JP2020008561A - 情報提示装置、情報提示方法、及びプログラム - Google Patents
情報提示装置、情報提示方法、及びプログラム Download PDFInfo
- Publication number
- JP2020008561A JP2020008561A JP2019071580A JP2019071580A JP2020008561A JP 2020008561 A JP2020008561 A JP 2020008561A JP 2019071580 A JP2019071580 A JP 2019071580A JP 2019071580 A JP2019071580 A JP 2019071580A JP 2020008561 A JP2020008561 A JP 2020008561A
- Authority
- JP
- Japan
- Prior art keywords
- image
- unit
- destination
- output control
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 26
- 238000004891 communication Methods 0.000 claims description 29
- 238000009795 derivation Methods 0.000 claims description 15
- 230000033001 locomotion Effects 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 8
- 230000007423 decrease Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 26
- 238000012545 processing Methods 0.000 description 17
- 238000003860 storage Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 6
- 239000004973 liquid crystal related substance Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 230000008451 emotion Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000004900 laundering Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000029305 taxis Effects 0.000 description 1
Images
























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3635—Guidance using 3D or perspective road maps
- G01C21/3638—Guidance using 3D or perspective road maps including 3D objects and buildings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/365—Guidance using head up displays or projectors, e.g. virtual vehicles or arrows projected on the windscreen or on the road itself
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/265—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network constructional aspects of navigation devices, e.g. housings, mountings, displays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3605—Destination input or retrieval
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3644—Landmark guidance, e.g. using POIs or conspicuous other objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Architecture (AREA)
- Computer Graphics (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Navigation (AREA)
- User Interface Of Digital Computer (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
(1):この発明の一態様に係る情報提示装置は、現在位置取得部の現在位置を取得する現在位置取得部と、実空間の風景に重畳して見える像を出現させる像生成部と、前記像を出現させる前記実空間上の目標位置を取得する目標位置取得部と、前記現在位置と前記目標位置とに基づいて、前記現在位置から前記目標位置の方向を導出する方向導出部と、前記像生成部を制御し、前記方向導出により取得された方向に基づき前記像を出現させる出力制御部と、を備える情報提示装置。
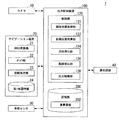
図1は、第1実施形態の出力制御システム1の構成の一例を示す図である。出力制御システム1は、カメラ10と、ナビゲーション装置20と、車両センサ30と、像生成部40と、情報提示装置100とを備える。以下、出力制御システム1が、車両(以下、自車両M)に搭載される場合について説明する。自車両Mは、例えば、二輪や三輪、四輪等の車両である。
図3は、像生成部40によって出現される目的地像VI1aの一例を示す図である。図3に示される目的地方位角ψ1aは、目的地方位角ψ1に対応し、目的地距離L1aは、目的地距離L1に対応する。
図4は、図3よりも目的地距離L1が近い場合に像生成部40によって出現させる目的地像VI1の一例を示す。図4に示される目的地方位角ψ1bは、目的地方位角ψ1に対応し、目的地距離L1bは、目的地距離L1に対応する。目的地像VI1bは、自車両Mの現在位置において出現される目的地像VI1である。図3に示される一例の自車両Mの現在位置と、図4に示される一例の自車両Mの現在位置とは、互いに異なり、目的地距離L1aと、目的地距離L1bとでは、目的地距離L1bの方が短い距離である。
図5は、図3よりも目的地距離L1が遠い場合に像生成部40によって出現させる目的地像VI1の一例を示す。図5に示される目的地方位角ψ1cは、目的地方位角ψ1に対応し、目的地距離L1cは、目的地距離L1に対応する。図3に示される一例の自車両Mの現在位置と、図5に示される一例の自車両Mの現在位置とは、互いに異なり、目的地距離L1aと、目的地距離L1cとでは、目的地距離L1cの方が長い距離である。
図6は、自車両Mの外部状況に応じた目的地像VI1の一例を示す図である。出力制御部128は、例えば、自車両Mの外部状況に応じて、乗員による目的地像VI1の視認のされ方を演出する。外部状況とは、例えば、自車両Mの周囲環境の天候等である。車両センサ30は、例えば、自車両Mの周囲環境における風向きを検出し、出力制御部128は、車両センサ30によって検出された風向きに応じて、風向きの方向にのろしが流れているように視認されるような目的地像VI1(図示する目的地像VI1c)を出現させる。これにより、出力制御システム1は、乗員に、より現実感のある像を提供しつつ目的地DPの案内を行うことができる。
図7は、自車両Mの周囲の建物と、目的地像VI1との関係の一例を側面から示す図である。図8は、自車両Mの周囲の建物と、目的地像VI1との関係の一例を正面から示す図である。図7及び図8に示されるX方向は、自車両Mの前方であり、Y方向は、自車両Mの幅方向であり、Z方向は、自車両Mの上下方向である。
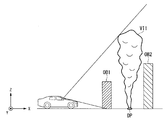
なお、上述では、出力制御部128が、乗員によって入力された目的地DPを示す目的地像VI1を出現させる場合について説明したが、これに限られない。図9は、目的地像VI1の演出の他の例を示す図である。出力制御部128は、例えば、車車間通信によって、自車両Mの近傍に存在する他車両(例えば、他車両m2〜m3)と通信し、他車両が目的地として指定している位置を示す目的地像VI1(図示する目的地像VI1−2〜VI1−3)を出現させてもよい。これにより、乗員が目的地DPを指定しない場合であっても、他車両の乗員が指定している目的地DPを乗員に通知し、ドライブの娯楽性を高めることができる。この場合、他車両の目的地DPに応じた目的地像VI1−2〜VI1−3は、自車両Mの目的地DPに応じた目的地像VI1−1とは、異なる態様(例えば、異なる色)によって出現されてもよい。
出力制御部128は、自車両Mが目的地DPに到着した場合、像生成部40を制御し、目的地像VI1の出現を停止させる。ここで、自車両Mが目的地DPに到着してすぐに目的地像VI1の出現が停止されると、乗員が目的地DPを把握できず、目的地DPを通過してしまう場合がある。したがって、出力制御部128は、自車両Mが目的地DPに到着してから所定時間が経過した後、像生成部40を制御し、目的地像VI1の出現を停止させる。
図10は、第1実施形態の情報提示装置100の処理の一例を示すフローチャートである。図10に示されるフローチャートは、所定の時間間隔で繰り返し実行される。現在位置取得部121は、ナビゲーション装置20から自車両Mの現在位置を示す情報を取得し、目標位置取得部122は、ナビゲーション装置20から目的地DPを示す情報を取得する(ステップS102)。次に、方向導出部124は、現在位置取得部121によって取得された自車両Mの現在位置と、目標位置取得部122によって取得された目的地DPと、車両センサ30によって検出された自車両Mの基準線の方位とに基づいて、自車両Mに対する目的地DPの目的地方位角ψ1を導出する(ステップS104)。次に、距離導出部126は、自車両Mの現在位置と、目的地DPとに基づいて、現在位置から目的地DPまでの目的地距離L1を導出する(ステップS106)。次に、出力制御部128は、導出された目的地方位角ψ1と、目的地距離L1とに基づいて、目的地像VI1を出現させる(ステップS108)。
以上説明した第1実施形態の情報提示装置100によれば、所定のユーザ(この一例では、乗員)が実空間の風景に重畳して見える像(この一例では、目的地像VI1)を出現させる像生成部40と、目的地像VI1を出現させる実空間上の目標位置(この一例では、目的地DP)を取得する目標位置取得部122と、目的地DPに基づいて、乗員に対して目的地像VI1を視認させる方向(この一例では、目的地方位角ψ1)を導出する方向導出部124と、乗員から見て目的地方位角ψ1に目的地像VI1が見えるように、像生成部40を制御する出力制御部128と、を備え、乗員は、目的地DPの方向を直感的に把握することができる。
以下、本発明の第2実施形態について説明する。第2実施形態では、乗員が、出現された像VIに対して各種操作を行う場合について説明する。なお、上述した実施形態と同様の構成については、同一の符号を付して説明を省略する。
図12は、操作認識部130によって認識される操作の一例を示す図である。図12に示される一例において、操作認識部130は、車内カメラ50によって撮像された画像に基づいて、乗員が目的地像VI1ののろしを払うジェスチャーを認識する。このジェスチャーには、目的地DPをキャンセル(消去)する操作が予め対応付けられる。出力制御部128は、操作認識部130の認識結果が「目的地像VI1ののろしを払うジェスチャー」を示すため、像生成部40に目的地像VI1の出現を停止させ、ナビゲーション装置20に目的地DPの消去を示す情報を供給する。これにより、乗員は、目的地DPの消去を容易に行うことができる。
図15は、視線認識部132の認識結果に応じた乗員に対する報知の一例を示す図である。ここで、自車両Mの進行方向と、目的地DPとの位置関係によっては、目的地像VI1が自車両Mの前方に出現されず、乗員が目的地像VI1を視認することができない、或いは目的地像VI1を視認することによって前方不注意となる場合がある。出力制御部128は、視線認識部132の認識結果が、乗員が目的地像VI1を視認していないことを示す場合、自車両Mに設置される複数のスピーカ60のうち、方向導出部124によって導出された目的地方位角ψ1の方向に設置されるスピーカ60に、目的地DPを示す情報(例えば報知音)を出力させる。これにより、乗員は、目的地像VI1を視認できなくても目的地DPの方向を直感的に把握することができる。
図17は、第2実施形態の情報提示装置100aの操作認識部130に係る処理の一例を示すフローチャートである。図17に示されるフローチャートは、所定の時間間隔で繰り返し実行される。まず、出力制御部128は、操作認識部130の認識結果が目的地DPをキャンセルするジェスチャー(例えば、のろしを手で払うジェスチャー)であることを示すか否かを判定する(ステップS202)。出力制御部128は、操作認識部130の認識結果が目的地DPをキャンセルするジェスチャーであることを示す場合、像生成部40に目的地像VI1の出現を停止させる(ステップS204)。次に、出力制御部128は、ナビゲーション装置20に目的地DPを消去することを示す情報を出力し、目的地DPを消去させ(ステップS206)、処理を終了する。
以上説明した第2実施形態の情報提示装置100aにおいて、乗員の操作の内容を認識する操作認識部(この一例では、車内カメラ50)を更に備え、出力制御部128は、操作の内容に基づいて、目的地像VI1を移動させ、または消去する。これにより、第2実施形態の情報提示装置100aは、乗員に目的地DPの変更を容易に行わせることができる。
以下、本発明の第3実施形態について説明する。上述した実施形態では、乗員の目的地DPに目的地像VI1を出現させる場合について説明した。第3実施形態では、予め定められた所定の位置に像VIを出現させる場合について説明する。なお、上述した実施形態と同様の構成については、同一の符号を付して説明を省略する。
図21は、像生成部40によって出現される対象人物位置像VI2の一例を示す図である。図21に示される一例において、対象人物位置像VI2aは、対象人物位置RPの位置を示す像VIであり、自車両Mの現在位置において出現される対象人物位置像VI2である。これにより、乗員は、対象人物の方向を直感的に把握することができる。
また、出力制御部128は、対象人物位置RPによって位置が示される対象人物の状態に応じて、対象人物位置像VI2の演出を行ってもよい。この場合、通信装置70は、ネットワークを介して対象人物の状態を示す情報を受信する。対象人物の状態には、例えば、対象人物の体調、就寝、起床、感情、及び在宅又は不在かのうち、少なくともいずれか1つの状態が含まれる。対象人物は、例えば、通信装置70と通信可能な機器であって、スマートフォンやタブレット型のコンピューター(タブレットPC)等の携帯通信端末装置、又は据置き型の端末装置(例えば、据置き型のパーソナルコンピュータ等)を有する。これらの機器は、対象人物による対象人物の状態を送信する操作が行われた基づくタイミングにおいて、対象人物の状態を示す情報を通信装置70に送信する。
また、本実施形態の操作認識部130は、車内カメラ50によって撮像された画像に基づいて、乗員が対象人物位置像VI2ののろしを掴むジェスチャーを認識する。このジェスチャーには、対象人物位置RPの位置の対象人物に連絡する(例えば、発呼や、定型メールの送信)操作が予め対応付けられる。出力制御部128は、操作認識部130の認識結果が「対象人物位置像VI2ののろしを掴むジェスチャー」を示す場合、対象人物に連絡する。これにより、乗員は、対象人物と容易に連絡を取ることができる。
図23は、第3実施形態の情報提示装置100aの処理の一例を示すフローチャートである。図23に示されるフローチャートは、所定の時間間隔で繰り返し実行される。まず、通信装置70は、対象人物の状態を示す情報を受信する(ステップS402)。次に、出力制御部128は、受信した対象人物の状態に応じた対象人物位置像VI2を出現させる(ステップS404)。次に、出力制御部128は、操作認識部130の認識結果が対象人物に連絡するジェスチャー(例えば、のろしを掴むジェスチャー)であることを示すか否かを判定する(ステップS406)。出力制御部128は、対象人物に連絡するジェスチャーが認識されなかった場合、処理を終了する。次に、出力制御部128は、操作認識部130の認識結果が、対象人物に連絡するジェスチャーであることを示す場合、対象人物に連絡する処理(例えば、発呼や、定型メールの送信)を実行する(ステップS408)。
以上説明した第3実施形態の情報提示装置100cにおいて、目標位置は、乗員によって指定された対象人物の対象人物位置RPであり、乗員は、対象人物の方向や位置を直感的に把握することができる。
以下、本発明の第4実施形態について説明する。上述した実施形態では、情報提示装置100a〜100bが自車両Mに搭載されている場合について説明した。第4実施形態では、情報提示装置100aがユーザの端末装置TMに搭載されている場合について説明する。なお、上述した実施形態と同様の構成については、同一の符号を付して説明を省略する。
図25は、タクシーアプリの実行画面の一例を示す図である。タクシーアプリの実行画面では、アウトカメラ11によって撮像された実空間の画像に、対象車両像VI3(図示する対象車両像VI3a〜VI3b)が重畳して出現(表示)される。具体的には、図25に示される一例において、タクシーmtについての対象車両方位角ψ3aは、対象車両方位角ψ3にお対応し、対象車両距離L3aは、対象車両距離L3に対応する。対象車両像VI3aは、ユーザの周辺に存在するタクシーmtの対象車両位置MPを示す像VIであり、端末装置TMの現在位置において出現される対象車両像VI3である。これにより、ユーザは、タクシーの位置や方向を直感的に把握することができる。
また、出力制御部128は、対象車両位置MPによって位置が示されるタクシーの評価に応じて、対象車両像VI3の演出を行ってもよい。ここで、タクシーアプリによって配車を依頼可能なタクシーには、ランクが付される場合がある。このランクは、例えば、そのタクシーを運転する運転手の評判や、そのタクシーが所属するタクシー会社の評判等に基づくランクであり、ランクが高い程、そのタクシーの評判が良く、ランクが低い程、そのタクシーの評判が悪い。
また、本実施形態の操作認識部130は、インカメラ51によって撮像された画像に基づいて、ユーザが対象車両像VI3ののろしを掴むジェスチャーを認識する。このジェスチャーには、対象車両位置MPの位置のタクシーに配車を依頼する操作が予め対応付けられる。出力制御部128は、操作認識部130の認識結果が「対象車両像VI3ののろしを掴むジェスチャー」を示す場合、当該タクシーに対して配車を要求する。これにより、ユーザは、容易に配車を依頼することができる。なお、通信装置70によって配車要求が承認されたことを示す情報を受信した場合、出力制御部128は、対象車両像VI3の態様を変更してもよい。具体的には、出力制御部128は、配車を要求していないタクシーについては寒色系ののろしの色の対象車両像VI3aを出現させ、配車を要求したタクシーについては暖色系ののろしの色の対象車両像VI3bに変更し、出現させる。
ここで、ユーザは、上述したジェスチャーによってタクシーに配車を要求した後、タクシーアプリの実行画面を視認し続けていない場合がある。この場合、ユーザは、配車を要求したタクシーの到着に気がつくことが困難である。出力制御部128は、タクシーに配車を要求した後に、タクシーアプリが起動されていない場合、又は視線認識部132の認識結果がタクシーアプリの実行画面をユーザが視認していないことを示す場合に、スピーカ61に、タクシーの到着を示す情報(例えば報知音)を出力させる。これにより、乗員は、タクシーアプリを視認し続けていなくてもタクシーの到着を直感的に把握することができる。
出力制御部128は、タクシーがユーザの近傍に到着した場合、表示部41を制御し、対象車両像VI3の出現(表示)を停止させる。ここで、タクシーが到着してすぐに対象車両像VI3の出現が停止されると、ユーザが配車を要求したタクシーを見つけることが困難である場合がある。したがって、出力制御部128は、タクシーが到着してから所定時間が経過した後、或いはユーザが当該タクシーに乗車した後、表示部41を制御し、対象車両像VI3の出現を停止させる。
図26は、第4実施形態の情報提示装置100cの処理の一例を示すフローチャートである。図26に示されるフローチャートは、所定の時間間隔で繰り返し実行される。まず、目標位置取得部122は、端末装置TMの周辺に存在するタクシーの対象車両位置MPを取得する(ステップS502)。方向導出部124は、現在位置取得部121によって取得された端末装置TMの現在位置と、目標位置取得部122によって取得された対象車両位置MPとに基づいて、対象車両方位角ψ3を導出する(ステップS504)。距離導出部126は、端末装置TMの現在位置と、対象車両位置MPとに基づいて、対象車両距離L3を導出する(ステップS506)。出力制御部128は、導出した対象車両方位角ψ3と、対象車両距離L3とに基づいて、表示部41に対象車両像VI3を出現(表示)させる(ステップS508)。
以上説明した第4実施形態の情報提示装置100cにおいて、目標位置は、乗員によって指定された対象車両(この一例では、タクシー)の位置であり、乗員によるタクシーに対する操作の内容を認識する操作認識部(この一例では、車内カメラ50)と、他の装置と通信する通信部(この一例では、通信装置70)とを備え、通信装置70は、操作の内容を示す情報を他の装置(例えば、タクシー)に送信する。これにより、第4実施形態の情報提示装置100cは、乗員にタクシーに配車要求、或いは配車キャンセルを容易に行わせことができる。
なお、像VIがのろしである場合について説明したが、これに限られない。像VIは、目的地DP、対象人物位置RP、或いは対象車両位置MPの地面から、鉛直方向に延びる物体であれば、のろし以外であってもよい。例えば、重畳画像202は、例えば、光の柱を示す画像であってもよく、塔を示す画像であってもよい。この場合、像VIは、光の柱の像であり、塔の像である。また、上述において例示したのろしの色は一例であって、これに限られない。
プログラムを記憶するストレージと、
情報を記憶する記憶装置と、
前記記憶装置に格納されたプログラムを実行するハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサは、前記プログラムを実行することにより、
前記像を出現させる前記実空間上の目標位置を取得させ、
前記目標位置に基づいて、前記所定のユーザに対して前記像を視認させる方向を導出させ、
前記所定のユーザから見て前記方向に前記像が見えるように前記像生成部を制御させる、
ように構成されている、車両制御装置。
Claims (17)
- 現在位置取得部の現在位置を取得する現在位置取得部と、
実空間の風景に重畳して見える像を出現させる像生成部と、
前記像を出現させる前記実空間上の目標位置を取得する目標位置取得部と、
前記現在位置と前記目標位置とに基づいて、前記現在位置から前記目標位置への方向を導出する方向導出部と、
前記像生成部を制御し、前記方向導出により取得された方向に基づき前記像を出現させる出力制御部と、
を備える情報提示装置。 - 前記目標位置と前記現在位置との距離を導出する距離導出部を更に備え、
前記出力制御部は、前記距離が小さくなるほど、前記像を大きくする、
請求項1に記載の情報提示装置。 - 前記出力制御部は、前記距離が所定距離以上である場合、前記像のサイズを所定のサイズに固定する、
請求項2に記載の情報提示装置。 - 前記像生成部は、地面から鉛直方向に延びる像を出現させる、
請求項1から請求項3のいずれか一項に記載の情報提示装置。 - 前記出力制御部は、
前記現在位置から前記目標位置より奥の風景を遮蔽し、且つ前記現在位置から前記目標位置より手前の風景を遮蔽しない前記像を出現させる、
請求項1から請求項4のいずれか一項に記載の情報提示装置。 - 実空間の状況を認識する実空間認識部を更に備え、
前記出力制御部は、
前記実空間認識部によって認識された前記実空間の状況に応じて、前記像の態様を決定する、
請求項1から請求項5のいずれか一項に記載の情報提示装置。 - 前記実空間認識部は、実空間における風の動きを認識し、
前記出力制御部は、前記風の動きに応じて前記像を動かす、
請求項6に記載の情報提示装置。 - ユーザの操作の内容を認識する操作認識部を更に備え、
前記出力制御部は、
前記操作の内容に基づいて、前記像を移動させ、または消去する、
請求項1から請求項7のいずれか一項に記載の情報提示装置。 - ユーザの視線を検出する視線検出部と、
前記視線検出部の検出結果が、前記ユーザが前記像を視認していないことを示す場合、前記ユーザに前記目標位置の方向を示す情報を出力する報知部と、
を更に備える請求項1から請求項8のいずれか一項に記載の情報提示装置。 - 前記目標位置は、ユーザの目的地である、
請求項1から請求項9のいずれか一項に記載の情報提示装置。 - 前記目標位置は、ユーザによって指定された対象人物の位置である、
請求項1から請求項10のいずれか一項に記載の情報提示装置。 - 前記出力制御部は、前記対象人物の状態に応じて、前記像の態様を決定する、
請求項11に記載の情報提示装置。 - 前記目標位置は、ユーザによって指定された対象車両の位置である、
請求項1から請求項12のいずれか一項に記載の情報提示装置。 - 前記ユーザによる前記対象車両に対する操作の内容を認識する操作認識部と、
他の装置と通信する通信部とを備え、
前記通信部は、前記操作の内容を示す情報を前記他の装置に送信する、
請求項13に記載の情報提示装置。 - 前記出力制御部は、前記操作認識部の認識結果に基づいて、前記像の態様を決定する、
請求項14に記載の情報提示装置。 - 表示部と、所定のユーザが実空間の風景に重畳して見える像を出現させる像生成部とを備える出力制御システムのコンピュータが、
前記表示部の現在位置を取得し、
前記像を出現させる前記実空間上の目標位置を取得し、
前記現在位置と前記目標位置とに基づいて、前記現在位置から前記目標位置の方向を導出し、
前記像生成部を制御し、前記方向に前記像を出現させる、
情報提示方法。 - 表示部と、所定のユーザが実空間の風景に重畳して見える像を出現させる像生成部とを備える出力制御システムのコンピュータに、
前記表示部の現在位置を取得させ、
前記像を出現させる前記実空間上の目標位置を取得させ、
前記現在位置と前記目標位置とに基づいて、前記現在位置から前記目標位置の方向を導出させ、
前記像生成部を制御させ、前記方向に前記像を出現させる、
プログラム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/028,725 US10876853B2 (en) | 2018-07-06 | 2018-07-06 | Information presentation device, information presentation method, and storage medium |
| US16/028,725 | 2018-07-06 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020008561A true JP2020008561A (ja) | 2020-01-16 |
| JP7361486B2 JP7361486B2 (ja) | 2023-10-16 |
Family
ID=69101381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019071580A Active JP7361486B2 (ja) | 2018-07-06 | 2019-04-03 | 情報提示装置、情報提示方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10876853B2 (ja) |
| JP (1) | JP7361486B2 (ja) |
| CN (1) | CN110686696A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7267499B2 (ja) * | 2020-02-27 | 2023-05-01 | 三菱電機株式会社 | 合流支援システムおよび合流支援方法 |
Citations (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001296134A (ja) * | 2000-04-14 | 2001-10-26 | Mitsubishi Electric Corp | 地図情報表示装置 |
| JP2003291688A (ja) * | 2002-04-03 | 2003-10-15 | Denso Corp | 表示方法、運転支援装置、プログラム |
| JP2005069776A (ja) * | 2003-08-21 | 2005-03-17 | Denso Corp | 車両用表示方法、車両用表示装置 |
| JP2005106650A (ja) * | 2003-09-30 | 2005-04-21 | Mazda Motor Corp | 車両用情報提供装置 |
| JP2005138755A (ja) * | 2003-11-07 | 2005-06-02 | Denso Corp | 虚像表示装置およびプログラム |
| JP2005241385A (ja) * | 2004-02-25 | 2005-09-08 | Sony Ericsson Mobilecommunications Japan Inc | 目的地案内装置および携帯端末装置 |
| JP2007003328A (ja) * | 2005-06-23 | 2007-01-11 | Denso Corp | カーナビゲーション装置 |
| WO2008117712A1 (ja) * | 2007-03-26 | 2008-10-02 | Toyota Jidosha Kabushiki Kaisha | ナビゲーション装置 |
| JP2009092520A (ja) * | 2007-10-09 | 2009-04-30 | Denso Corp | ナビゲーション装置およびナビゲーション装置用のプログラム |
| WO2009072366A1 (ja) * | 2007-12-05 | 2009-06-11 | Bosch Corporation | 車両情報表示装置 |
| JP2009226978A (ja) * | 2008-03-19 | 2009-10-08 | Mazda Motor Corp | 車両用周囲監視装置 |
| US20100063655A1 (en) * | 2008-09-05 | 2010-03-11 | Thales | Viewing device for aircraft comprising means of displaying the final destination and associated display method |
| JP2011095238A (ja) * | 2009-09-30 | 2011-05-12 | Aisin Aw Co Ltd | ナビゲーション装置及びプログラム |
| US20120174004A1 (en) * | 2010-12-30 | 2012-07-05 | GM Global Technology Operations LLC | Virtual cursor for road scene object lelection on full windshield head-up display |
| WO2013136447A1 (ja) * | 2012-03-13 | 2013-09-19 | パイオニア株式会社 | 表示情報生成装置、表示情報生成方法及び表示情報生成用プログラム並びに情報記録媒体 |
| JP2013231655A (ja) * | 2012-04-27 | 2013-11-14 | Fujitsu Ten Ltd | 表示システム、携帯装置、車載装置、及び、プログラム |
| JP2016091192A (ja) * | 2014-10-31 | 2016-05-23 | パイオニア株式会社 | 虚像表示装置、制御方法、プログラム、及び記憶媒体 |
| JP2017009628A (ja) * | 2015-06-16 | 2017-01-12 | 株式会社リコー | 光走査装置 |
| JP2017111649A (ja) * | 2015-12-17 | 2017-06-22 | 大学共同利用機関法人自然科学研究機構 | 視覚認知支援システムおよび視認対象物の検出システム |
| WO2018037954A1 (ja) * | 2016-08-26 | 2018-03-01 | ソニー株式会社 | 移動体制御装置、移動体制御方法、及び、移動体 |
| US20180075287A1 (en) * | 2016-09-14 | 2018-03-15 | General Motors Llc | Identifying a vehicle using a mobile device |
| JP2018078655A (ja) * | 2013-11-21 | 2018-05-17 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報通信方法、情報通信装置、およびプログラム |
| US20180357824A1 (en) * | 2017-06-08 | 2018-12-13 | Baidu Online Network Technology (Beijing) Co., Ltd | Augmented Reality Positioning Method and Apparatus for Location-Based Service LBS |
| JP2019095213A (ja) * | 2017-11-17 | 2019-06-20 | アイシン・エィ・ダブリュ株式会社 | 重畳画像表示装置及びコンピュータプログラム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5008556B2 (ja) | 2004-06-03 | 2012-08-22 | メイキング バーチャル ソリッド,エル.エル.シー. | ヘッドアップ表示を使用する途上ナビゲーション表示方法および装置 |
| JP2007292713A (ja) * | 2006-03-30 | 2007-11-08 | Denso Corp | ナビゲーション装置 |
| JP5231595B2 (ja) * | 2006-03-30 | 2013-07-10 | 株式会社デンソー | ナビゲーション装置 |
| JP2008151754A (ja) | 2006-12-20 | 2008-07-03 | Pioneer Electronic Corp | 経路誘導装置、経路誘導方法、経路誘導プログラムおよび記録媒体 |
| US8629903B2 (en) * | 2009-04-02 | 2014-01-14 | GM Global Technology Operations LLC | Enhanced vision system full-windshield HUD |
| US9292093B2 (en) * | 2010-11-18 | 2016-03-22 | Alpine Electronics, Inc. | Interface method and apparatus for inputting information with air finger gesture |
| US20120224060A1 (en) * | 2011-02-10 | 2012-09-06 | Integrated Night Vision Systems Inc. | Reducing Driver Distraction Using a Heads-Up Display |
| JP2012208705A (ja) * | 2011-03-29 | 2012-10-25 | Nec Casio Mobile Communications Ltd | 画像操作装置、画像操作方法およびプログラム |
| US9533772B2 (en) * | 2014-07-09 | 2017-01-03 | Honeywell International Inc. | Visual search assistance for an occupant of a vehicle |
| KR101750876B1 (ko) * | 2015-05-28 | 2017-06-26 | 엘지전자 주식회사 | 차량용 디스플레이 장치 및 차량 |
| JP6516241B2 (ja) * | 2015-10-28 | 2019-05-22 | アルパイン株式会社 | ジェスチャ入力装置 |
| US20180096668A1 (en) * | 2016-09-30 | 2018-04-05 | Ford Global Technologies, Llc | Hue adjustment of a vehicle display based on ambient light |
-
2018
- 2018-07-06 US US16/028,725 patent/US10876853B2/en active Active
-
2019
- 2019-04-03 JP JP2019071580A patent/JP7361486B2/ja active Active
- 2019-05-27 CN CN201910448426.6A patent/CN110686696A/zh active Pending
Patent Citations (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001296134A (ja) * | 2000-04-14 | 2001-10-26 | Mitsubishi Electric Corp | 地図情報表示装置 |
| JP2003291688A (ja) * | 2002-04-03 | 2003-10-15 | Denso Corp | 表示方法、運転支援装置、プログラム |
| JP2005069776A (ja) * | 2003-08-21 | 2005-03-17 | Denso Corp | 車両用表示方法、車両用表示装置 |
| JP2005106650A (ja) * | 2003-09-30 | 2005-04-21 | Mazda Motor Corp | 車両用情報提供装置 |
| JP2005138755A (ja) * | 2003-11-07 | 2005-06-02 | Denso Corp | 虚像表示装置およびプログラム |
| JP2005241385A (ja) * | 2004-02-25 | 2005-09-08 | Sony Ericsson Mobilecommunications Japan Inc | 目的地案内装置および携帯端末装置 |
| JP2007003328A (ja) * | 2005-06-23 | 2007-01-11 | Denso Corp | カーナビゲーション装置 |
| WO2008117712A1 (ja) * | 2007-03-26 | 2008-10-02 | Toyota Jidosha Kabushiki Kaisha | ナビゲーション装置 |
| JP2009092520A (ja) * | 2007-10-09 | 2009-04-30 | Denso Corp | ナビゲーション装置およびナビゲーション装置用のプログラム |
| WO2009072366A1 (ja) * | 2007-12-05 | 2009-06-11 | Bosch Corporation | 車両情報表示装置 |
| JP2009226978A (ja) * | 2008-03-19 | 2009-10-08 | Mazda Motor Corp | 車両用周囲監視装置 |
| US20100063655A1 (en) * | 2008-09-05 | 2010-03-11 | Thales | Viewing device for aircraft comprising means of displaying the final destination and associated display method |
| JP2011095238A (ja) * | 2009-09-30 | 2011-05-12 | Aisin Aw Co Ltd | ナビゲーション装置及びプログラム |
| US20120174004A1 (en) * | 2010-12-30 | 2012-07-05 | GM Global Technology Operations LLC | Virtual cursor for road scene object lelection on full windshield head-up display |
| WO2013136447A1 (ja) * | 2012-03-13 | 2013-09-19 | パイオニア株式会社 | 表示情報生成装置、表示情報生成方法及び表示情報生成用プログラム並びに情報記録媒体 |
| JP2013231655A (ja) * | 2012-04-27 | 2013-11-14 | Fujitsu Ten Ltd | 表示システム、携帯装置、車載装置、及び、プログラム |
| JP2018078655A (ja) * | 2013-11-21 | 2018-05-17 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報通信方法、情報通信装置、およびプログラム |
| JP2016091192A (ja) * | 2014-10-31 | 2016-05-23 | パイオニア株式会社 | 虚像表示装置、制御方法、プログラム、及び記憶媒体 |
| JP2017009628A (ja) * | 2015-06-16 | 2017-01-12 | 株式会社リコー | 光走査装置 |
| JP2017111649A (ja) * | 2015-12-17 | 2017-06-22 | 大学共同利用機関法人自然科学研究機構 | 視覚認知支援システムおよび視認対象物の検出システム |
| WO2018037954A1 (ja) * | 2016-08-26 | 2018-03-01 | ソニー株式会社 | 移動体制御装置、移動体制御方法、及び、移動体 |
| US20180075287A1 (en) * | 2016-09-14 | 2018-03-15 | General Motors Llc | Identifying a vehicle using a mobile device |
| US20180357824A1 (en) * | 2017-06-08 | 2018-12-13 | Baidu Online Network Technology (Beijing) Co., Ltd | Augmented Reality Positioning Method and Apparatus for Location-Based Service LBS |
| JP2019095213A (ja) * | 2017-11-17 | 2019-06-20 | アイシン・エィ・ダブリュ株式会社 | 重畳画像表示装置及びコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US10876853B2 (en) | 2020-12-29 |
| US20200011695A1 (en) | 2020-01-09 |
| CN110686696A (zh) | 2020-01-14 |
| JP7361486B2 (ja) | 2023-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11676346B2 (en) | Augmented reality vehicle interfacing | |
| US11900815B2 (en) | Augmented reality wayfinding in rideshare applications | |
| US11155268B2 (en) | Utilizing passenger attention data captured in vehicles for localization and location-based services | |
| JP6524422B2 (ja) | 表示制御装置、表示装置、表示制御プログラム、及び表示制御方法 | |
| JP5921320B2 (ja) | 表示システム、携帯装置、車載装置、及び、プログラム | |
| JP7236442B2 (ja) | 自動車における表示デバイスの制御方法 | |
| JP2019109707A (ja) | 表示制御装置、表示制御方法および車両 | |
| US10232710B2 (en) | Wireless data sharing between a mobile client device and a three-dimensional heads-up display unit | |
| JP7232604B2 (ja) | ナビゲーションシステム、ナビゲーション表示方法、およびナビゲーション表示プログラム | |
| JP6186905B2 (ja) | 車載表示装置およびプログラム | |
| JP2019028541A (ja) | 情報処理装置、管理装置、制御プログラム、情報処理装置の動作方法及びデータ構造 | |
| JP7361486B2 (ja) | 情報提示装置、情報提示方法、及びプログラム | |
| JP2019028542A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| CN116972873A (zh) | 导航信息显示方法、装置、设备、存储介质及程序产品 | |
| JP2019117435A (ja) | 画像生成装置 | |
| JP2020123071A (ja) | 車載装置および表示方法 | |
| JP2019117434A (ja) | 画像生成装置 | |
| JP7333445B2 (ja) | 画像生成装置 | |
| US20240105052A1 (en) | Information management device, information management method and storage medium | |
| WO2019065699A1 (ja) | 端末装置 | |
| JP2019012152A (ja) | 表示制御システム、表示システム、表示制御方法、プログラム、及び移動体 | |
| US20240011788A1 (en) | Animated route preview facilitated by autonomous vehicles | |
| JP2019028533A (ja) | 情報処理装置、管理装置、携帯型電子機器、制御プログラム、情報処理装置の動作方法、携帯型電子機器の動作方法及びデータ構造 | |
| JP2021136584A (ja) | 映像情報出力装置 | |
| KR20220046553A (ko) | 자율 차량 상호 작용 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230418 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231003 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7361486 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |