JP2020181990A - 接合装置のパラメータ調整方法および接合システム - Google Patents
接合装置のパラメータ調整方法および接合システム Download PDFInfo
- Publication number
- JP2020181990A JP2020181990A JP2020120755A JP2020120755A JP2020181990A JP 2020181990 A JP2020181990 A JP 2020181990A JP 2020120755 A JP2020120755 A JP 2020120755A JP 2020120755 A JP2020120755 A JP 2020120755A JP 2020181990 A JP2020181990 A JP 2020181990A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- degree
- holding portion
- parameters
- parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005304 joining Methods 0.000 title claims abstract description 135
- 238000000034 method Methods 0.000 title claims abstract description 76
- 239000000758 substrate Substances 0.000 claims abstract description 486
- 238000007689 inspection Methods 0.000 claims abstract description 110
- 230000008859 change Effects 0.000 claims abstract description 47
- 238000003825 pressing Methods 0.000 claims abstract description 26
- 230000002093 peripheral effect Effects 0.000 claims description 90
- 238000006116 polymerization reaction Methods 0.000 claims description 65
- 230000008569 process Effects 0.000 claims description 42
- 239000013078 crystal Substances 0.000 claims description 8
- 229910021421 monocrystalline silicon Inorganic materials 0.000 claims description 8
- 238000001179 sorption measurement Methods 0.000 abstract description 88
- 238000012545 processing Methods 0.000 description 47
- 230000007246 mechanism Effects 0.000 description 23
- 238000003860 storage Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 11
- 235000012431 wafers Nutrition 0.000 description 11
- 238000012546 transfer Methods 0.000 description 9
- 230000007704 transition Effects 0.000 description 9
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 6
- 238000003384 imaging method Methods 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 229910052681 coesite Inorganic materials 0.000 description 3
- 229910052906 cristobalite Inorganic materials 0.000 description 3
- -1 oxygen ions Chemical class 0.000 description 3
- 230000000704 physical effect Effects 0.000 description 3
- 229910052682 stishovite Inorganic materials 0.000 description 3
- 230000007723 transport mechanism Effects 0.000 description 3
- 229910052905 tridymite Inorganic materials 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- MYMOFIZGZYHOMD-UHFFFAOYSA-N Dioxygen Chemical compound O=O MYMOFIZGZYHOMD-UHFFFAOYSA-N 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 229910001882 dioxygen Inorganic materials 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 238000002407 reforming Methods 0.000 description 2
- 230000003313 weakening effect Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000005411 Van der Waals force Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 229910001873 dinitrogen Inorganic materials 0.000 description 1
- 125000002887 hydroxy group Chemical group [H]O* 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 125000005372 silanol group Chemical group 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images



















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/20—Sequence of activities consisting of a plurality of measurements, corrections, marking or sorting steps
- H01L22/26—Acting in response to an ongoing measurement without interruption of processing, e.g. endpoint detection, in-situ thickness measurement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67092—Apparatus for mechanical treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/185—Joining of semiconductor bodies for junction formation
- H01L21/187—Joining of semiconductor bodies for junction formation by direct bonding
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67288—Monitoring of warpage, curvature, damage, defects or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/681—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment using optical controlling means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/75—Apparatus for connecting with bump connectors or layer connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L24/83—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected using a layer connector
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/93—Batch processes
- H01L24/94—Batch processes at wafer-level, i.e. with connecting carried out on a wafer comprising a plurality of undiced individual devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/20—Sequence of activities consisting of a plurality of measurements, corrections, marking or sorting steps
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/02—Bonding areas; Manufacturing methods related thereto
- H01L2224/04—Structure, shape, material or disposition of the bonding areas prior to the connecting process
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/02—Bonding areas; Manufacturing methods related thereto
- H01L2224/04—Structure, shape, material or disposition of the bonding areas prior to the connecting process
- H01L2224/05—Structure, shape, material or disposition of the bonding areas prior to the connecting process of an individual bonding area
- H01L2224/0554—External layer
- H01L2224/05599—Material
- H01L2224/05686—Material with a principal constituent of the material being a non metallic, non metalloid inorganic material
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/02—Bonding areas; Manufacturing methods related thereto
- H01L2224/07—Structure, shape, material or disposition of the bonding areas after the connecting process
- H01L2224/08—Structure, shape, material or disposition of the bonding areas after the connecting process of an individual bonding area
- H01L2224/081—Disposition
- H01L2224/0812—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/08135—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding the bonding area connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip
- H01L2224/08145—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding the bonding area connecting between different semiconductor or solid-state bodies, i.e. chip-to-chip the bodies being stacked
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/02—Bonding areas; Manufacturing methods related thereto
- H01L2224/07—Structure, shape, material or disposition of the bonding areas after the connecting process
- H01L2224/08—Structure, shape, material or disposition of the bonding areas after the connecting process of an individual bonding area
- H01L2224/081—Disposition
- H01L2224/0812—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/08151—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding the bonding area connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive
- H01L2224/08221—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding the bonding area connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked
- H01L2224/08225—Disposition the bonding area connecting directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding the bonding area connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked the item being non-metallic, e.g. insulating substrate with or without metallisation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/7501—Means for cleaning, e.g. brushes, for hydro blasting, for ultrasonic cleaning, for dry ice blasting, using gas-flow, by etching, by applying flux or plasma
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/7565—Means for transporting the components to be connected
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/757—Means for aligning
- H01L2224/75701—Means for aligning in the lower part of the bonding apparatus, e.g. in the apparatus chuck
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/757—Means for aligning
- H01L2224/75702—Means for aligning in the upper part of the bonding apparatus, e.g. in the bonding head
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/757—Means for aligning
- H01L2224/75743—Suction holding means
- H01L2224/75744—Suction holding means in the lower part of the bonding apparatus, e.g. in the apparatus chuck
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/757—Means for aligning
- H01L2224/75743—Suction holding means
- H01L2224/75745—Suction holding means in the upper part of the bonding apparatus, e.g. in the bonding head
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/758—Means for moving parts
- H01L2224/75801—Lower part of the bonding apparatus, e.g. XY table
- H01L2224/75802—Rotational mechanism
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/758—Means for moving parts
- H01L2224/75801—Lower part of the bonding apparatus, e.g. XY table
- H01L2224/75802—Rotational mechanism
- H01L2224/75803—Pivoting mechanism
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/758—Means for moving parts
- H01L2224/75801—Lower part of the bonding apparatus, e.g. XY table
- H01L2224/75804—Translational mechanism
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/758—Means for moving parts
- H01L2224/75821—Upper part of the bonding apparatus, i.e. bonding head
- H01L2224/75822—Rotational mechanism
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/758—Means for moving parts
- H01L2224/75821—Upper part of the bonding apparatus, i.e. bonding head
- H01L2224/75824—Translational mechanism
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/759—Means for monitoring the connection process
- H01L2224/75901—Means for monitoring the connection process using a computer, e.g. fully- or semi-automatic bonding
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/75—Apparatus for connecting with bump connectors or layer connectors
- H01L2224/759—Means for monitoring the connection process
- H01L2224/7592—Load or pressure adjusting means, e.g. sensors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/80009—Pre-treatment of the bonding area
- H01L2224/8001—Cleaning the bonding area, e.g. oxide removal step, desmearing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/80009—Pre-treatment of the bonding area
- H01L2224/8001—Cleaning the bonding area, e.g. oxide removal step, desmearing
- H01L2224/80013—Plasma cleaning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/802—Applying energy for connecting
- H01L2224/80201—Compression bonding
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/80001—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected by connecting a bonding area directly to another bonding area, i.e. connectorless bonding, e.g. bumpless bonding
- H01L2224/808—Bonding techniques
- H01L2224/80894—Direct bonding, i.e. joining surfaces by means of intermolecular attracting interactions at their interfaces, e.g. covalent bonds, van der Waals forces
- H01L2224/80896—Direct bonding, i.e. joining surfaces by means of intermolecular attracting interactions at their interfaces, e.g. covalent bonds, van der Waals forces between electrically insulating surfaces, e.g. oxide or nitride layers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/83—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected using a layer connector
- H01L2224/838—Bonding techniques
- H01L2224/83893—Anodic bonding, i.e. bonding by applying a voltage across the interface in order to induce ions migration leading to an irreversible chemical bond
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/93—Batch processes
- H01L2224/94—Batch processes at wafer-level, i.e. with connecting carried out on a wafer comprising a plurality of undiced individual devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L24/02—Bonding areas ; Manufacturing methods related thereto
- H01L24/04—Structure, shape, material or disposition of the bonding areas prior to the connecting process
- H01L24/05—Structure, shape, material or disposition of the bonding areas prior to the connecting process of an individual bonding area
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L24/02—Bonding areas ; Manufacturing methods related thereto
- H01L24/07—Structure, shape, material or disposition of the bonding areas after the connecting process
- H01L24/08—Structure, shape, material or disposition of the bonding areas after the connecting process of an individual bonding area
Landscapes
- Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Pressure Welding/Diffusion-Bonding (AREA)
Abstract
Description
まず、実施形態に係る接合システムの構成について図1〜図3を参照して説明する。図1および図2は、実施形態に係る接合システムの構成を示す模式図である。また、図3は、実施形態に係る第1基板および第2基板の接合前の状態を示す模式図である。
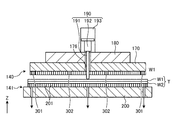
次に、接合装置41の構成について図4および図5を参照して説明する。図4および図5は、実施形態に係る接合装置41の構成を示す模式図である。
本願発明者は、鋭意研究の結果、接合装置41のパラメータを調整することで、重合基板Tに生じる歪みの方向および度合が変化することを突き止めた。そこで、実施形態に係る接合システム1では、パラメータを変更した場合における歪みの方向および度合の変化の傾向を示すトレンド情報と、検査装置31による重合基板Tの検査結果とに基づき、接合装置41のパラメータの自動調整を行うこととした。
上述した実施形態では、ステップS104において重合基板Tの均一性が目標条件を満たすまで、パラメータを変更し、変更後のパラメータにて接合処理を行うことを繰り返すこととした。これに限らず、接合システム1では、接合処理を行うことなく、複数のパラメータを一括して変更してもよい。
W2 第2基板
T 重合基板
1 接合システム
31 検査装置
41 接合装置
70 制御装置
140 第1保持部
141 第2保持部
160 第1移動部
190 ストライカー
301 外側吸着部
302 内側吸着部
311 第1吸着部
312 第2吸着部
Claims (11)
- 第1基板を上方から吸着保持する第1保持部と、前記第1保持部の下方に配置され、第2基板を下方から吸着保持する第2保持部と、前記第1保持部と前記第2保持部との間のギャップを調整する調整部と、前記第1基板の中心部を上方から押圧して前記第2基板に接触させるストライカーとを備え、前記調整部によって前記ギャップを調整したうえで、前記第1保持部に吸着保持された前記第1基板の中心部を前記ストライカーにて前記第2保持部に吸着保持された前記第2基板に接触させることにより、前記第1基板と前記第2基板とを接合する接合装置のパラメータ調整方法であって、
前記接合装置によって前記第1基板と前記第2基板とが接合された重合基板を検査する検査装置から前記重合基板に生じた歪みの方向および度合を示す検査結果を取得する取得工程と、
前記ギャップ、前記第1保持部による前記第1基板の吸着圧力、前記第2保持部による前記第2基板の吸着圧力および前記ストライカーによる前記第1基板の押圧力の少なくとも1つを含む複数のパラメータごとに、該パラメータを変更した場合における前記歪みの方向および度合の変化の傾向を示すトレンド情報と、前記取得工程において取得された前記検査結果とに基づき、前記複数のパラメータの少なくとも1つを変更するパラメータ変更工程と
を含む、接合装置のパラメータ調整方法。 - 前記パラメータ変更工程は、
前記重合基板の板面に設定された複数のゾーンのうち1つを選択し、選択された前記ゾーンにおける前記検査結果および前記トレンド情報に基づき、前記複数のパラメータの少なくとも1つを変更する、請求項1に記載の接合装置のパラメータ調整方法。 - 前記パラメータ変更工程は、
前記複数のゾーンのうち前記歪みの度合が最も大きいゾーンを前記検査結果に基づいて選択する、請求項2に記載の接合装置のパラメータ調整方法。 - 前記第1基板および前記第2基板は、
表面の結晶方向が[100]である単結晶シリコンウェハであり、
前記複数のゾーンは、
前記第1基板の中心部から前記第1基板の表面に対して平行な[0−11]結晶方向に向かう方向を0度と規定したときの45度の方向における外周部である45度外周ゾーン、90度の方向における外周部である90度外周ゾーン、前記45度外周ゾーンと前記中心部との中間部である45度中間ゾーンおよび前記90度外周ゾーンと前記中心部との中間部である90度中間ゾーンを含む、請求項2または3に記載の接合装置のパラメータ調整方法。 - 前記第1保持部は、
前記45度の方向を基準に90度間隔で配置され、前記第1基板の外周部を吸着保持する4つの第1吸着部と、
前記0度の方向を基準に90度間隔で配置され、前記第1基板の外周部を吸着保持する4つの第2吸着部と
を備え、
前記複数のパラメータは、
前記第1吸着部および前記第2吸着部のうち前記第1基板の吸着保持に用いられる吸着部を含む、請求項4に記載の接合装置のパラメータ調整方法。 - 前記複数のパラメータは、
前記第1保持部に吸着保持された前記第1基板の中心部を前記ストライカーにて押圧した後、前記第1保持部による前記第1基板の吸着保持を解除するタイミングを含む、請求項5に記載の接合装置のパラメータ調整方法。 - 前記パラメータ変更工程後に前記接合装置によって接合された前記重合基板の前記検査結果を前記検査装置から取得する再取得工程と、
前記再取得工程によって取得された前記検査結果に基づき、前記重合基板の均一性が目標条件を満たすか否かを判定する判定工程と
を含み、
前記パラメータ変更工程および前記再取得工程は、
前記判定工程によって前記重合基板の均一性が前記目標条件を満たすと判定されるまで繰り返される、請求項2〜6のいずれか一つに記載の接合装置のパラメータ調整方法。 - 前記パラメータ変更工程後に前記接合装置によって前記第1基板と前記第2基板とを接合したと仮定した場合における前記検査結果を前記トレンド情報に基づいて予測する予測工程
を含み、
前記パラメータ変更工程は、
前記予測工程において予測された前記検査結果と前記トレンド情報とに基づいて前記複数のパラメータの少なくとも1つをさらに変更する、請求項2〜6のいずれか一つに記載の接合装置のパラメータ調整方法。 - 前記予測工程は、
前記パラメータ変更工程後に前記接合装置によって前記第1基板と前記第2基板とを接合したと仮定した場合における前記検査結果を、前記トレンド情報と、前記パラメータの変更量と前記歪みの度合の変化量との相関を示す相関情報とに基づいて予測する、請求項8に記載の接合装置のパラメータ調整方法。 - 第1基板と第2基板とを接合する接合装置と、
前記接合装置によって前記第1基板と前記第2基板とが接合された重合基板を検査する検査装置と、
前記接合装置のパラメータを変更する制御部と
を備え、
前記接合装置は、
前記第1基板を上方から吸着保持する第1保持部と、
前記第1保持部の下方に配置され、前記第2基板を下方から吸着保持する第2保持部と、
前記第1保持部と前記第2保持部との間のギャップを調整する調整部と、
前記第1基板の中心部を上方から押圧して前記第2基板に接触させるストライカーと
を備え、
前記制御部は、
前記検査装置から前記重合基板に生じた歪みの方向および度合を示す検査結果を取得する取得部と、
前記ギャップ、前記第1保持部による前記第1基板の吸着圧力、前記第2保持部による前記第2基板の吸着圧力および前記ストライカーによる前記第1基板の押圧力の少なくとも1つを含む複数のパラメータごとに、該パラメータを変更した場合における前記歪みの方向および度合の変化の傾向を示すトレンド情報と、前記取得部において取得された前記検査結果とに基づき、前記複数のパラメータの少なくとも1つを変更するパラメータ変更部と
を備える、接合システム。 - 前記制御部は、
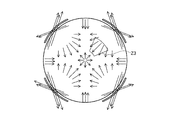
前記取得部によって取得された検査結果に基づき、前記歪みの方向が矢印で示され、前記歪みの度合が前記矢印の長さ、太さおよび色の少なくとも1つで示された画像を表示部に表示させる表示制御部
を備える、請求項10に記載の接合システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018160051 | 2018-08-29 | ||
| JP2018160051 | 2018-08-29 | ||
| JP2020522885A JP6736799B1 (ja) | 2018-08-29 | 2019-08-20 | 接合装置のパラメータ調整方法および接合システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020522885A Division JP6736799B1 (ja) | 2018-08-29 | 2019-08-20 | 接合装置のパラメータ調整方法および接合システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020181990A true JP2020181990A (ja) | 2020-11-05 |
| JP6961046B2 JP6961046B2 (ja) | 2021-11-05 |
Family
ID=69643226
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020522885A Active JP6736799B1 (ja) | 2018-08-29 | 2019-08-20 | 接合装置のパラメータ調整方法および接合システム |
| JP2020120755A Active JP6961046B2 (ja) | 2018-08-29 | 2020-07-14 | 接合装置のパラメータ調整方法、接合装置および接合システム |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020522885A Active JP6736799B1 (ja) | 2018-08-29 | 2019-08-20 | 接合装置のパラメータ調整方法および接合システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11721596B2 (ja) |
| JP (2) | JP6736799B1 (ja) |
| KR (1) | KR20210046715A (ja) |
| CN (1) | CN112602168B (ja) |
| WO (1) | WO2020045158A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024128046A1 (ja) * | 2022-12-15 | 2024-06-20 | 東京エレクトロン株式会社 | 接合装置、接合システムおよび接合方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017155002A1 (ja) * | 2016-03-11 | 2017-09-14 | ボンドテック株式会社 | 基板接合方法 |
| JP2018026414A (ja) * | 2016-08-09 | 2018-02-15 | 東京エレクトロン株式会社 | 接合装置および接合システム |
| JP2018093018A (ja) * | 2016-12-01 | 2018-06-14 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7513284B2 (en) * | 2004-01-21 | 2009-04-07 | Panasonic Corporation | Compression device |
| JP4548239B2 (ja) * | 2005-06-21 | 2010-09-22 | パナソニック株式会社 | 基板接合方法および基板接合装置 |
| TWI471971B (zh) * | 2007-10-30 | 2015-02-01 | 尼康股份有限公司 | Substrate holding member, substrate bonding apparatus, laminated substrate manufacturing apparatus, substrate bonding method, laminated substrate manufacturing method, and laminated semiconductor device manufacturing method |
| WO2009113312A1 (ja) * | 2008-03-13 | 2009-09-17 | 株式会社ニコン | 半導体装置の設計システム、半導体装置の製造方法、半導体装置および基板貼り合わせ装置 |
| US8578993B2 (en) * | 2008-11-21 | 2013-11-12 | Mitsubishi Heavy Industries, Ltd. | Wafer bonding apparatus |
| JP4831842B2 (ja) * | 2009-10-28 | 2011-12-07 | 三菱重工業株式会社 | 接合装置制御装置および多層接合方法 |
| JP5413149B2 (ja) * | 2009-11-20 | 2014-02-12 | 株式会社ニコン | 重ね合わされた複数の半導体基板を加熱して接合する接合装置における、接合条件の補正方法、および接合装置 |
| JP2012247507A (ja) * | 2011-05-25 | 2012-12-13 | Shibaura Mechatronics Corp | 基板の貼り合せ装置 |
| JP2013008921A (ja) * | 2011-06-27 | 2013-01-10 | Toshiba Corp | 半導体製造装置及び製造方法 |
| JP5756429B2 (ja) * | 2011-10-21 | 2015-07-29 | 東京エレクトロン株式会社 | 貼り合わせ装置及び該貼り合わせ装置を用いた貼り合わせ位置調整方法 |
| JP5606429B2 (ja) * | 2011-12-08 | 2014-10-15 | 東京エレクトロン株式会社 | 接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム |
| JP5705180B2 (ja) * | 2012-08-23 | 2015-04-22 | 東京エレクトロン株式会社 | 検査装置、接合システム、検査方法、プログラム及びコンピュータ記憶媒体 |
| JP5538613B1 (ja) | 2013-11-13 | 2014-07-02 | 東京エレクトロン株式会社 | 接合装置及び接合システム |
| JP6184843B2 (ja) * | 2013-11-18 | 2017-08-23 | 東芝メモリ株式会社 | 基板接合方法、及び基板接合装置 |
| KR101580206B1 (ko) * | 2014-05-28 | 2015-12-24 | 주식회사 엘트린 | 기판 접합 장치 |
| US10580752B2 (en) * | 2014-10-17 | 2020-03-03 | Bondtech Co., Ltd. | Method for bonding substrates together, and substrate bonding device |
| JP6353373B2 (ja) * | 2015-01-16 | 2018-07-04 | 東京エレクトロン株式会社 | 接合装置、接合システムおよび接合方法 |
| TWI701708B (zh) * | 2016-02-24 | 2020-08-11 | 德商蘇士微科技印刷術股份有限公司 | 半導體接合設備及相關技術 |
| TW201826333A (zh) * | 2016-11-16 | 2018-07-16 | 日商尼康股份有限公司 | 保持構件、接合裝置、及接合方法 |
| CN207367937U (zh) * | 2017-11-15 | 2018-05-15 | 德淮半导体有限公司 | 晶圆键合装置 |
| CN108376652B (zh) * | 2018-03-05 | 2019-08-30 | 长江存储科技有限责任公司 | 晶圆键合方法、晶圆键合结构及调整晶圆变形量的方法 |
-
2019
- 2019-08-20 US US17/269,366 patent/US11721596B2/en active Active
- 2019-08-20 KR KR1020217007904A patent/KR20210046715A/ko not_active Application Discontinuation
- 2019-08-20 WO PCT/JP2019/032383 patent/WO2020045158A1/ja active Application Filing
- 2019-08-20 CN CN201980054018.0A patent/CN112602168B/zh active Active
- 2019-08-20 JP JP2020522885A patent/JP6736799B1/ja active Active
-
2020
- 2020-07-14 JP JP2020120755A patent/JP6961046B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017155002A1 (ja) * | 2016-03-11 | 2017-09-14 | ボンドテック株式会社 | 基板接合方法 |
| JP2018026414A (ja) * | 2016-08-09 | 2018-02-15 | 東京エレクトロン株式会社 | 接合装置および接合システム |
| JP2018093018A (ja) * | 2016-12-01 | 2018-06-14 | 東京エレクトロン株式会社 | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6736799B1 (ja) | 2020-08-05 |
| CN112602168B (zh) | 2024-06-18 |
| JP6961046B2 (ja) | 2021-11-05 |
| CN112602168A (zh) | 2021-04-02 |
| JPWO2020045158A1 (ja) | 2020-09-03 |
| KR20210046715A (ko) | 2021-04-28 |
| US20210327773A1 (en) | 2021-10-21 |
| WO2020045158A1 (ja) | 2020-03-05 |
| US11721596B2 (en) | 2023-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6271404B2 (ja) | 接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム | |
| JP6707420B2 (ja) | 接合装置および接合システム | |
| JP6918986B2 (ja) | 接合装置、および接合方法 | |
| JP2015018919A (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| JP6925160B2 (ja) | 接合装置 | |
| JP6861872B2 (ja) | 接合装置および接合システム | |
| JP2017112322A (ja) | 接合装置、接合システムおよび接合方法 | |
| JP6854696B2 (ja) | 接合装置および接合方法 | |
| JP2021141115A (ja) | 接合装置、接合システム、接合方法および記憶媒体 | |
| JP2020127046A (ja) | 接合装置、接合システム、接合方法及びコンピュータ記憶媒体 | |
| JP6961046B2 (ja) | 接合装置のパラメータ調整方法、接合装置および接合システム | |
| JP6895770B2 (ja) | 接合装置および接合システム | |
| JP6742551B2 (ja) | 基板処理装置 | |
| JP6244188B2 (ja) | 接合装置、接合方法および接合システム | |
| JP2017168473A (ja) | 接合装置および接合システム | |
| JP2020141034A (ja) | 基板処理装置、基板処理方法及び接合方法 | |
| JP7001527B2 (ja) | 接合装置および接合方法 | |
| JP2018026415A (ja) | 接合装置および接合システム | |
| WO2024128046A1 (ja) | 接合装置、接合システムおよび接合方法 | |
| WO2020196011A1 (ja) | 接合装置および接合方法 | |
| JP6929427B2 (ja) | 接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体 | |
| JP6752134B2 (ja) | 表面改質装置および接合システム | |
| WO2021015028A1 (ja) | 接合装置、および接合方法 | |
| JP2024006935A (ja) | 接合装置および接合方法 | |
| JP2021093555A (ja) | 接合装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200728 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211012 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6961046 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |