遠隔操縦される場所との間に大きな高低差があるような作業現場においても、高価な追尾装置等を使用することなく、このような状況に適合することのできる安価なアンテナ設備を使用するとともに、アンテナを建設機械上の最適な位置に設置して、遠隔操縦されることを可能にした建設機械を提供することにある。
【0011】
【課題を解決するための手段】
本発明は、上記の課題を解決するために、次のような手段を採用した。
【0012】
その手段は、上部旋回体と、作業状況を撮像する撮像手段と、上部旋回体に設置され、撮像された撮像信号を送信する機械側mm波無線機とを備え、遠隔の場所に設けられる操縦側mm波無線機によって受信された前記撮像信号に基づいて機械側が遠隔操縦され、かつ、機械側を操縦側から200m〜300m離した状態の下に、機械側のアンテナが操縦 側のアンテナに対して30°傾斜するような作業現場で、機械側を遠隔操縦することができるようにした建設機械であり、
前記機械側mm波無線機のアンテナに、水平方向には無指向性で、垂直方向に40度以上のビーム幅を有する送受信特性を有するオムニアンテナを用いて、このアンテナを、雲台を介さずに機械側に設置し、前記操縦側mm波無線機のアンテナにパラボラアンテナを用いて、このアンテナを、雲台を介して設置するようにしたことを特徴とする。
【0013】
〔発明が解決しようとする課題〕の項で述べたように、特にmm波無線機を使用して遠隔操縦される建設機械にあっては、災害現場で復旧工事を行う場合のように、建設機械の機械側と操縦側とに高低差のある場所や傾斜地のような特殊な作業現場(本発明が想定している〔0009〕に記載の災害現場のような作業現場、すなわち、遠隔操縦側から200〜300m離れ、遠隔操縦側との間に高低差が15°近くある場所又は20度程度の傾斜地)で建設作業を行う場合、機械側での作業状況に関する撮像信号を操縦側に伝送する必要上、従来は、無人の機械側における無線機のアンテナを操縦側の無線機のアンテナに常に自動的に向けるようにするための、垂直方向への追尾機能も備えた追尾雲台やこれの制御装置を機械側に設置することが必要不可欠であると認識されていた。しかしながら、特に、上部旋回体が旋回したり振動したりする建設機械の機械側にこうした設備を設置すると、追尾雲台やその制御装置が非常に高価なものになるという問題があった。そのため、従来の建設機械では、機械側の追尾雲台に、垂直方向への追尾機能をもたないものを実際には用いていて、前記の特殊な作業現場では、機械側の撮像信号を操縦側に伝送することができなかった。
【0014】
こうした建設機械の技術分野特有の問題を解消するため、技術開発を進めた結果、機械側mm波無線機のアンテナに、水平方向には無指向性で垂直方向に40度以上のビーム幅を有する送受信特性を有するオムニアンテナを用いると、操縦者のいる操縦側に手動又は自動の何らかの雲台を設置するだけで、機械側には、追尾雲台やその制御装置を備えた高価なアンテナ設備を設置しなくても、機械側を操縦側から200m〜300m離した状態の下に、機械側のアンテナが操縦側のアンテナに対して30°傾斜するような作業現場で、機械側の撮像信号を操縦側に伝送するように設計することが可能であることを見い出した。その場合、機械側のアンテナを上部旋回体の所望の位置に設置しても、上部旋回体の旋回操作時に機械側の撮像信号を操縦側に伝送するようにすることができる。
【0015】
そして、こうした性能を有する建設機械であれば、本発明が想定している前記の災害現場のような特殊な作業現場でも、上部旋回体の旋回操作時に機械側の撮像信号を操縦側に伝送することができる。したがって、本発明によれば、災害現場のような、建設機械が傾斜した状態で作業したり、また建設機械と遠隔操縦される場所との間に大きな高低差があるような作業現場においても、高価な追尾装置等を使用することなく、このような状況に適合することのできる安価なアンテナ設備を使用するとともに、アンテナを建設機械上の最適な位置に設置するととにより、上部旋回体の旋回操作時でも、機械側の撮像信号を操縦側に伝送して遠隔操縦されることを可能にした建設機械を得ることができる。
【0016】
【発明の実施の形態】
はじめに、本発明の第1の実施形態を図1から図8を用いて説明する。
【0017】
図2は、本実施形態に係わる油圧ショベルとこの油圧ショベルを遠隔操縦する遠隔操作室との配置を示す斜視図である。
【0018】
同図において、1は建設機械としての油圧ショベル、11は油圧ショベル1に設けられ、油圧ショベル1の作業状況を撮像する複数個のカメラ、12は、後に詳述するように、油圧ショベル1の上部旋回体4に設置され、遠隔操縦室2にカメラ11によって撮像された撮像信号を送信する機械側mm波無線機としての50GHz簡易無線機、2は油圧ショベル1から遠隔の場所に設置され、油圧ショベル1を遠隔操縦する遠隔操縦室、21は遠隔操縦室2に設けられ、油圧ショベル1の50GHz簡易無線機12から送信された撮像信号を受信する操縦側mm波無線機としての50GHz簡易無線機、4は油圧ショベル1の上部旋回体、5は上部旋回体4に設けられる運転室、6は上部旋回体4に設けられるフロント機構である。
【0019】
ここで、遠隔操縦室2は、油圧ショベル1の50GHz簡易無線機12から送信された撮像信号を50GHz簡易無線機21で受信し、映像モニタを見ながら油圧ショベル1に操縦信号を送信し遠隔操縦する。また、遠隔操縦する場所としては、例えば、ワンボックスカー、小型バス、ブレハブ小屋等を遠隔操縦室2として利用することもできる。
【0020】
図1は、遠隔操縦に係わる油圧ショベル側装置および遠隔操縦室側装置の構成を示す図である。
【0021】
同図において、13はカメラDに設けられる雲台、14は合成分割器、15はインターフェース、16は雲台・ズーム制御器、17は油圧ショベル側の特定小電力無線機、18は油圧ショベル1に設けられるコントローラ、22は油圧ショベル1の50GHz簡易無線機12を撮像するカメラ、23は50GHz簡易無線機21およびカメラ22が載置される雲台、24はインターフェース、25は50GHz簡易無線機21によって受信された撮像信号を再生して映像するモニタ、26はカメラ22によって撮像された撮像信号を再生して映像するモニタ、27,28は操作盤、29は操作機、30は特定小電力無線機、31は50GHz簡易無線機21のパラボラアンテナである。なお、その他の構成は図2に示す同符号のものと同じである。
【0022】
ここで、50GHz簡易無線機12,21間では、油圧ショベル1側から遠隔操縦室2側に撮像信号を、また、遠隔操縦室2側から油圧ショベル1側にカメラDおよびカメラ雲台13の操作信号が送信される。また、特定小電力無線機30から特定小電力無線機17に車体の操作に係わる操作信号が送信される。このように、本実施形態では遠隔操縦される油圧ショベル1には2系統の無線設備が必要である。
【0023】
また、油圧ショベル1には4台のカメラ11が搭載されており、そのうち、カメラA〜カメラCは固定カメラであり、カメラDは電動雲台13に搭載される。4台のカメラ11によって撮像された信号は合成分割器14に入力され、インターフェース18を介して50GHz簡易無線機12本体に入力される。
【0024】
油圧ショベル1の50GHz簡易無線機12のアンテナは後述するように、オムニアンテナが使われ、50GHz簡易無線機12からの撮像信号を送信する。また、遠隔操縦室2の上部には50GHz簡易無線機21が設置され、受信された撮像信号は遠隔操縦室2内部に導かれ、インターフェース24を介してモニタ25に映し出される。油圧ショベル1の合成分割器14では、カメラA〜カメラDによって撮像された4画面を合成することも、また特定の1画面を選択することもできるが、その合成選択は遠隔操縦室2の操作盤27からの操作によって行われる。
【0025】
また、カメラDやカメラ雲台13を操作する場合は、操作盤27からの操作により出力される操作信号がインターフェース24を介して50GHz簡易無線機21から撮像信号の周波数とは別の周波数で送信され、50GHz簡易無線機12で受信される。受信された操作信号はインターフェース15を介して、雲台・ズーム制御器16からカメラDまたはカメラ雲台13に入力され、カメラDのズームまたはカメラ雲台13を制御する。ここで、50GHz簡易無線機21は高利得のパラボラアンテナ31を使う。パラボラアンテナ31の方向は電動雲台23を操作盤28からの操作によって方向制御し、油圧ショベル側の50GHz無線機12の方向に向ける。電動雲台23の上にはカメラ22が50GHz簡易無線機21の方向と同軸に設置し、カメラ22の撮像画像をモニタ26に映しているので、電動雲台23は操作盤28を操作することにより、モニタ26の画面中央に50GHz簡易無線機12のアンテナを映し出すように制御することができる。
【0026】
このように、本実施形態によれば、油圧ショベル1側の50GHz簡易無線機12には、特別の追尾雲台等の方向制御装置を必要としないものである。また、遠隔操縦室2側では、油圧ショベル1を遠望するカメラ22によって50GHz簡易無線機12のアンテナを中央に映し出し、操作盤28からの操作により電動雲台23の制御により手動追尾機能を実現している。勿論、自動追尾の機能を付ければ、この部分は自動化できる。
【0027】
油圧ショベル1本体の操縦は、遠隔操縦室2に設置される操作機29を操作することによって行われ、この操作信号は特定小電力無線機30から特定小電力無線機17に送信され、受信された操作信号はコントローラ18に入カされ、さらに図示されていない電磁弁を駆動し、油圧ショベル1のパイロット圧を制御して、油圧ショベル1を操縦する。
【0028】
次に、50GHz簡易無線機12の油圧ショベル1上の設置位置について図3を用いて説明する。
【0029】
図3(a)は、50GHz簡易無線機12が油圧ショベル1の運転室5の屋上に設置された油圧ショベル1の正面図、図3(b)は、同上油圧ショベル1の平面図、図3(c)は50GHz簡易無線機12の設置位置の拡大図である。
【0030】
次に、本実施形態に係わる油圧ショベル1に設置される50GHz簡易無線機12の詳細な構成を図4から図6を用いて説明する。
【0031】
図4は、50GHz簡易無線機12の概観を示す図であり、121は50GHz簡易無線機12の無線機本体、122は50GHz簡易無線機本体121上に設置されるオムニアンテナである。
【0032】
図5(a)はオムニアンテナ122、図5(b)はオムニアンテナ122のスロットアンテナ部、のそれぞれの詳細な構成を示す図である。
【0033】
これらの図において、123はスロットアンテナ部を防水する等の目的で設けられるレドーム、124はスロットアンテナ部、125は導波管、126はフランジである。
【0034】
図4に示すよう、無線機本体121の上部には導波管125で接続されたオムニアンテナ122が取付られており、また、図5に示すように、フランジ126が無線機本体121に固定されると、導波管125が無線機本体121の導波管と一致し、電波の電力はスロットアンテナ部124に伝達され、スロット129から電波として放出される。ここで、導波管125は、例えば、銅や、黄銅製の導電性の板状の金属体が用いられる。
【0035】
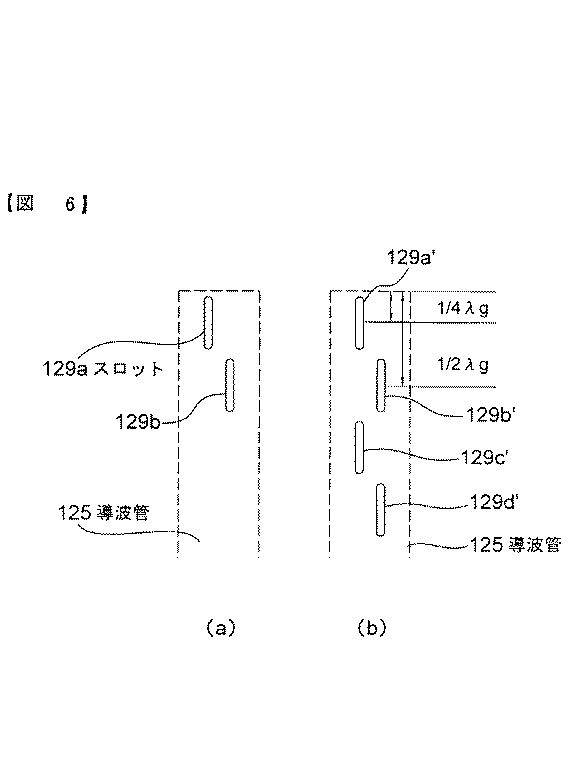
図6(a)は、導波管125のスロット129a〜129bが設けられている一方の面を示し、図6(b)は、スロット129a’〜129d’が設けられている前記面と対向する他方の面を示す図である。
【0036】
これらの図に示すように、導波管125の両面には、使用する電波波長に応じて所定の位置にスロット129a〜129b、スロット129a’〜129d’が設けられ、スロツト129はアンテナとして動作する。このアンテナは導波管125のH面のスロットアンテナとして知られている。各スロット129はアンテナとして動作するので複数のスロット129を設けることは、アレーアンテナの原理に従って、スロット129の位置と配置に従ったアンテナの指向特性を有することなる。特に、スロット129の数は垂直方向のビーム幅とアンテナのゲインを左右する。
【0037】
50GHz帯のスロットアンテナの場合、図6(a),(b)に示すように、各スロットを同相で励起するには、通常のアレーアンテナのように一直線上には配置できず、アンテナの長さ方向に対して中心から左右に大きくずれた配置となる。また、スロット数が奇数個の場合は、アンテナでは周方向の特性が大きくアンバランスとなるために、偶数個にしてアンテナゲインの周方向の特性を均一化することが望ましい。
【0038】
また、スロット数はアンテナの垂直指向性、即ち、垂直のビーム幅を左右する。
【0039】
表1に、スロットアンテナのスロット数と垂直ビーム幅、アンテナゲインとの関係を示す。
【0040】
【表1】
この表に示すごとく、スロット数を増大すると、アンテナゲインは大きくなるが、垂直ビーム幅が小さくなることがわかる。
【0042】
図7に、本実施形態に係わる油圧ショベル1側の50GHz簡易無線機12と遠隔操縦室2側の50GHz簡易無線機21との構成の概要を示す。
【0043】
同図に示すように、本実施形態の50GHz簡易無線機12において、オムニアンテナ122を用いることにより、水平方向の全方向に対して無指向性を有し、また垂直方向には所定のビーム幅をもつ送受信特性を有しているので、油圧ショベル1が旋回したとしても、水平方向および垂直方向の広範囲にわたって電波を放射することができ、油圧ショベル1には追尾装置等の特別の装置を設けなくてもよい。
【0044】
図8は、50GHz簡易無線機12のオムニアンテナ122と50GHz簡易無線機21のパラボラアンテナの中心間距離の位置ずれに対する、オムニアンテナ122から放射された電波の伝送距離との関係を示す図である。
【0045】
同図において、各計算値は、オムニアンテナがパラボラアンテナに対してそれぞれ30°傾斜している場合を前提とし、aはスロットアンテナから放射されるビーム幅が30°の場合の計算値であり、bはスロットアンテナから放射されるビーム幅が40°の場合の計算値であり、cはスロットアンテナから放射されるビーム幅が90°の場合の計算値である。
【0046】
ここで、傾斜角度を30°で計算したのは、本発明が想定している災害現場の油圧ショベルの傾斜角度や遠隔操縦する場所との高低差との関係を考慮して設定されたものである。また、油圧ショベル側の50GHz簡易無線機の出力は15mW、受信感度は−70dBm、周波数は50GHzとし、遠隔操縦室側の50GHz簡易無線機はゲインが40dBiの高ゲインの300mmのパラボラアンテナを用いた場合を想定して計算したものである。また、スロットアンテナの垂直方向の指向特性は電界強度が、ビームの半値幅θm、アンテナの中心からの角度θとするとき、cos2(2θ/θm) で変化するものとして計算している。
【0047】
この計算結果によれば、ビーム幅40°、伝送距離200mの位置では、300mmのパラボラアンテナの中心からスロットアンテナが2.7m位置ずれていても伝送できることを意味している。また、ビーム幅を30°としたときは、伝送距離は災害現場において必要とする200mに満たず、ビーム幅40°〜90°の範囲で、200m以上の伝送距離が得られることがわかる。従って、50GHz簡易無線機を災害現場で使うには、スロットアンテナのビーム幅は少なくとも40°以上なければ撮像信号を伝送できないことになる。
【0048】
ビーム幅を40°以上とするためには、表1に示すように、オムニアンテナ122のスロット数が2個以下で実現することができ、この場合、油圧ショベル側の50GHz簡易無線機には、特別の追尾装置は不要となる。また、遠隔操縦室側においても、電動雲台に搭載したカメラと同軸の50GHz簡易無線機を備えるだけいでよいので簡単な構成となり、全体として安価な遠隔操縦可能な油圧ショベルを実現することができる。
【0049】
次に、本発明の第2の実施形態を図9を用いて説明する。
【0050】
図9は、油圧ショベル1の50GHz簡易無線機12に設けられるオムニアンテナの構成を示す図である。本実施形態は、第1の実施形態と比べて、オムニアンテナ122の構造が異なる点で相違している。
【0051】
同図において、1220はレドーム、1221はレンズ部、1222はスロットアンテナ部である。
【0052】
本実施形態のオムニアンテナは、スロット数が4個のスロットアンテナに、レンズ部1221によって電波レンズを構成し、出射する電波のビーム幅を拡げるようにしたものである。ここでは、レンズ部1221は、レドーム1220に屈折率が1より大きい誘電体を用いて構成する。このレンズ部1221によって電波の指向性を拡げることはできるが、実用的には2倍以下であり、これ以上拡げるためにはレドーム1220に屈折率の大きな材料を用いなければならない。例えば、このような材料として、4弗化塩化エチレンを用いた場合は、誘電率2.5程度、屈折率1.6であって、ビーム幅は2倍程度の拡大が可能である。
【0053】
次に、表2に、油圧ショベル1が遠隔操縦室2から200m離れ30°傾斜している(オムニアンテナ122がパラボラアンテナ31に対して30°傾斜している)状態において、オムニアンテナ122から各垂直ビーム幅で放射された電波がパラボラアンテナ31に伝送可能な、オムニアンテナ122の油圧ショベル1の旋回中心からの許容距離(油圧ショベル1の旋回中心からオムニアンテナ122を離してもよい距離)を示す。この表2に記載されている旋回中心からの許容距離の値(m)は、図8における横軸200(伝送距離(m))の地点における縦軸の値(中心からの距離(m))を各ビーム幅毎に記入し たものである。なお、オムニアンテナから放射される電波のビーム幅が30°の場合には、既述の図8から分かるように、電波の伝送距離が200mに達しないので、許容距離の数値は記入せずに横線を引いている。
【0054】
【表2】
この計測結果によれば、油圧ショベル1の傾斜が30°以内で、オムニアンテナ122のビーム幅が40°の場合は、オムニアンテナ122の旋回中心からの設置許容距離は2.6m以内であり、オムニアンテナ122のビーム幅が90°の場合は、オムニアンテナ122の旋回中心からの設置許容距離は3.2m以内であることがわかる。また、前述した図8によれば、油圧ショベル1が遠隔操縦室2から300m離れ30°傾斜している状態において、オムニアンテナ122のビーム幅が90°の場合は、オムニアンテナ122の旋回中心からの設置許容距離は略3m以内であることがわかる。これらの距離は、図3(b)に示すように、上部旋回体4をカバーする範囲である。したがって、オムニアンテナ122を、垂直方向に40°以上のビーム幅を有するものの中から、災害現場の状態に応じて適宜選択して用いれば、オムニアンテナ122を上部旋回体4の所望の位置に設置することができる。
【0056】
上記の各実施形態で述べたように、各実施形態の油圧ショベル1に搭載される50GHz簡易無線機12およびそのオムニアンテナ122は簡単な構成を有するものであるから、従来のものと容易に取り換えることができ、また、油圧ショベル1に容易に取り付けることができるものである。即ち、油圧ショベル1に簡単に50GHz簡易無線機12を取り付けることができるので、緊急を要する災害現場の復旧作業の際に、簡単に油圧ショベルを実用的な遠隔操縦可能な油圧ショベル1に改造することができ、また、その結果として、安価に遠隔操縦可能な油圧ショベルを実現することができるものである。
【0057】
上記のごとく、本発明は、同じ災害現場でも、遠距離の伝送距離を必要としたり、平坦な場所間での遠隔操縦に適用するものではなく、200m〜300mという比較的短距離の間での遠隔操縦であって、しかも、油圧ショベルが20度程度の傾斜地で作業したり、また、油圧ショベルと遠隔操縦側との間に高低差が15°近くある場所で作業したりするというような特殊な作業現場(〔発明が解決しようとする課題〕の項で述べたような災害現場)に適用することにより、極めて有効に機能させることができる。
【0058】
【発明の効果】
以上、本発明によれば、通常の災害現場で復旧工事をする場合のように、遠隔操縦する場所から200〜300m離れた場所で、しかも建設機械と遠隔操縦側との間に高低差が15°近くあり、または建設機械が20度程度の傾斜地で作業するような場合に、建設機械に、高価な追尾装置を使用することなく、このような状況に適合する安価なアンテナ設備を用いるとともに、このアンテナを建設機械上の最適な位置に設置することにより、建設機械で撮像された信号を、上部旋回体の旋回操作時でも、遠隔操縦側に安定確実に伝送することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態に係わる遠隔操縦される油圧ショベル側装置および遠隔操縦室側装置の構成を示す図である。
【図2】本実施形態に係わる油圧ショベル1とこの油圧ショベル1を遠隔操縦する遠隔操作室2との配置を示す斜視図である。
【図3】本実施形態に係わる50GHz簡易無線機12の運転室5上に設置された油圧ショベル1の正面図および平面図、50GHz簡易無線機12の設置位置の拡大図である。
【図4】本実施形態に係わる50GHz簡易無線機12の概観を示す図である。
【図5】本実施形態に係わるオムニアンテナ122およびオムニアンテナ122のスロットアンテナ部124の詳細な構成を示す図である。
【図6】本実施形態に係わる導波管125のスロット129a〜129bが設けられている一方の面、およびスロット129a’〜129d’が設けられている前記面と対向する他方の面を示す図である。
【図7】本実施形態に係わる油圧ショベル1側の50GHz簡易無線機12と遠隔操縦室2側の50GHz簡易無線機21との構成の概要を示す図である。
【図8】本実施形態に係わる50GHz簡易無線機12のオムニアンテナ122と50GHz簡易無線機21のパラボラアンテナ31の中心間距離の位置ずれに対する、オムニアンテナ122から放射された電波の伝送距離との関係を示す図である。
【図9】本発明の第2の実施形態に係わる50GHz簡易無線機12に設けられるオムニアンテナ122の構成を示す図である。
【図10】本発明が適用される、山の崖が崩落して、トンネルが陥没したり道路が岩石で覆われたような災害現場の一例を示す図である。
【図11】本発明が適用される、土砂崩れや土石流によって河川が土砂に埋もれた災害現場の一例を示す図である。
【図12】従来技術に係わる油圧ショベル1側の50GHz簡易無線機と遠隔操縦室側の50GHz簡易無線機21との災害現場における位置関係を示す図である。
【符号の説明】
1 油圧ショベル
11 カメラ
12 50GHz簡易無線機
121 無線機本体
122 オムニアンテナ
1221 レンズ部
123、1220 レドーム
124,1222 スロットアンテナ部
125 導波管
126 フランジ
129 スロット
13 雲台
17 小電力無線機
18 コントローラ
2 遠隔操縦室
21 50GHz簡易無線機
22 カメラ
23 電動雲台
25,26 モニタ
27,28 操作盤
29 操作機
30 小電力無線機
4 上部旋回体
5 運転室
6 フロント機構
Claims (1)
- 上部旋回体と、作業状況を撮像する撮像手段と、上部旋回体に設置され、撮像された撮像信号を送信する機械側mm波無線機とを備え、遠隔の場所に設けられる操縦側mm波無線機によって受信された前記撮像信号に基づいて機械側が遠隔操縦され、かつ、機械側を操縦側から200m〜300m離した状態の下に、機械側のアンテナが操縦側のアンテナに対して30°傾斜するような作業現場で、機械側を遠隔操縦することができるようにした建設機械であって、
前記機械側mm波無線機のアンテナに、水平方向には無指向性で、垂直方向に40度以上のビーム幅を有する送受信特性を有するオムニアンテナを用いて、このアンテナを、雲台を介さずに機械側に設置し、前記操縦側mm波無線機のアンテナにパラボラアンテナを用いて、このアンテナを、雲台を介して設置するようにしたことを特徴とする建設機械。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03297899A JP3547332B2 (ja) | 1999-02-10 | 1999-02-10 | 建設機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03297899A JP3547332B2 (ja) | 1999-02-10 | 1999-02-10 | 建設機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000229781A JP2000229781A (ja) | 2000-08-22 |
| JP3547332B2 true JP3547332B2 (ja) | 2004-07-28 |
Family
ID=12373985
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP03297899A Expired - Fee Related JP3547332B2 (ja) | 1999-02-10 | 1999-02-10 | 建設機械 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3547332B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5912917B2 (ja) * | 2012-06-28 | 2016-04-27 | 三菱重工業株式会社 | 無線操作式車両の遠隔操作システムおよび該システムにおける無線操作式車両の復旧方法 |
| JP2015043488A (ja) * | 2013-08-26 | 2015-03-05 | 清水建設株式会社 | 遠隔操作装置及びそれを用いた遠隔施工方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2599430B2 (ja) * | 1988-06-09 | 1997-04-09 | 明星電気 株式会社 | オムニディレクショナルアンテナ |
| JP3380000B2 (ja) * | 1993-07-07 | 2003-02-24 | 株式会社フジタ | 遠隔操作による移動体の移動方法 |
| JP3340271B2 (ja) * | 1994-12-27 | 2002-11-05 | 株式会社東芝 | 無指向性アンテナ |
| JP3358921B2 (ja) * | 1995-08-29 | 2002-12-24 | 新キャタピラー三菱株式会社 | アンテナ自動追尾方法 |
| JPH0984161A (ja) * | 1995-09-19 | 1997-03-28 | Nishimatsu Constr Co Ltd | 固定局と移動局との双方向無線通信方法 |
-
1999
- 1999-02-10 JP JP03297899A patent/JP3547332B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000229781A (ja) | 2000-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3364419B2 (ja) | 遠隔無線操縦システム並びに遠隔操縦装置,移動式中継局及び無線移動式作業機械 | |
| US8125529B2 (en) | Camera aiming using an electronic positioning system for the target | |
| EP2131443A1 (en) | Steerable directional antenna system for autonomous air vehicle communication | |
| JP3547332B2 (ja) | 建設機械 | |
| JP3612213B2 (ja) | 遠隔無線操縦システム並びに無線移動式作業機械及び遠隔操縦装置並びに電波反射機構付きの無線装置 | |
| JP3743338B2 (ja) | 覆域統制装置およびセンサ装置 | |
| JP3508719B2 (ja) | 空中線制御装置及び制御方法 | |
| JP4587891B2 (ja) | 無人作業装置の遠隔通信システム及び方法 | |
| JP3717003B2 (ja) | 通信用アンテナの向き調整装置 | |
| JP2002345058A (ja) | 作業機械の遠隔操作装置 | |
| JP3612212B2 (ja) | 遠隔無線操縦システム並びに無線移動式作業機械及び遠隔操縦装置 | |
| JP2005204256A (ja) | 建設機械及び建設機械の無線遠隔操縦システム | |
| JP2000232318A (ja) | 建設機械 | |
| JP2628008B2 (ja) | 作業機械の動作状態視認方法 | |
| JPH10270926A (ja) | 建設機械のアンテナ追尾方法、建設機械の通信装置、通信装置を搭載した建設機械 | |
| JP2000332534A (ja) | 建設機械およびその遠隔操縦設備 | |
| JPH0787004A (ja) | 遠隔箇所の作業機械への通信方法 | |
| JP3358921B2 (ja) | アンテナ自動追尾方法 | |
| JPH06258077A (ja) | 自動掘削システム | |
| JP2006132265A (ja) | 建設機械の遠隔無線操縦システム | |
| JP2956883B2 (ja) | 電波反射式画像送信装置 | |
| JP2963959B2 (ja) | 中継アンテナ装置 | |
| KR102488250B1 (ko) | 비행체를 이용한 이동체 무선통신 시스템의 안테나 방향 자동 정렬유지장치 | |
| JPH07221693A (ja) | 遠隔操作用画像の伝送方法及びその装置 | |
| JPH06268563A (ja) | 移動体における無線中継方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040413 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080423 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090423 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090423 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100423 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100423 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110423 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120423 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130423 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140423 Year of fee payment: 10 |
|
| LAPS | Cancellation because of no payment of annual fees |